TL;DR
This paper introduces a block coordinate RED algorithm for large-scale estimation problems, combining theoretical convergence analysis with numerical validation using CNN denoisers, advancing plug-and-play prior methods.
Contribution
Develops a novel block coordinate RED algorithm that decomposes large problems, with theoretical convergence analysis and validation using CNN-based denoisers.
Findings
Algorithm converges under certain conditions
Effective with CNN denoisers in imaging tasks
Extends theoretical understanding of RED methods
Abstract
We consider the problem of estimating a vector from its noisy measurements using a prior specified only through a denoising function. Recent work on plug-and-play priors (PnP) and regularization-by-denoising (RED) has shown the state-of-the-art performance of estimators under such priors in a range of imaging tasks. In this work, we develop a new block coordinate RED algorithm that decomposes a large-scale estimation problem into a sequence of updates over a small subset of the unknown variables. We theoretically analyze the convergence of the algorithm and discuss its relationship to the traditional proximal optimization. Our analysis complements and extends recent theoretical results for RED-based estimation methods. We numerically validate our method using several denoiser priors, including those based on convolutional neural network (CNN) denoisers.
Click any figure to enlarge with its caption.
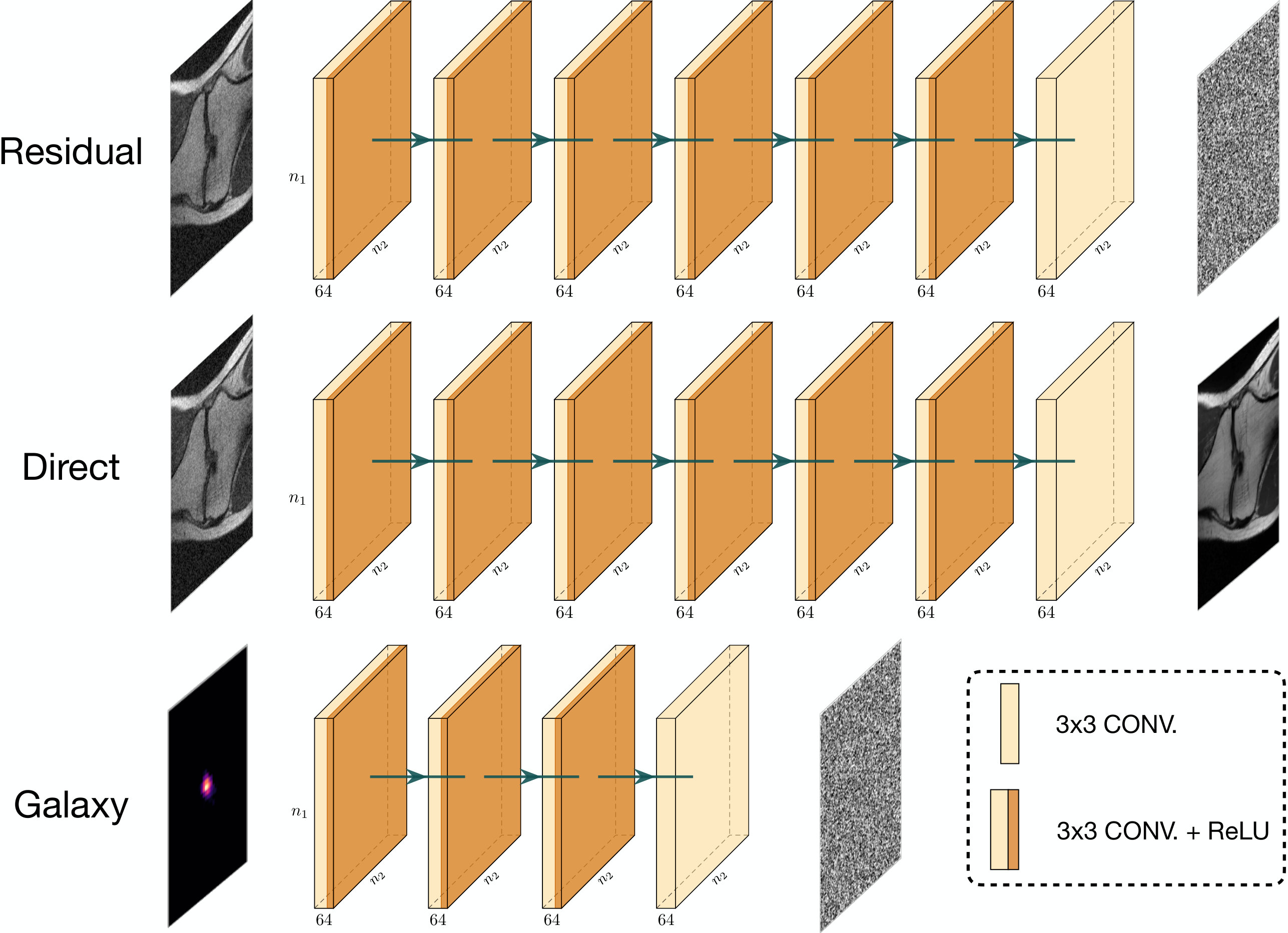 Figure 1
Figure 1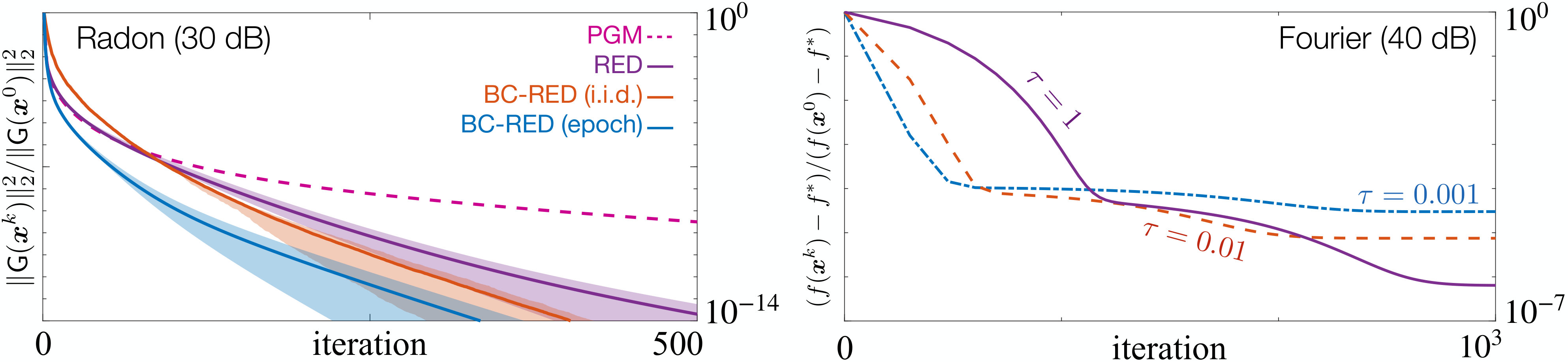 Figure 2
Figure 2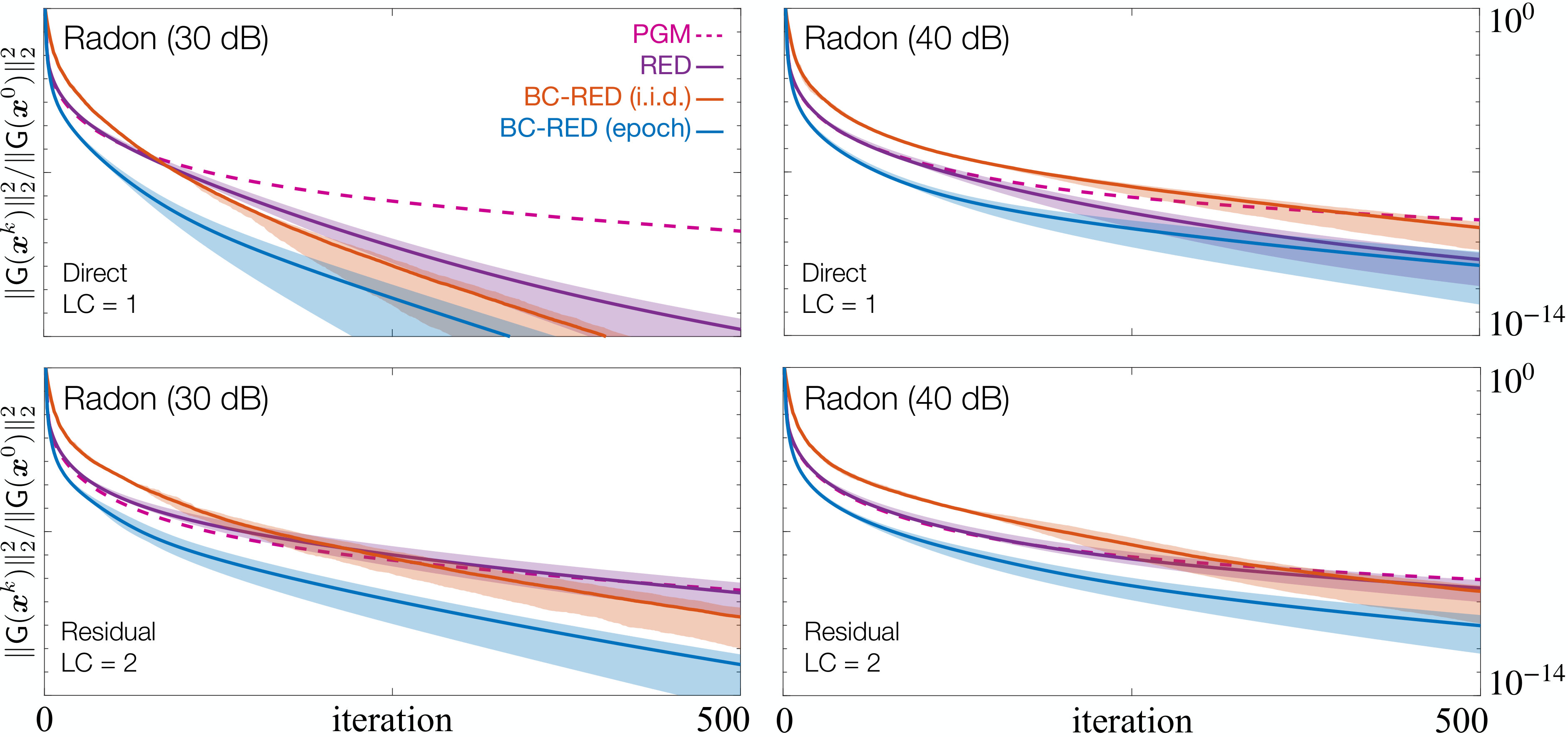 Figure 3
Figure 3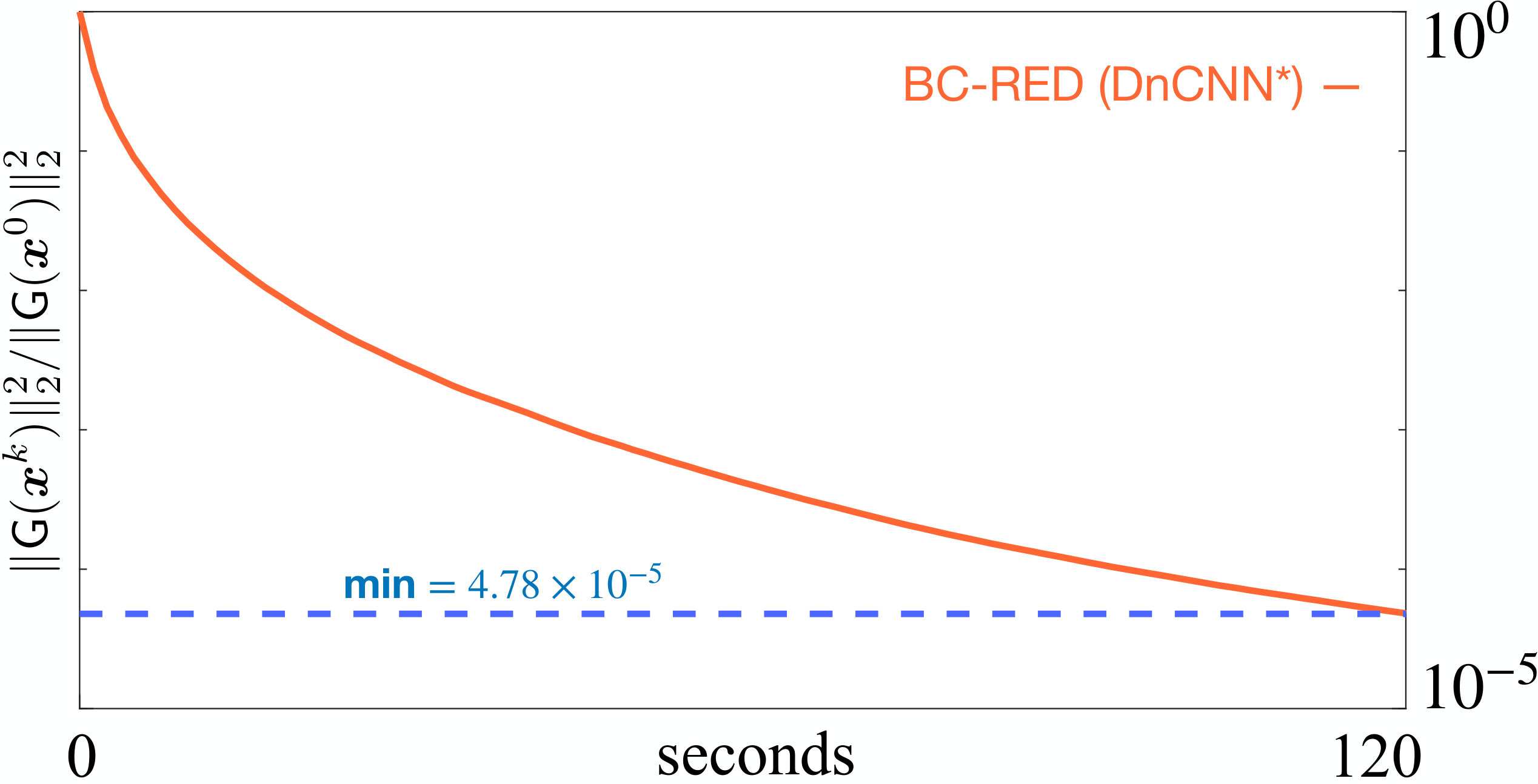 Figure 4
Figure 4 Figure 5
Figure 5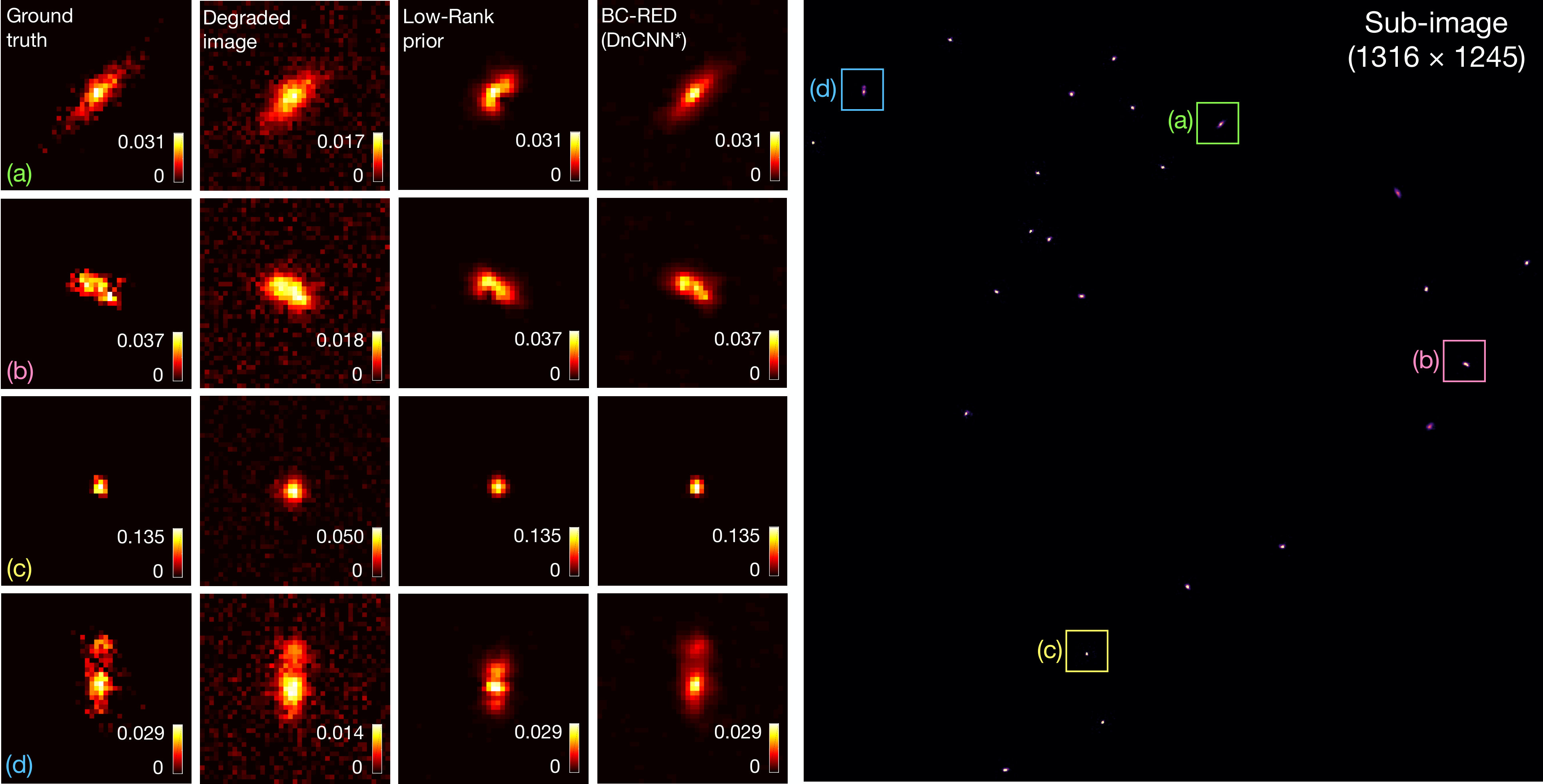 Figure 6
Figure 6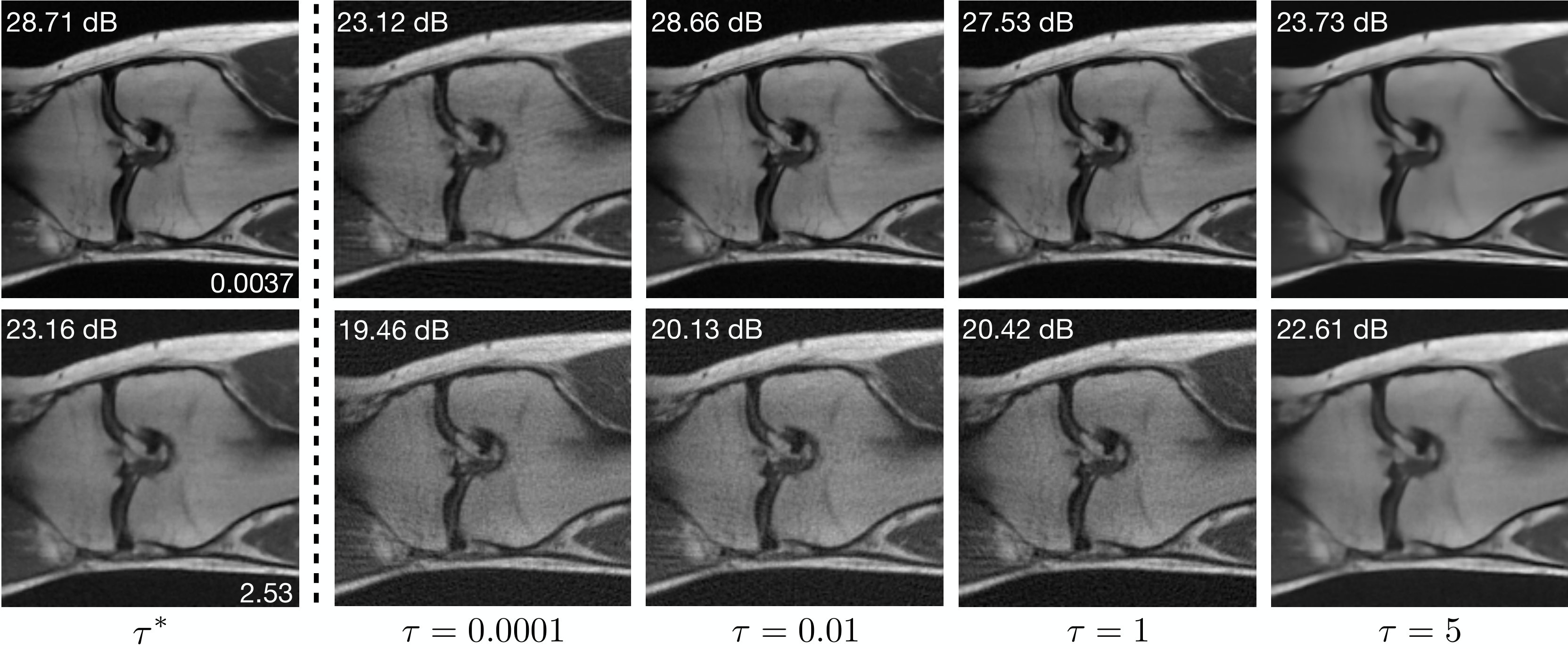 Figure 7
Figure 7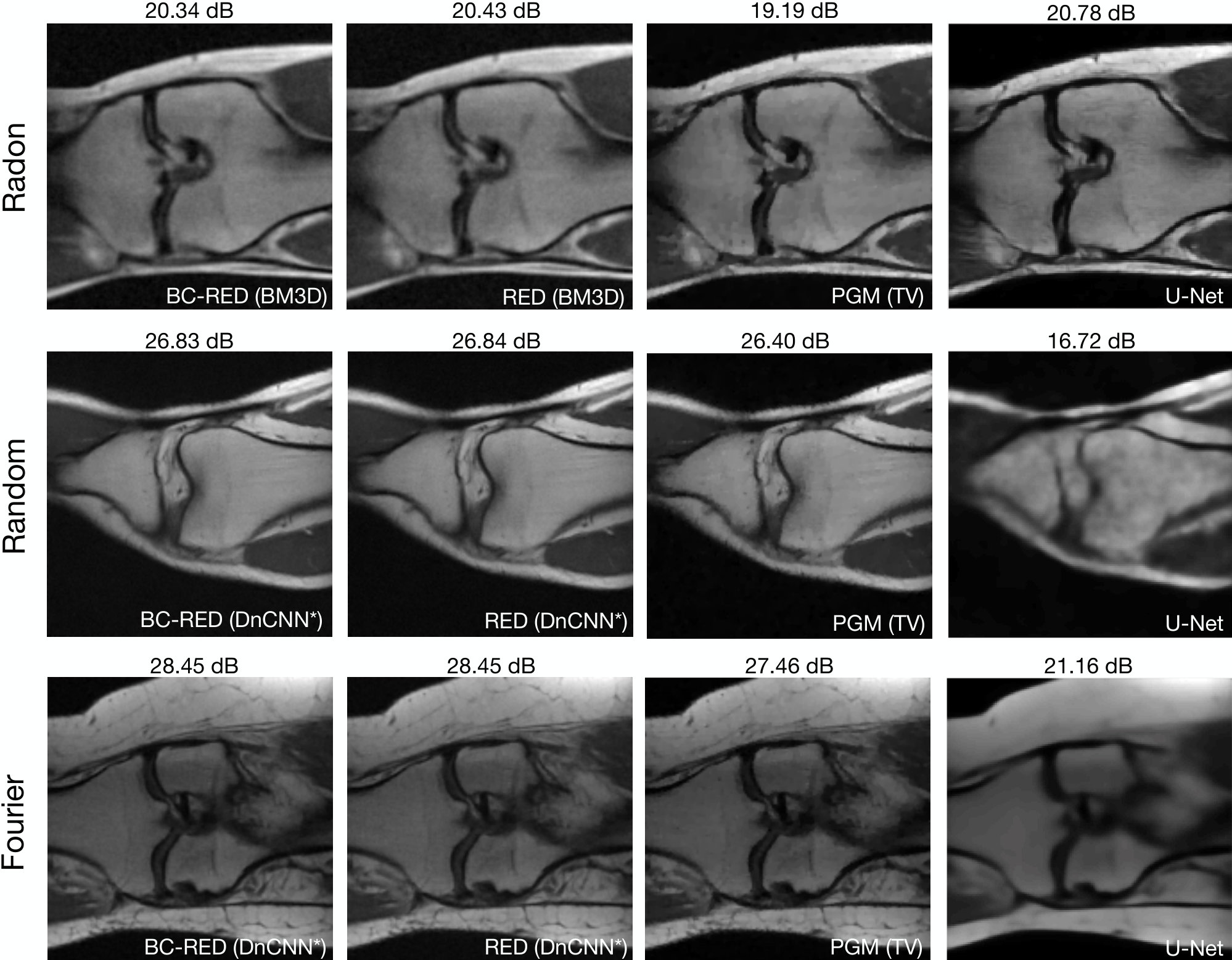 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Code & Models
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
