Kinetic Brownian motion on the diffeomorphism group of a closed Riemannian manifold
J. Angst, I. Bailleul, P. Perruchaud

TL;DR
This paper introduces kinetic Brownian motion on the diffeomorphism group of a closed Riemannian manifold, bridging fluid dynamics and stochastic flows with a novel mathematical framework.
Contribution
It defines a new stochastic process on the diffeomorphism group that interpolates between hydrodynamic flow and Brownian motion.
Findings
Establishes the mathematical foundation for kinetic Brownian motion on diffeomorphism groups.
Shows the process interpolates between fluid flow and Brownian motion.
Provides potential applications in fluid dynamics and stochastic analysis.
Abstract
We define kinetic Brownian motion on the diffeomorphism group of a closed Riemannian manifold, and prove that it provides an interpolation between the hydrodynamic flow of a fluid and a Brownian-like flow.
Click any figure to enlarge with its caption.
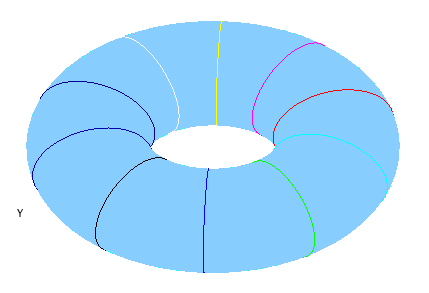 Figure 1
Figure 1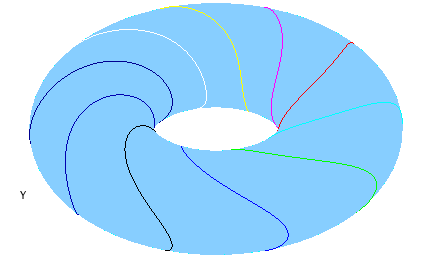 Figure 2
Figure 2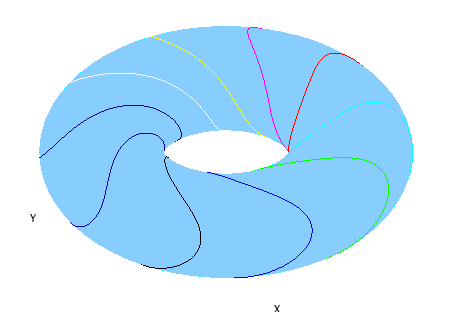 Figure 3
Figure 3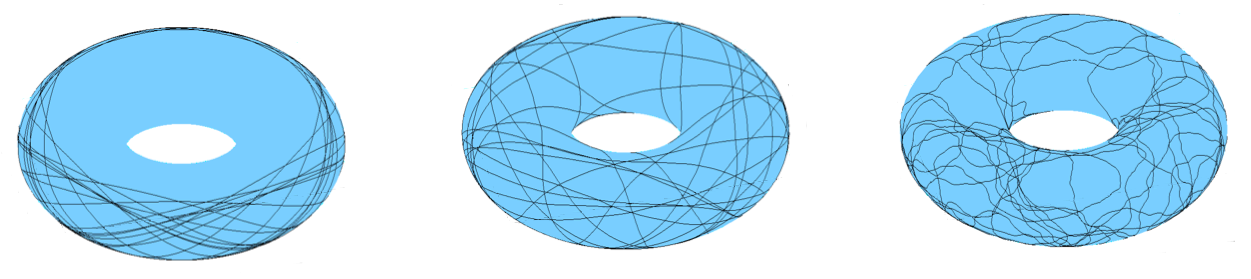 Figure 4
Figure 4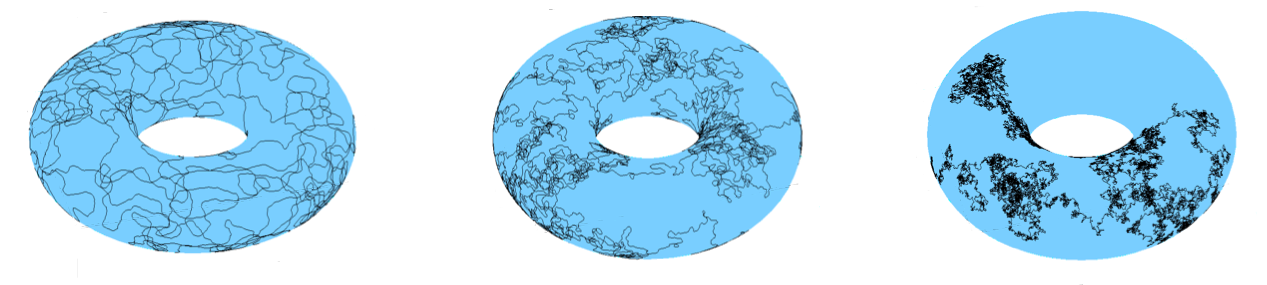 Figure 5
Figure 5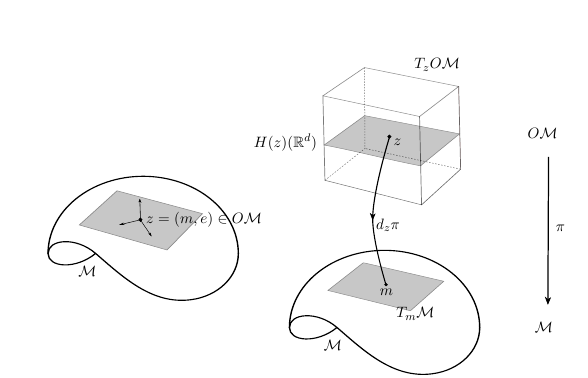 Figure 6
Figure 6 Figure 7
Figure 7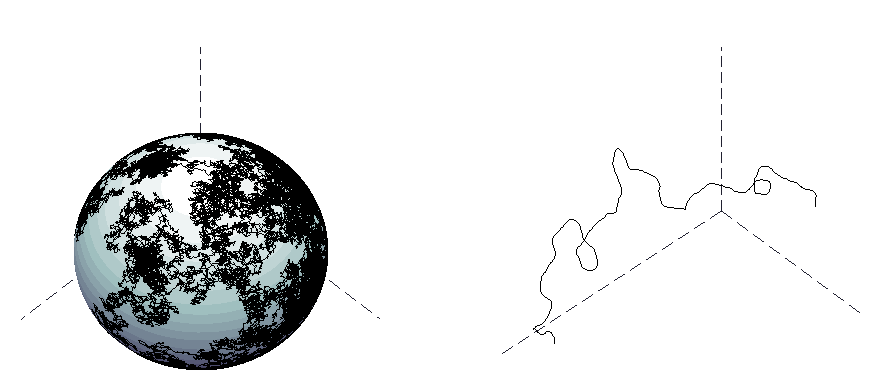 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Kinetic Brownian motion on the diffeomorphism group of a closed Riemannian manifold
J. Angst
Univ Rennes, CNRS, IRMAR - UMR 6625, F-35000 Rennes, France
I. Bailleul
Univ Rennes, CNRS, IRMAR - UMR 6625, F-35000 Rennes, France
P. Perruchaud
Univ Rennes, CNRS, IRMAR - UMR 6625, F-35000 Rennes, France
Abstract.
We define kinetic Brownian motion on the diffeomorphism group of a closed Riemannian manifold, and prove that it provides an interpolation between the hydrodynamic flow of a fluid and a Brownian-like flow.
Key words and phrases:
Diffeomorphism group; EPDiff; Stochastic Euler equation; Cartan development; Brownian flow
1991 Mathematics Subject Classification:
Primary 60H10, 60H30; Secondary 76N99, 58D05, 60H15
The authors thank A. Kulik for helful conversations on ergodic properties of Markov processes. I.Bailleul thanks the U.B.O. for their hospitality, part of this work was written there.
Contents
1. Introduction
Kinetic Brownian motion is a purely geometric random perturbation of geodesic motion. In its simplest form, in , the sample paths of kinetic Brownian motion are random paths run at unit speed, with velocity a Brownian motion on the unit sphere, run at speed , for a speed parameter . More formally, it is a hypoelliptic diffusion with state space , solution to the stochastic differential equation
[TABLE]
for , the orthogonal projection on the orthogonal of , for in , and a standard -valued Brownian motion. If , we have a straight line motion with constant velocity. For a fixed , we have a random path, whose typical behavior is illustrated in Figure 1 below.
For increasing to , the exponentially fast decorrelation of the velocity process on the sphere implies that the process converges to the constant path , if the latter is fixed independently of . One has to rescale time and look at the evolution at the time scale to see a non-trivial limit. It is indeed elementary to prove that the time rescaled position process of kinetic Brownian motion converges weakly in C\big{(}[0,1],\mathbb{R}^{d}\big{)} to a Brownian motion with generator . See Figure 2 below for an illustration in the setting of the flat -dimensional torus. This homogenization result is in fact valid on a general finite dimensional Riemannian manifold , under very mild geometric assumptions.
Kinetic Brownian motion on a -dimensional Riemannian manifold is defined as Cartan development \big{(}m^{\sigma}_{t},\dot{m}^{\sigma}_{t}\big{)} in the unit tangent bundle of of kinetic Brownian motion in . It is a geodesic for , and a random path for a finite positive value of . It was first proved by X.-M. Li in [Li12] that the time-rescaled position process converges weakly to Brownian motion with generator . The manifold was assumed to be compact and martingale methods were used to prove that homogenization result. X.-M. Li extended this result in [Li16] to non-compact manifolds subject to a growth condition on their curvature tensor. In [ABT15], Angst, Bailleul and Tardif gave the most general result, assuming only geodesic and stochastic completeness, using rough paths theory as a working horse to transport a rough path convergence result about kinetic Brownian motion in to the manifold setting. See also [Li18] for further results in homogeneous spaces, and [Per18] for a generalization of the homogenization result of [ABT15] to anisotropic kinetic Brownian motion, or more general Markov processes on . Note that the dynamically obvious convergence of the unrescaled kinetic Brownian motion to the geodesic motion has been studied from the spectral point of view in [Dro17], for compact manifolds with negative curvature, showing that the spectrum of the generator of the unrescaled kinetic Brownian motion converges to the Pollicott-Ruelle resonances of . Other examples of homogenization results for Langevin-type processes include works by Hottovy and co-authors, amongst others; see e.g. [BVW17, HV16, BW18, LWL19] for quantitative convergence results. See also [Sol95, Kol00, AHK12, Gli11] for other works on Langevin dynamics in a Riemannian manifold.
This kind of homogenization result certainly echoes Bismut’s program about his hypoelliptic Laplacian [Bis05, Bis15], whose probabilistic starting point is a similar interpolation result for Langevin process in and its Cartan development on a Riemannian manifold. The dynamics is lifted to a dynamics on the space of differential forms to take advantage of the correspondence between the cohomology of differential forms and homology of , via index-type theorems. See [Bis11, Bis15, Bis16, She16] for a sample of the deep results obtained by Bismut and co-authors on the hypoelliptic Laplacian.
Note also that kinetic Brownian motion is the Riemannian analogue of its Lorentzian counterpart, introduced first by Dudley in [Dud66] in Minkowski spacetime in the 60’s. See the far reaching related works [FLJ07, Bai10, FLJ11, BF12], on relativistic diffusions in a general Lorentzian setting. No homogenization result is expected for these purely geometric diffusion processes, unless one has an additional non-geometric ingredient, e.g. in the form of a relativistic fluid flow, like in [AF07].
The object of the present work is to define and study kinetic Brownian motion in the diffeomorphism group , or volume preserving diffeomorphism group , of a closed Riemannian manifold . As in the finite dimensional setting, we prove that it provides an interpolation between the geodesic flow and a Brownian flow, as the noise intensity parameter ranges from [math] to . For , the motion in each diffeomorphism group is geodesic, and it corresponds to the flow of the solutions of Euler’s equation in the case of , after the seminal works of Arnold [Arn66] and Ebin & Marsden [EM69]. When considered in the setting of volume preserving diffeomorphisms, the Eulerian picture of kinetic Brownian motion provides a family of random perturbations of Euler’s equations for the hydrodynamics of an incompressible fluid. There has been much work recently on random perturbations of Euler’s equations, following Holm’s seminal article [Hol15]. See [GBH17, CHR18, CFH18, DH18, BdLHLT19] for a sample. The structure of the noise in these works is intrinsically linked to the group structure of the diffeomorphism group, and it amounts to perturbe Euler’s equation for the velocity field by an additive Brownian term, with values in a space of vector fields on the fluid domain . Our point of view is purely Riemannian, and does not appeal to the group structure of the diffeomorphism group of the fluid domain . As in the above finite dimensional setting, we define kinetic Brownian on the diffeomorphism group as the Cartan development of its ‘flat’ counterpart. Unlike the group-oriented point of view, where the running time diffeomorphism is sufficient to describe its infinitesimal increment from the noise, we need here a notion of frame of the tangent space of the running diffeomorphism to build its increment from the noise. We prove that each component of the energy spectrum of the Eulerian velocity field is ergodic, and give an explicit description of its invariant measure. We also have an explicit description of the invariant measure of the energy of the Eulerian velocity field.
On the technical side, we use rough paths theory to transport a weak convergence result for the flat kinetic Brownian motion taking values in the tangent space to the configuration space , or , to a weak convergence result for the solution of a differential equation controlled by that flat kinetic Brownian motion. We use for that purpose the continuity of the Itô-Lyons solution map to a controlled ordinary differential equation, in the present infinite dimensional setting. This allows to bypass a number of difficulties that would appear otherwise if using the classical martingale problem approach, as in [Li12, Li16]. All we need about rough paths theory is recalled in Section 2.4.
From a geometric point of view, the tangent space to the configuration space can naturally be seen as an infinite dimensional Hilbert space. For this reason, we define and study in Section 2 kinetic Brownian motion on a generic infinite dimensional Hilbert space . We provide an explicit description of the invariant measure of the velocity process in Section 2.1, and we establish exponential decorrelation identities for the latter in Section 2.2. The invariance principle for the position process associated to the time-rescaled -valued kinetic Brownian motion is then established in Section 2.3. With the rough paths tools introduced in Section 2.4, Section 2.5 is devoted to the proof of the fact that the canonical rough path above the time-rescaled position process converges weakly as a rough path to the Stratonovich Brownian rough path of a Brownian motion with an explicit covariance. Elements of the geometry of the configuration spaces and are recalled in Section 3. We develop in particular in Section 3.3 and Section 3.4 the material needed to talk about Cartan development operation as solving an ordinary differential equation driven by smooth vector fields. The final homogenisation result, proving the interpolation between geodesic and Brownian flows on the configuration spaces, is proved in Section 4 using the robust tools of rough paths theory. Appendix A contains the proof of a technical result about Cartan development in .
Notations. We gather here a number of notations that are used throughout the article.
- •
The letter stands for a Gaussian measure on a Hilbert space , with covariance , and associated operator . The scalar product and norm on are denoted by and , respectively.
- •
We denote by the Cameron-Martin space of the measure .
- •
We endow the algebraic tensor space with its natural Hilbert norm. This amounts to identify with the space of Hilbert-Schmidt operators on .
- •
We use the notation for an inequality of the form , with a constant depending only on .
2. Kinetic Brownian motion in a Hilbert space
2.1. Brownian motion on a Hilbert sphere
We first recall basic results on Brownian motion in , and refer the reader to the nice lecture notes [Hai12, Str93] for short and detailed accounts.
Recall that a Gaussian probability measure on is a Borel measure such that is a real Gaussian probability on , for every continuous linear functional . Fernique’s theorem [Fer70] ensures that
[TABLE]
for a small enough positive constant . It follows that the covariance
[TABLE]
is a well-defined continuous bilinear operator on . One can then define a continuous symmetric operator , by the identity
[TABLE]
for all . It has finite trace equal to
[TABLE]
Conversely, one can associate to any trace-class symmetric operator , a Gaussian measure on whose covariance , for all . Since is compact, there exists an orthonormal basis of , such that
[TABLE]
for non-negative and non-increasing eigenvalues with . We define a Hilbert space by choosing \big{(}\alpha_{n}e_{n}\big{)} as an orthonormal basis for it. The space is continuously embeded inside . Let stand for a sequence of independent, identically distributed, real-valued Gaussian random variables with zero mean and unit variance, defined on some probability space . Then the series
[TABLE]
converges in , and has distribution .
Fix a positive time horizon . An -Brownian motion in , on the time interval is a random -valued continuous path on , with stationary, independent increments such that the distribution of is a Gaussian probability measure on . A simple construction is provided by taking a sequence of independent, identically distributed, real-valued Brownian motions, and setting
[TABLE]
Denote by the unit sphere of , and let
[TABLE]
stand for the orthogonal projection on , for . The -spherical Brownian motion on is defined as the solution to the Stratonovich stochastic differential equation
[TABLE]
associated to a given initial condition ; it is defined for all times. The speed parameter is a non-negative real number. Write for .
Theorem 2.1**.**
The image under the projection of the measure in the ambiant space is a probability measure on that is invariant for the dynamics of , for any positive speed parameter .
This statement generalizes Proposition 1.1 of [Per18] to the present infinite dimensional setting. The above description of the invariant measure as an image measure under the projection map actually coincides with the finite dimensional description given in the latter reference.
Proof.
When written in Itô form, the stochastic differential equation (1) defining the process reads
[TABLE]
and setting , for any integer , we have
[TABLE]
As in the finite dimensional anisotropic case treated in [Per18], it is actually easier to work with an -valued lift of this -valued process. We introduce for that purpose the process solution of the Stratonovich stochastic differential equation
[TABLE]
equivalently, in Itô form and coordinate-wise, setting as above, we have
[TABLE]
A direct application of Itô’s formula then shows that satisfies the same stochastic differential equation as , for all , so the two -valued processes and have the same distributions. As in the finite dimensional case, one can then check by a direct computation that the measure on is invariant for the processes ; this implies the statement of Theorem 2.1.
Alternatively, one can bypass computations and argue using Malliavin calculus as follows. Denote by the infinitesimal generator of the process . Set for , and let denote the Laplace operator associated with the covariance with weights ,. We then have for any test function and any
[TABLE]
with
[TABLE]
One then has for any test function , with usual notations for the gradient and for the divergence,
[TABLE]
∎
We prove in Section 2.2 that the velocity process converges exponentially fast in Wasserstein distance to the invariant probability measure of Theorem 2.1, for any initial velocity , despite the possible lack of strong Feller property of the associated semigroup. An invariance principle for the time-rescaled position process is obtained as a consequence in Section 2.3. We recall in Section 2.4 what we need from rough paths theory in this work, and prove in Section 2.5 that the canonical rough path associated to the time-rescaled process converges weakly as a rough path to an explicit Stratonovich Brownian rough path.
2.2. Exponential mixing of the velocity process
We consider in this section the mixing properties of the spherical process with unit speed parameter . To simplify the expressions, we drop momentarily the exponents from all our notations. Our objective is to show that the spherical process
[TABLE]
is exponentially mixing. Recall that the and -Wasserstein distances are defined for any probability measures on by the identities
[TABLE]
where the infimum is taken over all couplings of and , and the supremum over all -Lipscthiz functions . The first two equalities are definitions, the last one is the Kantorovich-Rubinstein duality principle. Note that .
Proposition 2.2**.**
Assume that
[TABLE]
There exists a positive time such that for any probability measures and on the unit sphere of , we have
[TABLE]
for all . In particular, the invariant measure is unique, and for any probability measure on the sphere , and , we have
[TABLE]
The role of the trace condition (21) will be clear from the proof. If we have the freedom to choose the covariance of the Brownian noise, this is not a constraint. Note that the rougher the noise, that is the more slowly the sequence of the eigenvalues converges to [math], the easier it is to satisfy condition (21). We shall see in Section 4 that it holds automatically in a number of relevant examples of random dynamics in the configuration space of a fluid flow.
Proof.
Denote by the law of the Brownian motion with covariance , and by the law of the solution of Equation (1) with , starting from . Denote by and the associated expectations operators. Recall that the notation stands for the scalar product of and in . Fix , and consider the two diffusion processes and , started from and , respectively, and solutions of the Itô stochastic differential equations
[TABLE]
Comparing with Equation (2), it is clear that has law and has law . Moreover, Itô’s formula yields
[TABLE]
or equivalently, setting
[TABLE]
we get
[TABLE]
Now remark that since the sequence is non-increasing, we have
[TABLE]
for any . Taking the expectation under in equation (5), we have from Grönwall inequality
[TABLE]
that is
[TABLE]
The conclusion of the statement follows. ∎
Remark that , as a consequence of the symmetry properties of the invariant measure .
Corollary 2.3**.**
For any , we have
[TABLE]
The process is stationary if has distribution ; it can then be extended into a two sided process defined for all real times. Denote by the complete filtration generated by on the probability space where it is defined. Set \mathcal{F}_{\leq 0}:=\sigma\big{(}\mathcal{F}_{t}\,;\,t\leq 0\big{)} and \mathcal{F}_{\geq s}:=\sigma\big{(}\mathcal{F}_{t}\,;\,t\geq s\big{)}, for any real time . Recall that the mixing coefficient of the velocity process is defined, for , by the formula
[TABLE]
The following fact will be useful to get for free the independence of the increments of the limit processes obtained after proper rescalings of functionals of .
Corollary 2.4**.**
The mixing coefficient tends to [math] as increases to .
Proof.
As a preliminary remark, recall the definition of the lift to of , introduced in the proof of Theorem 2.1. This process is strong Feller, as it can be seen to satisfy a Bismut-Li integration by parts formula. See e.g. Peszat and Zabczyk’ seminal paper [PZ95], and Wang and Zhang’s extension [WZ10] to unbounded drift and diffusivity. The velocity process is thus itself a strong Feller diffusion, and if one denotes by its transition semigroup, the functions , for measurable, bounded by , are all Lipschitz continuous, with a finite common upper bound for their Lipschitz constants.
Now, it follows from the Markovian character of the dynamics of , and the Feller property of its semigroup, that it suffices to see that
[TABLE]
tends to [math] as goes to , for any real-valued continuous functions on the unit sphere , with null mean with respect to the invariant measure . Writing further
[TABLE]
for , and using the strong Feller property of the semigroup of the diffusion process , we can further assume that the function in (6) is -Lipschitz continuous. Let stand for its uniform modulus of continuity. For each , denote by a -optimal coupling of the measures and , for a deterministic , so we have
[TABLE]
Using the fact that , one then has
[TABLE]
so the statement follows from Proposition 2.2. ∎
2.3. Invariance principle for the position process
We assume in all of this section that the initial condition of the velocity process of kinetic Brownian motion is distribued according to its invariant probability measure , from Theorem 2.1.
Pick . We prove in this section that the distribution in of the time-rescaled position process converges to the distribution of a Brownian motion in with an explicit covariance, given in identity (7) of Proposition 2.5 below. The usual invariance principles in Hilbert spaces consider weak convergence in , so we need an extra tightness estimate provided in Section 2.3.1 to complete the program. To make the most out of the convergence results from Section 2.2, set
[TABLE]
we have
[TABLE]
with , the spherical Brownian motion run at speed .
Proposition 2.5**.**
For every , the distribution in of the process converges as goes to to the Brownian motion on with covariance operator
[TABLE]
for .
2.3.1. Tightness in Hölder spaces
We dedicate this section to proving the following uniform estimate.
Proposition 2.6**.**
For any , we have
[TABLE]
It follows from Kolmogorov-Lamperti tightness criterion that the laws of form a tight family in , for any . Note that for , we have
[TABLE]
so Proposition 2.6 is a consequence of the estimate
[TABLE]
We translate our problem in discrete time, writing
[TABLE]
to work with the correlations between different integral slices, and compare this sequence to martingale differences. There is an abundant literature on the subject; we follow here the approach of C. Cuny [Cun17].
Let be a probability space with a filtration , where , and let be -valued random variables such that each is measurable with respect to . Recall that is said to be a martingale difference with respect to if each is integrable and \mathbb{E}\big{[}X_{n+1}|\mathcal{F}_{n}\big{]}=0, for all . The following result is an elementary consequence of the Burkholder-Davis-Gundy and Jensen inequalities.
Lemma 2.7**.**
Let be an -valued martingale difference with moments of order . Then
[TABLE]
In particular, if is stationary, then
[TABLE]
Assume from now on that we are given a sequence of integrable -valued random variables on . For , and , define the -algebra
[TABLE]
and set
[TABLE]
(It may not make sense for all , depending on how far in the past the -algebras are defined.) Note that
[TABLE]
so
[TABLE]
is a stationary martingale difference with respect to the filtration \big{(}\mathcal{F}^{(\ell+1)}_{j}\big{)}_{j\geq 0}. We use the classical martingale/co-boundary decomposition to prove the next result.
Lemma 2.8**.**
Fix , and assume that is defined for , then
[TABLE]
In particular, if the sequence is stationary, then
[TABLE]
Proof.
For any , set ; note that . We have for the identity
[TABLE]
By induction we get
[TABLE]
Because is a martingale difference, we know from Lemma 2.7 that
[TABLE]
We also know that
[TABLE]
so we have
[TABLE]
Putting it all together, we obtain
[TABLE]
∎
Proof of Proposition 2.6.
It is enough to prove that we have for any and , the estimate
[TABLE]
Fix the integer such that , and define
[TABLE]
Since we assume that is distributed according to an invariant probability measure, we can actually have our process started for a time arbitrarily far in the past, so we can assume that is well-defined for any . We can then write
[TABLE]
The first sum is a stationary martingale difference with respect to the -algebra ; the second is the subject of the previous lemma. One then has the estimate
[TABLE]
with the notations of Lemma 2.8. In our setting,
[TABLE]
and
[TABLE]
Note that we have from Corollary 2.3
[TABLE]
We can insert this in the upper bound for the integral to obtain
[TABLE]
∎
2.3.2. Convergence in Hölder spaces
We are ready to prove Proposition 2.5 on the weak convergence of in any Hölder space to the Brownian motion in with covariance given by formula (7).
Proof of Proposition 2.5.
From the tightness result in stated in Proposition 2.6, it is sufficient to show that converges weakly in to the above mentionned Brownian motion. If suffices for that purpose to see that for a finite sequence of , and a small enough positive delay , the random variables converge to finitely many independent Gaussian random variables, with corresponding covariances times the covariance (7). One can for instance use Dedecker and Merlevède conditional central limit theorem, from Theorem 1 in [DM03], to see the convergence to a Gaussian limit with the expected covariance operator. One checks that the four conditions (a)-(d) from Theorem 1 in [DM03] hold true in our setting. We denote by a continuous linear form on .
- (a)
We have from the decorrelation result in Corollary 2.3 that
[TABLE]
converges to [math] in as goes to .
- (b)
The decorrelation result in Corollary 2.3 justifies the use of dominated convergence to justify that
[TABLE]
converges in as goes to . The limit is constant, from the ergodic behaviour of the velocity process.
- (c)
The estimate (8) with any shows that the family
[TABLE]
is uniformly integrable.
- (d)
Last we have, by stationarity of the velocity process, that
[TABLE]
converges indeed to a finite limite as goes to . This limit is given by the finite sum , where stands for an orthonormal basis of .
One reads the independence of the limit Gaussian random variables corresponding to different time intervals on their null correlation; the latter is a direct consequence of the decorrelation property of Corollary 2.3. The statement of Proposition 2.5 follows then from the conclusion of Dedecker and Merlevède convergence result. The identification of the covariance (7) is a consequence of the corresponding statement, Proposition 3.4, in the finite dimensional setting of [Per18]. ∎
We aim now at improving the weak invariance principle of Proposition 2.5 into a weak invariance principle for the canonical rough path associated with . This will be crucial in Section 4 when defining kinetic Brownian motion in a diffeomorphism space as the solution of a differential equation driven by , and proving the interpolation results of Theorem 4.3 and Theorem 4.4 by a continuity argument. We recall in the next section all we need to know from rough paths theory.
2.4. The flavor of rough paths theory
It is not our purpose here to give a detailled account of rough paths theory. We refer the reader to the lecture notes [CLL07, FH14, Bau14, Bai15b], for introductions to the subject from different point of views. The following will be sufficient for our needs here.
Rough paths theory is a theory of ordinary differential equations
[TABLE]
controlled by non-smooth signals . The point moves here in , where we are given sufficiently regular vector fields . Young integration theory [You36, Lyo94] allows to make sense of the integral , for paths that are -Hölder, for , as an -valued -Hölder path depending in locally Lipscthiz way on and . This allows to formulate the differential equation (9) as a fixed point problem for a contracting map from into itself, and to obtain as a consequence the continuous dependence of the solution path on the driving control . Lyons-Young theory cannot be used for -Hölder controls with , as even in , with one dimensional controls, there exists no continuous bilinear form on extending the Riemann integral , of smooth paths ; see Propositon 1.29 of [CLL07]. (This can be understood from a Fourier analysis point of view as a consequence of the fact that the resonant operator from Littlewood-Paley theory is unbounded on , when ; see [BCD11].) Lyons’ deep insight was to realize that what really fixes the dynamics of a solution path to the controlled differential equation (9) is not only the increments , or , of the control, but rather the increments of together with the increments of a number of its iterated integrals. This can be understood from the fact that for a smooth control, one has the Taylor-type expansion
[TABLE]
for any real-valued smooth function on . (We use Einstein’ summation convention, with integer indices in .) We consider here the vector fields as first order differential operators, so we have for instance
[TABLE]
The usual first order Euler scheme
[TABLE]
is refined by the above second order Milstein scheme
[TABLE]
whose one step error is given explicitly by the above triple integral, of order , for a control . The iterated integrals
[TABLE]
are however meaningless for a control , when . A -rough path above , with , is exactly the datum of together with a quantity, indexed by , that plays the role of these iterated integrals. Set [0,1]_{\leq}:=\big{\{}(s,t)\in[0,1]^{2}\,;\,s\leq t\big{\}}, and recall that \big{(}\mathbb{R}^{\ell}\big{)}^{\otimes 2} stands for the set of matrices.
Definition 2.9**.**
Fix . A -rough path over , is a map
[TABLE]
such that
[TABLE]
for a path , and satisfies Chen’s relations
[TABLE]
for all . The -Hölder norm on , and the -Hölder norm on , define jointly a complete metric on the nonlinear space of -rough paths.
Chen’s relation accouts for the fact that for a path , one has indeed
[TABLE]
for any , and any indices . One has also in that case, by integration by parts, the identiy
[TABLE]
A -rough path such that the symmetric part of is equal to , for all times , is called weakly geometric. The set of weakly geometric -rough paths is closed in . For a path defined on the time interval , setting and
[TABLE]
for all , defines a weak geometric -rough path, for any , called the canonical rough path associated with . Let stand for an -dimensional Brownian motion. The Stratonovich Brownian rough path is defined by
[TABLE]
It is almost surely a weak geometric -rough path, for any .
Definition 2.10**.**
Let vector fields on be given, together with a weak geometric -rough path over . A path is said to be a solution to the rough differential equation
[TABLE]
if there is an exponent , such that one has
[TABLE]
for any smooth real-valued function on , and any times .
The above term is allowed to depend on . Importantly, the solution of a rough differential equation driven by the Stratonovich Brownian rough path coincides almost surely with the solution of the corresponding Stratonovich differential equation; see e.g. the lecture notes [FH14, Bai].
Theorem 2.11** (Lyons’ universal limit theorem).**
The rough differential equation (10) has a unique solution. It is an element of that depends continuously on .
The map that associates to the driving rough path the solution to a given rough differential equation, seen as an element of , is called the Itô-Lyons solution map. If is a sequence of random geometric -rough path in , converging weakly to a limit random geometric -rough path , the continuity of the Itô-Lyons solution map gives for free the weak convergence in of the laws of the solutions to Equation (10) driven by the , to the law of the solution of that equation driven by .
The theory works perfectly well for dynamics with values in Banach spaces or Banach manifolds, and driving rough paths , with taking values in a Banach space . One needs to take care in that setting to the tensor norm used to define the completion of the algebraic tensor space , as this may produce non-equivalent norms, and that norm is used to define the norm of a rough path. Note that families of vector fields are then replaced in that setting by one forms on with values in the space of vector fields on the space where the dynamics takes place. See e.g. Lyons’ original work [Lyo98] or Cass and Weidner’s work [CW16] for the details. See e.g. [Bai15a] for a simple proof of Lyons’ universal limit theorem in that general setting.
The vector fields in Definition 2.10 and Theorem 2.11 are required to be . This is used to get solution of equation (10) that are defined on the whole time interval . Only local in time existence results can be obtained when working with unbounded vector fields, or on a manifold. The Taylor-like expansion property (11) defining a solution path is then only required to hold for each time , for sufficiently close to . One still has continuity of the solution path with respect to the driving rough path, in an adapted sense. See e.g. Section 2.4.2 of [ABT15]. This continuity property is sufficient to obtain the local weak convergence of the laws of the solution path to the corresponding limit path, for random driving weak geometric -rough paths converging weakly to a limit random weak geometric -rough path. See Definition 4.2 for the definition of local weak convergence.
So far, we have defined kinetic Brownian motion in from its unit velocity process . We have seen in Proposition 2.5 that its time rescaled position process is converging weakly in C^{\alpha}\big{(}[0,1],H\big{)} to a Brownian motion with explicit covariance (7), for any . We prove in the next section that the canonical rough path associated with converges weakly as a weak geometric -rough path to the Stratonovich Brownian rough path associated with the Brownian motion with covariance (7), for any . This convergence result will be instrumental in Section 4 to prove that the Cartan development in diffeomorphism spaces of the time rescaled kinetic Brownian motion in Hilbert spaces of vector fields converge to some limit dynamics as increases to . This will come as a direct consequence of the continuity of the Itô-Lyons solution map.
Remark 2.12**.**
The idea of using rough paths theory for proving elementary homogenization results was first tested in the work [FGL13] of Friz, Gassiat and Lyons, in their study of the so-called physical Brownian motion in a magnetic field. That random process is described as a path in modeling the motion of an object of mass , with momentum , subject to a damping force and a magnetic field. Its momentum satisfies a stochastic differential equation of Ornstein-Uhlenbeck form
[TABLE]
for some matrix , whose eigenvalues all have positive real parts, and is a -dimensional Brownian motion. While the process is easily seen to converge to a Brownian motion , its rough path lift is shown to converge in a rough paths sense in , for any , to a random rough path different from the Stratonovich Brownian rough path associated to .
A number of works have followed this approach to homogenization problems for fast-slow systems; see [ABT15, KM16, KM17, BC17, CFK*+*19] for a sample.
2.5. Rough paths invariance principle for the canonical lift
As in Section 2.3, we assume in all of this section that the initial condition of the velocity process of kinetic Brownian motion is distribued according to its invariant probability measure , from Theorem 2.1.
Let stand for the canonical rough path associated to the random path , where we recall that
[TABLE]
Recall that the tensor space is equipped with its natural complete Hilbert(-Schmidt) norm.
2.5.1. Tightness in rough paths space
Proposition 2.13**.**
For any , we have
[TABLE]
It follows in particular from Proposition 2.6, Lemma 2.13 and the known Kolmogorov-Lamperti criterion for rough paths that the family of laws is tight in , for any .
Proof.
The statement of the lemma is a consequence of the estimate
[TABLE]
for ; we prove the latter. We use for that purpose the same kind of multiscale martingale/coboundary decomposition as in the proof of Lemma 2.8. Let the unique integer such that
[TABLE]
Define
[TABLE]
and
[TABLE]
As above, we can assume without loss of generality that is defined for all , as is assumed to be distributed according to the invariant probability measure of the velocity process. Then the integral rewrites as
[TABLE]
The first sum is a martingale difference with respect to , albeit not stationary,
[TABLE]
Each term is controlled using Lemma 2.6, and the fact that ,
[TABLE]
so the norm of the first sum in (12) is bounded above by , up to a constant depending only on .
The second sum in 12 is treated as in the proof of Lemma 2.8. Set here
[TABLE]
with
[TABLE]
One has
[TABLE]
and we are left with the study of the moments of the . These variables are the conditional expectation of a double integral, which can be decomposed at time as follows.
[TABLE]
Because the conditioning is from a distant past, the first term is controlled using the exponential mixing and the estimate of Lemma 2.6.
[TABLE]
When dealing with the second term, we use the stationarity of to write
[TABLE]
Now we have, for each and ,
[TABLE]
so we eventually have
[TABLE]
This last sum is convergent, so the norm of the second term in (12) is no greater than a constant multiple of . ∎
2.5.2. Convergence in rough path space
We are now ready to state and prove the main result of this section.
Theorem 2.14**.**
Pick . The processes converge in law in , as goes to , to the Stratonovich Brownian rough path with covariance
[TABLE]
Let be a random weak geometric -rough path with distribution an arbitrary limit point of the family of laws of the . Write , with a Brownian motion with the above covariance. Denote by the projection of on the finite dimensional space generated by the first vectors of the basis from Section 2.1 – we use below the associated coordinate system. Using a monotone class argument and the tightness result stated in Lemma 2.13, the statement of Theorem 2.14 is a consequence of the following result, given that is arbitrary.
Lemma 2.15**.**
The -dimensional random rough path is a Stratonovich Brownian rough path with associated covariance matrix , with
[TABLE]
Proof.
Let stand for the step- nilpotent Lie group over . We prove that the process is a -valued Brownian motion by showing that it has stationary, independent, increments. The stationarity is inherited from the stationarity of the . The independence of the increments of on disjoint closed intervals is a consequence of Corollary 2.4 on the convergence to [math] of the mixing coefficient of . Continuity of allows to extend the result to adjacent time intervals.
We identify the generator of the -valued Brownian motion as the generator of the -dimensional Stratonovich Brownian rough path following the method of [Per18]. We recall the details for the reader’s convenience. Note that we only need to consider the joint dynamics of and the antisymmetric part of ; the former takes values in the Lie algebra of – a linear space. Denote by the antisymmetric part of Stratonovich Brownian rough path associated with . We then have, for any smooth real-valued function on with compact support, the identity
[TABLE]
The conclusion follows by multiplying by and taking expectation, sending to [math], after recalling that and are centered, and recalling the uniform estimates from Proposition 2.13 under the form
[TABLE]
∎
3. Geometry of the configuration space
3.1. Configuration space
Let be a -dimensional connected and oriented Riemannian manifold, and a finite dimensional fiber bundle over , with vertical bundle . Think of the trivial bundles , or , as typical examples. We collect from Palais’ seminal work [Pal68] elementary results on the Hilbert manifold of sections of with Sobolev regularity exponent .
- (1)
Sobolev embedings hold true, with in particular , if and . 2. (2)
Variations of -sections of . The spaces and are isomorphic as Hilbert manifolds. This isomorphism accounts for the fact that an infinitesimal perturbation of a section of , reads as a collection of vertical tangent vectors , indexed by . As a particular example, for any finite dimensional manifold , the spaces and are isomorphic. 3. (3)
For any two finite dimensional fiber bundles above , the map
[TABLE]
is an isomorphism between and . 4. (4)
Omega lemma. Given a smooth fiber bundle morphism , above , set
[TABLE]
for any section of . Then sends in , and is isomorphic to , via the isomorphisms and .
For , set
[TABLE]
this will be the configuration space of our dynamics. Choosing , ensures that , by Sobolev embedings. The tangent space to this Hilbert manifold is given by
[TABLE]
from item 2 above. If , elements of are maps from into itself. Recall in that case from Section 4 of [EM69] that the subset of of maps from into itself that preserve the volume form by pull-back is then a closed submanifold of , and that elements of are diffeomorphisms. So is a group. We shall always assume implicitly these constraints on the regularity exponent , when talking about or . We recall other elementary facts on at the end of this section.
To implement a version of Cartan’s development machinery in the weak Riemannian setting of the next section, we introduce the following finite dimensional fiber bundles above , seen below as the first component. Given , denote by the set of isometries from to . Set
[TABLE]
We understand as the set of maps from into , so T\mathscr{M}\simeq H^{s}\big{(}F^{(v)}\big{)}. We denote by \big{(}\varphi(\cdot),v(\cdot)\big{)} a generic element of . We have similar interpretations of the other spaces over the corresponding bundles, with similar notations. Since the map
[TABLE]
is a smooth bundle morphism, it follows from items 3 and 4 above, that it induces a smooth map from into . Similarly, the smooth map
[TABLE]
induces a smooth map from into .
We refer the reader to the classic textbook [Ros97] for the following elementary facts from functional analysis about the Laplace operator on vector fields on . We take the convention that is a non-positive symmetric operator on . This operator has compact resolvant, so one has an eigenspaces decomposition
[TABLE]
with finite dimensional eigenspaces , with corresponding non-positive eigenvalues . Eigenvectors of are smooth, from elliptic regularity results. We recover the space described above setting
[TABLE]
The [math]-eigenspace is finite dimensional. Any choice of Euclidean norm on it defines the topology of , associated with the norm
[TABLE]
3.2. Weak Riemannian structure on the configuration space
Denote by Vol the Riemannian volume measure on , and by , its exponential map. The configuration space is endowed with a smooth weak Riemannian structure, setting for any and ,
[TABLE]
This formula defines by restriction a weak Riemannian metric on the space of maps from into itself preserving the volume form. In that setting, notice that if and , for some vector fields on , then the change of variable formula gives
[TABLE]
so the scalar product is in that case the scalar product of the vector fields X and Y. The fact that the topology on induced by the scalar product is weaker than the -topology makes non-obvious the existence of a smooth Levi-Civita connection. Ebin and Marsden have proved that
- •
the metric (14) is a smooth function on ,
- •
it has a smooth Levi-Civita connection , with associated exponential map Exp well-defined and smooth in a neighbourhood of the zero section; it is explicitly given by
[TABLE]
The geodesics of are defined for all times. Denote by the Levi-Civita connection of . For smooth right invariant vector fields on , with and , one has
[TABLE]
The -scalar product is right invariant on the group , from the change of variable formula. The Levi-Civita connection of the metric on the volume preserving configuration space is explicitly given in terms of the Hodge projection operator on divergence-free vector fields on . Denote by the right composition by . For any , the map
[TABLE]
is indeed the orthogonal projection map from into , and its depends smoothly on . So the Levi-Civita connection on is given by
[TABLE]
it is a smooth map. Its associated exponential map is no longer given by the exponential map on , due to the non-local volume preserving constraint. Geodesics are not defined for all times anymore. Denote by Id the identity map on . For smooth right invariant vector fields on , with and , for vector fields on , one has
[TABLE]
V.I. Arnol’d showed formally in his seminal work [Arn66] that the velocity field of a geodesic in , with , is a solution to Euler’s equation for the hydrodynamics of an incompressible fluid. Ebin and Marsden gave an analytical proof of that fact in their seminal work [EM69]. (Besides that classical reference, we refere the reader to Arnold and Khesin’s book [AK98], or Smolentsev’s thourough review [Smo07] for reference works on the weak Riemannian geometry of the configuration space.)
The flat two-dimensional torus offers an interesting concrete example. Its symplectic structure allows to identify a Hilbert basis of from an eigenbasis for the Laplace operator on real-valued functions on ; see e.g. Arnold and Khesin’s book [AK98], Section 7 of Chap. 1. Denote by the constant vector fields in the coordinate directions, and . One has
[TABLE]
One can see in the following simulations the image of axis circles by the time map of the associated flow in , corresponding to different inital conditions for , with . The simulations were done using an elementary finite dimensional approximation for the dynamics, using the explicit expressions for the Christoffel symbols first given by Arnold in [Arn66].
We come back to this point in Section 3.4.
3.3. Parallel transport
We recast in this section the parallel transport operations in and , using the bundles from Section 3.1. This allows to set the notations for the next section on Cartan development operation in and . Recall stands for sections from into the corresponding bundle . We denote by the vertical space in , for the canonical projection map . Recall also that is simply the set of vector fields on .
Denote by , the connector associated with the Levi-Civita connection on . So, for a path in , one has
[TABLE]
and
[TABLE]
for any smooth vector fields on . The second order tangent bundle of identifies with . The connector associated with the -Levi-Civita connection is given, for a section of over an element of , by
[TABLE]
Denote by the vertical space in for the canonical projection map
[TABLE]
One defines a smooth one form on , with values in , by requiring that iff
[TABLE]
We choose the letter , for this horizontal lift of the connection. In simple terms, for any fixed , the linear map identifies the space to the horizontal subspace of , via the usual horizontal lift. Note that the definition of does not depend on the base point , for a generic element and .
Denote also by the smooth one form on with values in the space of vector field on , such that for any path in , and any vector , the vector is transported parallely along the -valued path iff
[TABLE]
Here again, the base point is not involved in the definition of the tangent vector , for a generic element and . Pick
[TABLE]
and note that for any vertical vector
[TABLE]
and , one has
[TABLE]
iff
[TABLE]
for any , with defined naturally. It follows from the Omega Lemma that one defines a smooth vector field on , setting
[TABLE]
(Note that while is a one form with values in vector fields, is indeed a vector field.) Similarly, we define a smooth one-form on with values in vector fields on , setting
[TABLE]
Proposition 3.1**.**
Given a path \big{(}\varphi_{t}(\cdot);e_{t}(\cdot),v_{t}(\cdot)\big{)}_{0\leq t\leq 1} in , one has pointwise
[TABLE]
for all , iff
[TABLE]
for every .
The next two propositions give a description of parallel transport in and , respectively, in terms of the vector field on .
Proposition 3.2**.**
Let \big{(}\varphi_{t}(\cdot),v_{t}(\cdot)\big{)}_{0\leq t\leq 1} be a -valued path. Then
[TABLE]
iff
[TABLE]
Proof.
Given , the following map identifies with the vertical subspace of
[TABLE]
For any and u\in T_{(y,v)}\big{(}F^{(v)}_{x}\big{)}, one then has
[TABLE]
For an -valued path \big{(}\varphi_{t}(\cdot),v_{t}(\cdot)\big{)}, one then has the splitting
[TABLE]
The result follows because composition by is one-to-one. ∎
Recall that stands for Hodge projector on divergence-free vector fields.
Proposition 3.3**.**
Let \big{(}\varphi_{t}(\cdot),v_{t}(\cdot)\big{)}_{0\leq t\leq 1} be a -valued path. Then
[TABLE]
iff
[TABLE]
Proof.
Write for the section of above , and write , for the projection on the orthogonal in of . Note that the differential of identifies to in the fibers, since it is linear. The identification is up to an isomorphism which is exactly the composition by , in the sense that
[TABLE]
for any . As we work with a -valued path , one has , at all times, so differentiating this identity with respect to gives
[TABLE]
Since , we can conclude with the decomposition (16), by rewriting the expression for the time derivative under the form
[TABLE]
3.4. Cartan and Lie developments
Cartan’s moving frame method [Car01] provides a mechanics for constructing paths on from path on , giving something of a chart on pathspace in . Its description requires the introduction of the orthonormal frame bundle over . It is made up of pairs , with and an isometry from to . It has a natural finite dimensional manifold structure, and the Riemannian connection on induces vector fields on by parallel transport of a frame in the direction of its direction along the corresponding path in .
The development in of a path in is the natural projection in of the -valued path solution to the equation
[TABLE]
Explosion may happen before time . This path in depends not only on but also on . Conversely, given any path in and above , parallel transport of along the path defines a path in , and setting , defines a path in whose Cartan development is . Geodesics are Cartan’s development of straight lines in .
We recast the definition of Cartan development given above in a finite dimensional setting in the following form well suited for the present infinite dimensional setting.
Definition 3.4**.**
Let a path in be given. An -valued path is the Cartan development of if there exists a family
[TABLE]
of bounded linear maps, with , such that
[TABLE]
at all times where is well-defined.
This definition conveys the same picture as above. The map , named ‘frame’, is transported parallely along the path , while is given by the image by of . The existence of a unique Cartan development for a path in is elementary in that case. It follows from Proposition 3.2 that equation (LABEL:EqCartanM) is equivalent to requiring that the H^{s}\big{(}F^{(e)}\big{)}-valued path satisfies the equation
[TABLE]
Since the one-form is smooth, this equation has a unique solution until its possibly finite explosion time.
Here is now the form of Cartan development dynamics in . Recall is the set of divergence-free vector fields on .
Definition 3.5**.**
Let a path in be given. An -valued path is the Cartan development of if there exists a family
[TABLE]
of bounded linear maps, with , such that
[TABLE]
at all times where is well-defined.
The proof of existence of a unique solution to Cartan’s development system (19) in is not fundamentally different from the case of , and uses Proposition 3.3 instead of Proposition 3.2. It is however more technical, and full details are given in Appendix A. The system is recast as a controlled ordinary differential equation in the state space
[TABLE]
with generic element \big{(}(\varphi,e),f\big{)}, and dynamics of the form
[TABLE]
driven by a smooth vector field-valued one form on . We use Cartan’s development map in the configuration manifolds and in the next section. We conclude this section by a brief comparison between Cartan development and the Lie group notion of development, commonly used to define the stochastic Euler equation.
Let stand for a finite dimensional Lie group with Lie algebra . Lie’s development operation provides another way of constructing paths
[TABLE]
with values in from paths in , by identifying and via a linear map , and solving the ordinary differential equation
[TABLE]
In such a group setting, Malliavin and Airault [AM02] gave a correspondance between the Cartan and Lie notions of development, although this was certainly known to practitioners before; see also [CFM07]. Choose an orthonormal basis of the Lie algebra of , and denote by the structure constants, so the Christoffel symbols are given by \Gamma_{k,\ell}^{n}=\frac{1}{2}\,\big{(}c_{k,\ell}^{n}-c_{\ell,n}^{k}+c_{n,k}^{\ell}\big{)}. Write for the antisymmetric endomorphism with matrix in the chosen basis, for , and consider as a linear map from into the set of antisymmetric endomorphism of the Lie algebra. Denote by the orthonormal group of .
Proposition 3.6**.**
Let be a path in the Lie algebra of . The path solution to the \big{(}O\textsc{Lie}(G)\times G\big{)}-valued equation
[TABLE]
is the Cartan development of the path .
(The system (20) is reminiscent of the equation in
[TABLE]
from Appendix A, recasting Cartan’s development dynamics in .) The geodesic started from the identity of , with direction , is in particular given in the Lie picture as the solution to the equation
[TABLE]
Note that \exp\big{(}t\Gamma(\omega)\big{)}(\omega)\in\textsc{Lie}(G). Note also that it is the fact that the Christoffel symbols are constants that allows to reduce the second order differential equation for the geodesics on a generic Riemannian manifold into a first order differential equation, in a Riemannian Lie group setting.
Following Euler’s picture, it is this group-oriented point of view that has been considered so far in the geometric viewpoint on fluid hydrodynamics, deterministic or stochastic. The naive implementation of Cartan’s machinery in terms of Lie development runs into trouble in the infinite dimensional setting of or . This can be seen on the example of the two dimensional torus and the volume preserving diffeomorphism group as a consequence of the fact that Christoffel symbols define antisymmetric unbounded operators that have no good exponential in the orthonormal group of . The problem comes from the fact that of have a fixed regularity. See Malliavin’s works [Mal99, CFM07] for a quantification of the loss of regularity of Brownian motion in the set of homeomorphisms of the circle, as time increases. The Lie development picture of Cartan’s development map can however be used for numerical purposes for simulating kinetic Brownian motion in . It corresponds to having a Brownian motion on the unit sphere of the space of divergence-free vector fields on ; see Section 4.
4. Kinetic Brownian motion on the diffeomorphism group
Pick , or , depending on whether we work on or .
4.1. Kinetic Brownian motion in
Set . Pick another exponent , and let stand for the -orthogonal of in , with norm
[TABLE]
inherited from the eigenspace decomposition (13) of . Let stand for the continuous inclusion of into . The continuous symmetric operator , is trace-class, as a consequence of Weyl’s law on a closed manifold, so it is the covariance of an -valued Brownian motion . Note the correspondance , and
[TABLE]
with the notations of Section 2.1. We assume that the trace condition
[TABLE]
holds true. Note that the faster goes to , the lesser there is noise in . The extreme case corresponds to only finitely many non-null . On the other extreme, the bigger the multiplicity of is, the more noise there is in . The trace condition (21) holds automatically as soon as has multiplicity three.
The Brownian motion on the sphere of , associated with the injection , is defined as the solution to the stochastic differential equation
[TABLE]
where , is the orthogonal projection on , for any , and the position process of kinetic Brownian motion \big{(}x^{\sigma}_{t},v^{\sigma}_{t}\big{)} in , given as its integral
[TABLE]
Kinetic Brownian motion on is then defined as Cartan development in of the time rescaled kinetic Brownian motion \big{(}x^{\sigma}_{\sigma^{2}t}\big{)} in .
Definition 4.1**.**
Kinetic Brownian motion on is the projection on the configuration space of the solution \big{(}\varphi^{\sigma}_{t},e^{\sigma}_{t}\big{)} to the equation in
[TABLE]
with initial condition and e_{0}=\textrm{Id}\in{\sf L}\big{(}H^{s}(TM)\big{)}.
This equation is only locally well-posed. We introduce the following definition to deal with weak convergence questions for possibly exploding solutions of random or stochastic differential equations. Add a cemetary point to , and endow the disjoint union with its natural topology. Denote by the set of continuous paths , that start from a reference point above the identity map on , and that stay at the cemetery point , if it leaves . Let where stands for the filtration generated by the canonical coordinate process on pathspace. Let stand for the balls with center and radius , for any . The first exit time from is denoted by , and used to define a measurable map
[TABLE]
which associates to any path the path which coincides with on the time interval \big{[}0,\tau_{R}\big{]}, and which is constant, equal to , on the time interval \big{[}\tau_{R},1\big{]}. The following definition then provides a convenient setting for dealing with sequences of random process whose limit may explode.
Definition 4.2**.**
A sequence of probability measures on \big{(}\Omega_{0},\mathcal{F}\big{)} is said to converge locally weakly to some limit probability if the sequence of probability measures on converges weakly to , for every .
We proved in Theorem 2.14 that the canonical rough path lift of \big{(}x^{\sigma}_{\sigma^{2}t}\big{)}_{0\leq t\leq 1}, converges weakly in the space of weak geometric -rough paths in , to the Stratonovich Brownian rough path , with covariance operator
[TABLE]
Since one can rewrite Equation (22) as a rough differential equation driven by the rough path
[TABLE]
the continuity of the Itô-Lyons solution map gives the following theorem. Recall that the solution of a rough differential equation driven by the Stratonovich Brownian rough path coincides almost surely with the solution of the corresponding Stratonovich differential equation.
Theorem 4.3**.**
The -valued part of kinetic Brownian motion is converging locally weakly to the projection on of the -valued Brownian motion solution to the stochastic differential equation
[TABLE]
The motion of itself is not given as the solution of a stochastic differential equation. This happens already in finite dimension, when defining anisotropic Brownian motion on a -dimensional Riemannian manifold as Cartan development of an anisotropic Brownian motion in . One needs the moving orthonormal frame attached to the running point on , to define the position increment in from the increment of the driving anisotropic Brownian motion in . The motion in is in particular non-Markovian, while the motion in is Markovian. The same phenomenon happens in the present infinite dimensional setting, and we do not get here classical semimartingale flows in [Kun90], or Brownian flows in critical spaces, such as in Malliavin’s work on the canonical Brownian motion on the diffeomorphism group of the circle [Mal99, Fan02, AR02].
We remark here that the stochastic homogenization methods that X.-M. Li used in [Li16] to prove the homogenization result for kinetic Brownian motion in a finite dimensional, complete, Riemannian manifold, require a positive injectivity radius and a uniform control on the gradient of the distance function over the whole manifold. It is unclear that anything like that is available in the present infinite dimensional setting, or in the setting of volume-preserving diffeomorphisms investigated in the next section, especially given the fact that or have infinite negative curvature in some directions. The robust pathwise approach of rough paths allows to circumvent these potential issues.
4.2. Kinetic Brownian motion in
Let stand for the closed subspace of of divergence-free vector fields on the fluid domain . It is the tangent space at the identity map of the closed submanifold of of diffeomorphisms that leave invariant the Riemannian volume form of . The intersection of with , is continuously embedded into . If stands for this injection, the continuous symmetric operator , is trace-class, so it is the covariance of an -valued Brownian motion . The spectrum of is explicit in the example of the -dimensional torus, with maximal eigenvalue , with multiplicity . The trace condition (21) thus holds true for any , in that case. Similarly, the spectrum of the Laplacian operator on vector fields on the -dimensional sphere is obtained from the spectrum of the Laplacian operator on real-valued functions on the -sphere, as a consequence of its canonical symplectic structure [AS89, Yos97]. Eigenvectors are constant multiples of the complex spherical harmonics, so eigenvalues have multiplicity at least two. Here as well, symmetry properties of the -dimensional sphere imply that they have actually multiplicity four, so the trace condition (21) holds for free. More generally, divergence-free vector fields on a simply connected -dimensional manifold are gradients of functions, so one gets the spectrum of the covariance operator from the spectrum of the Laplacian operator on real-valued functions on . One needs to assume the trace condition (21) in this generality.
Kinetic Brownian motion in is defined as above from the associated Brownian motion on the sphere of , and its integral. We prove in Theorem A.3 of Appendix A that the Cartan development in , of the time rescaled kinetic Brownian motion in is the -part of the solution , to a controlled ordinary differential equation on
[TABLE]
driven by a smooth vector field
[TABLE]
Here again, one can rewrite that equation as a rough differential equation driven by the canonical rough path above the time rescalled position process of kinetic Brownian motion in . The continuity of the Itô-Lyons solution map then gives the following theorem.
Theorem 4.4**.**
The -valued part of kinetic Brownian motion in is converging locally weakly to the projection on of a -valued Brownian motion.
Here again, the dynamics of is non-Markovian. Note that since kinetic Brownian motion on is defined by Cartan development, using the metric (14), the -size of is equal to the -norm of . The metric being right invariant on the group , the Eulerian velocity
[TABLE]
also has the same -norm as . The latter is not preserved a priori; neither is the -norm of , as mentioned above after Proposition 3.6.
Denote by the quadratic form on , with matrix
[TABLE]
in the orthonormal basis of associated with the eigenvector decomposition (13) for on . For each in the unit sphere of , one has , and
[TABLE]
Since the -valued diffusion is ergodic, each component of , in the decomposition (13), is an ergodic process in the interval \big{(}-\lambda_{n}^{-s/2},\lambda_{n}^{-s/2}\big{)}. The squared -norm of is also an ergodic process in the interval . It has invariant measure the image of a constant multiple of the measure with density with respect to the Gaussian measure in with covariance , by the map
[TABLE]
from Proposition 2.1. This is the invariant measure of the squared -norm of the Eulerian velocity process . We emphasize that this invariant measure is independent of the interpolation parameter . We record part of these facts in the following statement.
Corollary 4.5**.**
Fix . The -norm of the velocity field of kinetic Brownian motion is an ergodic process taking values in the interval , with invariant probability measure the image of a constant multiple of the measure with density with respect to the Gaussian measure in with covariance , by the map
[TABLE]
It is desirable to study the homogenization problem for other intrinsically randomly perturbated partial differential equations of geometric nature, such as the KdV, (modified) Camassa-Holm equations, or equations with non-local inertia operator, such as the modified Constantin-Lax-Majda equation [Kol17]. The core technical problem, from the geometric/analytic point of view, is the definition of Cartan development map as the solution map of an ordinary differential equation driven by sufficiently regular vector fields on the configuration space. We took advantage, in the present setting, of the ‘pointwise’ character of the associated geometric objects to recast things in terms of the bundles of Section 3.1. One may have to proceed differently for other weak metrics. We expect the homogenization results proved in Theorem 4.3 and Theorem 4.4 to have analogues in the setting of the strong, complete, Riemannian metrics of [BV20]. Global in time existence results for kinetic Brownian motion and its limit Brownian motion are expected. We leave these questions for a forthcoming work.
We worked here in the Sobolev setting to make things easier and concentrate on the probabilistic problems, and the implementation of the rough path approach in this infinite dimensional setting. It is a natural question to ask whether one can run the analysis in the Fréchet setting of smooth diffeomorphisms of , asking for preservation of the regularity of the initial condition and velocity, as in Ebin-Marsden seminal work – Section 12 in [EM69], under proper assumptions on the noise.
Appendix A Cartan development in
We prove in this Appendix that Cartan’s development system (19) on can be recast as an ordinary differential equation in H^{s}\big{(}F^{(e)}\big{)}\times{\sf L}\big{(}H^{s}(TM)\big{)}, driven by a smooth vector field. It has, as a consequence, a unique solution, up to a possibly finite explosion time.
Let , stand for a smooth vector bundle morphism that coincides with the Hodge projector from (15) on . The existence of such a map follows from the following elementary partition of unity result.
Proposition A.1**.**
Let be an open cover of . Then there exists a smooth partition of unity subordinated to .
Set
[TABLE]
The letter stands for a generic element of , and
[TABLE]
We give the details of the following elementary result.
Lemma A.2**.**
The map is well-defined and smooth.
Proof.
It is enough to prove that the map
[TABLE]
is smooth. Since the map
[TABLE]
is smooth, the problem reduces to the following question. Let a Banach manifold and a Hilbert space , be given together with a smooth map , that is linear with respect to its second argument. Denote by and generic elements of . Prove that the curryfication is well-defined and smooth.
Write for the differential operator. We show that . This will be enough, since we can then bootstrap the construction to show that , is differentiable for any . Because the result is local, we can assume without loss of generality that an open set of a Banach space. Fix , and let be a convex neighbourhood of in , such that . Then for all and , one has
[TABLE]
The conclusion follows from the fact that we have in particular the estimate
[TABLE]
for a positive constant independent of . ∎
Choose now a path with values in , and zero initial condition. Let \big{(}(\varphi_{t},e_{t}),f_{t}) be the solution in H^{s}(F^{(e)})\times{\sf L}\big{(}H^{s}(TM)\big{)} of the equation
[TABLE]
with initial condition , and . Since the vector field is smooth, equation (23) is locally well-posed, possibly up to a finite explosion time .
Theorem A.3**.**
The path takes values in , and coincides with the Cartan development of . We further have \dot{\varphi}_{t}=e_{t}\big{(}f_{t}(\dot{\bf X}_{t})\big{)}, so the dynamics (23) does not depend on the extension of the Hodge projector used in the definition of .
Proof.
Let , be a fixed divergence-free vector field on . We need to show that
[TABLE]
on the whole time interval . From Proposition 3.3, this is equivalent to showing that we have
[TABLE]
Look at the function
[TABLE]
from to , and set
[TABLE]
We have
[TABLE]
We prove that is divergence-free. Define for that purpose the subset of times such that is divergence-free for all , and preserves the volume form. It is a non-empty closed subset of . Fix . It suffices to prove that is in the interior of for a well-chosen extension of , possibly different from . We choose for any smooth extension of defined on a neighbourhood of , such that . Set , so for a fixed , the quantity
[TABLE]
satisfies the equation
[TABLE]
This differential equation satisfies the classical Picard-Lindelöf assumptions, so it has a unique solution with given initial condition. Since and the constant zero vector field is a solution to the equation, is identically zero, and is divergence-free.
This holds true for any , in a time interval independent of . It follows in particular that \dot{\varphi}_{t}=e_{t}\big{(}f_{t}(\dot{\bf X}_{t})\big{)} is locally divergence-free, and preserves the volume form, in a neighbourhood of the time . The interval is thus both closed and open, so . The statement of Theorem A.3 follows, since P\big{(}e_{t}(f_{t}({\bf Y}))\big{)}=e_{t}\big{(}f_{t}(\bf Y)\big{)}, so we get
[TABLE]
using Proposition 3.1 in the last equality. ∎
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[ABT 15] J. Angst, I. Bailleul, and C. Tardif. Kinetic brownian motion on Riemannian manifolds. Elec. J. Probab. , 20(110):1–40, 2015.
- 2[AF 07] J. Angst and J. Franchi. A central limit theorem for a class of relativistic diffusions. J. Math. Phys. , 48(3):083101, 2007.
- 3[AHK 12] S. Albeverio, A. Hilbert, and V.N. Kolokoltsov. Uniform asymptotic bounds for the heat kernel and the trace of a stochastic geodesic flow. Stochastics , 84(2-3):315–333, 2012.
- 4[AK 98] V.I. Arnold and B.A. Khesin. Topological methods in hydrodynamics , volume 125 of Applied Mathematical Sciences . Springer, 1998.
- 5[AM 02] H. Airault and P. Malliavin. Quasi-invariance of Brownian measures on the group of circle homeomorphisms and infinite-dimensional Riemannian geometry. J. Funct. Anal. , 196:395–446, 2002.
- 6[AR 02] H. Airault and J. Ren. Modulus of continuity of the canonic Brownian ”on the group of diffeomorphisms of the circle”. J. Funct. Anal. , 196:395–446, 2002.
- 7[Arn 66] V.I. Arnold. Sur la géométrie différentielle des groupes de Lie de dimension infinie et ses application à l’hydrodynamique des fluides parfaits. Ann. Inst. Fourier , 16(1):319–361, 1966.
- 8[AS 89] T.A. Arakelyan and G.K. Savvidy. Geometry of a group of area-preserving diffeomorphisms. Physics Letters B , 223(1), 1989.