Anytime Multi-arm Task and Motion Planning for Pick-and-Place of Individual Objects via Handoffs
Rahul Shome, Kostas E. Bekris

TL;DR
This paper introduces a novel multi-modal extension of the dRRT* algorithm for multi-arm pick-and-place tasks involving handoffs, achieving efficient, asymptotically optimal solutions that scale with more robots.
Contribution
It proposes a new multi-modal planning algorithm that directly explores the combined space of multi-arm tasks, improving efficiency and scalability over existing methods.
Findings
Fast initial solution generation
Improved solution quality over time
Effective scaling with more robots
Abstract
Automation applications are pushing the deployment of many high DoF manipulators in warehouse and manufacturing environments. This has motivated many efforts on optimizing manipulation tasks involving a single arm. Coordinating multiple arms for manipulation, however, introduces additional computational challenges arising from the increased DoFs, as well as the combinatorial increase in the available operations that many manipulators can perform, including handoffs between arms. The focus here is on the case of pick-and-place tasks, which require a sequence of handoffs to be executed, so as to achieve computational efficiency, asymptotic optimality and practical anytime performance. The paper leverages recent advances in multi-robot motion planning for high DoF systems to propose a novel multi-modal extension of the dRRT* algorithm. The key insight is that, instead of naively solving a…
Click any figure to enlarge with its caption.
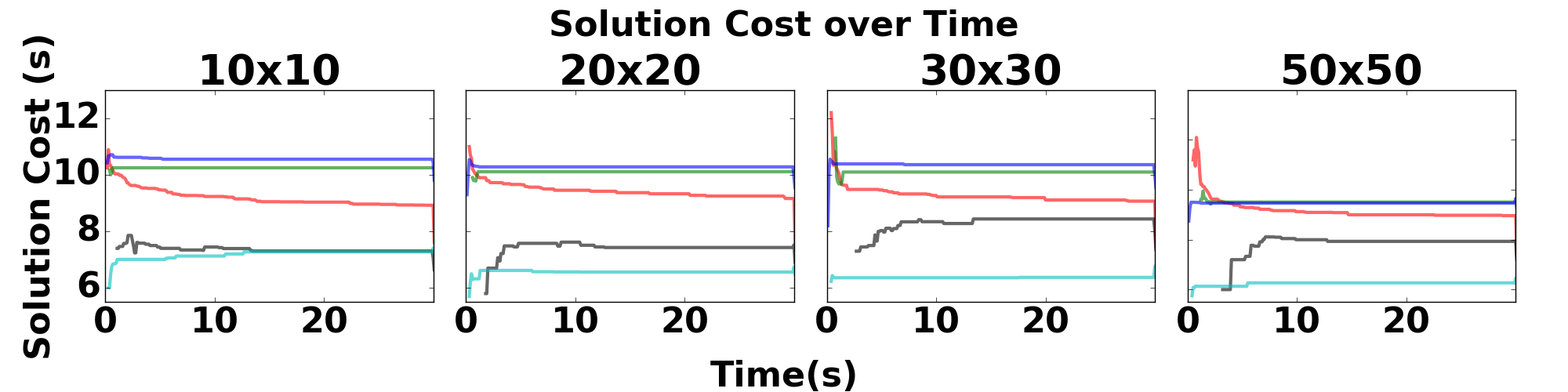 Figure 1
Figure 1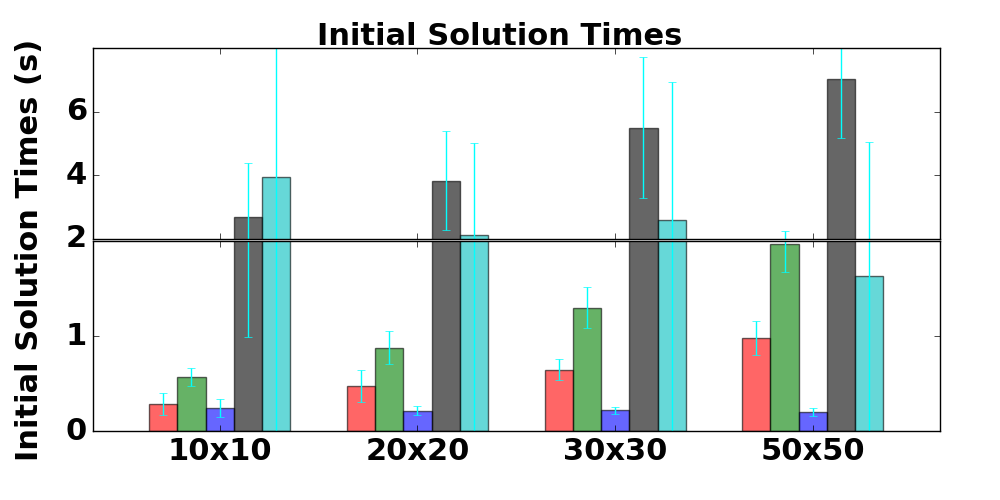 Figure 2
Figure 2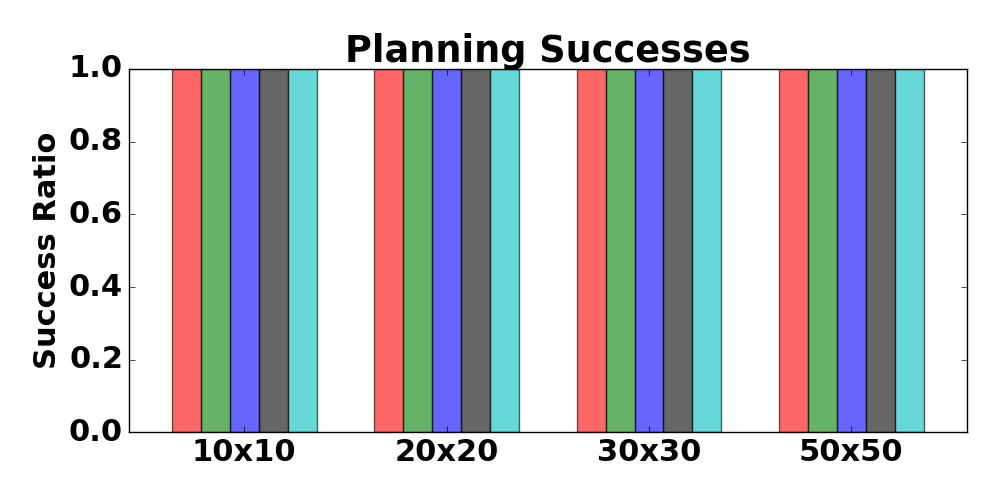 Figure 3
Figure 3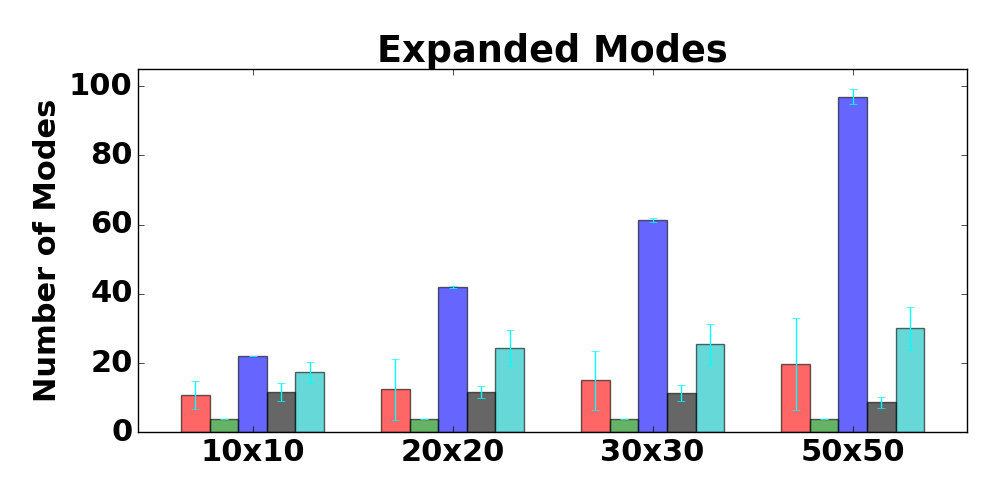 Figure 4
Figure 4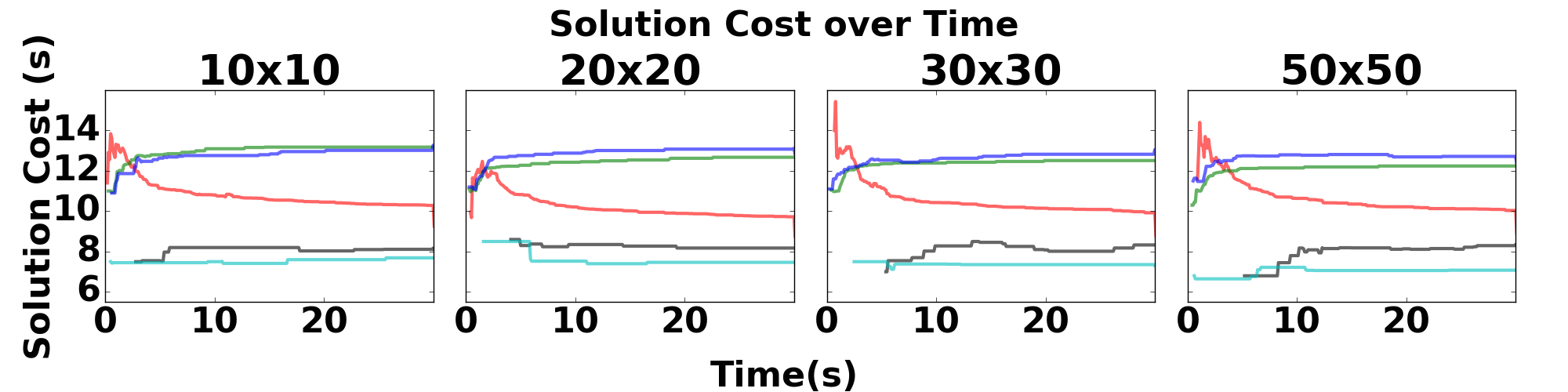 Figure 5
Figure 5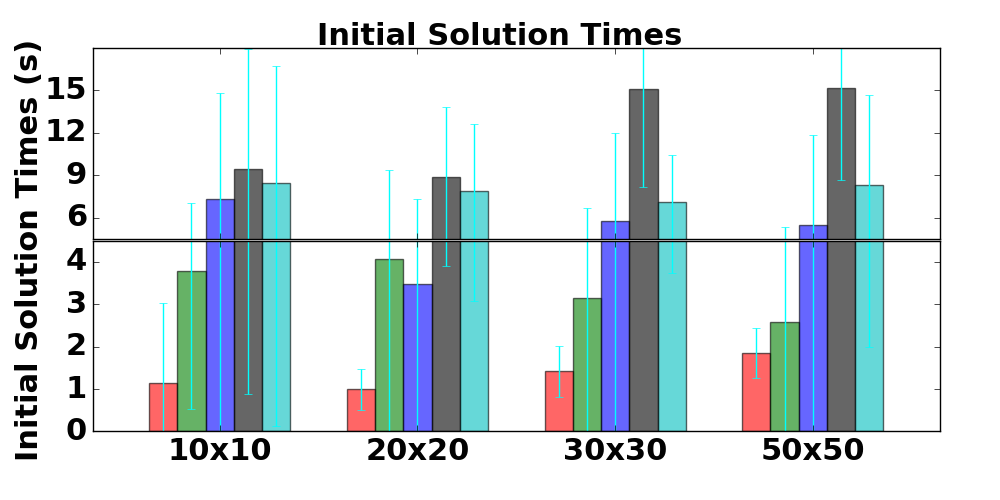 Figure 6
Figure 6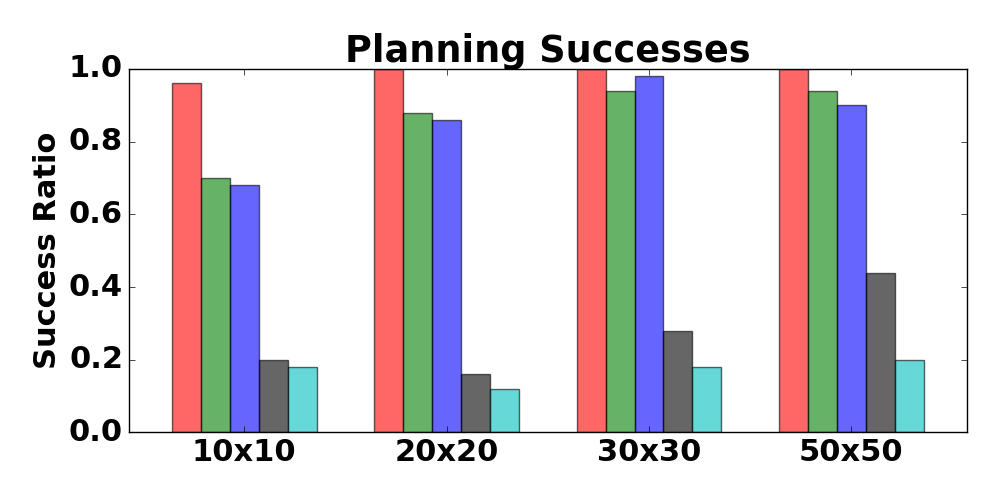 Figure 7
Figure 7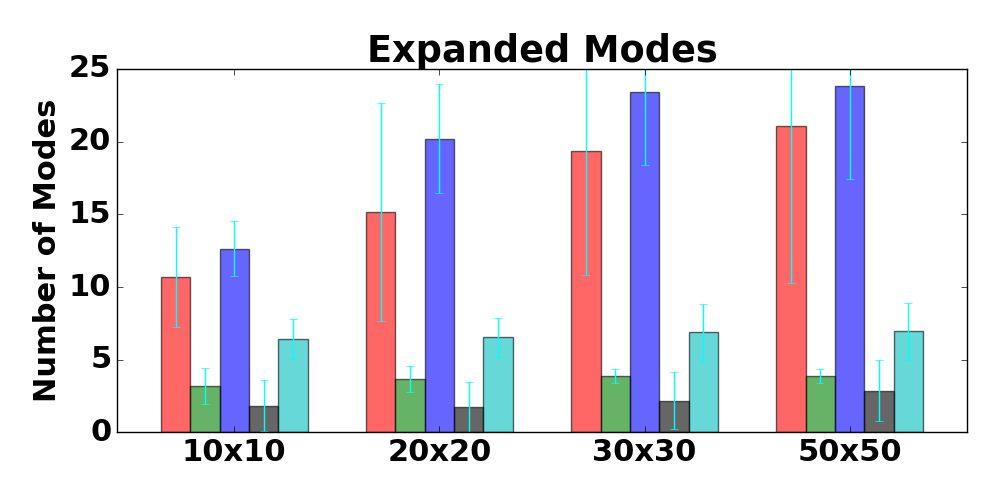 Figure 8
Figure 8 Figure 9
Figure 9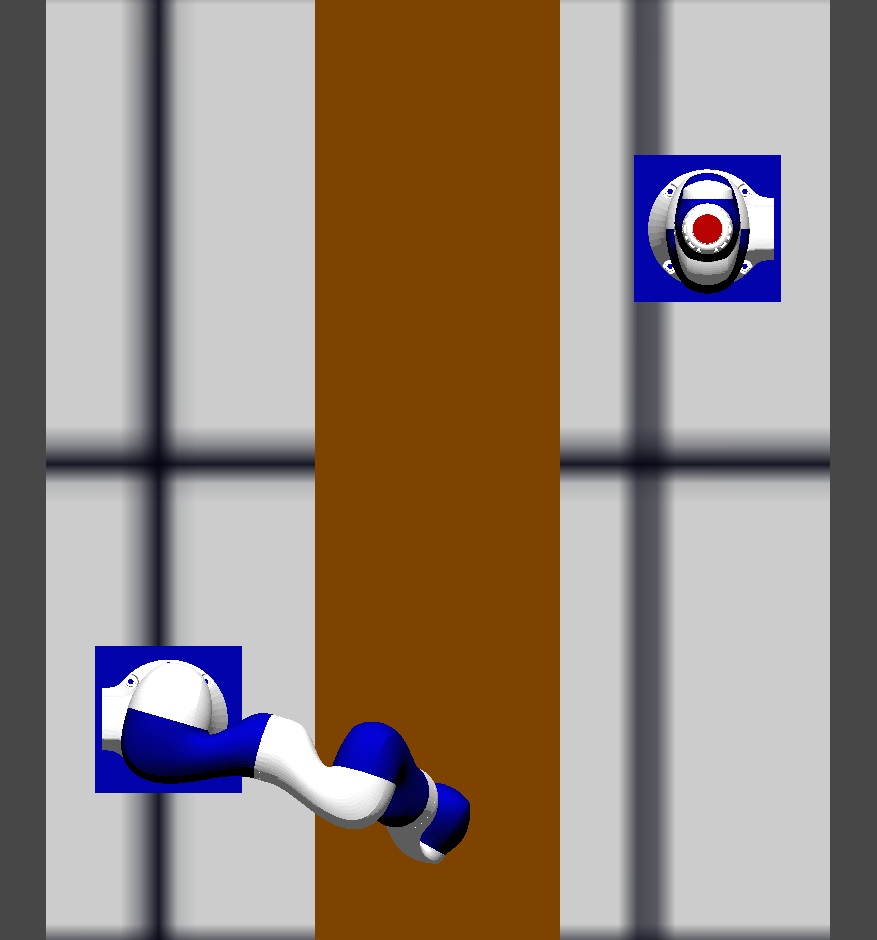 Figure 10
Figure 10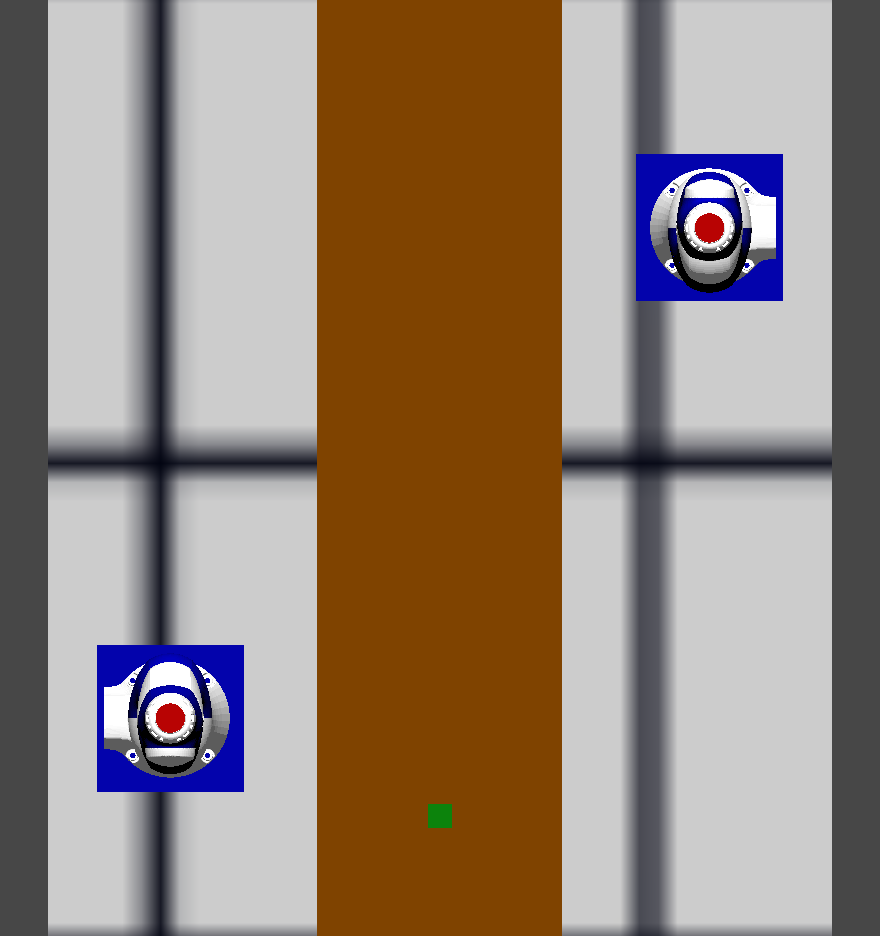 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13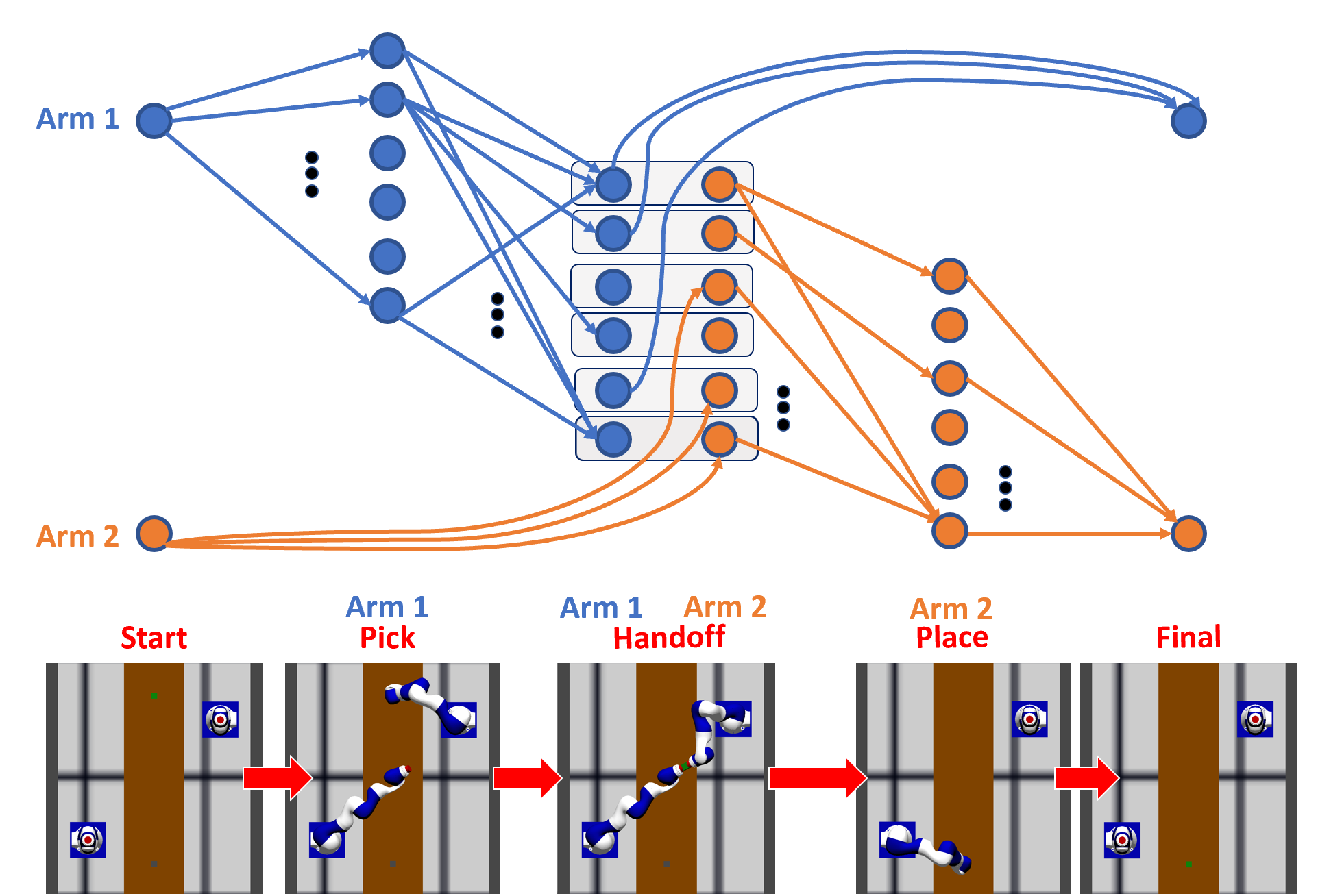 Figure 14
Figure 14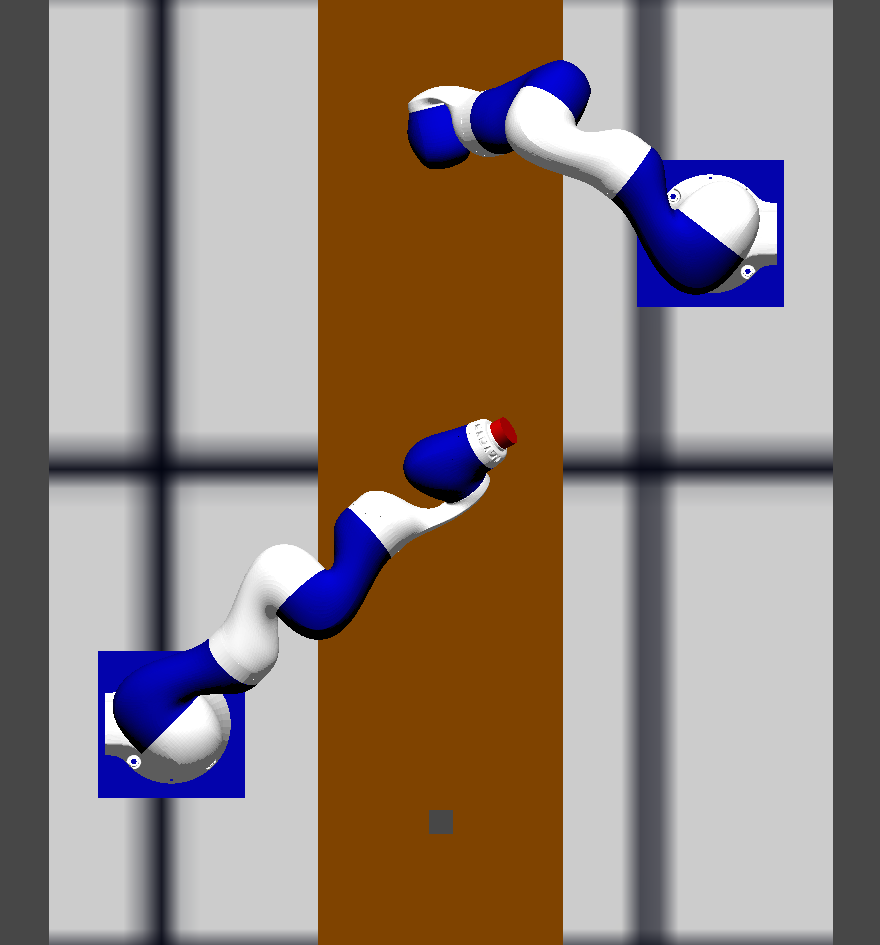 Figure 15
Figure 15 Figure 16
Figure 16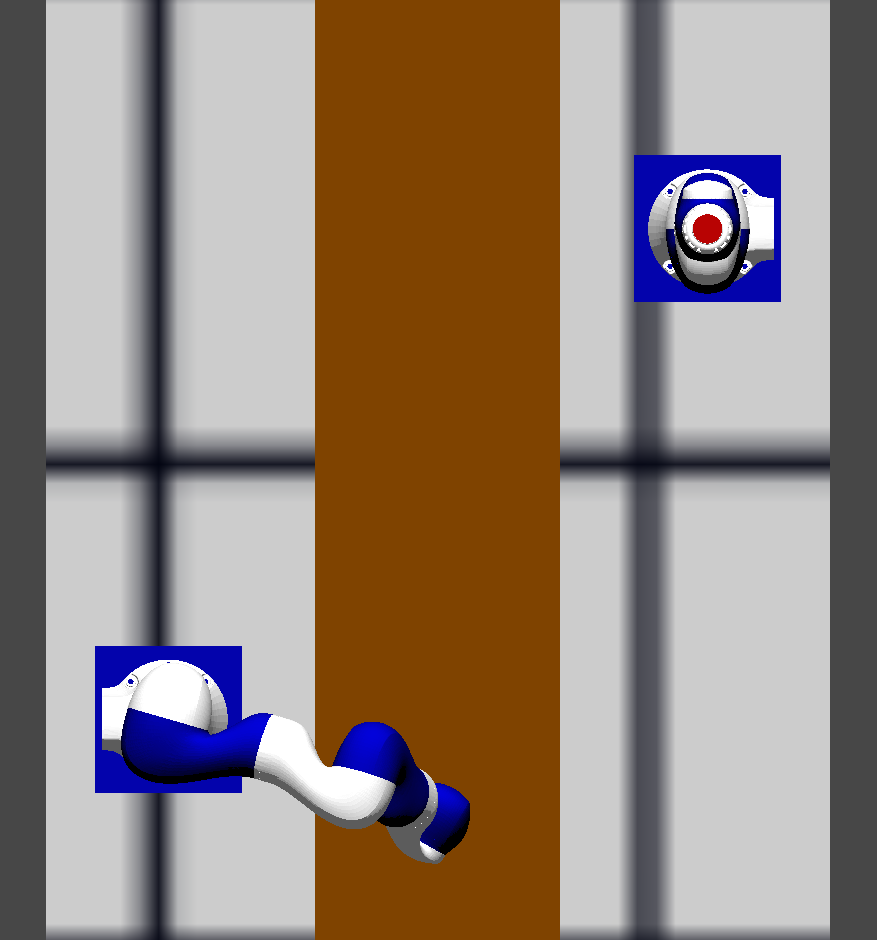 Figure 17
Figure 17 Figure 18
Figure 18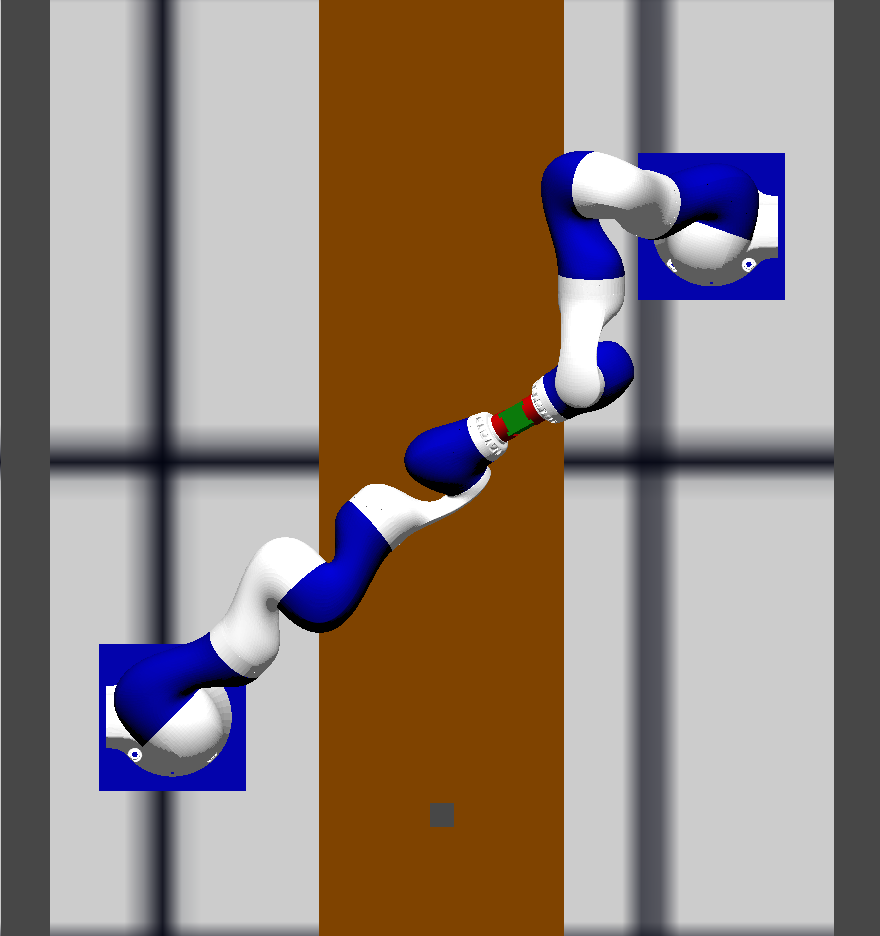 Figure 19
Figure 19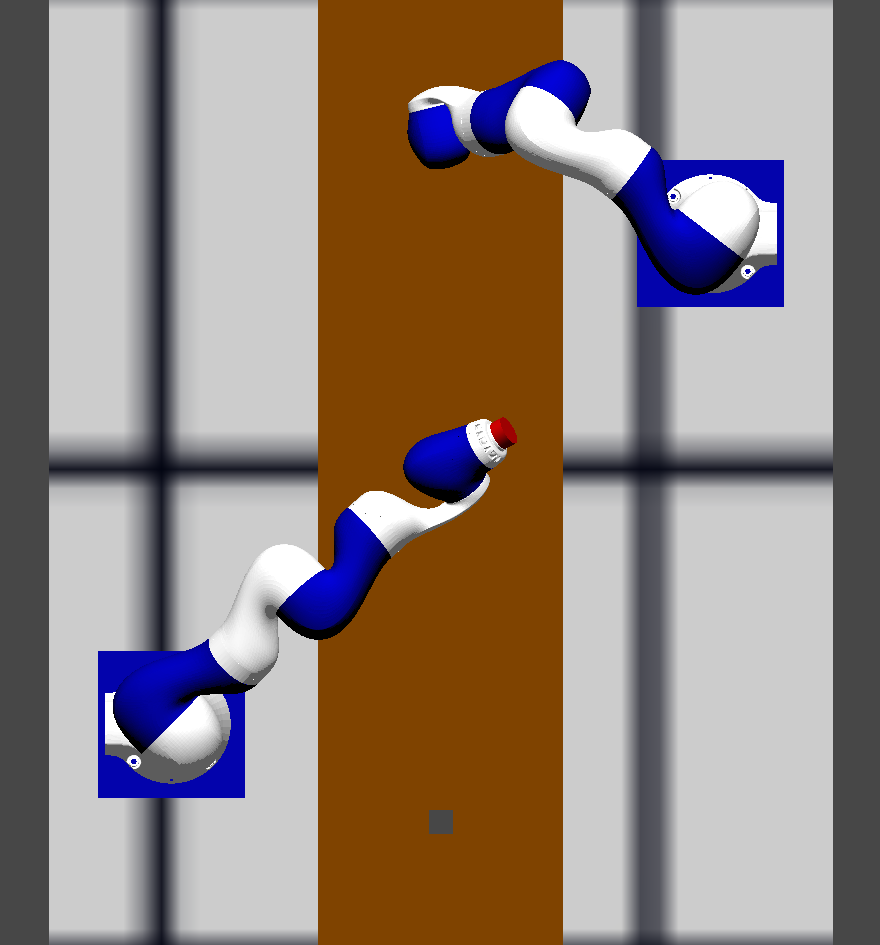 Figure 20
Figure 20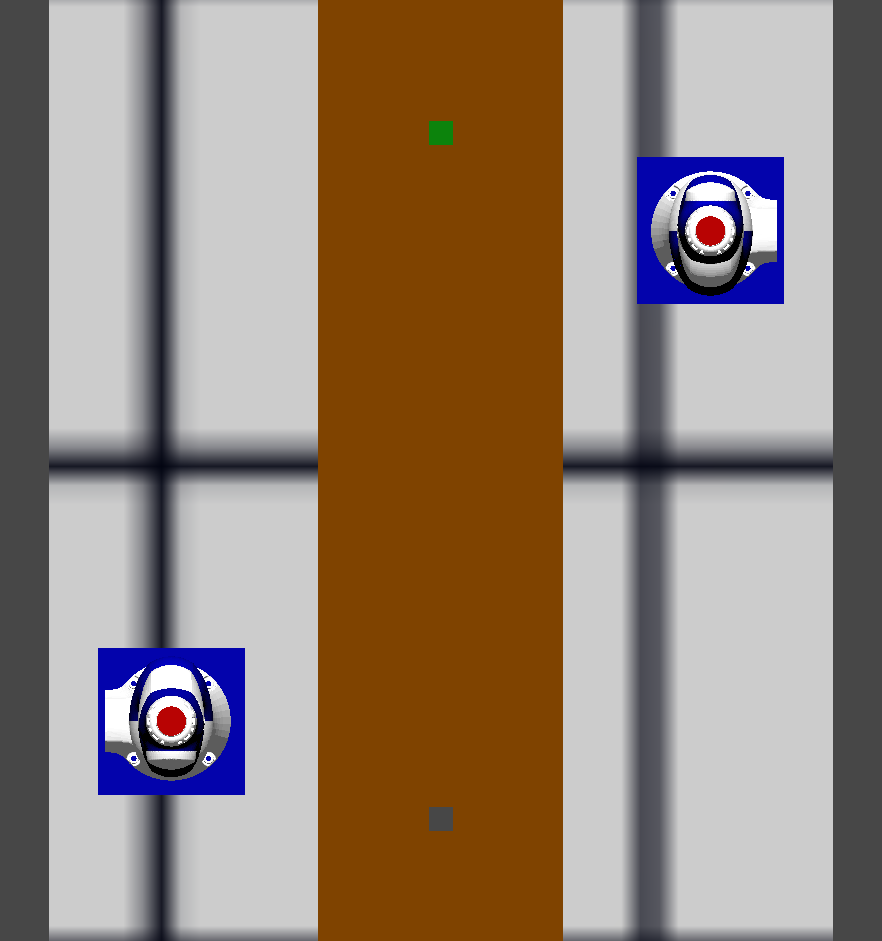 Figure 21
Figure 21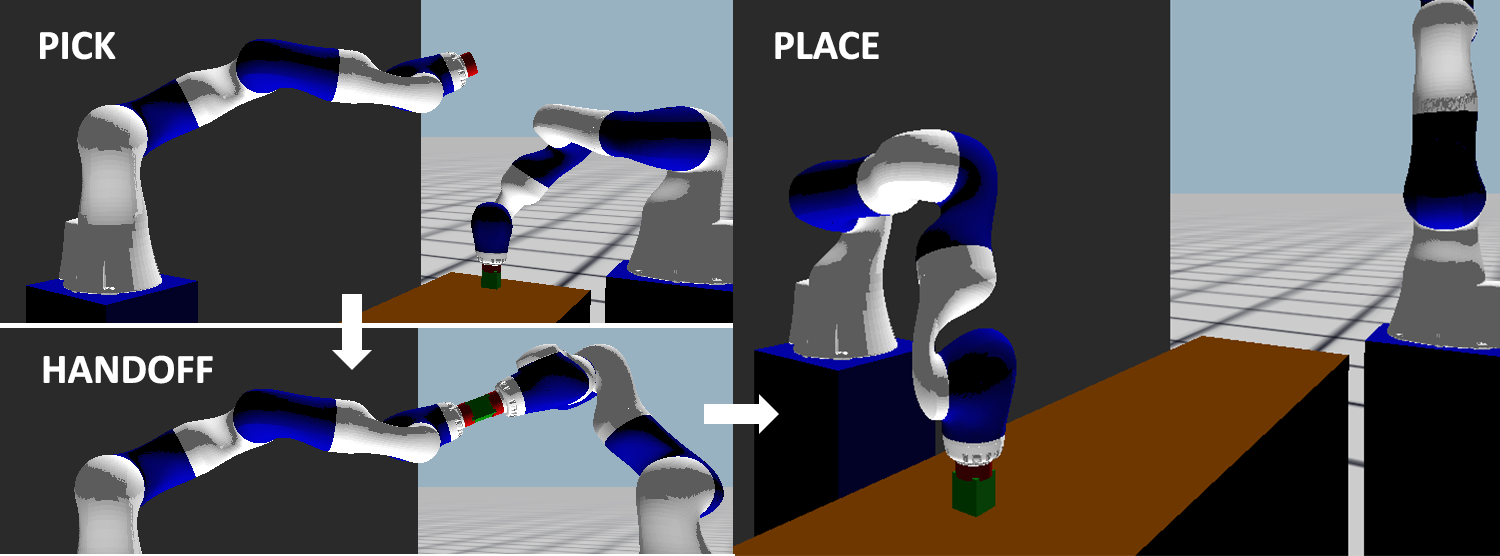 Figure 22
Figure 22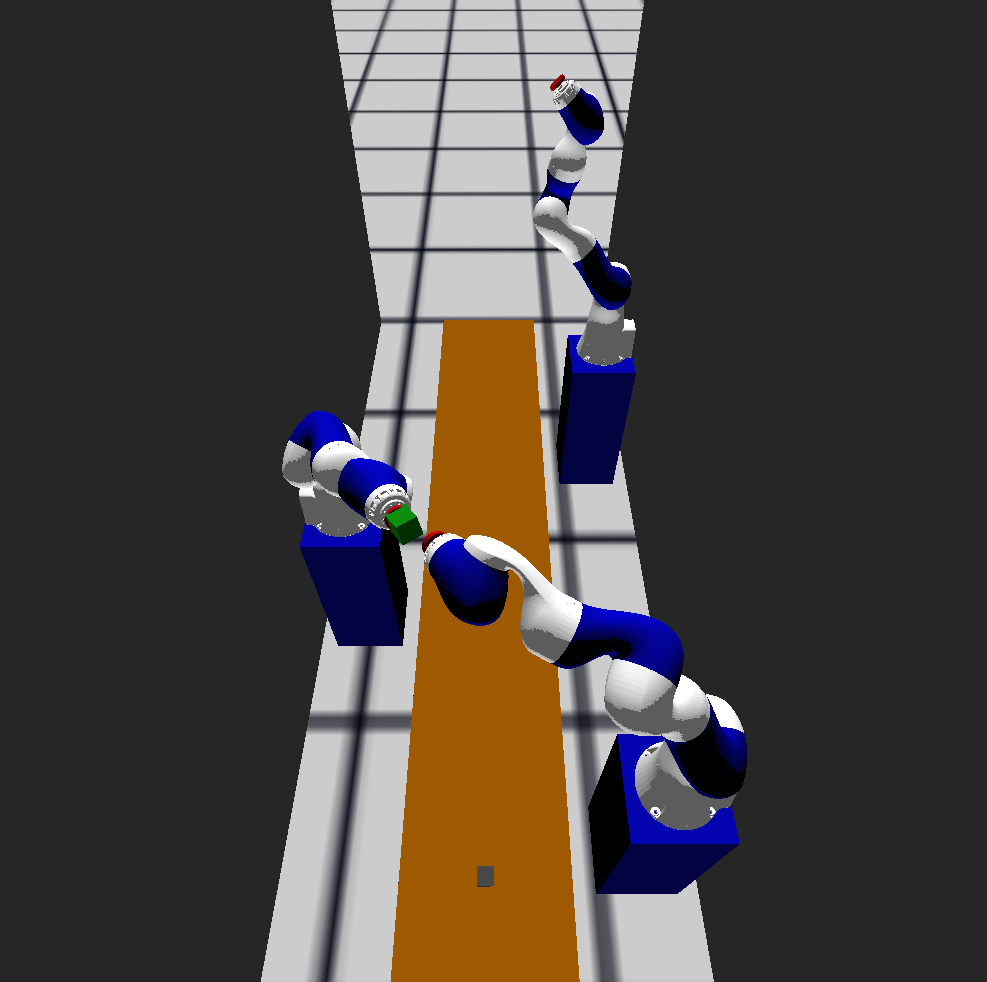 Figure 23
Figure 23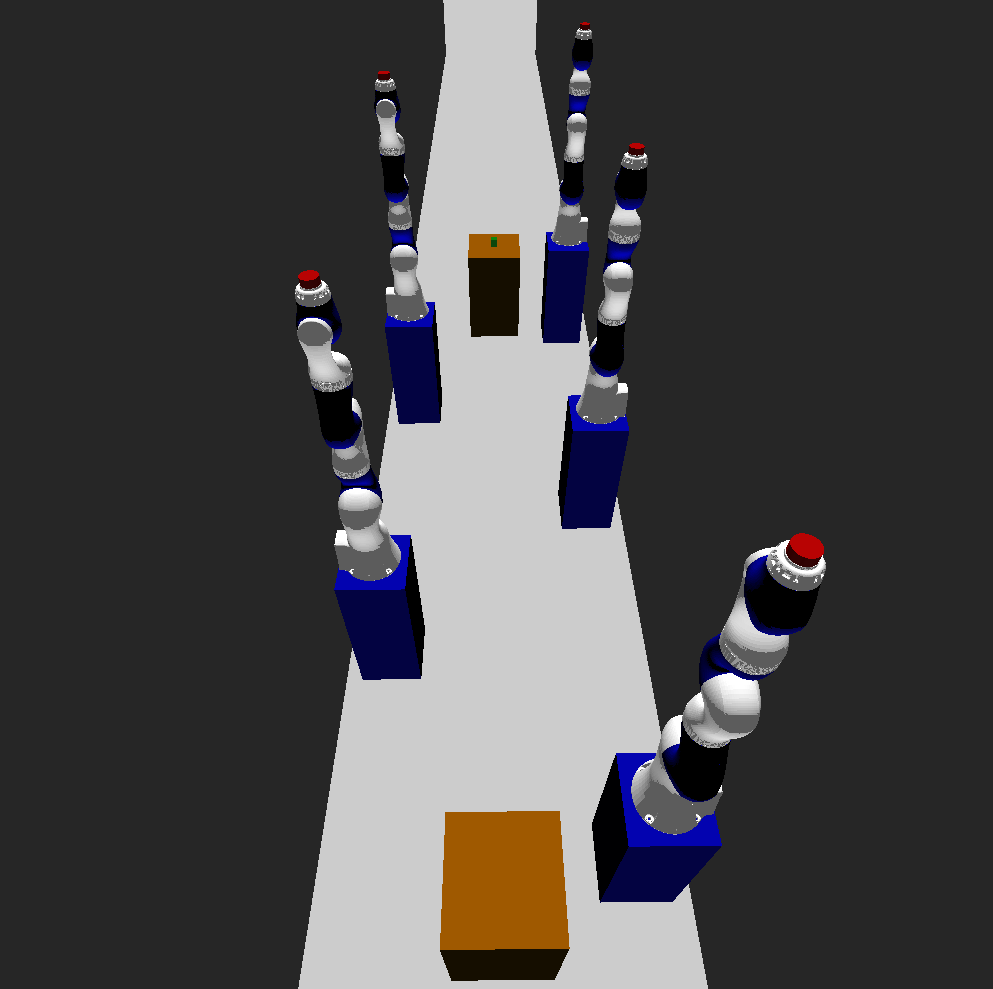 Figure 24
Figure 24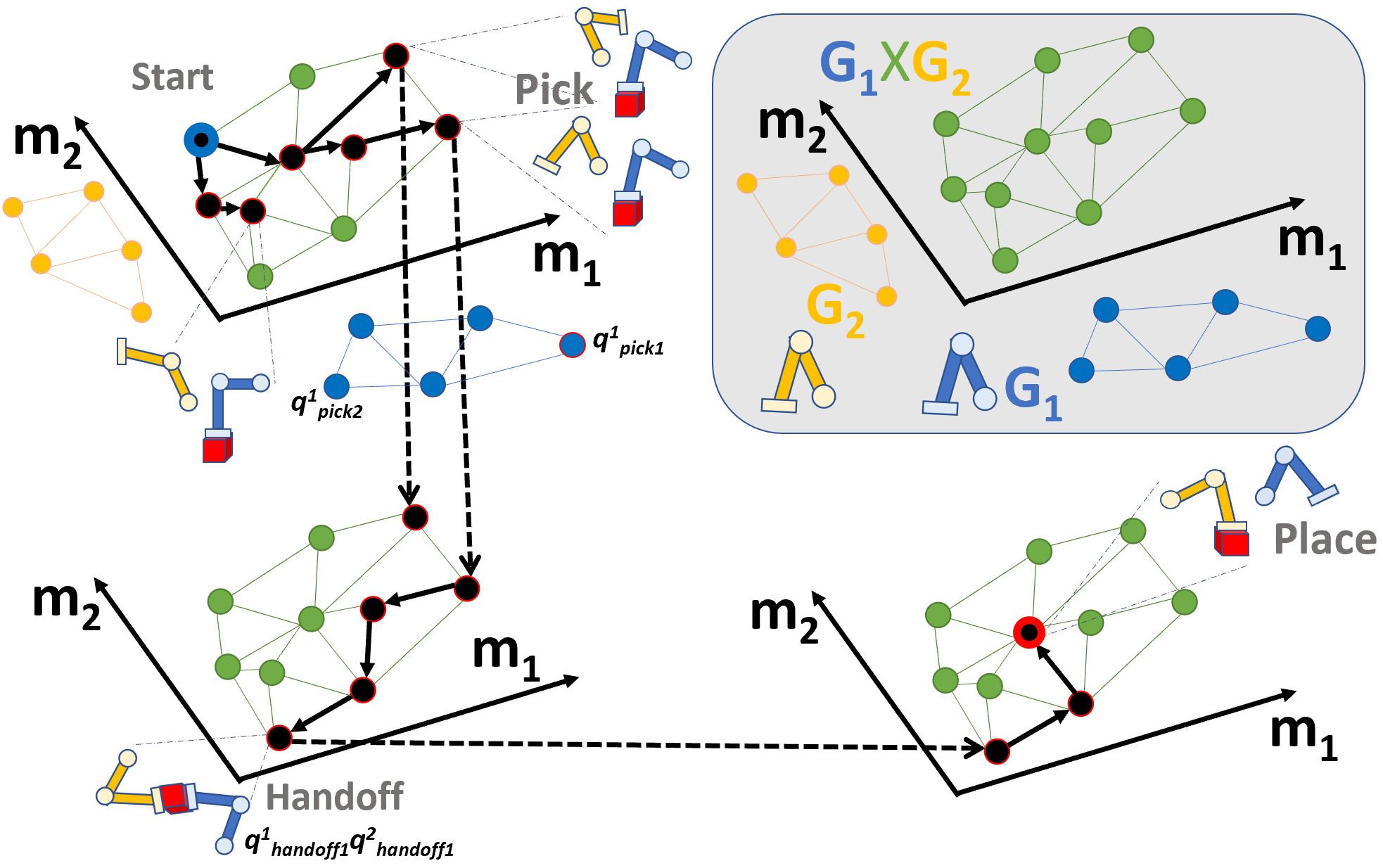 Figure 25
Figure 25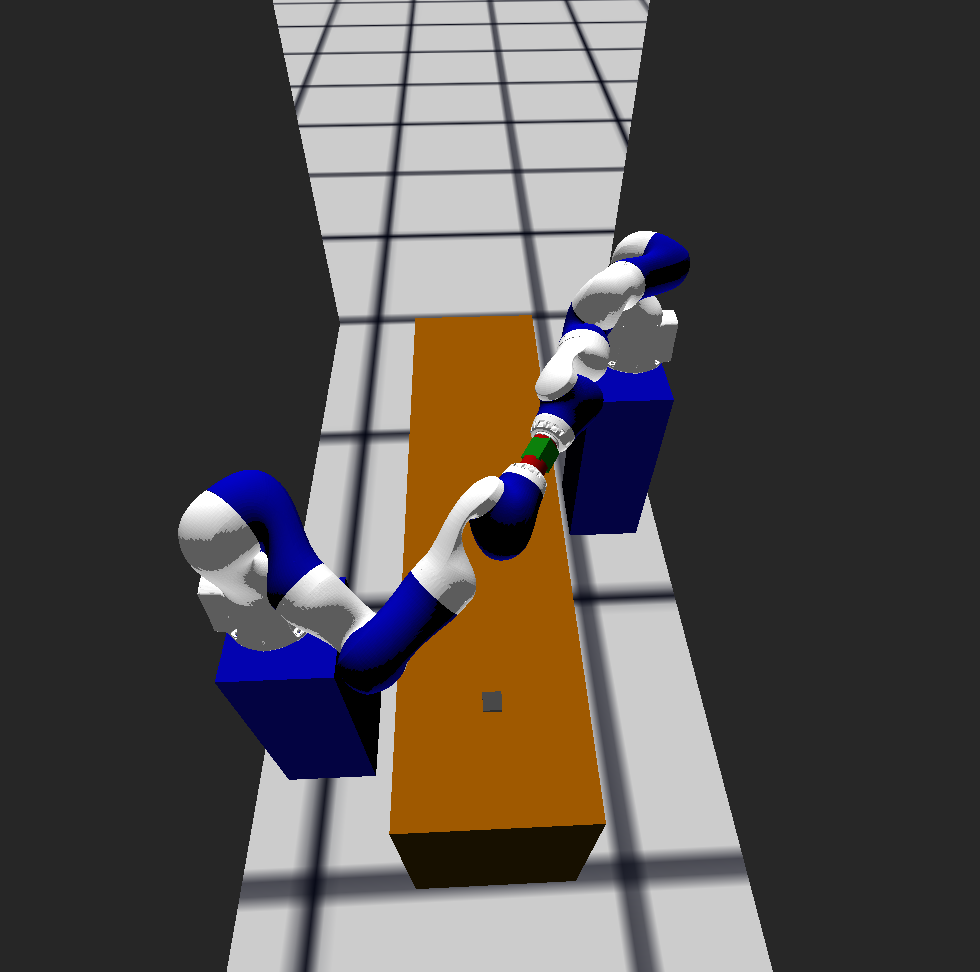 Figure 26
Figure 26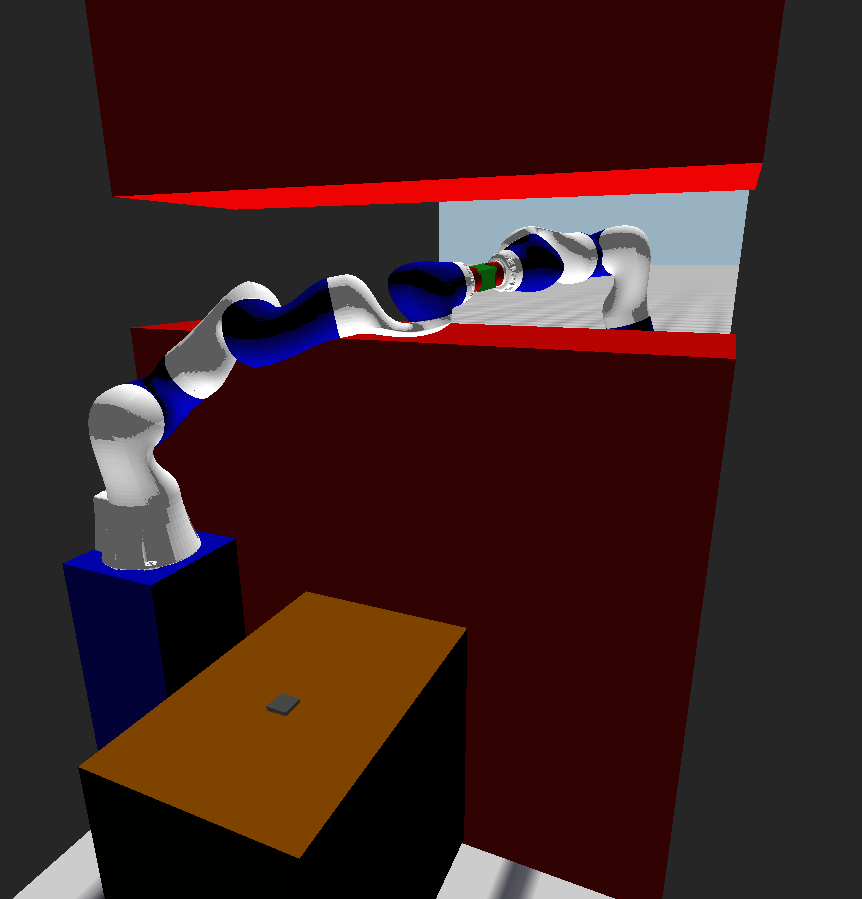 Figure 27
Figure 27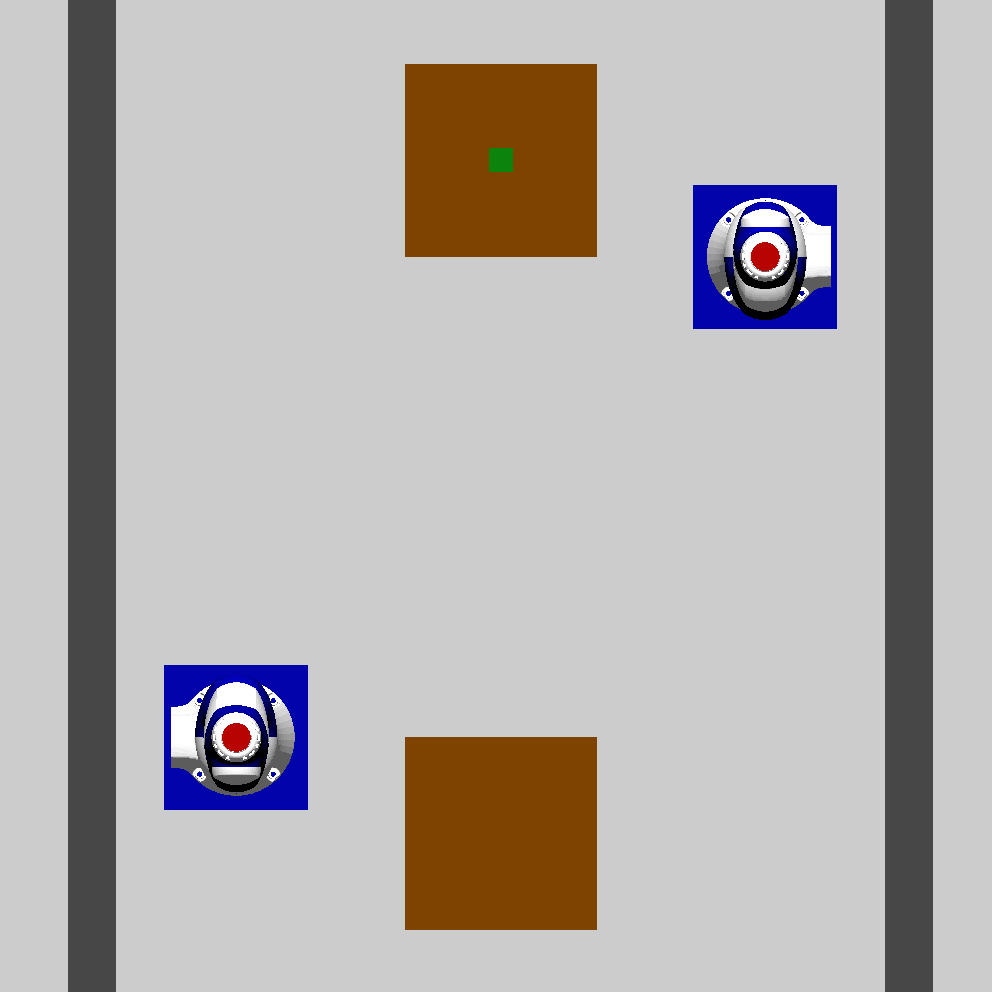 Figure 28
Figure 28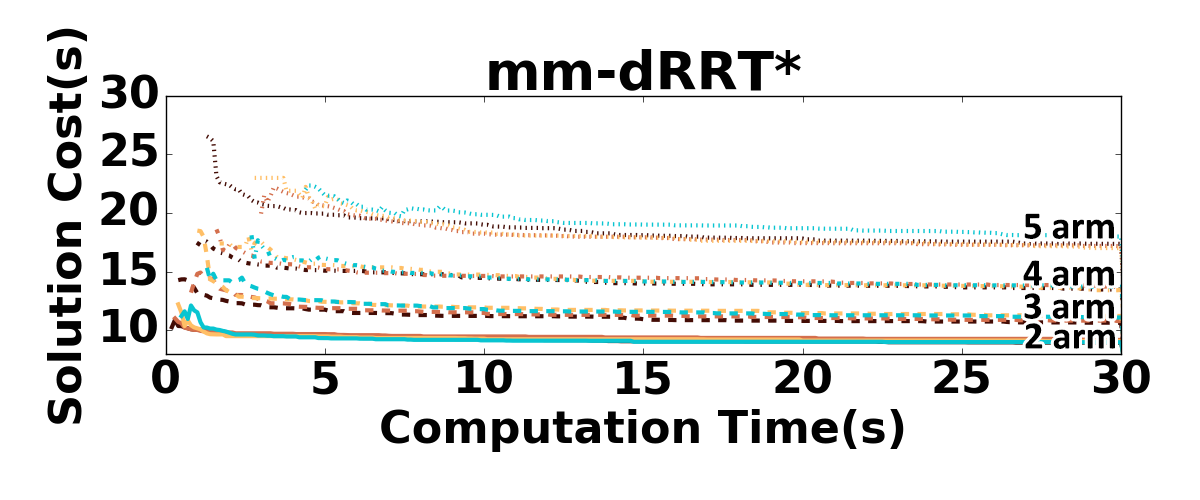 Figure 29
Figure 29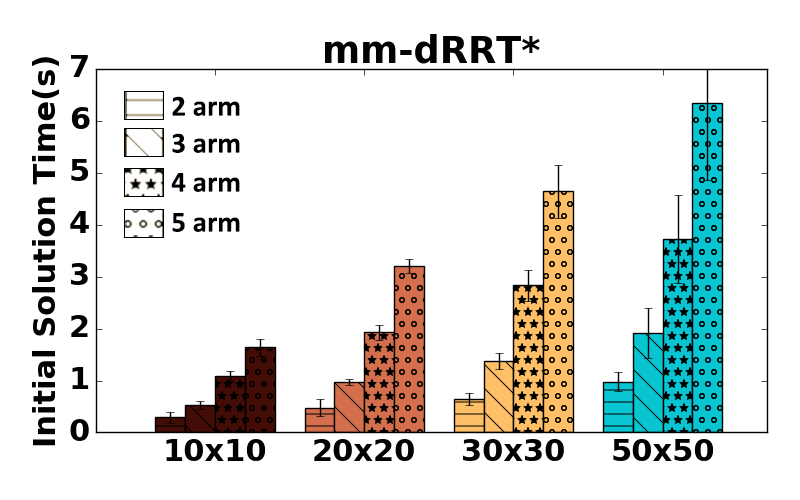 Figure 30
Figure 30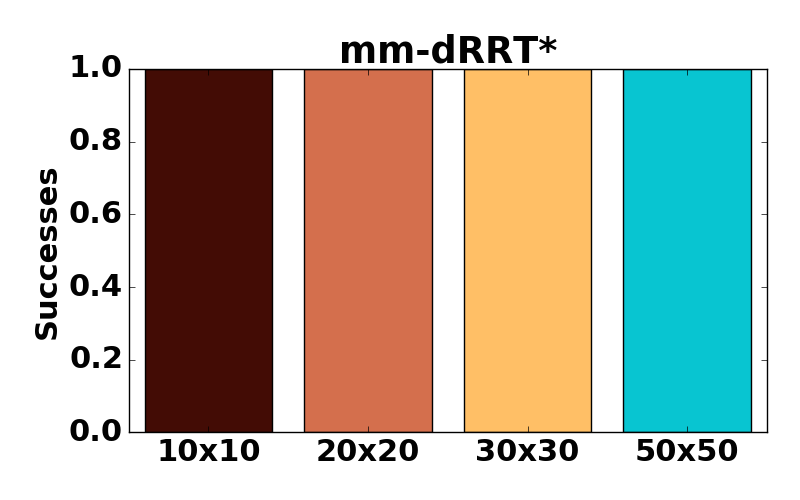 Figure 31
Figure 31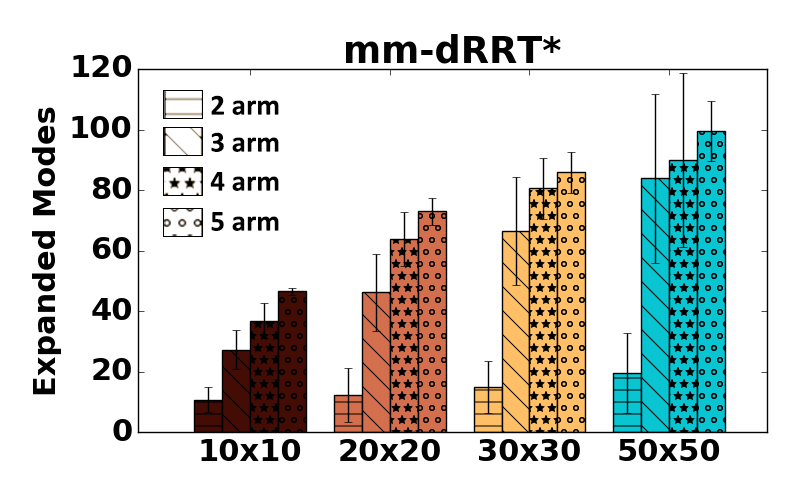 Figure 32
Figure 32Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Anytime Multi-arm Task and Motion Planning
for Pick-and-Place of Individual Objects via Handoffs
Rahul Shome and Kostas E. Bekris The authors are with the Computer Science Department of Rutgers University in New Brunswick, NJ, USA. {rahul.shome, kostas.bekris}@rutgers.edu
Abstract
Automation applications are pushing the deployment of many high DoF manipulators in warehouse and manufacturing environments. This has motivated many efforts on optimizing manipulation tasks involving a single arm. Coordinating multiple arms for manipulation, however, introduces additional computational challenges arising from the increased DoFs, as well as the combinatorial increase in the available operations that many manipulators can perform, including handoffs between arms. The focus here is on the case of pick-and-place tasks, which require a sequence of handoffs to be executed, so as to achieve computational efficiency, asymptotic optimality and practical anytime performance. The paper leverages recent advances in multi-robot motion planning for high DoF systems to propose a novel multi-modal extension of the algorithm. The key insight is that, instead of naively solving a sequence of motion planning problems, it is computationally advantageous to directly explore the composite space of the integrated multi-arm task and motion planning problem, given input sets of possible pick and handoff configurations. Asymptotic optimality guarantees are possible by sampling additional picks and handoffs over time. The evaluation shows that the approach finds initial solutions fast and improves their quality over time. It also succeeds in finding solutions to harder problem instances relative to alternatives and can scale effectively as the number of robots increases.
I Introduction
The use of manipulators for pick-and-place tasks in automation environments is driving a variety of applications [1, 2]. Coordinating more than one manipulator brings the promise of faster execution and enables a richer set of capabilities [3, 4]. The caveat is that manipulators are already high DoF robots, and coordinating multiple manipulators at the task planning level [5, 6] involves searching an even larger configuration space (-space). Furthermore, there is a larger set of operations beyond just picking and placing at the goal configuration, which involve handing off an object or placing it stably so that another manipulator grasps it.
Inspired by these tasks and challenges, this work aims to provide tools for integrated task and motion planning involving multiple manipulators with performance guarantees, such as asymptotic optimality, and practical computational performance, such as anytime behavior. Towards this objective, the current paper focuses on the case of pick-and-place tasks involving individual objects, which require handoffs between at least two manipulators, as in Fig 1. Handoffs significantly enhance the reachability capabilities of a static automation infrastructure beyond the volume of the workspace reachable by a single manipulator.
I-A Foundations
The pick-and-place via handoffs problem, abbreviated here as PHP, exposes most of the prototypical challenges of both multi-robot planning and integrated task and motion planning (TAMP). The search for a multi-arm TAMP solution requires adequate exploration of both different task operations, and motions, while allowing adequate opportunity to refine both components in terms of solution quality. This motivates anytime, integrated, multi-arm TAMP planning which poses unique challenges, aspects of which have been addressed in previous work.
Multi-robot motion planning research has approached the problem with decentralized solutions [7, 8, 9, 10, 11, 12] which reduce search space size by partitioning the problem into several sub-problems but typically lack completeness and optimality guarantees. In contrast, centralized approaches [13, 14, 15, 16, 17, 18] usually work in the combined high-dimensional configuration spaces, and thus tend to be slower than decoupled techniques but provide stronger theoretical guarantees.
Sampling-based approaches have been at the forefront of motion planning research [21, 22], including more recent asymptotically optimal (AO) variants [23, 24]. AO methods, however, require building rather dense data structures and can suffer scalability issues when dealing with multi-robot problems, where the number of DoFs of the system increases. Recent advances in sampling-based multi-robot motion planning focused on high DoF systems, such as the method [19, 20], help deal with the increase in the size of the composite -space by automatically taking advantage of any natural decoupling present in the problem and precomputation [17, 18, 16] expressing each robot’s reachability region. This work aims to build on top of this anytime, AO, sampling-based approach.
TAMP is a well studied problem in robotics. Work has focused on describing the general formulation [25] and the planning structures in the space of tasks [26, 27, 28], with different variants of solving tasks using manipulators including movable obstacles [29], non-prehensile [30, 31] or optimization [32] problems.
Most of the work has focused on hierarchical strategies, which typically commit to solutions from time-budgeted underlying motion planning subroutines, and heuristically [3, 39, 40] guide the search over actions in the task space [33, 34, 35]. An important aspect of manipulation task planning is the generation and evaluation of grasps that form these mode transitions. This is not a focus of the present work and it should be noted that we focus on devising effective search strategies for the PHP problem over a pre-specified set of picks, handoffs and drops.
It should be noted that as the number of robots increases in TAMP, so does the number of modes in the search space of task planning [6, 36]. The multi-arm problem has also been explored using a heuristic search-based approach[37], and using dynamical reasoning[38]. A keen observation in previous work [42, 43] about the nature of constraints that typically arise in TAMP lets these methods factorize the search space. The key idea [43] is that constraints that describe modes and transitions for tasks often affect only a subset of the systems (robots or objects), and can often be dealt with independently to speed up the search. For instance the picks only describe a constraint on the picking arm and the object, and not other arms. This means that task constraints that express modes of the task can underspecify the configuration of robots that are not involved.
Quite recently, there has been some interest in looking at the TAMP problem in a more integrated fashion [41, 42] and providing optimality guarantees. The benefit here is that an integrated approach ensures different choices of task modes and associated motions can be simultaneously explored and refined over time.
I-B Contribution
The key insight of this work is that in the case of the multi-arm TAMP problem, the principle of -space decomposition and search in also expresses the factored nature of the multi-arm TAMP problem, thereby enabling the design of an anytime, efficient multi-arm TAMP planner for searching over a set of picks and handoffs. The key contributions are listed as follows: *(1) *The current work extends the principle of decomposition of the composite multi-arm space to the TAMP domain in the PHP problem, and derives the same scalability, robustness and optimality benefits; *(2) *The proposed approach can operates over factored constraints can affect a subset of the arms, and ensures exploration of different realizations of the underspecified arm. *(3) *The method utilizes heuristics to guide the search towards fast initial solutions and the sampling-based exploration ensures anytime properties that refine the solution over time; *(4) *Experiments indicate that the method effectively scales to find solutions for a large number(demonstrated up to 5) of high DoF manipulators; *(5) *Asymptotic optimality arguments can be made when the set of picks and handoffs is augmented over time.
II Problem Setup
To simplify description, the problem setup will be outlined for two manipulators, and , operating in a shared workspace. The extension to more arms is straightforward and considered in the experimental section of this paper.
Each manipulator has its own -dimensional -space . The composite configuration space of both arms is . Then, a composite configuration is , where . is the obstacle subset, where either a manipulator collides with itself or with static obstacles, or manipulators collide with each other. is the valid subset.
The workspace also contains a single rigid body, , which can attain poses in the space .
Assumption 1** (Prehensile Pick)**
Each manipulator carries an end-effector that can immobilize the object with a relative pose between the object and the end-effector.
The manipulator is also able to stably place the object.
Assumption 2** (Object support)**
The object can be in either: (a) Stable poses: The object lies in stable contact with a resting surface. This includes the initial pose ; or in (b) Picked poses: Poses of the object where one or more manipulators are carrying the object.
The entire problem has a state space that is the Cartesian product of all the constituent -spaces, i.e., . The collision-free subset is defined as .
Assumption 3** (Singly-manipulable)**
A single manipulator can pick up and move the object.
Each object pose where can be picked is associated with at least one arm configuration for an , which makes contact with with a pick .
Definition 1** (Hand-off)**
A handoff is an instantaneous switching of an object from being supported by a pick by to being picked by , where .
A handoff pose constrains two manipulators. This means for a handoff pose , there is an associated for and for . Picks, places and handoffs define transitions between modes of the task.
Assumption 4** (Problem Domain)**
The following conditions hold: (i) 1 manipulator can reach the initial pose of , (ii) one manipulator can reach the final pose, (iii) no stable poses of are reachable by both manipulators.
Definition 2** (Pick-and-place via Hand-off Problem)**
Given an initial state and a final state , a valid solution to the PHP problem is a path , such that and , where , such that is a valid picking state, then a handoff state and a valid placement .
The cost function maps the path to a real number. The experiments considered the duration of the motion corresponding to .
Definition 3** (Asymptotically Optimal PHP)**
As computation time for an algorithm increases, the function of the solution discovered by the algorithm asymptotically converges to the cost of the optimal solution .
III Method
This section first introduces critical tools used by the proposed method and then goes over the algorithmic steps.
III-A Components
This following tools are used by the proposed framework.
III-A1 Transition Sampler
A module generates picking (for the picking arm at the initial object pose), handoff (for both arms and the object), and placement configurations (for the placing arm at the final object pose). An Inverse Kinematics solver is used for each arm at valid picking or placing end-effector poses. A handoff state is generated by sampling a new configuration for the arm that picks the object (for the corresponding pick ), and then solving IKs for the handoff arm given the object’s pose. This sampling process will eventually include all possible transitions.
III-A2 Mode Graph
The mode graph is a directed graph (Fig. 2), which contains all the components of the PHP problem and specifies the valid transitions between picks, handoffs and places. Each node contains
[TABLE]
thereby representing constraints for picks, places and handoffs. Picks are connected to handoffs by a directed edge if the picking manipulator maintains the same pick between its end-effector and the object. Similarly, edges between handoffs and places exist if the placing transform matches the pick at the handoff state for the same arm.
The construction of the graph ensures that a traversal through it for both the arms satisfies the PHP problem. Each edge can correspond to multiple possible motion plans, which can reach different states in the state space . Multiple such states can satisfy an underspecified mode constraint. For instance, while is performing the pick, is free to proceed to some state that might enable the next part of the solution to get optimized. The mode graph is input to planning method presented here.
Search over Mode Graph: The initial and final states correspond to two nodes on , denoted as and . A traversal of edges along the graph corresponds to executing motion plans for the arms. A solution to the problem will then correspond to:
[TABLE]
III-A3 Tensor Product Roadmap
A roadmap is constructed for each constituent manipulator. Then, a tensor product roadmap contains all combinations of vertices and neighborhoods that exist in the constituent roadmaps [16]. Prior work has shown that when the constituent roadmaps are constructed with asymptotically optimal properties, the tensor roadmap is also asymptotically optimal for the multi-robot problem [19, 20]. The approach does not need to explicitly store the tensor roadmap. Instead, the search process implicitly explores online over the set of constituent roadmaps , which is an input to the algorithm. This allows searching a very dense structure without incurring the space penalties.
III-B Algorithm
The proposed simultaneously searches over (a) different configurations of the arms as expressed via , and (b) different poses of the object. A node in the search tree \mathbb{T}\ keeps track of the composite arm configuration , the mode and fully specifies an object pose as it is the result of manipulation operations such as picks, handoffs and places. The method does so by building a search tree over the tensor roadmap and the mode graph . For notational simplicity, the object pose is not explicitly outlined in the algorithmic description, but is fully specified given a specific tree node given the sequence of arm configurations and modes along that branch of the tree.
The key features of the proposed method is the principle of searching over this decomposed search space of individual arm roadmaps, and the mode graph concurrently to effectively search for solutions in the task space . Following the benefits shown in previous work (), the search over this representation proves efficient when coupled with heuristic guidance of node expansions of the search tree. At each step, the algorithm tries to make progress from a node which describes an arm configuration, and an object pose associated with a mode . The expresses goals for the adjacent modes and can be used to guide the expansion towards them for each arm. In the case of underspecified modes, some of the arms might not have a specific target. In this case the guidance is used to look ahead to modes on that might be further away (e.g., at the picking mode, there is a goal for the manipulator that will pick the object but the handoff manipulator needs to make progress towards the handoff “region”). This strategy scales to multiple manipulators and modes. Such a search strategy lets the proposed method quickly make progress across modes, while ensuring both different arm motions, as well as different transitions are explored over time.
The high-level method is described in Algorithm 1. The mode graph, the initial and target modes are inputs. The algorithm builds a tree \mathbb{T}\ where each node of the tree is composed of the configuration of the manipulators and the mode , which is sufficient to represent a full task space state. Lines 1-4 initialize the algorithm with the initial starting configuration in . The loop over Lines 5-9 expands the tree, updates the path if found, and keeps track of the best solution discovered so far.
The expansion of the tree \mathbb{T}\ per iteration is described in Algo. 2. keeps track of whether the greedy heuristic allows the tree to approach the goal and continues the greedy behavior if it does so. Lines 1-3 describe the random exploration behavior which randomly selects a node in the tree, specifying the configuration and mode . A random neighbor for the configuration is selected from . Note that this can be performed by randomly selecting an adjacent vertex in each that composes .
The greedy behavior in Lines 4-6 invokes an oracle , which biases the tree expansion towards an adjacent mode. If a new node is added to the tree in Lines 7-8, the subroutine performs collision checking to verify whether the node addition is valid. The rewiring refines the neighborhood of the added node, taking care of respecting mode constraints, i.e., only rewiring nodes belonging to the same transition between modes. Lines 9-12 checks whether the newly added node satisfies the constraints in an adjacent mode . If so, the adjacent mode is added to the tree and heuristic gradient following is triggered. Lines 14-15 also triggers the greedy behavior if the added node displays a better heuristic .
The greedy node generation is outlined in Algo. 3. This module is aware of the mode graph . Line 1 decomposes the configuration into the constituent manipulator configurations . The subroutine performs a search over the mode graph to find a set of grounded configuration targets for each manipulator. Lines 3-4 chooses a neighbor in that minimizes the heuristic to target configurations . The new node is recomposed in Lines 5-6.
Implementation Details: The heuristic function used is the MAKESPAN or maximum of distances over all the manipulators, scaled by the maximum velocities of the joints. This lets the measure be consistent with cost that describes the duration of . Tree node additions are branched-and-bounded. The subroutine is aware of the heuristic estimates over and selects from the adjacent modes appropriately. The heuristic information over each in the form of all-pairs shortest paths in each roadmap is precomputed and cached. Each time a new mode is expanded, the corresponding configuration can be added the constituent roadmap . The heuristic information can be approximated by the nearest valid roadmap neighbor. The heuristic between two configurations not yet part of the roadmap (i.e., parts of the not yet explored) are estimated by pairwise MAKESPAN. Goal biasing involves a fraction of iterations where chooses from tree nodes, which have made the most progress over .
IV Sketch of Properties
Given a mode graph , an optimal solution to the PHP problem will trace a sequence of task space states , , and that represent the mode transitions that solve the problem optimally. In order to ensure asymptotic optimality, given enough samples and time, the algorithm has to guarantee the following asymptotically: (a) it discovers a sequence of transitions that converges to the sequence of optimal mode transitions, and (b) it discovers a collision free path between each pair of mode transitions, that converges to the optimal such connection.
Firstly using results from [19, 20] it can be argued that given any pair of states that might represent a pair of mode transitions, the tree expansion strategy in Algo. 2 ensures asymptotic optimality of the connection between them given enough time and large enough number of samples in the underlying roadmaps.
Secondly, the problem of discovering the optimal sequence of transitions has to be addressed. In cases where the mode transition states are fully specified in , like for handoff states, their discovery is ensured if the algorithm guarantees exploration of all modes in . Line 2,3 of Algo. 2 guarantees this exploration. Nevertheless, some of the modes in , say picks, underspecify the constraints on the full state. The exploration of different options for an unconstrained arms have to guarantee convergence to such a state, say in the case of picks. Line 2,3 of Algo. 2 again guarantees that every node in the tensor roadmap is explored. As the size of the constituent roadmaps increases, asymptotically the existence of a sample close enough to is guaranteed to exist in the tensor roadmap, ensuring convergence.
Bringing both the arguments together, is AO given enough iterations and enough samples in the individual roadmaps for solving the problem over an input . The indications also imply that if keeps getting augmented the arguments can extend to general planning problems that can be described by such a mode graph. The detailed exposition of the corresponding proof is left for future work.
V Results
This section evaluates the proposed method in simulated setups involving multiple robotic arms. The focus in three considered benchmarks is on the following aspects:
Size of : The experiments consider an input mode graph of increasing size and connectivity.
- -
Tight Spaces: Obstacles are introduced in the second benchmark, which make the problem harder.
- -
Scalability: The effect of planning for an increasing number of high DoF robots.
The benchmarks use - KUKA-iiwa14 arms placed in an offset manner so that they can execute handoffs, while one of them can pick the object at the initial pose and another robot can place it at the goal pose (e.g., as shown in Fig 4).
The problem of generating candidate picks is not the focus in this work. The benchmarks deal with a cuboid object for which a single picking pose is defined at the top face and one at the bottom face. Each handoff configuration involves the manipulators picking the object on opposite faces. The increase in the size of is achieved by solving for an increased number of inverse kinematics solutions for the pick and handoff configurations. The target object orientation is flipped to allow the placing manipulator to properly place the object. The number of the arm picking and handoff configurations range over and for each benchmark, leading to combination of choices for pick and handoff orderings for arms. These configurations are collision checked to ensure that they are valid for each scene.
The proposed is compared against two different strategies of TAMP frameworks, each one of them using two different underlying AO motion planners.
(a) *TAMP-PRM∗, TAMP-*RRT∗: The TAMP variants search sequentially over the space of modes. They start with and first plan a solution by considering all the adjacent to (i.e., the picking states). Underspecified manipulators are trivially assigned to a home position. The method then commits to the reached and the search progresses till is reached. TAMP-RRT∗ is rerun from the start if there is any time remaining.
(b) *H-ord PRM∗, H-ord *RRT∗: The heuristically ordered variants perform a DFS over . The approach similarly considers a set of target configurations along adjacent modes. These are then heuristically ordered and tried in sequence. Once one succeeds, the search progresses until is reached or planning fails. The method then backtracks and keeps trying till the time limit.
(b) *H-ord PRM∗, H-ord *RRT∗: The heuristically ordered variants first select the best adjacent neighbor for every mode on , in terms of the heuristic estimate, starting from . They solve motion planning queries till they find the solution. If they fail at any point, they move on to the next best neighbor according to the heuristic. So as to ensure a fair chance to all modes, a time budget of 10s is assigned on each individual query. The heuristic is the pairwise MAKESPAN over scaled by the max velocity of the arms.
Each experiment was executed single-threaded on a 32 core Intel(R) Xeon(R) CPU E5-1660 v3 @ 3.00GHz machine with 32 GB of RAM. Data is reported as averages over 50 randomized trials of 30s for different . Individual arm roadmaps of size 200 were used for (giving rise to an implicit tensor product of where is the number of arms. The PRM∗ variants were executed on a 20k node roadmap constructed over the 14-dim configuration space of both robots. The implicit nature of the tensor roadmap allows for two-orders of magnitude benefits in space requirements relative to PRM∗.
Tabletop Benchmark: Fig. 4 shows the runs of the algorithm on a tabletop scene. The data indicates the baseline performance of the algorithms in searching over different sizes of when the planning problem is easy. finds better quality solutions than PRM∗ variants. PRM∗ is the fastest because it has to do very little online computation, but is competitive in terms of initial solution times. RRT∗ takes longer to find better solutions.
Narrow Passage Benchmark: A dividing wall with a slit is introduced to the scene as shown in Fig. 5. PRM∗ now suffers in success rate from the brittleness of the roadmap, and takes longer to find the initial solution. RRT∗ also suffers in terms of success rate. mm succeeds in all but one run and its initial solution time is better than competing methods over all runs. The number of expanded modes indicates improved exploration over for mm.
N-arm Scalability: Fig 6 shows the results from a execution of the algorithm for a chained sequence of handoffs involving 2, 3, 4 and 5 arms, to transfer the object across the workspace. Fast initial solution times indicate that the method scales well with a larger number of robots. For 5 robots and 50 picks and handoffs, the planner simultaneously searches over a tensor roadmap of size , and possible mode traversals.
VI Discussion
The current work proposes a multi-modal approach with a specific focus on solving a pick-and-place via handoff problem for high-DoFmanipulators. Results indicate that the principles of tensor roadmap decomposition and heuristic guidance transfer nicely to the multi-modal domain. The proposed anytime method finds fast initial solutions and is robust to harder instances of the problem. Theoretical arguments indicate asymptotic optimality of the approach for a given set of mode transitions.
The promising results motivate applying the same framework to more general problem classes of multi-arm TAMP involving richer sets of modes and operations, which can include like generalized grasps, online grasp discovery, regrasping, bi-manual manipulation, multi-object rearrangement, and tasks involving dynamics, such as throwing, pushing and within-hand manipulation.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] N. Correll, K. E. Bekris, D. Berenson, O. Brock, A. Causo, K. Hauser, K. Okada, A. Rodriguez, J. Romano, and P. Wurman, “”analysis and observations from the first amazon picking challenge”,” in IEEE Transactions on Automation Science and Engineering (T-ASE) , no. 99, 2016, pp. 1–17.
- 2[2] R. Shome, W. N. Tang, C. Song, C. Mitash, H. Kourtev, J. Yu, A. Boularias, and K. E. Bekris, “Towards robust product packing with a minimalistic end-effector,” in IEEE International Conference on Robotics and Automation (ICRA) , 2019.
- 3[3] A. Akbari, F. Lagriffoul, and J. Rosell, “Combined heuristic task and motion planning for bi-manual robots,” Autonomous Robots , pp. 1–16, 2018.
- 4[4] R. Shome, K. Solovey, J. Yu, D. Halperin, and K. E. Bekris, “Fast, high-quality dual-arm rearrangement in synchronous, monotone tabletop setups,” in WAFR , 2018.
- 5[5] Y. Koga and J.-C. Latombe, “On Multi-arm Manipulation Planning,” in Prof. of the IEEE Intern. Conference on Robotics and Automation (ICRA) , 1994.
- 6[6] A. Dobson and K. E. Bekris, “Planning representations and algorithms for prehensile multi-arm manipulation,” in Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on . IEEE, 2015, pp. 6381–6386.
- 7[7] M. A. Erdmann and T. Lozano-Pérez, “On multiple moving objects,” in ICRA , 1986.
- 8[8] R. Ghrist, J. M. O’Kane, and S. M. La Valle, “Computing Pareto Optimal Coordinations on Roadmaps,” IJRR , vol. 24, no. 11, 2005.