Distributed Adaptive Consensus Control of High Order Unknown Nonlinear Networked Systems with Guaranteed Performance
Hashim A Hashim

TL;DR
This paper introduces a distributed adaptive control method for high-order nonlinear multi-agent systems that guarantees prescribed performance and robustness despite unknown dynamics and external disturbances.
Contribution
It proposes a novel adaptive cooperative tracking control with prescribed performance function for high-order nonlinear multi-agent systems with unknown dynamics.
Findings
Agents successfully track leader trajectories with bounded errors.
The control method is robust against uncertainties and disturbances.
Validated on highly nonlinear heterogeneous networks.
Abstract
Adaptive cooperative tracking control with prescribed performance function (PPF) is proposed for high-order nonlinear multi-agent systems. The tracking error originally within a known large set is confined to a smaller predefined set using this approach. Using output error transformation, the constrained system is relaxed and mapped to an unconstrained one. The controller is conceived under the assumption that the agents' nonlinear dynamics are unknown and the perceived network is structured and strongly connected. Under the proposed controller, all agents track the trajectory of the leader node with guaranteed uniform ultimately bounded transformed error and bounded adaptive estimate of unknown parameters and dynamics. In addition, the proposed controllers with PPF are distributed such that each follower agent requires information between its own state relative to connected neighbors.…
Click any figure to enlarge with its caption.
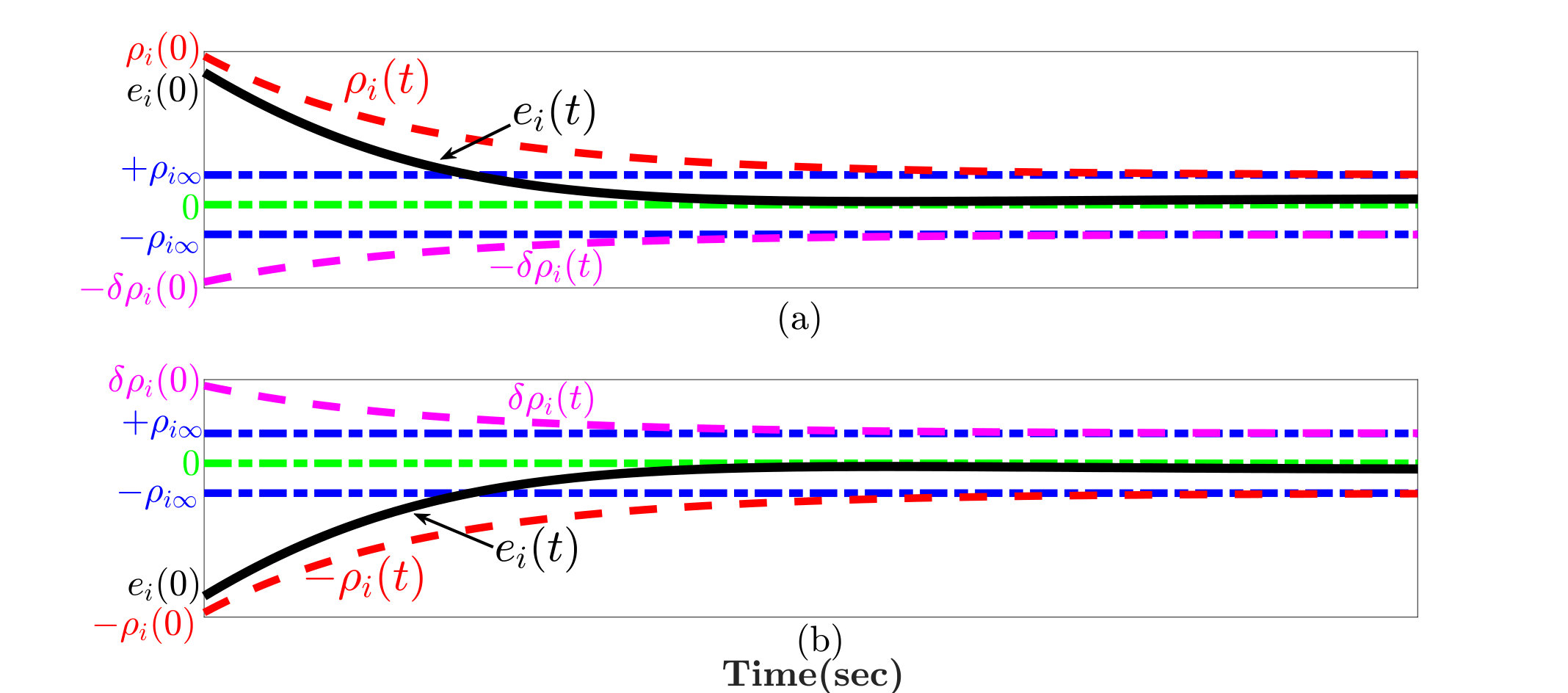 Figure 1
Figure 1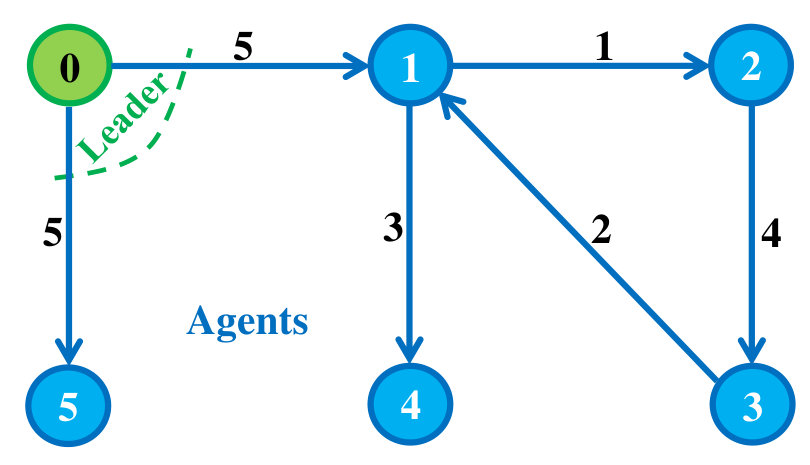 Figure 2
Figure 2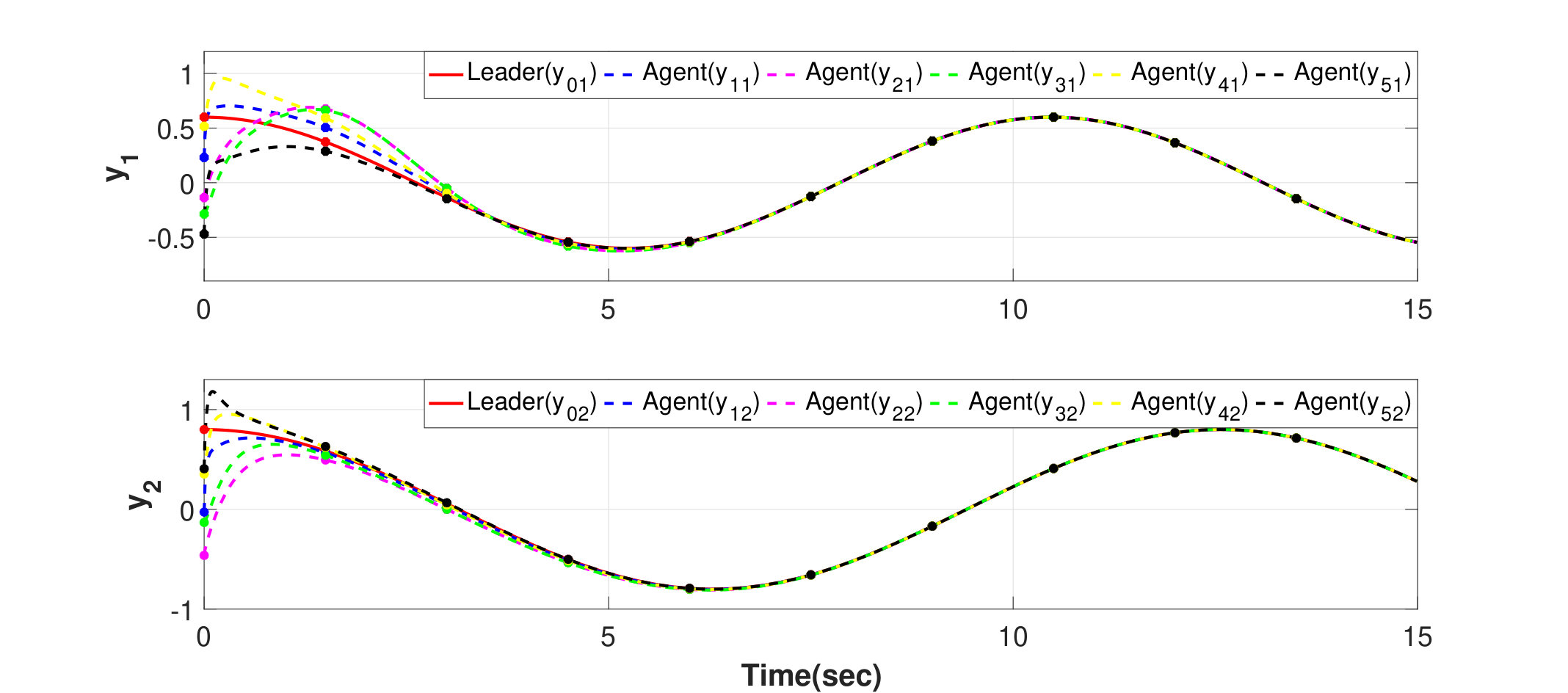 Figure 3
Figure 3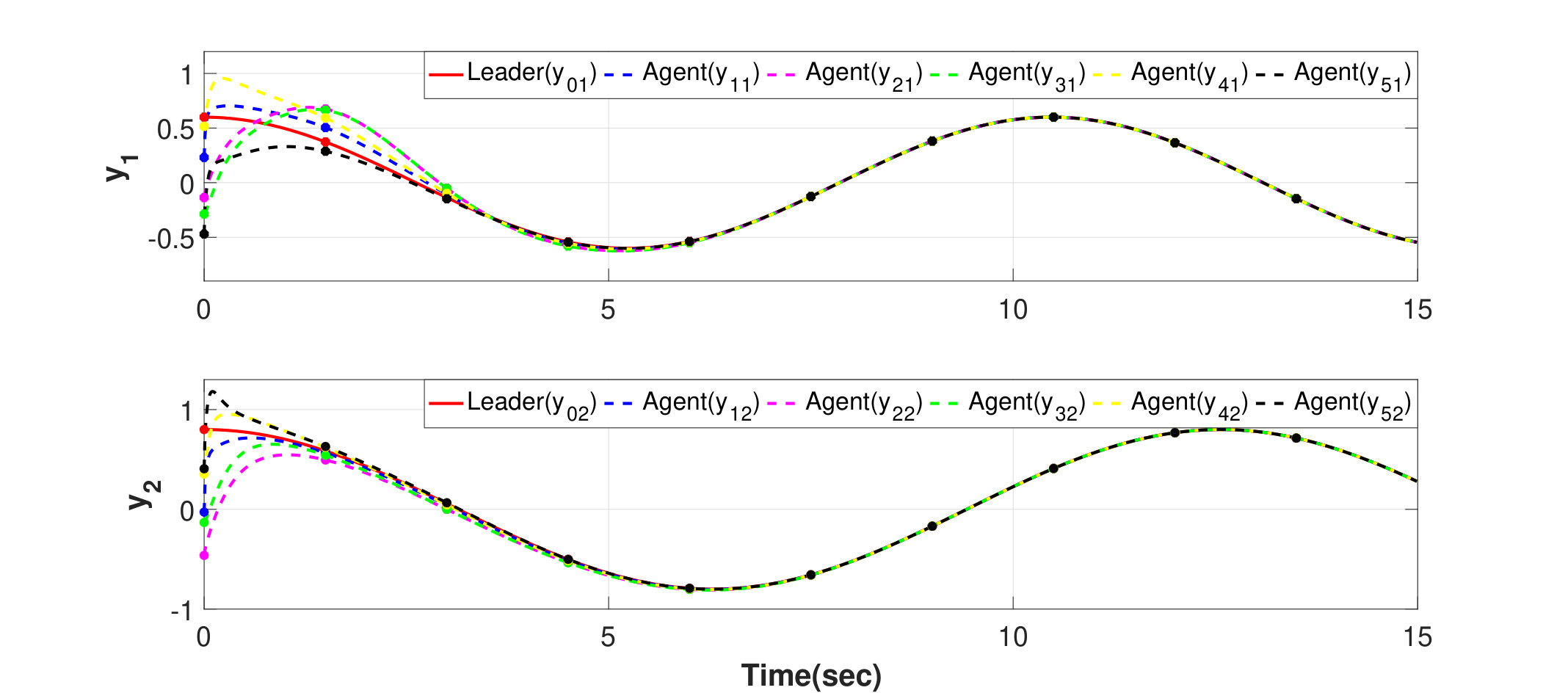 Figure 3
Figure 3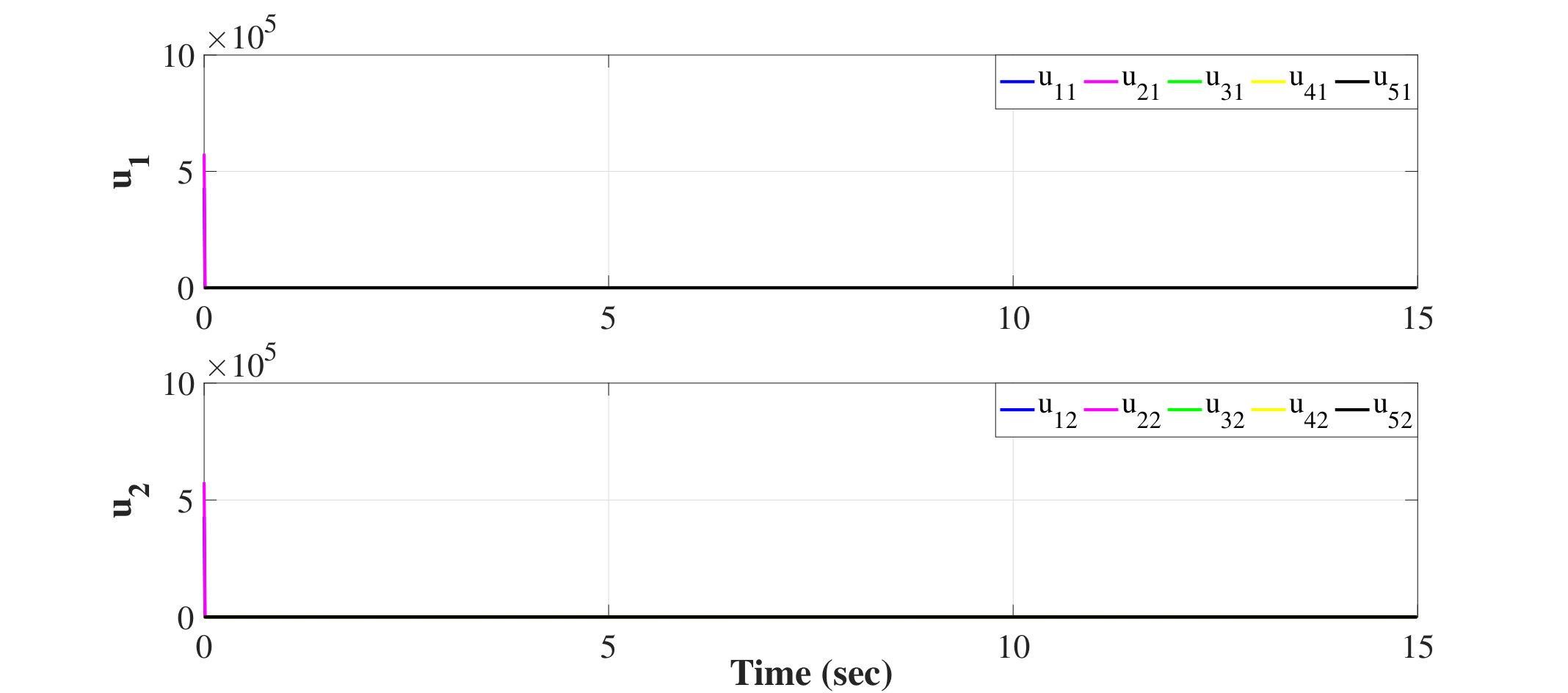 Figure 4
Figure 4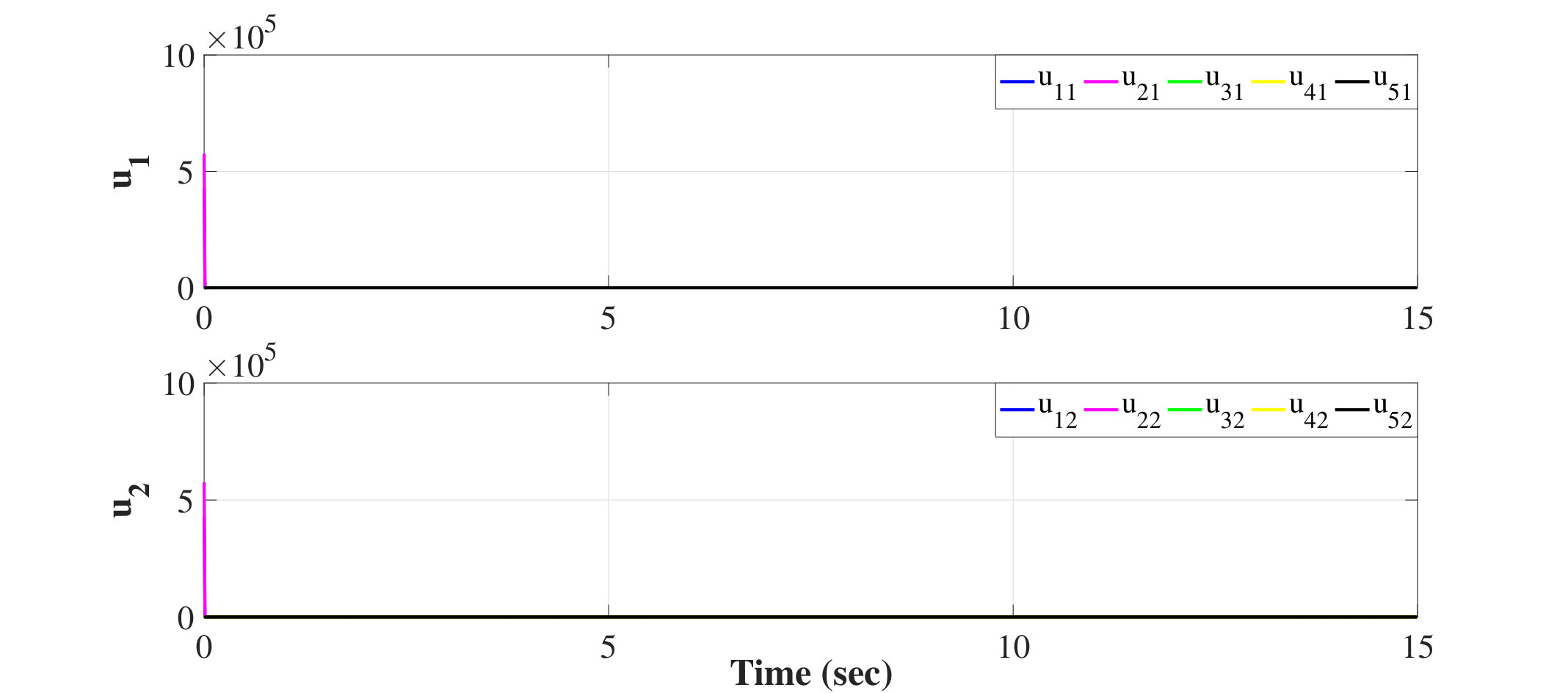 Figure 4
Figure 4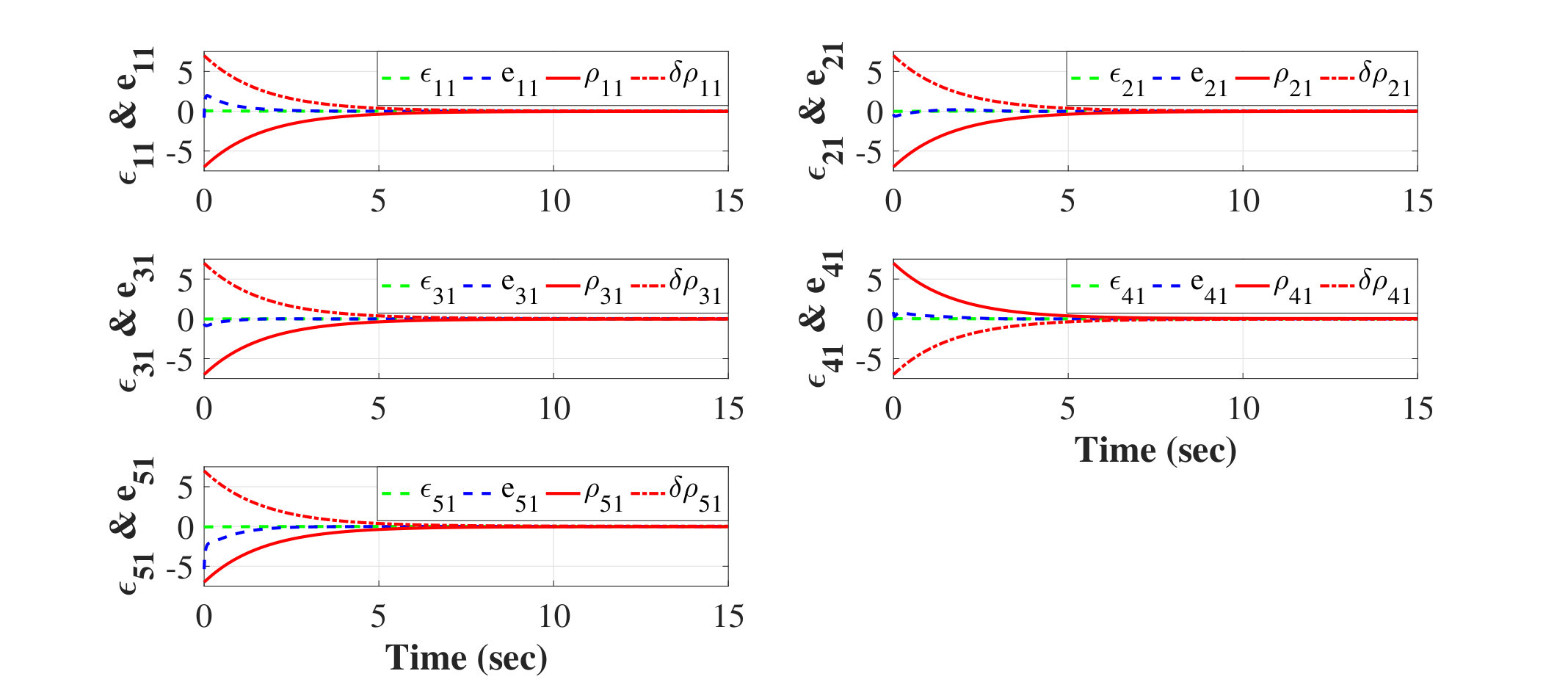 Figure 5
Figure 5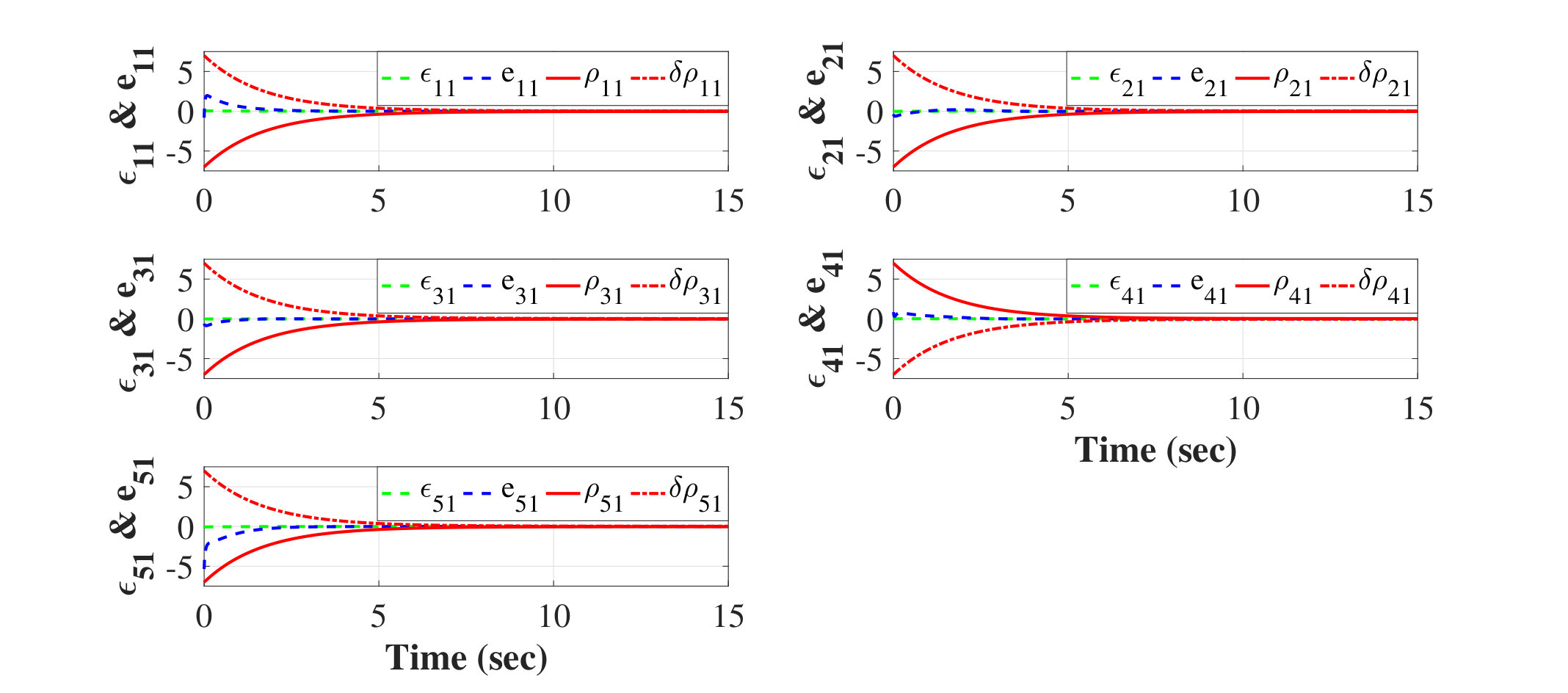 Figure 5
Figure 5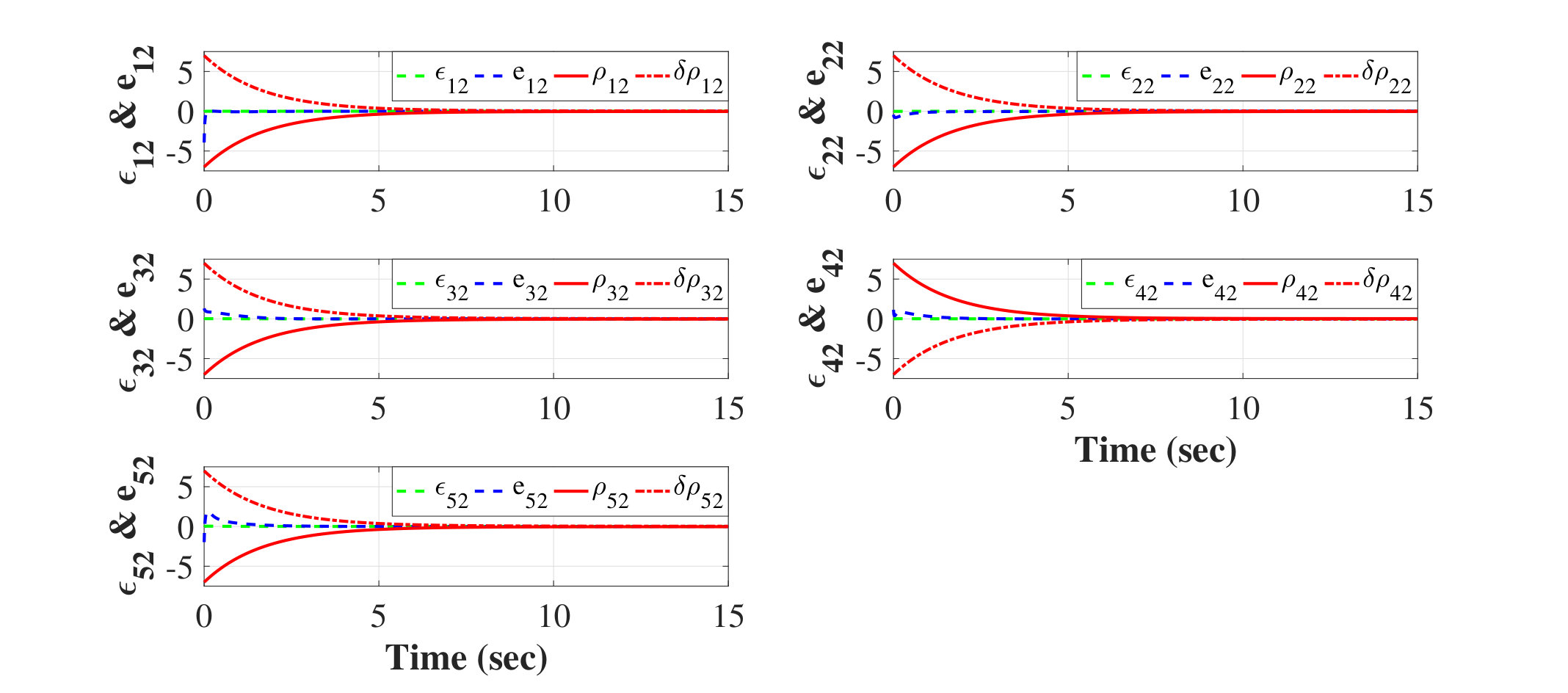 Figure 6
Figure 6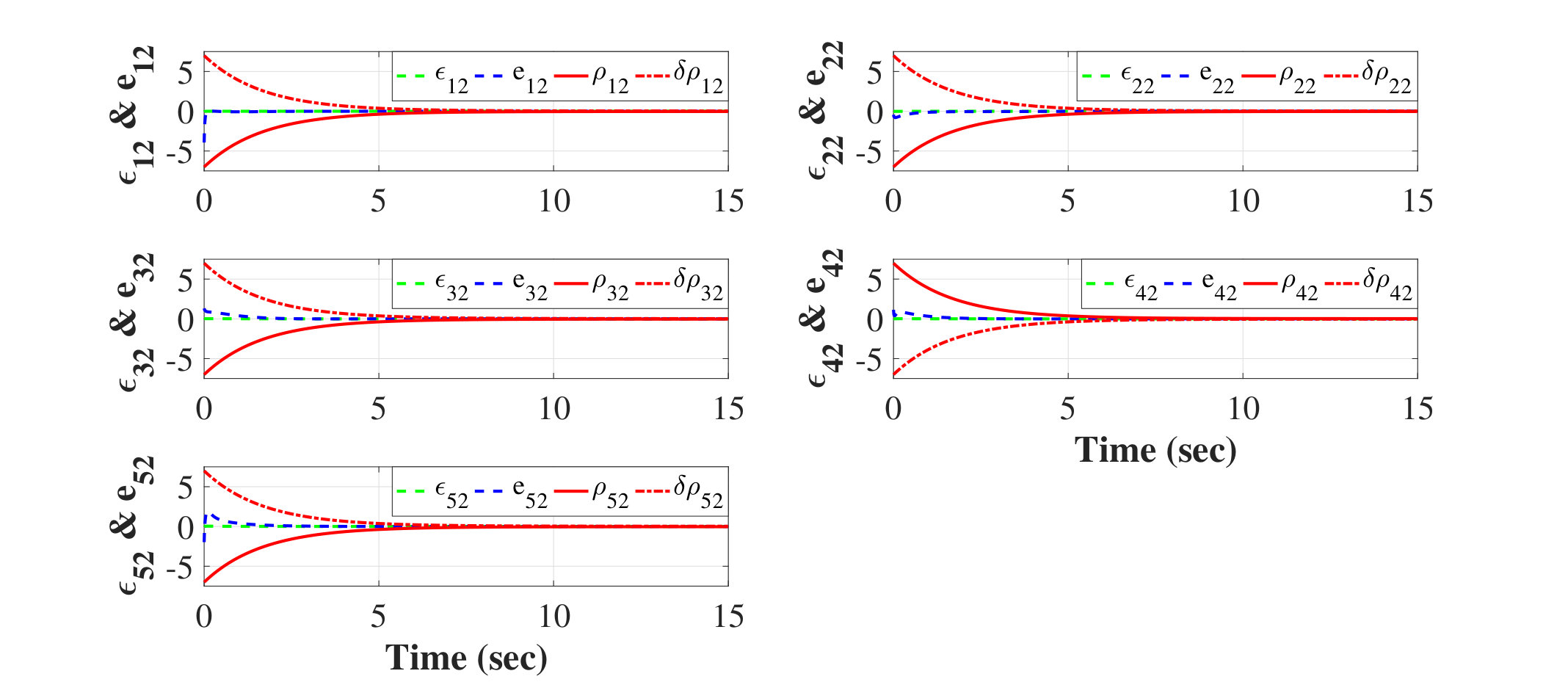 Figure 6
Figure 6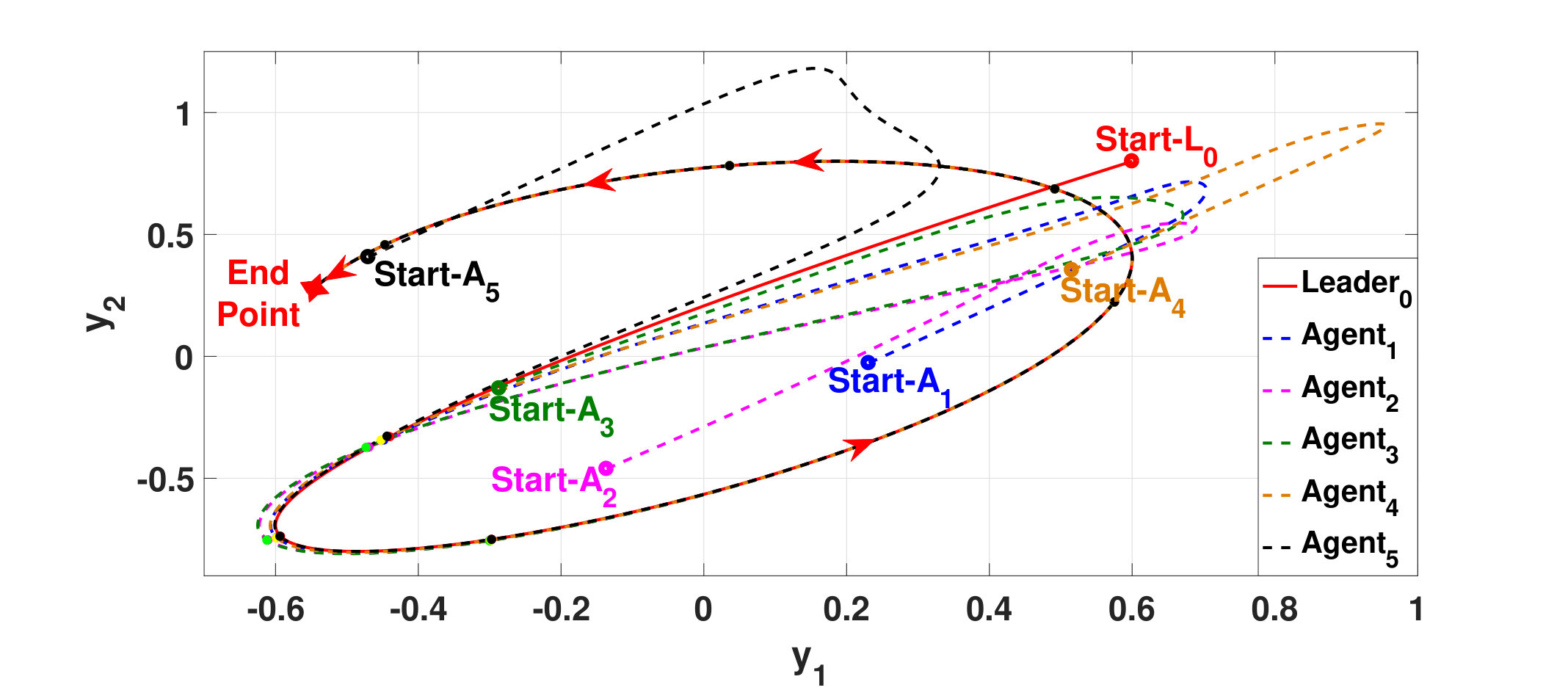 Figure 7
Figure 7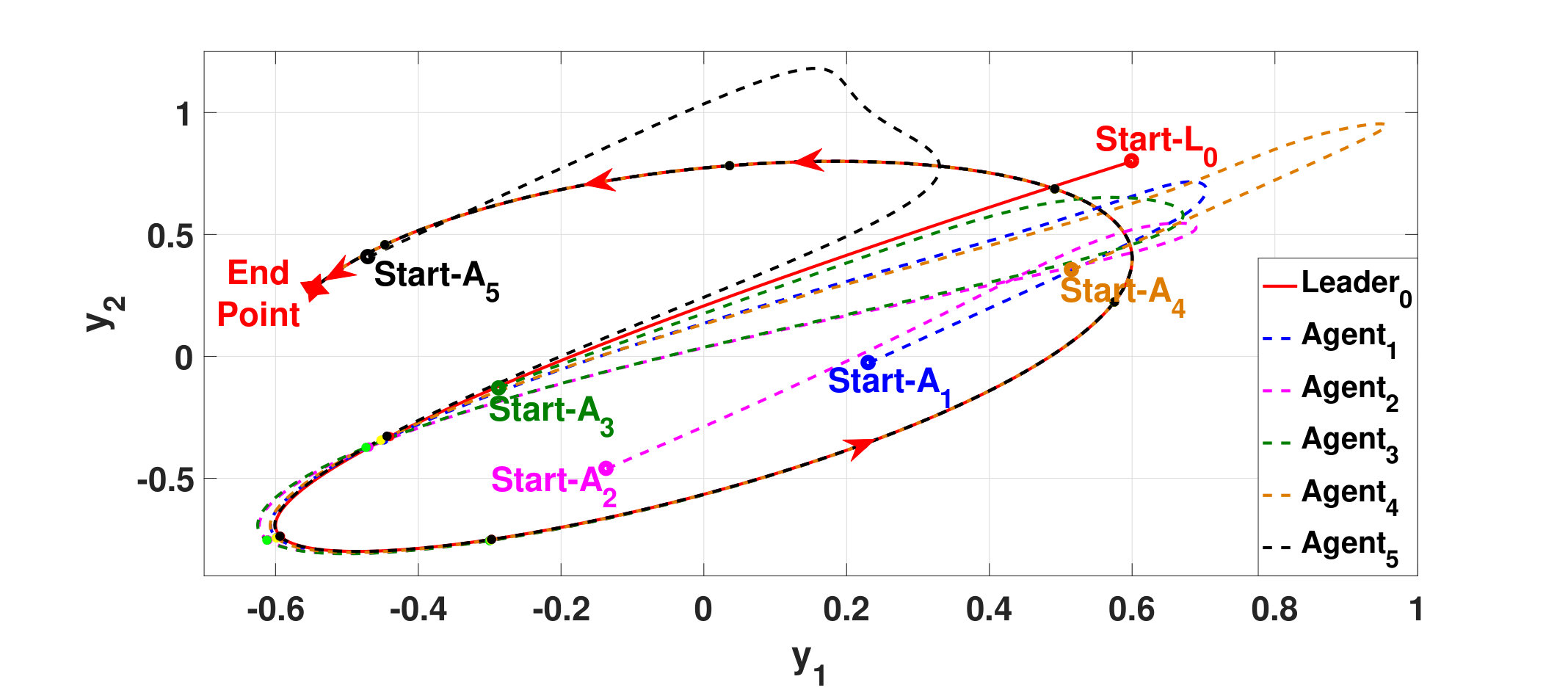 Figure 7
Figure 7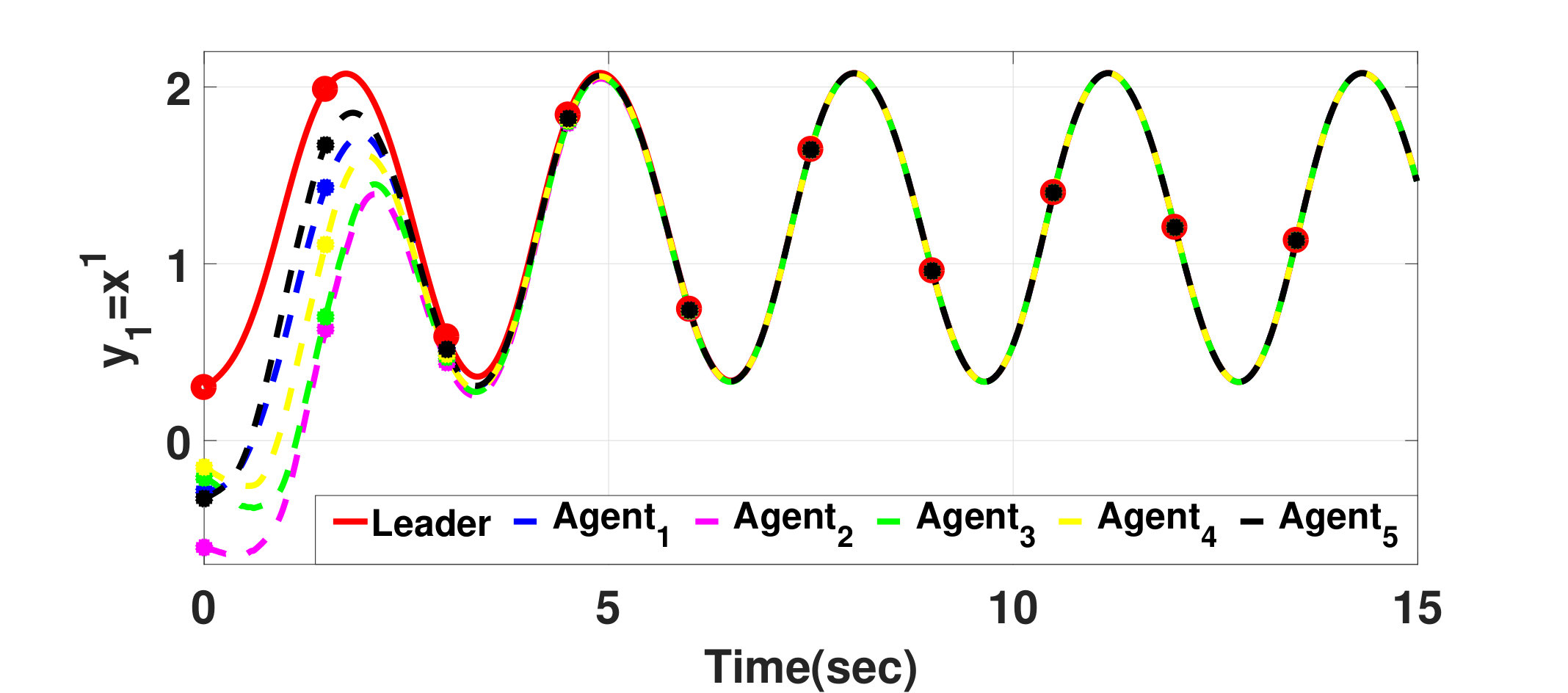 Figure 8
Figure 8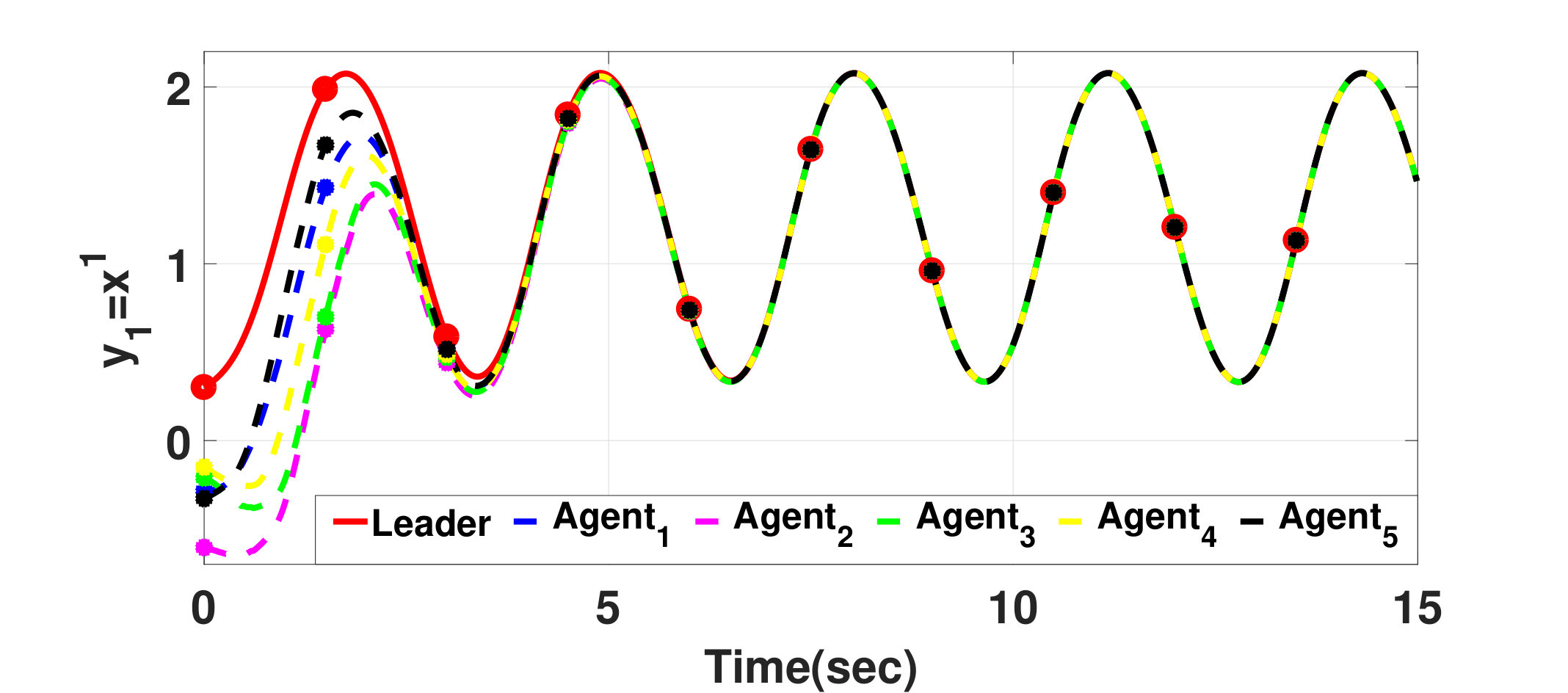 Figure 8
Figure 8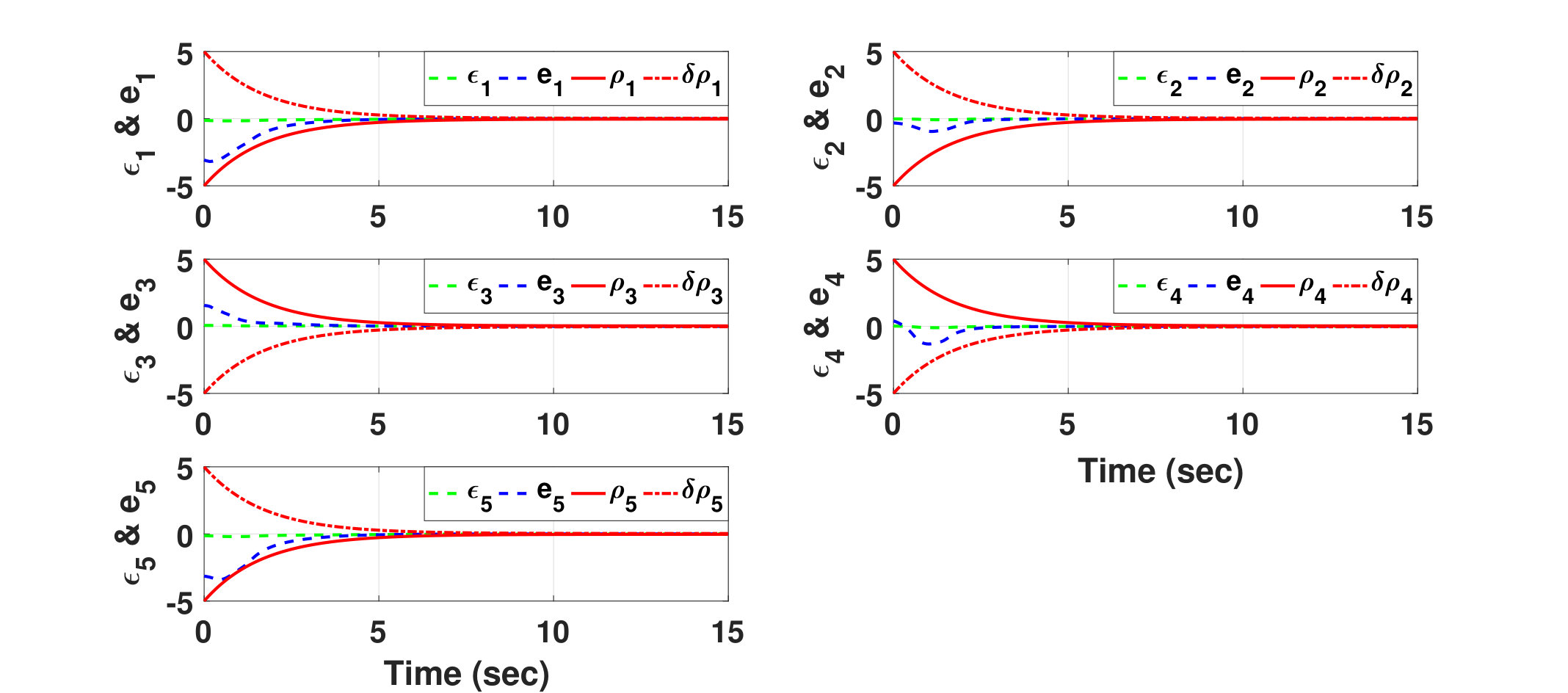 Figure 9
Figure 9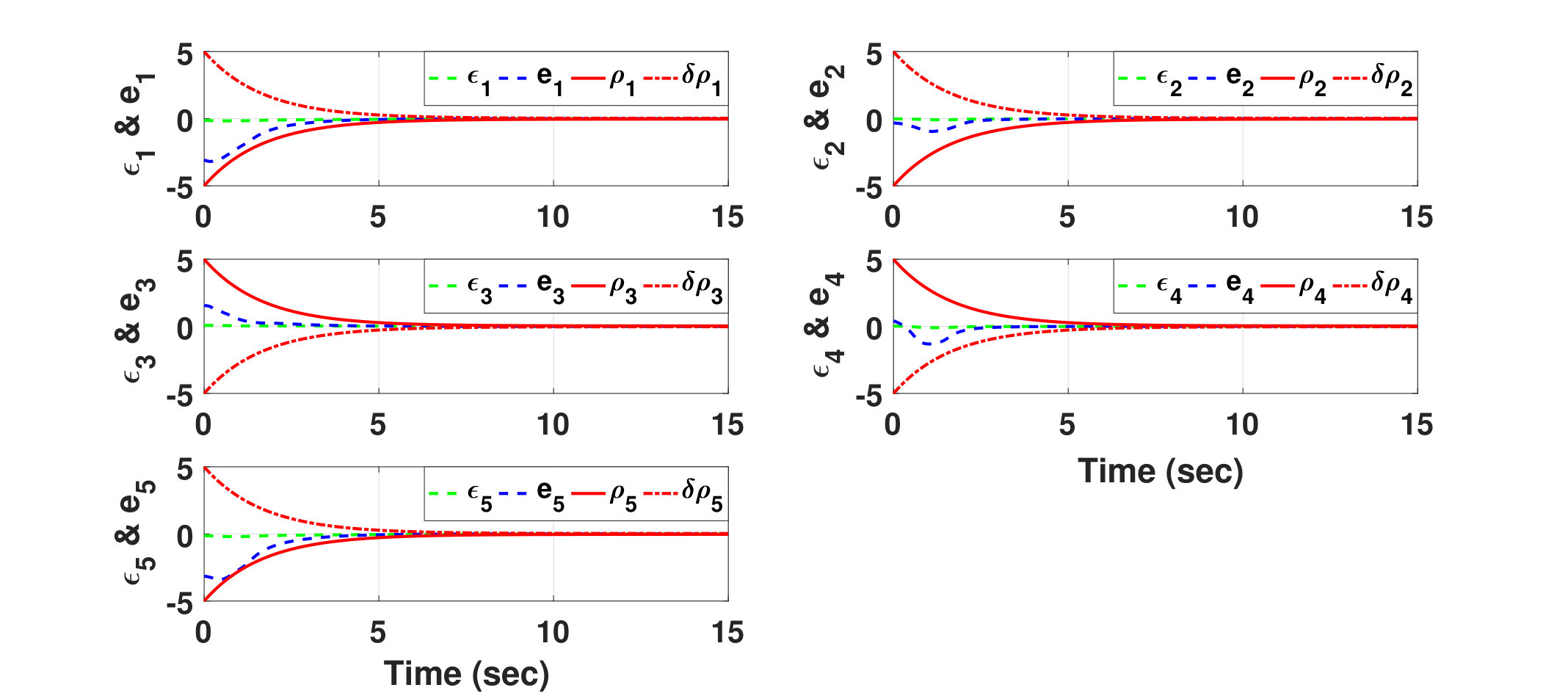 Figure 9
Figure 9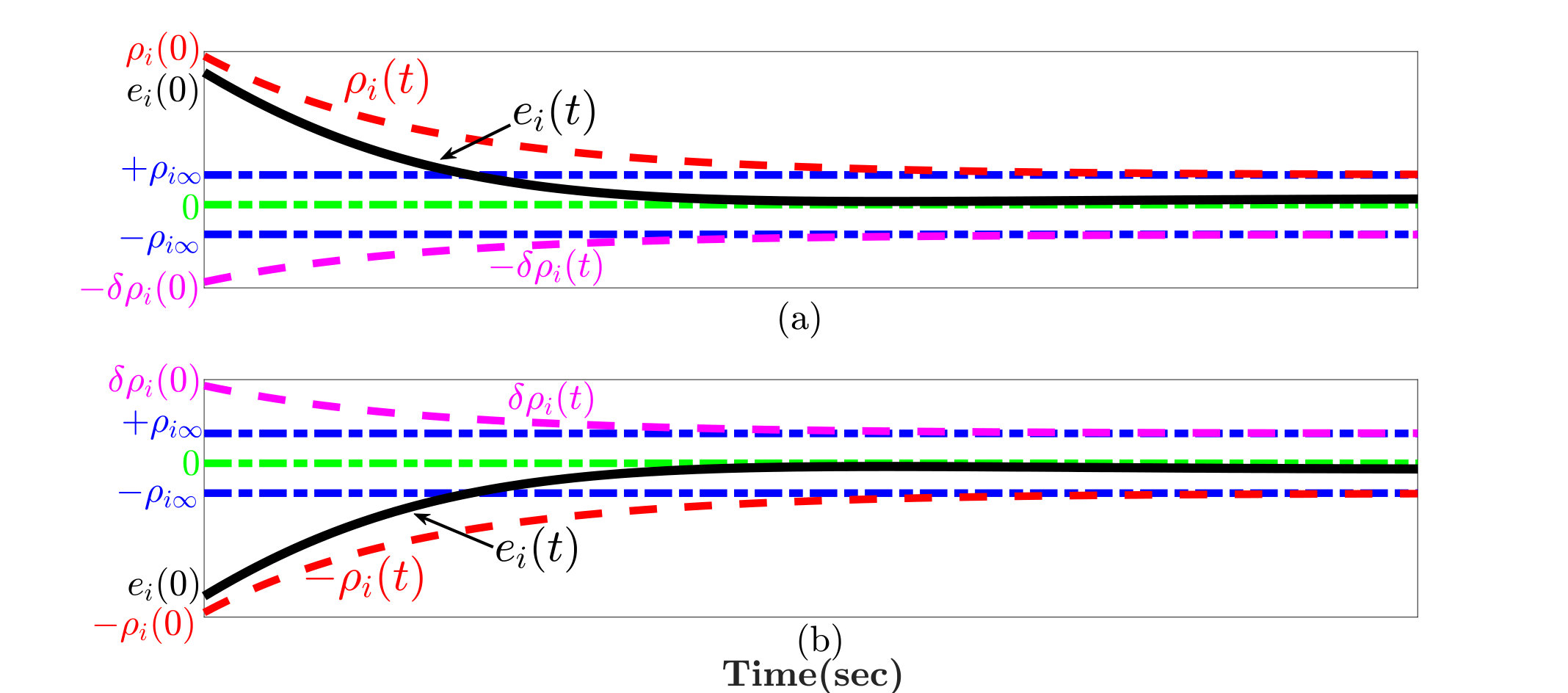 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsDistributed Control Multi-Agent Systems · Neural Networks Stability and Synchronization · Adaptive Control of Nonlinear Systems
Distributed Adaptive Consensus Control of High Order Unknown Nonlinear Networked Systems with Guaranteed Performance
Hashim A. Hashim H. A. Hashim is with the Department of Electrical and Computer Engineering, Western University, London, ON, Canada, N6A-5B9, (e-mail: [email protected])
Abstract
Adaptive cooperative tracking control with prescribed performance function (PPF) is proposed for high-order nonlinear multi-agent systems. The tracking error originally within a known large set is confined to a smaller predefined set using this approach. Using output error transformation, the constrained system is relaxed and mapped to an unconstrained one. The controller is conceived under the assumption that the agents’ nonlinear dynamics are unknown and the perceived network is structured and strongly connected. Under the proposed controller, all agents track the trajectory of the leader node with guaranteed uniform ultimately bounded transformed error and bounded adaptive estimate of unknown parameters and dynamics. In addition, the proposed controllers with PPF are distributed such that each follower agent requires information between its own state relative to connected neighbors. Proposed controller is validated for robustness and smoothness using highly nonlinear heterogeneous networked system with uncertain time-varying parameters and external disturbances.
Index Terms:
Prescribed performance, neuro-adaptive, high order, Transformed error, Multi-agents, Distributed control, Consensus, Synchronization, Transient, Steady-state error, MIMO, SISO.
I Introduction
Biological behavioral analogies such as bees swarming, birds flocking, ants foraging, fish schooling have sprung up researchers’ interest in distributed cooperative control (DCC) and its applications. DCC employs the divide-and-conquer mechanism to collaborate on tasks that are too complicated and time-consuming for individual agent. In addition, agents collaborate to enhance performance and productivity by exchanging information in manners present in social settings.
DCC is of paramount importance in many applications such as autonomous mobile robot vehicles control, energy and mineral explorations, surveillance, space explorations, just to mention a few. For the purpose of useful information exchange, agents are networked and referred to as nodes. A group of agents follows at least one real or virtual leader. The network of these nodes can be modeled as a directed or undirected graph. In undirected graphs, the relationship between two adjacent nodes is mutual and information flows in a bi-directional fashion. When the direction of information flow is not necessarily bi-directional, the term directed graph (or simply digraph) is conventionally used. In directed graphs, direction of the flow of information between a node and its neighbors is explicitly defined.
Design of DCC and multi-agent systems consensus in general was originally introduced in [1, 2] and has since then gone through many layers of advancement. Several studies have focused on addressing several research gaps such as node cooperative tracking problem [3] and consensus of passive nonlinear systems [4]. Linear heterogeneous agents with multiple-input-multiple-output (MIMO) dynamics and parameter uncertainties have been considered and controlled in a distributed fashion [5]. In addition, cooperative tracking control problems have been addressed for both single node with first-order dynamics [6, 7, 8] and high-order dynamics [9, 10]. Unknown nonlinear heterogeneous agents connected via a digraph and under a neuro-adaptive distributed control scheme have also been considered [6, 9, 11, 8].
It is worth mentioning that most of the aforementioned studies assume known input in the node dynamics. To address this shortcoming, many studies have developed cooperative tracking control for systems with unknown input function [12, 13]. Neuro-adaptive-fuzzy-based cooperative tracking control was used to approximate unknown nonlinear dynamics and input functions [12]. The choice of output membership functions’ centroid was solely based on offline trials. One common assumption to many of the previous studies is that they mostly consider unknown nonlinear dynamics and input function with parameter linearity [14, 13] with the objective of ensuring ultimate stability of the tracking error.
Owing to these shortcomings, prescribed performance framework will be beneficial for guaranteeing desired performance. Prescribed performance framework has been used in many control applications in recent time. Multi-agent distributed control in a way addresses many problems such as nonlinearities, unmodeled dynamics, uncertainties, and disturbances. It is often conceived that closed loop characteristics (transient and steady state error for instance) are analytically rigorous [15, 7, 11]. With prescribed performance however, such characteristics have been mapped to a relatively smaller set with constrained convergence. In prescribed performance approach, error is transformed from a space that is constrained into unconstrained one. Some of many objectives of this method are that error of convergence must be lesser than predefined value, prescribed constant bounds the maximum overshoot, smooth system’s output, boundedness and smoothness of control signal is guaranteed, and boundedness of error [15, 7, 11]. Details about prescribed performance is giving in subsequent section.
Cooperative control with prescribed performance for multi-agent systems is beneficial because it ensures that the consensus output error starts in a large predefined set with steady convergence into a narrow set that is predefined [15, 7, 11]. The transient and steady-state consensus tracking errors are in conformity with a known time-varying performance. Adaptive cooperative control with prescribed performance is capable of improving the robustness and lowering the control effect. By carefully selecting the upper and lower bounds of the prescribed performance functions, the error converges inside a preset bounds.
The application of prescribed performance scheme with neural approximation including strict-feedback systems [15, mohamed_improved_2014] and large-scale systems with time delays [16] have been addressed in recent studies. Several studies considered adaptive prescribed performance based on neural network such as [15]. A vast majority of these studies were based on the assumptions that input matrix continuity is continuous. Significant improvements have been made by replacing neural network with trial and error hyper-parameter tuning for controller design with prescribed performance based on model reference adaptive control [mohamed_improved_2014].
This paper proposes a robust adaptive distributed control with prescribed performance for a group of agents with high order nonlinear dynamics connected through a directed communication graph with known topology. The proposed control law is fully distributed in the sense that only local neighborhood information is accessible to each node. Also, the control law of each node is designed to preserve the network topology and communications from the leader do not propagate to all the nodes. In this work, and matrices characterize the general network framework. The imposed predefined characteristics confine the nodes synchronization error in conformity with the prescribed performance. The dynamics of the nodes are unknown, nonlinear, and with time-varying uncertainties. The controller for each node is conceived with predefined transient and steady-state requirements. The proposed ensures stable dynamics and control signal that is bounded and smooth. This paper considerably expands the scope of single-order nonlinear nodes considered in [Hashim2017adaptive] to high order dynamics.
The rest of the paper is structured as follows: Section II presents preliminaries of math notations and graph theory. Problem and local error synchronization formulations are presented in Section III. Prescribed performance is introduced in Section IV. Section V formulates the control law and stability proof of the connected graph. Simulations results are detailed in Section VI. Finally, conclusions are drawn with future work in Section VII.
II Mathematical Identities And Basic Graph Theory
II-A Math Notations and Identities
Throughout this paper, the set of real numbers is denoted as ; -dimensional vector space as ; the space span by matrix as ; identity matrix of order as ; absolute value as . For , the Euclidean norm is given as and matrix Frobenius norm is given as . For any we have for and for we have for . Trace of associated matrix is denoted as , is the set , and is a unity vector . is said to be positive definite if for ; indicates positive semi-definite; is the set of singular values of a matrix with maximum value and minimum value .
II-B Basic Graph Theory
denotes a graph with a nonempty finite set of nodes (or vertices) , and set of edges (or arcs) . if an edge exists from node to node . The structure or topology of weighted graph is represented using the adjacency matrix with weights if and otherwise. It is assumed in this work that the topology is fixed (that is, is time-invariant) and there is no self-connectivity (that is, ). The sum of -th row of , that is, is denoted as the weighted in-degree of a node . Letting the diagonal of in-degree matrix and the Laplacian matrix . The set of node th neighbors of is . Node is said to be node th neighbor if node can get information from node . A sequence of successive edges of the form is a direct path from node to . A digraph is a spanning tree if a direct path exists from the root node to all other nodes within a graph. A strongly connected digraph if for any ordered pair of nodes with , there is direct path from node to node [17, 18].
III Problem Formulation
Consider the following nonlinear dynamics for the th node
[TABLE]
where denotes the th-state of , is number of inputs equal to number of outputs, , is the system order, , and with is number of agents in the graph. is a known control input matrix, is the control signal node with output vector such that . is the unknown but Lipschitz nonlinear vector of dynamics. For simplicity we denote and . The corresponding global dynamics of (1) can be described by
[TABLE]
where , , , , and . The state dynamics of the leader are given as in (3)
[TABLE]
where is the leader state vector, which could be time varying; is the state variable of the leader where ; the leader nonlinear function vector is piece-wise continuous in and locally Lipschitz. The disagreement variable in is and the global disagreement is
[TABLE]
where , . It is assumed that the distributed state information of the communication graph for th node is known. The neighborhood synchronization error is defined as in [19, 20] by
[TABLE]
where , and when agent is a neighbor of agent ; and when one or more agents are neighbors of the leader. , and . Hence, the global error dynamics in (6)
[TABLE]
By re-writing global error dynamics in state vector form gives the expression in (7)
[TABLE]
with bounded reference nonlinear dynamics
. The proof of equation (7) can be found in [15].
Remark 1**.**
The global error dynamics in (6) for MIMO where becomes
[TABLE]
In the same vein as (8), (7) becomes
[TABLE]
where is the Kronecker product and is the identity matrix.
Remark 2**.**
If for at least one with then is an irreducible diagonally dominant matrix M and hence nonsingular [21].
For a strongly connected graph, and
[TABLE]
where is the minimum singular value of .
IV Prescribed Performance
As mentioned earlier, error can be confined using a decreasing function with prescribed features known as the Prescribed Performance Function (PPF) [15]. PPF offers a way of improving the transient behavior and control signal by enforcing certain features on error signal. denotes the main component of PPF which is a smooth positive decreasing function given in (11) such that and hold.
[TABLE]
where is the maximum or the initial value of PPF set, is the minimum or the steady state value of allocated set, and tunes the reduction of set boundaries with respect to time. PPF and error component satisfy the following properties:
[TABLE]
for all , , and . The tracking errors of agents with prescribed performance reduces from a large to a smaller set in accordance with (12) and (13) as shown in Fig. 1. The complete idea of prescribed performance is illustrated in Fig. 1.
Remark 3**.**
As detailed in [15, 7, 11], knowing the sign of is sufficient to maintain the same robust controller for all and satisfy the performance constraints since switching does not occur after .
A transformed error drives the error dynamics from constrained bounds in either (12) or (13) to that in (14) which is unconstrained.
[TABLE]
Subsequently,
[TABLE]
where , and are smooth functions, . For clarity, and are defined accordingly. The smooth function and must satisfy [15]:
- P 1)
is smooth and strictly increasing. 2. P 2)
is bounded between two predefined bounds
3. P 3) 4. \left.\begin{array}[]{c}\underset{\varepsilon_{i}^{p}\rightarrow-\infty}{\lim}\mathcal{F}\left(\varepsilon_{i}^{p}\right)=-\underline{\delta}_{i}^{p}\\ \underset{\varepsilon_{i}^{p}\rightarrow+\infty}{\lim}\mathcal{F}\left(\varepsilon_{i}^{p}\right)=\bar{\delta}_{i}^{p}\end{array}\right\}\text{ if }e_{i}^{p}\left(0\right)\geq 0
\left.\begin{array}[]{c}\underset{\varepsilon_{i}^{p}\rightarrow-\infty}{\lim}\mathcal{F}\left(\varepsilon_{i}^{p}\right)=-\bar{\delta}_{i}^{p}\\ \underset{\varepsilon_{i}^{p}\rightarrow+\infty}{\lim}\mathcal{F}\left(\varepsilon_{i}^{p}\right)=\underline{\delta}_{i}^{p}\end{array}\right\}\text{ if }e_{i}^{p}\left(0\right)<0
where
[TABLE]
The function is given as
[TABLE]
and the transformed error is defined as
[TABLE]
Then is governed by
[TABLE]
where .
From (19), new variable is defined as follows
[TABLE]
Then a metric error is introduced and it is given as in (21) or equivalently in (22).
[TABLE]
[TABLE]
for and . Putting (22) in global form, we have:
[TABLE]
where is a positive constant, , .
With the assumptions that:
[TABLE]
and
[TABLE]
and is Hurwitz, then,
[TABLE]
and
[TABLE]
where is a positive constant, and is the identity matrix with dimension . By considering (7) and (19), then, the derivative of the metric error in (21) is given as
[TABLE]
with . Hence, the global form of (28) is
[TABLE]
where ; ; is the function of higher orders of , . is vanishing because high orders of , vanish, that is, tend to to zero as . Also, and
[TABLE]
is a decreasing positive definite matrix with and its components are defined in (20). The following definitions are also crucial (see [6]).
Definition 1**.**
The global neighborhood error is uniformly ultimately bounded (UUB) if there exists a compact set such that , there exist a bound and a time , both independent at , so that .
Definition 2**.**
The control node trajectory given in (1) is cooperatively UUB with respect to solutions of node dynamics in (3) if there exists a compact set such that , there exist a bound and a time , both independent at , so that , , .
V Adaptive Projection Approximation
The agent nonlinear dynamics in (1) can be approximated as
[TABLE]
with are unknown entities in the model such as uncertainties and external disturbances [7].
Assumption 1**.**
*(Uniform boundedness of the unknown parameters)
Let and of which and are known convex compact sets.*
The unknown nonlinearities of a local node can be approximated by
[TABLE]
Assumption 2**.**
Matrix is known and invertible, that is, exists.
Let and be the approximations of and , respectively. Then the estimation of unknown nonlinearities for a local node is given as
[TABLE]
The estimation error of nonlinearities is thus
[TABLE]
where
[TABLE]
[TABLE]
In this work, subsequent assumptions are considered. It is worthy of note that the values of the estimation bounds are not necessary known.
Assumption 3**.**
[22]**
States of the leader are bounded by . 2. 2.
Dynamics of the leader is unknown and bounded such that . 3. 3.
Unknown parameters are uniformly bounded: and for all .
Lemma 1**.**
[18]** Define
[TABLE]
[TABLE]
Then and the matrix is defined as
[TABLE]
Let the control signal of local node be given as
[TABLE]
such that the global form of the control input in (39) is defined as
[TABLE]
where , and the control gain such that
[TABLE]
and is as defined in (38). The control variable satisfies ,
, , and is as defined in (27) for . The adaptive estimates and are updated according to (42) and (43).
[TABLE]
[TABLE]
with and .
Theorem 1**.**
Let be an irreducible matrix and such that is nonsingular. and are scalar design parameters defined in (41). Consider the distributed system in (1) and the leader dynamics in (3) coupled directly to the control input in (39) with adaptive estimates (42) and (43). If Assumptions 2 and 3 hold and the distributed control is as in (40). Then, the control node trajectory is cooperatively UUB and all nodes synchronize close to .
Proof.
Based on (38) in Lemma 1, the error function in (7) then becomes
[TABLE]
and can be rewritten as
[TABLE]
and from (29), the transformed error then yields
[TABLE]
By considering the following Lyapunov candidate function
[TABLE]
with is defined in Lemma 1, were mentioned in (42) and (43), respectively, such that , and strictly positive. Let , , and be defined in (46) and and are block diagonal matrices as in (42) and (43), respectively. For simplicity, let . After algebraic manipulations and substitution of (42) and (43),
[TABLE]
∎
[TABLE]
since and , one can write (48) as
[TABLE]
Note that , , then can be written as
[TABLE]
Also, and and by substituting (27) with (50), we end up with
[TABLE]
then can be rewritten in inequality form using the second norm as
[TABLE]
Also, from (24), (25) and (46), the derivative of the fourth Lyapunov term is defined by
[TABLE]
substituting (26) in (53) yields
[TABLE]
Now, we put (52) and (54) in the complete form
[TABLE]
with
[TABLE]
Let us define
[TABLE]
hence, the inequality in (56) can be expressed as
[TABLE]
Define , and
[TABLE]
such that (57) can be written in simpler form as
[TABLE]
then, we have if and only if is positive definite and
[TABLE]
According to Sylvester’s criterion, if
2. 2.
3. 3.
4. 4.
Solving the foregoing equations show (41)
[TABLE]
Then, with the assumption that
[TABLE]
we have if . In accordance with (46), we have
[TABLE]
By defining appropriate matching variables, (61) becomes
[TABLE]
which is equivalent to
[TABLE]
then,
[TABLE]
Hence, based on Theorem 4.18 in [23], for any the initial value there exists such that
[TABLE]
where time is evaluated using
[TABLE]
Also from (66), we have the relations
[TABLE]
Then, equation (57) can be written as
[TABLE]
with and leading to
[TABLE]
Therefore is and contained for in the compact set as stated in Theorem 1. Hence, will satisfy the prescribed performance if we start at within the prescribed functions.
Remark 4**.**
(Notes on control design parameters) and define the dynamic boundaries of the initial (large) and final (small) set and they have a significant impact on the control effort up to small error tracking which is bounded by . Higher values of and require more time for the systematic convergence from large to small set. Whereas, the impact of can be noticed on the speed of convergence from large to small sets that implies values of has a direct impact on the range of control signal. It should be remarked that and are associated with nonlinearity compensation of adaptive estimate, controls the speed of convergence to the desired tracking output and has to be selected to satisfy (41). The bounds on local consensus modified errors can be made small by increasing the control gains .
Finally, the algorithm of nonlinear high order agent dynamics such as equation (1) can be summarized briefly as
- Step 1.
Select the control design parameters such as , , , , , and . 2. Step 2.
Evaluate local error synchronization from equation (5). 3. Step 3.
Evaluate the prescribed performance function from equation (11). 4. Step 4.
Evaluate from equation (20). 5. Step 5.
Evaluate the transformed error from equation (18) starting from to . 6. Step 6.
Evaluate the metric error from (21) or (22). 7. Step 7.
Evaluate control signal from equation (39). 8. Step 8.
Evaluate the adaptive estimates and from equations (42) and (43), respectively. 9. Step 9.
Go to Step 2.
VI Simulation Results
In this section, we present two different examples to illustrate the robustness of the proposed controller. The first example considers single-input single-output (SISO) problem and the second example present multi-input multi-output (MIMO) problem with high order dynamics. Consider a connected network is composed of 5 agents denoted by 1 to 5 with one leader denoted by 0 and the leader node is connected to agents 1 and 5 as in Fig. 2.
Example 1 (SISO): Let the graph in Fig. 2 be SISO with high order nonlinear dynamics such as
[TABLE]
such that with nonlinear dynamics
[TABLE]
and the leader dynamics is
[TABLE]
The setting parameters in this problem were selected as , , , , , , , , . is the initial vector of the nonlinear leader system, and the values of agents are
[TABLE]
Fig. 3 presents the output performance of the proposed control and it shows smooth tracking performance for . It can be noticed that the networked system with unknown high nonlinear dynamics converged smoothly to the leader trajectory in the presence of high nonlinearities and time-varying disturbances. Fig. 4 illustrates the systematic convergence of the synchronized error for satisfying the predefined constraints and setting parameters imposed on the system. In fact, Fig. 4 shows how the error started from a predefined large set and reduced systematically into the predefined small set prescribed by the value of . Moreover, Fig. 4 presents transformed error associated to agent .
Example 2 (MIMO Problem): Consider the graph in Fig. 2 and let each agent be defined by a second order system with 2 inputs and 2 outputs with high nonlinear dynamics. The nonlinear dynamics are defined by
[TABLE]
where
[TABLE]
[TABLE]
[TABLE]
and
[TABLE]
where is system nonlinearity, and are time variant disturbances of the associated agent . Also, the correspondent nonlinear and time variant disturbance components , and are assumed to be completely unknown. It can be noticed that we considered , , , for and . The leader dynamics is selected to be . The control parameters of the problem were defined as , , , , , , , , . Initial conditions of , , , , and the derivative of states is where ”randn” is a command in denotes normal random distribution. It can be noticed that we considered different initial conditions such that , for and .
The robustness of the proposed controller against time variant uncertain parameters, time variant external disturbances, and high nonlinearities are tested. Fig. 5 shows the output performance of the proposed controller for this MIMO case. The output performance demonstrate impressive smooth tracking performance of the follower agents for to the leader agent . The control input of system dynamics in the connected graph is demonstrated in Fig. 6. The tracking errors and their associated transformed errors are depicted in Fig. 7 and 8. The initial errors of and e_{i2}$$\left(0\right) satisfy the static boundaries that were defined initially by and . The transient errors and for satisfy the dynamic boundaries which can be represented by and , respectively. Finally, the errors are successfully trapped between and for and . In fact, Fig. 5, 6, 7, and 8 illustrate the effectiveness and robustness of the proposed distributed adaptive control with prescribed performance characteristics of the high order unknown nonlinear networked systems. The phase plane is presented in Fig. 9.
VII Conclusion
A distributed cooperative adaptive control of high order nonlinear multi-agent systems with prescribed performance has been proposed. We considered the nonlinearities of the agents to be Lipschitz but completely unknown. Adaptive estimates has been used to estimate the system’s nonlinearities and uncertainties. The controller has been developed for strongly connected digraph. The control signal has been chosen properly to ensure UUB stability of the synchronization errors. The controller successfully brought the agents from random initial values and synchronized their outputs to the desired trajectory within the prescribed performance constraints. Simulation examples included highly nonlinear heterogeneous systems with time varying parameters, uncertainties and disturbances.
Acknowledgment
The author would like to thank Babajide O Ayinde for providing helpful comments that greatly improved the manuscript and for his assistance that made this work possible.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] J. A. Fax and R. M. Murray, “Information flow and cooperative control of vehicle formations,” IEEE Transactions on Automatic Control , vol. 49, no. 9, pp. 1465–1476, 2004.
- 2[2] W. Ren, R. W. Beard, and others, “Consensus seeking in multiagent systems under dynamically changing interaction topologies,” IEEE Transactions on automatic control , vol. 50, no. 5, pp. 655–661, 2005.
- 3[3] R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and cooperation in networked multi-agent systems,” Proceedings of the IEEE , vol. 95, no. 1, pp. 215–233, 2007.
- 4[4] N. Chopra and M. W. Spong, “Passivity-based control of multi-agent systems,” in Advances in robot control . Springer, 2006, pp. 107–134.
- 5[5] Y. Zhao, Z. S. Duan, G. H. Wen, Z. K. Li, and G. R. Chen, “Fully distributed tracking control for non-identical multi-agent systems with matching uncertainty,” International Journal of Adaptive Control and Signal Processing , vol. 29, no. 8, pp. 1024–1037, 2015.
- 6[6] A. Das and F. L. Lewis, “Distributed adaptive control for synchronization of unknown nonlinear networked systems,” Automatica , vol. 46, no. 12, pp. 2014–2021, 2010.
- 7[7] H. A. Hashim, S. El-Ferik, and F. L. Lewis, “Adaptive synchronisation of unknown nonlinear networked systems with prescribed performance,” International Journal of Systems Science , vol. 48, no. 4, pp. 885–898, 2017.
- 8[8] S. El-Ferik, H. A. Hashim, and F. L. Lewis, “Neuro-adaptive distributed control with prescribed performance for the synchronization of unknown nonlinear networked systems,” IEEE Transactions on Systems, Man, and Cybernetics: Systems , vol. 48, no. 12, pp. 2135–2144, 2018.