Modified Covariance Intersection for Data Fusion in Distributed Non-homogeneous Monitoring Systems Network
Abolghasem Daeichian, Elham Honarvar

TL;DR
This paper introduces a modified covariance intersection method tailored for data fusion in non-homogeneous distributed monitoring networks, improving object detection and tracking accuracy.
Contribution
It develops a novel fusion approach based on a game-theoretic formulation considering node heterogeneity, enhancing data integration in complex monitoring systems.
Findings
Effective in one-target scenarios
Handles unknown number of targets
Improves tracking accuracy
Abstract
Monitoring networks contain monitoring nodes which observe an area of interest to detect any possible existing object and estimate its states. Each node has characteristics such as probability of detection and clutter density which may have different values for distinct nodes in non-homogeneous monitoring networks. This paper proposes a modified covariance intersection method for data fusion in such networks. It is derived by formulating a mixed game model between neighbor monitoring nodes as players and considering inverse of the trace of fused covariance matrix as players' utility function. Monitoring nodes estimate the states of any possible existing object by applying joint target detection and tracking filter on their own observations. Processing nodes fuse the estimated states received from neighbor monitoring nodes by the proposed modified covariance intersection. It is validated…
Click any figure to enlarge with its caption.
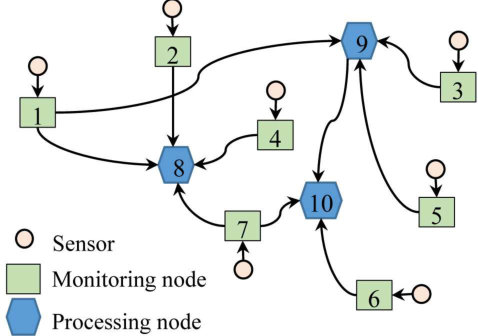 Figure 1
Figure 1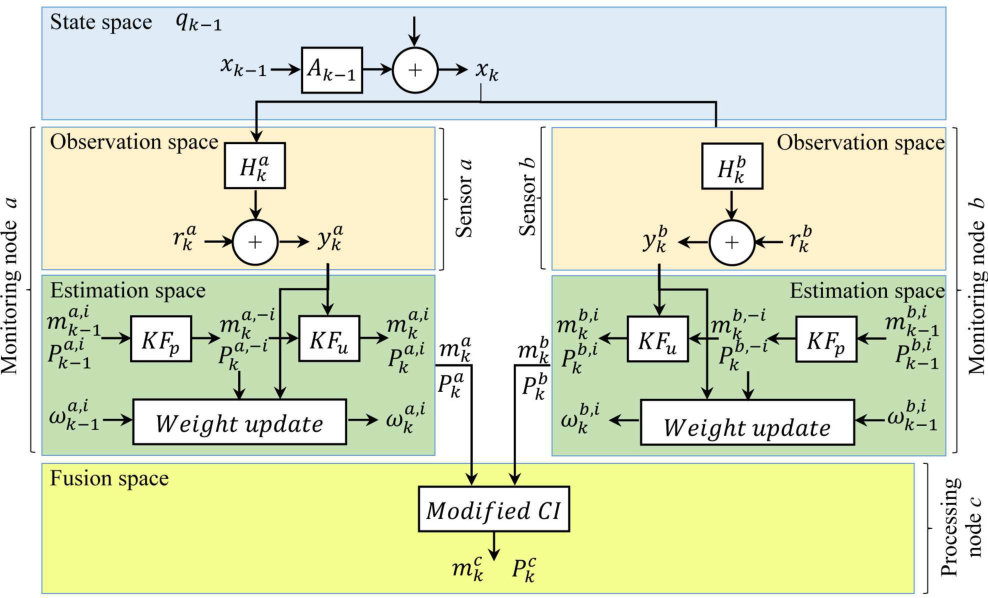 Figure 2
Figure 2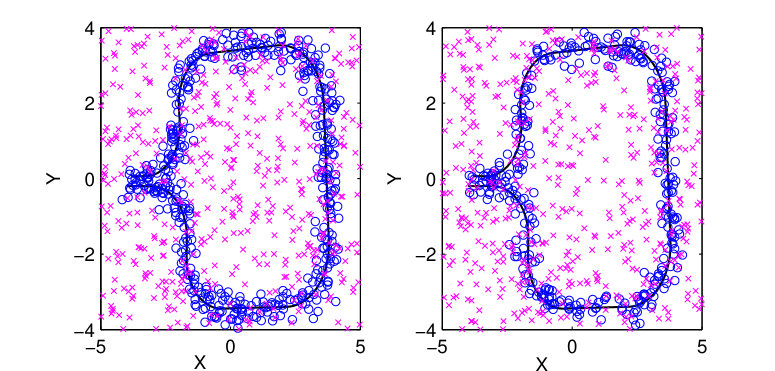 Figure 3
Figure 3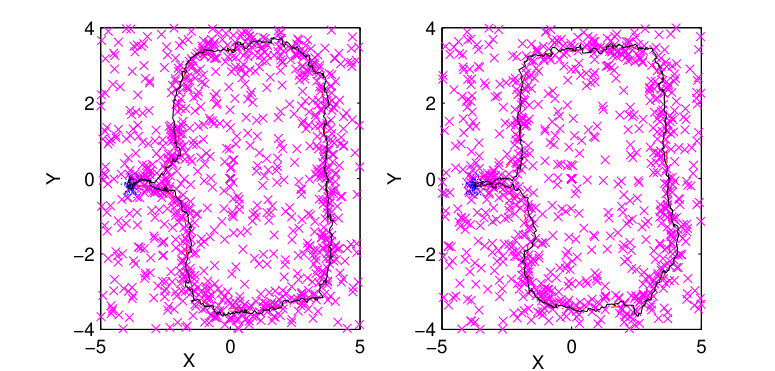 Figure 4
Figure 4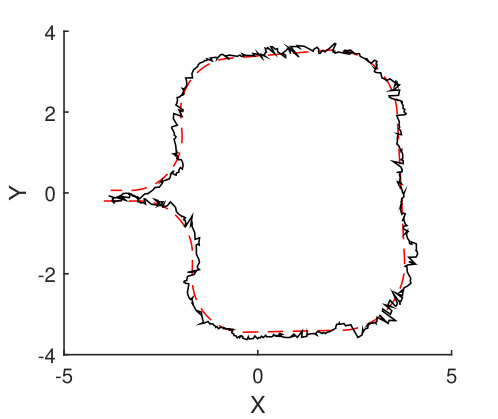 Figure 5
Figure 5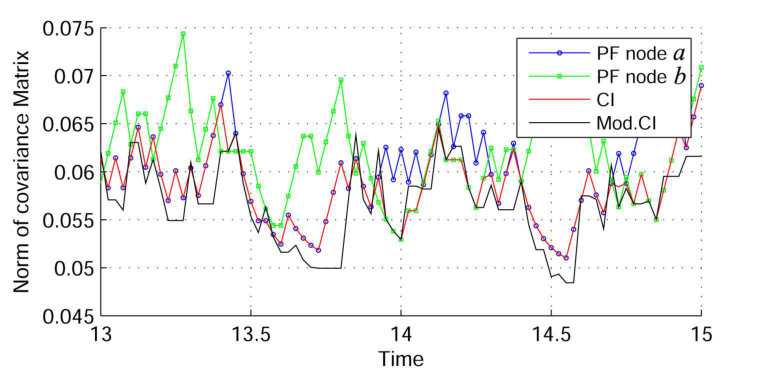 Figure 6
Figure 6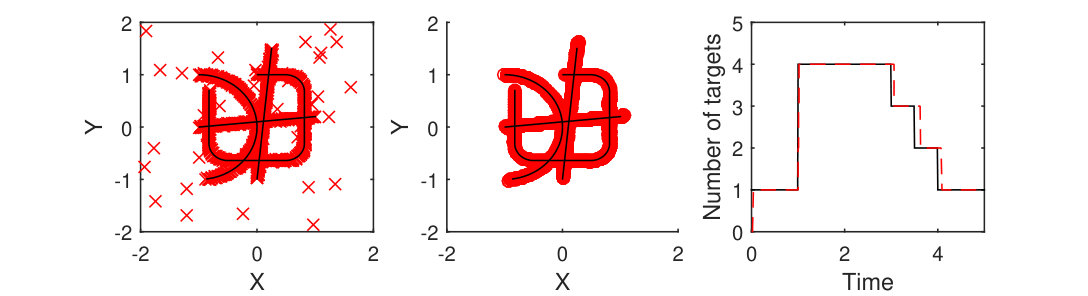 Figure 7
Figure 7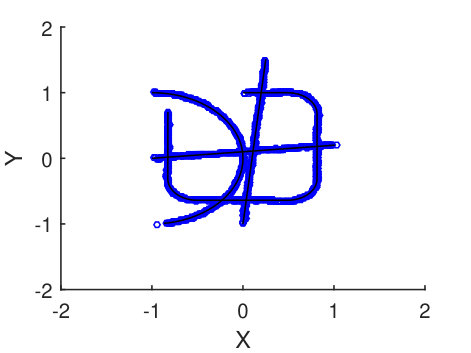 Figure 8
Figure 8| Data fusion | Node b (Player 2) | ||
|---|---|---|---|
| Game | |||
| Node a | |||
| (Player 1) | |||
| Filtering Method | MSE | MNCM |
|---|---|---|
| Kalman (node ) | 1.447 | - |
| Kalman (node ) | 1.613 | - |
| RBPF (node ) | 0.141 | 0.0632 |
| RBPF (node ) | 0.161 | 0.0666 |
| CI | 0.141 | 0.0613 |
| Modified CI | 0.109 | 0.0592 |
| Node number | Algorithm | MSE () | MNCM |
|---|---|---|---|
| 1 | RBPF | 0.1430 | 0.0578 |
| 2 | RBPF | 0.4716 | 0.0616 |
| 3 | RBPF | 0.1228 | 0.0533 |
| 4 | RBPF | 0.1830 | 0.0580 |
| 5 | RBPF | 0.1010 | 0.0511 |
| 6 | RBPF | 0.1166 | 0.0529 |
| 7 | RBPF | 0.1912 | 0.0556 |
| 8 | CI | 0.0821 | 0.0508 |
| 9 | CI | 0.0731 | 0.0560 |
| 10 | CI | 0.0884 | 0.0505 |
| 8 | Modified CI | 0.0784 | 0.0501 |
| 9 | Modified CI | 0.0763 | 0.0523 |
| 10 | Modified CI | 0.0799 | 0.0493 |
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
††thanks: This is the peer reviewed version of the following article: Daeichian, Abolghasem, and Elham Honarvar. ”Modified covariance intersection for data fusion in distributed nonhomogeneous monitoring systems network.” International Journal of Robust and Nonlinear Control 28.4 (2018): 1413-1424., which has been published in final form at DOI: 10.1002/rnc.3964. This article may be used for non-commercial purposes in accordance with Wiley Terms and Conditions for Use of Self-Archived Versions.
Modified Covariance Intersection for Data Fusion in Distributed Non-homogeneous Monitoring Systems Network
Abolghasem Daeichian
E-mail:[email protected], [email protected]
Department of Electrical Engineering, Faculty of Engineering, Arak University, Arak, 38156-8-8349 Iran
Elham Honarvar
Payam Nonprofit Higher Education Institute, Golpayegan, Iran
Abstract
Monitoring networks contain monitoring nodes which observe an area of interest to detect any possible existing object and estimate its states. Each node has characteristics such as probability of detection and clutter density which may have different values for distinct nodes in non-homogeneous monitoring networks. This paper proposes a modified covariance intersection method for data fusion in such networks. It is derived by formulating a mixed game model between neighbor monitoring nodes as players and considering inverse of the trace of fused covariance matrix as players’ utility function. Monitoring nodes estimate the states of any possible existing object by applying joint target detection and tracking filter on their own observations. Processing nodes fuse the estimated states received from neighbor monitoring nodes by the proposed modified covariance intersection. It is validated by simulating target detection and tracking problem in two situations: one-target and unknown number of targets.
data fusion, covariance intersection, target detection and tracking, game theory.
I Introduction
Precision promotion and cost reduction for detection and tracking of moving objects (targets) in a noisy environment is a challenging problem. Nowadays, distributed monitoring networks are extensively used in target detection and tracking in both civilian and military applications due to providing scalability, flexibility, low operation cost, and diversity in viewing geometry and phenomenology dong2014distributed ; bocca2014multiple . Monitoring networks consist of monitoring nodes, processing nodes (fusion center), and communication links. Monitoring nodes contain sensors which constantly measure some features in the interested space. The measurements are used to detect and track any possible existing object which results in an estimation of its states. Processing nodes fuse estimations of two or more monitoring nodes which are received through communication links in order to give more precise information. Monitoring nodes may connect to processing nodes in different topologies; for example, centralized topology which is theoretically optimal but has some disadvantages such as high bandwidth reqirement for collecting all measurements in a single node, high computation load at a single location, high power consumption, and low robustness due to a single point of failure. Decentralized or distributed data fusion is an alternative topology which consists of multi local processing nodes ding2014recent .
Object tracking consists of detecting and then tracking an object ulker2012multiple ; morelande2007bayesian . A unified target detection and tracking has been introduced as joint target detection and tracking (JoTT) filter to track a target which has Gaussian bazzazzadeh2009optimal or Bernoulli mahler2007statistical ; vo2014labeled characteristics. Exact computing of probability density is a drawback of this method. Monte-Carlo or particle filter techniques tackle this disadvantage due to their capability of approximating a probability density efficiently by a cloud of weighted particles olsson2011rao ; han2013particle ; li2015multiple . Rao-Blackwellized particle filtering (RBPF) is an extension on particle filter that not only gives data associations and estimation of target states, but also model births and deaths of the targets as hidden stochastic processes observed through the measurements sarkka2007rao . In the situation of unknown number of targets, several factors such as number of targets, corrupted measurements by clutter, and target appearance-disappearance from time to time must be considered ulker2012multiple . A difficulty of unknown-target joint detection and tracking is due to the fact that number of targets and measurements both vary randomly in time. Thus, it is not clear that each measurement is generated by which target vo2004joint . Some researches such as oh2004markov ; oh2009markov cope with this conundrum.
Distributed data fusion (DDF) and filtering algorithms are the key components of any target tracking system durrant2005data . Data fusion techniques merge data from multiple sensors and related information to provide more accurate and applicable data in comparison with using a single, independent sensor waltz1990multisensor ; khaleghi2013multisensor . This allows either improved accuracy from existing sensors or the same performance from smaller or cheaper sensors. Improving the observability and developing the observation space are another advantages of multi distributed sensor data fusion ahmed2013bayesian . Unknown degree of correlation between estimates obtained from different monitoring nodes and double counting of the information that is previously used (redundant information) within an ad-hoc network topology are some challenges in practical implementation of DDF. Covariance Intersection (CI) presents suboptimal data fusion algorithm which addresses these challenges and avoids the assumption of independence of estimates required by traditional Bayesian filters Data fusion chen2002estimation ; liggins2008handbook . CI conducts fusion process by weighting the estimates of any monitoring node using a mixing parameter . Usually, mixing parameter is found such that minimizing the trace (or determinant) of the fused covariance matrix which is equivalent to minimizing the Shannon entropy of the fused covariance matrix hurley2002information . An iterative extension of the CI for DDF is given in hlinka2014distributed which converges asymptotically to a consensus across all network nodes. A batch CI scheme is presented in sun2016distributed to handle the unknown cross-correlation in DDF by means of an average consensus algorithm.
In many applications, monitoring nodes have different characteristics, capabilities, or with different levels of trust, i.e. non-homogeneous nodes. For instance, Network Centric Warfare (NCW) requires a sensor network which collects and fuses vast amount of disparate and complementary data from different non-homogeneous sensors that are geographically dispersed throughout the battle space julier2006challenge ; smith2006approaches . Some investigations try to deal with this challenge and keep away from the assumption of homogeneity of sensors. For example, a method for optimizing the mixing parameter to minimize information lost during fusion in a network with different measurement covariance matrix for each sensor is presented in clarke2016minimum . In particular, optimality of fusion rules implemented in detection and tracking systems usually relies on probability of detection, clutter density and knowledge of probability distributions for all distributed sensors aziz2014new ; smith2006approaches .
This paper proposes a modified CI for data fusion in a non-homogeneous distributed monitoring network. Difference between detection parameters of distinct nodes such as probability of detection take into account in data fusion algorithm. To this end, a mixed game is articulated between two distinct monitoring nodes and as players and inverse of trace of fused covariance matrix as their utility function. Matching the utility function of the game with traditional CI leads to a modified CI which the accuracy of its fused estimates outperforms the traditional CI in the sense of fused covariance matrix. The modifies CI is also extended for more than two nodes. Detection and tracking in two circumstances (one target and unknown number of targets) in a cluttered environment are investigated to validate the proposed method. An interested space is observed by non-homogeneous monitoring nodes. The RBPF is employed to estimate target states in each node. The estimated states are transmitted to neighbor processing nodes via communication links. The received estimates are fused by the proposed modified-CI in processing nodes. The simulation results are compared with Kalman filter, particle filter, and traditional CI to verify utility of the proposed method.
The paper is folded as follows. Problem is stated in section II. RBPF and RBMCDA algorithms for target detection and tracking are reviewed in section III. Section IV is devoted to representation of the proposed method. Simulation results are given in section V. Finally, the paper is concluded in section VI.
II Problem statement
Let a network of distributed and non-homogeneous monitoring nodes observe an area of interest to find targets with states at time ; e.g. see Fig.1. Each monitoring node has its own probability of detection, density of clutter, and measurements of the target state , in vector at time . They estimate mean () and covariance () of the states of any observed object using joint target detection and tracking filter.
The estimates are sent to neighbor processing nodes through communication links. Processing nodes fuse received data to yield more accurate estimation. Different values for detection parameters such as probability of detection for each monitoring node may corrupt the outcome of fusion process. This paper concerns on how data fusion could be performed by considering non-homogeneity of monitoring node parameters, especially in detection parameters.
Consider the dynamic of target states as:
[TABLE]
and sensor measurement model as:
[TABLE]
where and are states and measurements noise, respectively. This kind of noise suppose to be finite second moment stochastic processes with covariance matrices and , respectively. Let be data association indicator where represents the clutter and indicates target number . Clutter is supposed to distribute in the measurement space of volume uniformly. Therefore, the probability of observing conditioned on clutter is
[TABLE]
This paper employs RBPF for target detection and tracking in monitoring nodes and proposes a modified covariance intersection for data fusion in processing nodes.
III Rao-blackwellized particle filtering
Rao-blackwellized particle filtering (RBPF) is used for target tracking in a cluttered environment sarkka2007rao . The RBPF divides tracking problem into data association problem and tracking single target problem. Data association and tracking are done by sequential importance resampling (SIR) and Kalman filter, respectively. This section briefly reviews the RBPF from sarkka2007rao ; sarkka2004rao where one or unknown number of targets are in the area of interest.
III.1 One target scenario
In this situation, suppose that only one target and clutter exist in the observed area. Consider a set of particles, where each particle at time step contains the following components:
[TABLE]
where and are data association indicator, mean and covariance of target states, and importance weight of the particle, respectively. The RBPF algorithm for one target with dynamic model as Eq.1 is:
The first step is to predict the states of target by the Kalman filter prediction step for each particle separately:
[TABLE]
where and denotes the prior mean and covariance, respectively. refers to the prediction step of Kalman filter, i.e. and . 2. 2.
Now, consider a new measurement by the measurement model as Eq.2 is obtained. This step is to sample new association from the optimal importance distribution, that is to say sample a new association from the optimal importance distribution: , where the indices means from time step to . Assume that data association at time step is independent of the previous measurements and depends only on previous associations . Thus, by using Bayes’ rule, the optimal importance distribution is computed by calculating the likelihood of measurements for not only the target () but also the clutter () as follow:
[TABLE]
where the likelihood of measurement is:
[TABLE]
and denotes the Kalman filter measurement likelihood.
The new association is drawn with the probability as:
[TABLE] 3. 3.
The weight of each particle is updated by:
[TABLE] 4. 4.
Finally, kalman filter update step is performed for each particle:
[TABLE]
which means and where , , and .
It worth to note that, resampling is used to remove particles with very low weights and duplicate the particles with high weights. The resampling is applied based on the effective number of particles, which is estimated from the variance of the particle weights sarkka2007rao .
III.2 Unknown number of targets
In this scenario, there are unknown number of targets with clutter in the observed area. Suppose that one target may born, some targets may die, or no birth-death happens in each time step. The problem of tracking unknown number of targets by Rao-Blackwellized Monte Carlo Data Association (RBMCDA) method is divided into three sub problems: estimating the number of targets, data association, and tracking single target sarkka2007rao ; sarkka2004rao .
Suppose target dynamic, measurements model, and clutter distribution as Eqs.1, 2, and 3, respectively. Possible events between two measurements and are a target birth, one or more targets death, and no target death. The measurement may be associated to clutter, one of the existing targets or a newborn target. Also, association priors are known and may be modeled as an -th order Markov chain where contains number of targets at time steps to . The RBMCDA algorithm is:
Suppose target birth happen with the probability when a new measurement is obtained and is the birth event indicator. So, There are three cases with different probabilities for data association and birth event as follow:
- •
Case 1: A target is born and the measurement is associated with the newborn target, that is to say
- •
Case 2: A target is not born and the measurement is associated with one of the existing targets or with clutter, that is to say and where . Markov model for data association in the case of no birth is .
- •
Case 3: Other events have zero probability
Thus, given the associations on the previous steps, the joint distributions of the event and the association is given by:
[TABLE] 2. 2.
The purpose of the death model is only to remove the targets with which no measurements have been associated for a long time. Death events are independent of measurements. After associating a measurement with a target, life time of the target has a probability density which usually is gamma distribution. If the last association with target was at the time and there is a sampled hypothesis that the target is alive on the previous time step , then the probability of target death at current time step is
[TABLE] 3. 3.
Now, the RBMCDA with an unknown number of targets fits to the RBPF framework for a joint state which contains the states of the targets . The implementation idea is to assume that always a (very large) constant number of targets exists. But an unknown, varying number of them are visible (or alive), and they are the ones we are tracking. The visibility indicator represents the visibility of targets. When a target birth occurs, a new item is set in , and the corresponding target prior distribution is updated by the measurement. When a target dies, its distribution again becomes the prior and its state is moved to the end of and .
Here, the RBPF consists of a set of particles where each particle at time step contains the following components:
[TABLE]
where , , , and are data association indicator, target visibility indicator, mean and covariance of the target, and importance weight of the -th particle, respectively. The indices means for targets to . The following information is also stored for each particle:
[TABLE]
where , , and are the number of targets, the time of the last measurement associated with target , and a unique integer valued identifier in all particles, which is assigned at the birth of the target. The RBPF algorithm is now applied to each targets as:
- (a)
The Kalman filter prediction step is applied on each target in each particle separately, due to independence of targets. 2. (b)
Distribution defines the dynamic of birth and deaths. Now, the data association model is of the form . So, the joint Markov chain model for the indicators is:
[TABLE]
The new association is drawn with the probability as:
[TABLE] 3. (c)
The weight of each particle is updated similar to RBPF. 4. (d)
The measurement update is also performed for each target separately.
The assumptions which considered in derivation of RBMCDA are not very restrictive in practice. For example, the assumption that targets are independent from each other is a reasonable assumption in reality. The assumption that possible events between two measurements and are a target birth, one or more targets death, and no target death restricts our problem to only one target possibly born in each time step which is not very restrictive in practice. These assumptions are quite much the same as typical ones in tracking literature bar1995multitarget ; sarkka2004rao .
IV Modified-CI for data fusion
Traditional CI is a convex combination of mean and covariance of estimates received from monitoring nodes and gives more accurate estimations. Suppose that there are two pieces of information and which are received from different sources. The only available information is estimation of the means, covariance and the cross-correlations between them which are and and . If the estimations are independent (that is to say ), then the conventional Kalman is an optimal filter. If is known then the Kalman filter with colored noise may be the best option but if is unknown then CI is a consistent choice. CI fuses two pieces of information into as chen2002estimation ; liggins2008handbook :
[TABLE]
where is computed to minimize a selected norm such as trace or determinant of . While this minimization requires numeric solution of a convex optimization problem (see ”fmincon” in Matlab optimization toolbox) for higher dimensions, closed-form solution is given for lower dimensions in reinhardt2012closed . It is proved in hall2001multisensor that CI yields a consistent estimate for any value of , i.e. where is true covariance matrix. The only constraint that is imposed on the assumed estimates is consistency. In other words, and where and are true covariance matrices.
Now, back to the problem stated in section II. In a distributed network, RBPF is implemented in each monitoring node to detect and estimate the states of possible targets using data measured by its own sensors. Then, the estimations are fused together in processing nodes, see Fig.2. Some researches aim to reach consensus over the network hlinka2014distributed . But, this paper concerns on taking detection parameters into account in fusion algorithm.
The following theorem proposes a modified-CI data fusion method for two nodes and considering different probability of detection for each node. It modifies the traditional CI by replacing the covariance matrices and with and . The modified covariance matrices and depend on covariance matrices of estimates ( and ), detection probability of both nodes, and parameters and which are related to the growth of covariance matrices in miss-detection time intervals. If there is no detection in time, then the accuracy of estimates decreases. So, the covariance of estimations are expanded with the growth parameter .
Theorem IV.1
Let, two monitoring nodes and with probability of detection and estimate mean and covariance and for any observed target, respectively. Then, the following data fusion is consistent for any :
[TABLE]
where , , and , express the growth of covariance in miss-detection intervals. is selected to minimize the trace of .
Proof IV.1
We articulate a mixed game between two nodes and as players. Each player has two action: detect or miss the targets. Player and detect with probabilities and and miss with and , respectively, see table 1. Since, the aim of target tracking is to minimize the trace of covariance matrix, So the trace of is considered as payoff function. The idea behind mixed games is that the solution gives a probability distributions which players select their actions randomly according to that hespanha2011introductory . But, here the probabilities of selecting an action (i.e. probability of detection) is given. So, we have to manipulate the payoff function such that the probabilities and result to maximum payoff. Table 1 shows payoff matrix of a 2-player mixed game which the payoff of player in only written.
Anyway, the mean of player utility could be written as:
[TABLE]
Matching this equation with Eq.IV leads to define where and . So, we have
[TABLE]
Finally, finding in such a way that maximize the trace of leads to maximum utility.
if and then and because and which result in and . Now, by considering these assumptions, the consistency could be proved same as (hall2001multisensor, , Appendix 12.A).
Let us investigate two particular case. First, which means that the covariance matrix does not growth on miss-detections, that is to say, there is no difference between detection or miss-detection as players possible actions. So, and which leads to the traditional CI. This make sense because we make no difference between two different action of players. Second, if and which means that both nodes have identical probability of detection, then and where . It is reasonable that under similar parameters for nodes, the covariance matrix weights similar to .
Batch Covariance Intersection (BCI) is an extension of the pairwise CI for fusion of more than two data julier2009general . When the mean and variances are known but cross-covariances are unknown, the BCI is and with constraints and . In the problem stated in this paper, BCI is modified as following lemma:
Lemma IV.1
Let, monitoring nodes , with probability of detection estimate mean and covariance for any observed target. The following data fusion (which we call Modified BCI: MBCI) is consistent for any cross covariance :
[TABLE]
where and express the growth of covariance in miss-detection intervals. is selected to minimize the trace of .
Proof IV.2
The proof is simply given by extend the game which is defined in theorem 4.1 for players.
V simulation result
In this section, the proposed method is utilized when there is one target or unknown number of target in the are of interest.
V.1 One target
In this case, there is one target and clutter in the area of interest. Consider the target dynamic as in sarkka2007rao :
[TABLE]
where is a constant parameters in each time step but may change in time; is zero mean Gaussian distribution with covariance matrix where is a identity matrix. Assume that two monitoring node and , with different probability of detection and , observe the area of interest by measurement model:
[TABLE]
where is zero mean Gaussian distribution with covariance matrix . Density of clutter is also considered as for both nodes. Monitoring nodes sample data every second. and are considered to be . An instantiation of the target trajectory and the corresponding measurements is shown in Fig.3.
Monitoring nodes and employe RBPF with particles to estimate states of the target which are shown in Fig.4. Then, the estimations are transmitted to processing node where fuses the recieved data by modified CI. The results are shown in Fig.5.
The mean square error (MSE) of estimations as well as the mean of covariance matrix (MNCM) in the terms of 2-norm are calculated for using Kalman filter and RBPF in monitoring nodes for state estimations and CI and modified-CI in processing nodes for data fusion to show the utility of the proposed method. Results are given in table.2. There is no data association in Kalman filter; so the MSE of Kalman filter is large due to existence of clutter. By considering data association in RBPF, the MSE improved significantly rather than Kalman filter. MNCM is decreased after fusing the estimations of two nodes by CI. Finally, MSE and MNCM for modified-CI are less than other methods. The 2-norm of covariance matrix is shown in Fig.6 for time period between 13 to 15 (sec). It can be seen that the 2-norm of covariance matrix for modified-CI is lower than other method.
V.2 Unknown number of targets
Assume unknown number of targets with dynamic Eq.34 exist, born or die in an area of interest which is observed by distributed non-homogeneous monitoring network of Fig.1. The scenario that is simulated here consider one target in the interested area and another targets appear at and disappear one by one at . The network consist of monitoring nodes which utilize RBMCDA to estimate number of targets and their states, and processing nodes which fuse received data by modified CI. Each monitoring node send its estimation to the connected neighbor processing nodes in every time step. The detection probability of monitoring nodes are which are used in modified CI. Any monitoring nodes may detect some targets and/or clutter in any time step. RBMCDA assume that a target is born in each time step with probability and it is removed based on the death model of Eq.17 where has gamma distribution with and . An instantiation of this scenario with considering particles in the filter for a typical monitoring node (node ) is shown in Fig.7. The plot on left shows true target path and all the measurements while the middle plot shows estimated path. The right plot depicts the number of detected targets in time.
The processing nodes have to associate received data together which is done here based on minimum distance, namely data which have minimum distance from each other and are close together more than a threshold. Modified-CI is conducted for data fusion if more than one data is received for any target. The output results are shown in Fig.8 for processing node number 9. The sum of MSE and MNCM for all detected targets are calculated for different nodes which are written in table 3. The proposed method has less MSE and MNCM than other algorithms.
VI conclusion
There are nodes with different probability of detection and clutter density in a non-homogeneous monitoring network which may results in different precision for state estimations. The fact of non-homogeneity monitoring nodes is considered in data fusion algorithm to reduce estimation error. To this end, a data fusion mixed game is articulated between two neighbor monitoring nodes which results to a modified CI. The proposed modified CI consider probability of detection of each node into account in fusion process. To show the utility of the method, a scenario for target detection and tracking in a cluttered environment was proposed where multi monitoring nodes with different probability of detection monitor an area of interest. The problem was investigated in two situation: one target and unknown number of targets. The Rao-Blackwellized particle filter was employed to estimate the states of targets in each monitoring node. The particle filter estimations from different monitoring nodes were fused in processing nodes by modified CI. The simulation results showed that mean square error and the 2-norm of covariance matrix for the proposed method are less than Kalman filter, particle filter and fused data with traditional CI.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1(1) Dong H, Wang Z, Lam J, Gao H. Distributed filtering in sensor networks with randomly occurring saturations and successive packet dropouts. International Journal of Robust and Nonlinear Control 2014; 24 (12):1743–1759.
- 2(2) Bocca M, Kaltiokallio O, Patwari N, Venkatasubramanian S. Multiple target tracking with rf sensor networks. Mobile Computing, IEEE Transactions on 2014; 13 (8):1787–1800.
- 3(3) Ding D, Wang Z, Shen B. Recent advances on distributed filtering for stochastic systems over sensor networks. International Journal of General Systems 2014; 43 (3-4):372–386.
- 4(4) Ulker Y, Gunsel B. Multiple model target tracking with variable rate particle filters. Digital Signal Processing 2012; 22 (3):417–429.
- 5(5) Morelande MR, Kreucher CM, Kastella K. A bayesian approach to multiple target detection and tracking. Signal Processing, IEEE Transactions on 2007; 55 (5):1589–1604.
- 6(6) Bazzazzadeh N. Optimal and robust distributed data fusion for joint target-detection and tracking. School of Engineering and Physical Sciences Heriot Watt University, M Sc thesis 2009; .
- 7(7) Mahler RP. Statistical multisource-multitarget information fusion . Artech House, Inc., 2007.
- 8(8) Vo BN, Vo BT, Phung D. Labeled random finite sets and the bayes multi-target tracking filter. Signal Processing, IEEE Transactions on 2014; 62 (24):6554–6567.