Radially symmetry of minimizers to the weighted Dirichlet energy
Aleksis Koski, Jani Onninen

TL;DR
This paper proves that for certain radial weights, the minimizers of the weighted Dirichlet energy between planar annuli are radially symmetric, simplifying the problem and extending known results to more general weights.
Contribution
It establishes radial symmetry of energy minimizers for a broad class of radial weights, including increasing weights and those with conformally thin targets.
Findings
Radial symmetry holds for increasing radial weights.
Symmetry also holds when the target is conformally thin.
Results extend previous symmetry results to more general weights.
Abstract
We consider the problem of minimizing the weighted Dirichlet energy between homeomorphisms of planar annuli. A known challenge lies in the case when the weight depends on the independent variable . We prove that for an increasing radial weight the infimal energy within the class of all Sobolev homeomorphisms is the same as in the class of radially symmetric maps. For a general radial weight we establish the same result in the case when the target is conformally thin compared to the domain. Fixing the admissible homeomorphisms on the outer boundary we establish the radial symmetry for every such weight.
Click any figure to enlarge with its caption.
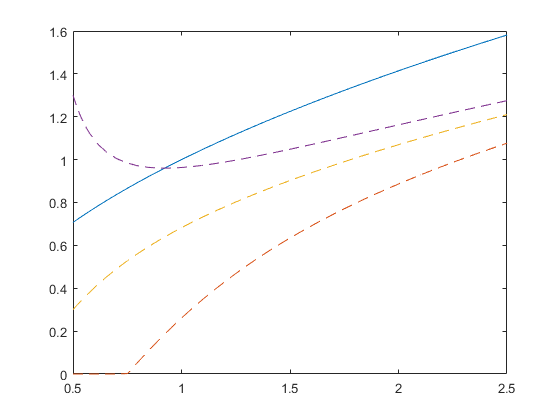 Figure 1
Figure 1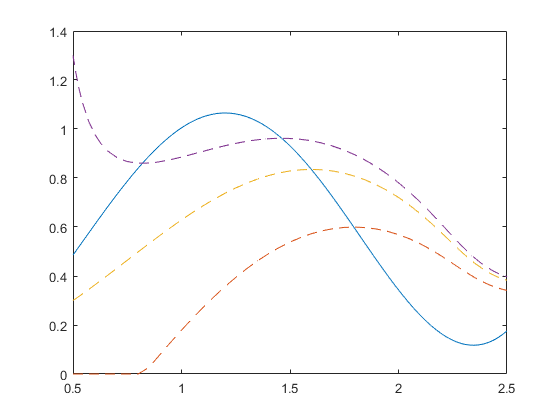 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsNonlinear Partial Differential Equations · Analytic and geometric function theory · Advanced Mathematical Modeling in Engineering
Radially symmetry of minimizers to the weighted Dirichlet energy
Aleksis Koski
Department of Mathematics and Statistics, P.O.Box 35 (MaD) FI-40014 University of Jyväskylä, Finland
and
Jani Onninen
Department of Mathematics, Syracuse University, Syracuse, NY 13244, USA and Department of Mathematics and Statistics, P.O.Box 35 (MaD) FI-40014 University of Jyväskylä, Finland
Abstract.
We consider the problem of minimizing the weighted Dirichlet energy between homeomorphisms of planar annuli. A known challenge lies in the case when the weight depends on the independent variable . We prove that for an increasing radial weight the infimal energy within the class of all Sobolev homeomorphisms is the same as in the class of radially symmetric maps. For a general radial weight we establish the same result in the case when the target is conformally thin compared to the domain. Fixing the admissible homeomorphisms on the outer boundary we establish the radial symmetry for every such weight.
Key words and phrases:
Variational integrals, harmonic mappings, energy-minimal deformations.
2010 Mathematics Subject Classification:
Primary 35J60; Secondary 30C70
A. Koski was supported by the Academy of Finland Grant number 307023. J. Onninen was supported by the NSF grant DMS-1700274.
1. Introduction
The Geometric function theory (GFT) is largely concerned with generalizing the theory of conformal mappings. In this paper we turn to a variational approach and study mappings with smallest weighted mean distortion. Our underlying idea is to extend the theory of extremal quasiconformal mappings to the minima of the weighted mean average of the distortion function; that is, minimize the weighted -norm as opposed to the -norm in the Teichmüller theory. There are many natural reasons for studying such a minimization problem. This quickly leads one to extremal mappings of mean distortion between annuli, a classical and well-understood problem for extremal quasiconformal mappings, traditionally referred to as the Grötsch problem. Indeed, annuli
[TABLE]
are the first in order of complexity where one observes nontrivial conformal invariants such as moduli. Hereafter and are called the inner and outer radii of and , respectively. Precisely, we search mappings with least weighted distortion
[TABLE]
subject to Sobolev homeomorphims with integrable distortion. Recall that a Sobolev homeomorphism has finite distortion if there is a measurable function , finite a.e., such that
[TABLE]
Here and in what follows we use the Hilbert-Schmidt norm of a linear map , defined by the rule . We are interested in homeomorphisms and their limits, we recall that the Jacobian determinant of a Sobolev homeomorphism is always locally integrable. The distortion inequality (1.2) merely asks that the differential vanishes at those points where the Jacobian . . The smallest function for which the distortion inequality (1.2) holds is denoted by ,
[TABLE]
We obtain quasiconformal mappings if . The theory of quasiconformal mappings is by now well understood, see the monographs [40] by Reshetnyak, [41] by Rickman and [22] by Iwaniec and Martin. In the last 20 years, systematic studies of mappings of finite distortion have emerged in GFT [1, 22, 15]. The theory of mappings of finite distortion arose from the need to extend the ideas and applications of the classical theory of quasiconformal mappings to the degenerate elliptic setting. Motivated by mathematical models of nonlinear elasticity [6, 7, 8], the focus has been finding a class of mappings, as close to homeomorphisms as possible, in which the minimum energy (1.1) is attained. In the case of minimizing the weighted -mean distortion this is possible only when we move, equivalently, to minimize the weighted Dirichlet energy of the inverse map. Indeed, the inverse map belongs to the Sobolev space , and we have
[TABLE]
see [3, 14, 16] for details. In such a problem the transition to the energy of the inverse map results in a convex variational integral. Therefore, from now on we minimize the weighted Dirichlet energy
[TABLE]
The infimum is subjected to orientation preserving Sobolev homeomorphisms in which are furthermore assumed to preserve the order of the boundary components. Such a class of Sobolev homeomorphisms is denoted by .
Because of rotational symmetry it seems likely that the energy-minimal deformations of (1.4) are radial minimal mappings. However, the difficulty to verify the rotationally symmetry is well recognized in the theory of nonlinear elasticity. A number of papers in the literature is devoted to understand the expected radial symmetric properties [2, 5, 10, 11, 13, 17, 19, 20, 23, 24, 25, 30, 31, 32, 33, 34, 35, 38, 42, 43, 45]. We study this question for the weighted Dirichlet energy.
Question 1.1**.**
Does the equality
[TABLE]
hold?
In what follows, we denote the subclass of radial homeomorphisms by
[TABLE]
In general the mappings with the infimum energy in (1.5) need not be homeomorphisms. In fact a part of the domain near its boundary may collapse into the inner boundary of the target annulus . In mathematical models of nonlinear elasticity this is interpreted as interpenetration of matter. Of course, in general enlarging the set of the admissible mappings may change the nature of the energy-minimal solutions. This may result in smaller energy than in , whether or not the infimum is attained. To avoid such an effect one needs to know that a weak limit of a minimizing sequence can be realized as a strong limit of homeomorphisms in . This follows from the result in [28] which tells us that the classes of the weak and strong limits of -Sobolev homeomorphisms are the same. We denote such a class of deformations from into by . It is quite easy to see that mappings in extend as continuous monotone maps of onto . As a converse Iwaniec and Onninen [27] proved a Sobolev variant of the classical Youngs approximation theorem. According to their result the class equals the class of orientation-preserving monotone mappings from onto in the Sobolev class that also preserve the order of the boundary components of annuli. Monotonicity, the concept of C.B. Morrey [36] simply means that the preimage of a point in is a continuum in .
The class of the weak -limits of radially symmetric homeomorphisms can be also give purely analytical characterization. This leads us to define
[TABLE]
where
[TABLE]
Now, the identity (1.5) in Question 1.1 can be equivalently written as
[TABLE]
First, let us look at this question in the simplest Dirichlet energy case, . The papers [2, 25] introduced and heavily relied the concept of Free Lagrangians and gave a positive answer to Question 1.1 in terms of the Dirichlet energy. The underlying idea was to estimate the integrand of an energy functional from below in terms of free Lagrangians. Free Lagrangians, special null Lagrangians [4], are nonlinear differential forms whose integral means depends only on a given homotopy class of homeomorphisms. The volume form is not only a simple example of free Lagrangian but also a key player in the proof. In the conformally equivalent case, it is the only free Lagrangian that is needed. In spite of being a trivial case, it apprehends the essence of free Lagrangians well. Suppose that and . Showing that the identity map is a global minimizer follows immediately from Hadamard’s inequality :
[TABLE]
Second, having the techniques of free Lagrangians and the estimates for the Dirichlet energy in hand proving corresponding results for weights that depend only on is straightforward. Again, the conformal case, captures this phenomenon well. Indeed, for , and we have
[TABLE]
It is known that the radial minimizers to the weighted Dirichlet energy are the absolute minimizers provided the weight is independent of , [2, 25, 32]
Proposition 1.2**.**
Suppose that and . Then the equality (1.5) always holds.
We hence turn our attention in Question 1.1 to the case where the weight depends on . From now on we assume that the weight has the form . Such a weight brings a completely new challenge to the studied question. First, there is no trivial case being analogous to (1.6). Second, such difficulty is already recognized in the literature. The paper [29] is devoted to study the radial minimizers of , . Question 1.1 for the weight is explicitly raised in [29, Question 4.1]. Our next result proves that the radial minimizers are indeed absolute minimizers when the weight is increasing.
Theorem 1.3**.**
Assume that is continuous, positive and nondecreasing. Then the weighted Dirichlet energy
[TABLE]
admits a radially symmetric minimizer in the class . Moreover, there exists an increasing function so that this minimizer is a homeomorphism exactly when .
For more general weights the question whether the minimizer of is attained for a radial mapping remains open in general. However, if the target annulus is conformally thin enough we are able to establish the radial symmetry of the minimizer with no extra assumptions on the weight.
Theorem 1.4**.**
Let be a continuous function. Then there exists a function so that whenever , the equality (1.5) holds.
Of course, even in the case of the Dirichlet energy, , the minimizers need not be harmonic. In general, the Euler-Lagrange equation of is unavailable; one cannot perform first variations within the class of Sobolev homeomorphisms, not even in . Therefore, narrowing the admissible homeomorphisms in does not change the difficulty of the question in this respect.
1.1. Partially fixed boundary value problem
Finally, we study the minimization of the weighted Dirichlet energy under mappings fixed on the outer boundary of , but allowed to be free on the inner boundary. For simplifying the notation, we write and
[TABLE]
We prove that keeping the homeomorphisms fixed in the minimizing sequence on the outer boundary leads the hunted radial symmetry property for an arbitrary weight.
Theorem 1.5**.**
Assume that is continuous. Then we have
[TABLE]
The proof of Theorem 1.5 relies on our recent developments for the partially fixed boundary value problem in [34].
2. Analysis of the radial minimizer and the definition of the function .
In the paper [29] the radial minimization problem for the energy (1.7) was completely characterized. It was shown that when subjected to minimization in the class of radial maps , the energy (1.7) admits a unique minimizer for every continuous positive weight . We will henceforth denote this radial minimizer by . Since is radial, we may write for some nondecreasing surjection . In [29], it was shown that the function may be recovered from via the following first-order ODE.
[TABLE]
Here the function is defined by the equation
[TABLE]
at least at the points where the solution takes nonnegative values. One of the reasons for why we exclude the negative values of is that otherwise (2.1) would imply that is decreasing at these points. To make a rigorous definition of the function , we first make the following observation, which is an easy consequence from (2.2).
Observation 1. Any solution of equation (2.2) is increasing at the points where and decreasing when .
Since is positive everywhere, this observation implies that any solution of (2.2) is increasing at points where it takes the value zero. Hence every solution has at most one zero, and if such a point exists then the solution is negative on the interval and positive on . This motivates us to define the function as follows.
Given the radii and an initial value which may be any real number, we let be a solution of (2.2) on the interval with initial data . The existence and uniqueness of such a solution will follow from the classical ODE theory as soon as we show that the map
[TABLE]
is Lipschitz-continuous with respect to the variable . Since and are bounded away from zero and infinity, we need only to verify that no solution of (2.2) may blow up. But this follows easily from Observation 1, as the observation implies that any solution is bounded by the number . Note also that by uniqueness the graphs of any two solutions to (2.2) do not intersect.
We now define by . From the discussion after Observation 1 we know that either everywhere (when ) or there exists a point so that on and on (when ).
Given the function , one may always solve the separable ODE (2.1) to obtain the function . Furthermore, the conformal modulus of the target annulus is related to by the equation
[TABLE]
Hence the target annulus is defined, up to a scale, by the choice of the initial value . As goes through every real number, the equation (2.3) and the definition of show that the conformal modulus of the target, , takes every value from [math] to . Hence every possible target annulus is covered by this consideration. We note also that increasing the initial value increases both the function and the conformal modulus of the target , i.e. makes the target annulus thicker.
Furthermore, we define the function as follows. Given the numbers and , we let denote the solution of the equation (2.2) with the initial value . We then define by
[TABLE]
Since both equation (2.2) and the integral on the right hand side in the above equation are independent with respect to scaling in , the function indeed only depends on the quotient rather than both and . The above discussion now shows that for every target annulus with the initial data is nonnegative and hence the map is positive on . Likewise for every target with there is some radius for which on . Comparing with (2.1), we find that the radial minimizer is a homeomorphism exactly when (since for ) and for thinner targets the map fails to be a homeomorphism on the subset which is collapsed onto the inner boundary of the target (since for ).
3. Free Lagrangians
In 1977 a novel approach towards minimization of polyconvex energy functionals was developed and published by J. M. Ball [4]. The underlying idea was to view the integrand of an energy functional as convex function of null Lagrangians. The term null Lagrangian pertains to a nonlinear differential expression whose integral over any open region depends only on the boundary values of the map, see [9, 12, 18]. Our homeomorphisms are not prescribed on the boundary. There still exist some nonlinear differential forms, called free Lagrangians [25], defined on a given homotopy class of homeomorphisms, whose integral means remain independent of the mapping. These are rather special null Lagrangians.
Let and be two circular annuli in . Recall here we work with one particular homotopy class of –orientation-preserving homeomorphisms . that also preserve the order of the boundary components; that is, for and for .
Clearly, the polar coordinates
[TABLE]
are best suited for dealing with mappings of planar annuli. For a general Sobolev mapping we have the formula
[TABLE]
We shall make use of the following free Lagrangians.
- (i)
Pullback of a form in via a given mapping ;
[TABLE]
Thus, for all we have
[TABLE] 2. (ii)
A radial free Lagrangian
[TABLE]
Thus, for all we have
[TABLE] 3. (iii)
A tangential free Lagrangian
[TABLE]
Thus, for all we have
[TABLE] 4. (iv)
Let , , be a nonnegative -smooth function. The following differential expression is a free Lagrangian
[TABLE]
For we have
[TABLE]
All of these Free-Lagrangians were introduces by Iwaniec and Onninen. The ones in (i)-(iii) appeared first time in [25] and the last one (iv) in their forthcoming book [26].
Let be a bounded Jordan domain with rectifiable boundary . Then the familiar geometric form of the isoperimetric inequality reads as
[TABLE]
where is the area of and is the length of . We denote the ball centered at the origin with radius by . First, suppose that lies in the Sobolev class . Partly using the polar coordinates , and we formulate the integral form of the isoperimetric inequality, see [37, 39]:
[TABLE]
Second, suppose that is an orientation-preserving diffeomorphism which also preserves the order of boundary components. Then applying (3.7) we obtain
[TABLE]
Indeed, fix . To simplify the notation we assume, without loss of generality, that . Considering the differomorphism restricted to the unit sphere and then extending this restricted mapping to the ball in the radial manner, namely,
[TABLE]
Note on and is continuous differentiable on . The isoperimetric inequality (3.7) yields,
[TABLE]
The Jacobian is the most known example of null Lagrangians and by Green’s theorem we have
[TABLE]
Therefore, the claimed version of the isoperimetric inequality (3.8) follows.
4. Proof of Theorem 1.3
Proof.
Case 1. Assume that .
The diffeomorphisms from onto are dense in [21]. Therefore, we can equivalently replace the admissible homeomorphism in (1.5) by diffeomorphisms. Precisely,
[TABLE]
where is for the class of orientation preserving diffeomorphisms from onto which also preserve the order of the boundary components.
Let . We write and the weighted Dirichlet energy of in polar coordinates as follows
[TABLE]
Let us also denote by the expression under the integral, which we will now estimate from below. Recall that denotes the minimizer among the radial mappings from onto , which is a homeomorphism in this case. At this point we already remark that in all of the forthcoming estimates equality will hold for , and will also be the only map for which there is equality in every estimate. Let us start by defining the expression
[TABLE]
where is a constant to be determined. Then our claim is that
Claim 1. If , then the constant may be chosen so that both and . Furthermore, the expressions and are also nonnegative and we have the identity
[TABLE]
After this claim is proven, our estimates for the expression proceed as follows
[TABLE]
Here we applied to the elementary inequality for real numbers and the identity (4.2). By a simple application of Cauchy-Schwartz, we obtain that
[TABLE]
Here the equality is attained exactly for , and we see that the right hand side does not depend on the choice of the map . Next, we apply the isoperimetric inequality (3.8) and the Cauchy-Schwartz inequality to find that
[TABLE]
Applying (4.4), we find that
[TABLE]
We are now in a position to apply the free Lagrangian (iv) from Section 3 with to the right hand side of (4.5). The related equation (3.6) allows us to find the bound
[TABLE]
which is independent of . Combining the estimates (4.3)-(4.6), we find the required lower bound for .
[TABLE]
Let us now prove Claim 1. We start by verifying the identity (4.2). Here we make use of the equations (2.1) and (2.2).
[TABLE]
Let us now choose the constant . We must choose this constant in such a way that both of the inequalities
[TABLE]
hold on every point of the interval . Since and , we may transform these two inequalities into the following
[TABLE]
Let us now make a couple of observations.
Observation 2. The function is nondecreasing.
Proof. By computation,
[TABLE]
This observation shows that to satisfy the inequalities in (4.7) we may as well choose , as then the first inequality is always satisfied.
Observation 3. Suppose that is increasing. If at some point it holds that , then for every .
Proof. The first sentence follows directly from (2.2). For the second part, observe that if it would hold that for some , then by continuity there would exist a point so that and for all . Since is nondecreasing, we have . By the mean value theorem we must have that for some point , but this is a contradiction with Observation 1 since on this interval.
Since is defined as a solution of the ODE (2.2), this observation shows that there are only the two following possible scenarios. Either , in which case everywhere. In this case the right hand side in (4.7) is nonpositive so any constant will do.
In the second case, . In this case starts out as decreasing, and may hit at some point . If such a exists then for all and the right inequality in (4.7) holds on this part of the interval . In any case, it is enough to show that the right inequality in (4.7) holds on an interval on which is decreasing. But this is an easy consequence of the following.
Observation 4. At the points where is decreasing, the expression is also decreasing.
Proof. We make a direct computation. Here we also reuse the computation (4.8).
[TABLE]
Since is decreasing and is nondecreasing, the expression is decreasing. Thus the last expression above is negative, and we have proved the claim.
Via Observation 4, we now find that for on the interval we have
[TABLE]
This proves the inequality (4.8) for the choice of .
Returning to the statement of Claim 1, we must still verify the nonnegativity of the expressions and . But this easily follows from the nonnegativity of and as well as the identity
[TABLE]
which was essentially verified in the proof of (4.2).
Case 2. Assume that .
Recall that in this case there exists a radius so that for all . For the corresponding radial minimizer the part of the domain annulus near its inner boundary collapses into the inner boundary of . Moreover, the function is identically zero on and solves the equation (2.2) only on . This suggests that we should estimate the integral (4.1) into two separate parts.
On the interval , we apply the estimates
[TABLE]
where the last inequality is due to the fact that the length of the image curve of with under is at least . In particular, equality here holds exactly for since sends the annulus to the circle of radius .
On the interval we apply the same estimates as in Case 1. However, in this case we may simply choose the constant appearing in Case 1 to be zero, as the fact that implies that everywhere. Hence we have that . This results in the estimate
[TABLE]
Combined, we have that
[TABLE]
∎
5. Proof of Theorem 1.4
Proof.
The proof of this theorem follows the same lines of arguments as the proof of Theorem 1.3. The only parts in the proof of Theorem 1.3 where the fact that is nondecreasing was used were
- (1)
To guarantee that if then for all . 2. (2)
To deal with the estimates for the constant at the points where .
Hence if we are somehow able to guarantee that for every point , then the proof of Theorem 1.3 adapts to any positive continuous weight. However, if we recall the discussion in Section 2, this is always possible to do by choosing a small enough initial value . Letting denote the largest map for which the inequality holds for every , we may define the function by the formula
[TABLE]
This definition guarantees that for any target with the associated function satisfies for every , which proves the fact that has a radial minimizer by the discussion above.
The fact that is continuous and positive on implies that is bounded from below by a positive constant, which in turn guarantees that the map defined above is not identically zero. This also shows that for every . ∎
6. Proof of Theorem 1.5
The proof of this theorem is based on the proof of Theorem 1.3 in [34]. We begin by applying Hölder’s inequality in the form
[TABLE]
where denotes the radial minimizer as defined in Section 2. Since equality holds here for , it will be sufficient to estimate the quantity on the right hand side. Let be a function to be determined, . Writing in polar coordinates and applying an elementary inequality gives
[TABLE]
We wish to find such that equality holds in this estimate for . A short calculation gives
[TABLE]
We hence obtain the estimate
[TABLE]
where one may compute that the coefficients simplify to
[TABLE]
From the computation (4.8) we may see that these coefficients satisfy the equality . The rest of the proof is exactly the same as in [34], following from the part of the proof of Theorem 1.3 after a similar equality was established. The key assumption, i.e. that the mapping is fixed on the outer boundary, is utilized in this part of the proof just before Lemma 3.1.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] K. Astala, T. Iwaniec, and G. Martin, Elliptic partial differential equations and quasiconformal mappings in the plane , Princeton University Press, 2009.
- 2[2] K. Astala, T. Iwaniec, and G. Martin, Deformations of annuli with smallest mean distortion , Arch. Ration. Mech. Anal. 195 (2010), no. 3, 899–921.
- 3[3] K. Astala, T. Iwaniec, and G. Martin and J. Onninen, Extremal mappings of finite distortion , Proceedings of the London Math. Soc. (3) 91, no 3 (2005) 655–702.
- 4[4] J. M. Ball, Convexity conditions and existence theorems in nonlinear elasticity , Arch. Rational Mech. Anal. 63 (1976/77), no. 4, 337–403.
- 5[5] J. M. Ball, Discontinuous equilibrium solutions and cavitation in nonlinear elasticity , Philos. Trans. R. Soc. Lond. A 306 (1982) 557–611.
- 6[6] J. M. Ball, Singularities and computation of minimizers for variational problems , Foundations of computational mathematics (Oxford, 1999), 1–20, London Math. Soc. Lecture Note Ser., 284, Cambridge Univ. Press, Cambridge, 2001.
- 7[7] J. M. Ball, Some open problems in elasticity , Geometry, mechanics, and dynamics, 3–59, Springer, New York, (2002).
- 8[8] J. M. Ball, Progress and Puzzles in Nonlinear Elasticity , Proceedings of course on Poly-, Quasi- and Rank-One Convexity in Applied Mechanics, CISM, Udine, (2010).