Computing a Minimum-Width Cubic and Hypercubic Shell
Sang Won Bae

TL;DR
This paper introduces the first efficient algorithm for computing the minimum-width axis-aligned cubic shell enclosing a set of points, with extensions to higher dimensions, achieving near-optimal running times.
Contribution
It presents the first known algorithm for the minimum-width cubic shell problem, with a running time of O(n log^2 n), and extends the approach to higher dimensions.
Findings
First nontrivial algorithm for cubic shell problem
Algorithm runs in O(n log^2 n) time in 3D
Extension to higher dimensions with O(n^{⌊d/2⌋} log^{d-1} n) complexity
Abstract
In this paper, we study the problem of computing a minimum-width axis-aligned cubic shell that encloses a given set of points in a three-dimensional space. A cubic shell is a closed volume between two concentric and face-parallel cubes. Prior to this work, there was no known algorithm for this problem in the literature. We present the first nontrivial algorithm whose running time is . Our approach easily extends to higher dimension, resulting in an -time algorithm for the hypercubic shell problem in dimension.
Click any figure to enlarge with its caption.
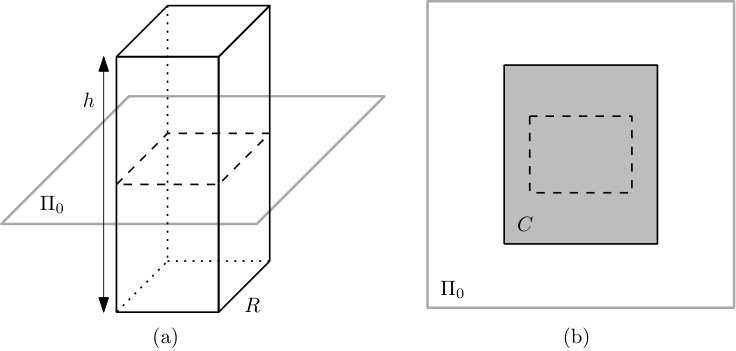 Figure 1
Figure 1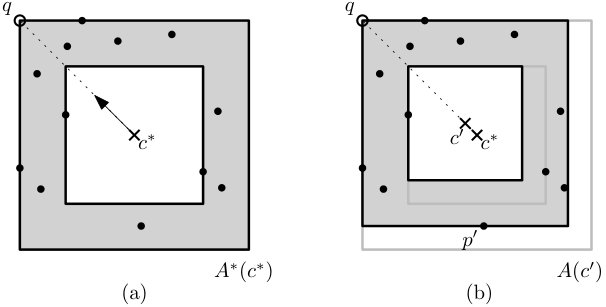 Figure 2
Figure 2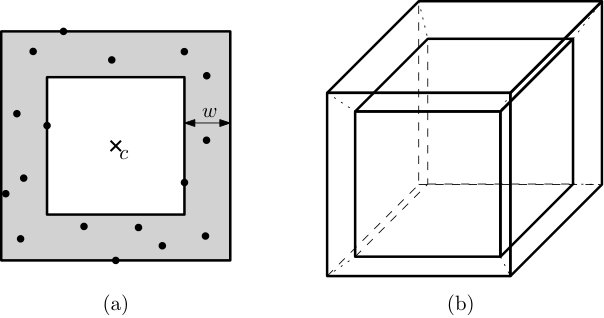 Figure 3
Figure 3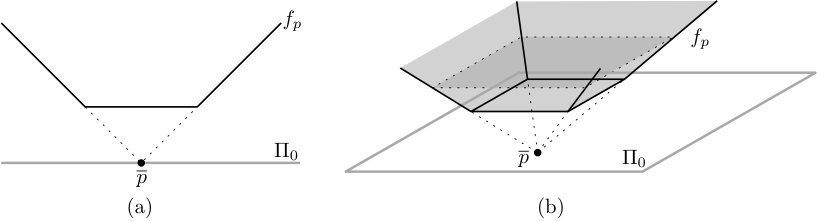 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Computing a Minimum-Width Cubic and Hypercubic Shell††thanks: This work was supported by Kyonggi University Research Grant 2018.
Sang Won Bae111Division of Computer Science and Engineering, Kyonggi University, Suwon, Korea. Email: [email protected]
( \currenttime)
Abstract
In this paper, we study the problem of computing a minimum-width axis-aligned cubic shell that encloses a given set of points in a three-dimensional space. A cubic shell is a closed volume between two concentric and face-parallel cubes. Prior to this work, there was no known algorithm for this problem in the literature. We present the first nontrivial algorithm whose running time is . Our approach easily extends to higher dimension, resulting in an -time algorithm for the hypercubic shell problem in dimension.
Keywords: facility location, geometric optimization, exact algorithm, cubic shell, hypercubic shell, minimum width
1 Introduction
The minimum-width circular annulus problem asks to find an annulus of the minimum width, determined by two concentric circles, that encloses a given set of points in the plane. It has an application to the points-to-circle matching problem, the minimum-regret facility location, and the roundness problem. After early results on the circular annulus problem [13, 12], the currently best algorithm that computes a minimum-width circular annulus that encloses input points takes time [3, 2].
Along with these applications and with natural theoretical interests, the minimum-width annulus problem and its variants have recently been attained a lot of attention by many researchers, resulting in various efficient algorithms. Abellanas et al. [1] considered minimum-width rectangular annuli that are axis-parallel, and presented two algorithms taking or time: one minimizes the width over rectangular annuli with arbitrary aspect ratio and the other does over rectangular annuli with a prescribed aspect ratio, respectively. Gluchshenko et al. [10] presented an -time algorithm that computes a minimum-width axis-parallel square annulus, and proved a matching lower bound, while the second algorithm by Abellanas et al. can do the same in the same time bound. If one considers rectangular or square annuli in arbitrary orientation, the problem gets more difficult. Mukherjee et al. [11] presented an -time algorithm that computes a minimum-width rectangular annulus in arbitrary orientation and arbitrary aspect ratio. The author [5] recently showed that a minimum-width square annulus in arbitrary orientation can be computed in time.
Despite of these recent progress and successful generalizations, little is known about the high dimensional variants of the annulus problem. For , the -dimensional generalization of annuli is often referred to shells of a certain body of volume. Mukherjee et al. [11] showed that a minimum-width shell of -dimensional axis-parallel boxes (or hyper-rectangules) can be computed in time. For the minimum-width spherical or hyperspherical shells, Chan [8] showed an -time exact algorithm, and some approximation algorithms are known [4, 8]. However, to our best knowledge, there is no known result for the cubic or hypercubic shell problem in the literature. In fact, it is not difficult to apply Chan’s approach and algorithm [8] for the hyperspherical shells to the hypercubic shells, which implies -time algorithm exact algorithm that computes a minimum-width hypercubic shell enclosing points in . This in particular implies an -time algorithm that computes a minimum-width cubic shell for .
In this paper, we address the minimum-width hypercubic shell problem in three or higher dimensions. We first handle the three dimensional case, and present a new algorithm that computes a minimum-width axis-aligned cubic shell that encloses input points. Our algorithm is based on a new approach which is different from that of Chan [8], and takes time in the worst case. Next, we show that our approach can be extended to higher dimensions , and present an algorithm that runs in expected time.
The rest of the paper is organized as follows: We start with introducing some preliminaries in Section 2. After providing basic observations on hypercubes in for in Section 3, we discuss the case of dimension in Section 4 and present our algorithm that computes a minimum-width axis-aligned cubic shell that encloses input points in . We then extend our approach and algorithm to higher dimensions in Section 5. We finally concludes our paper with Section 6.
2 Preliminaries
In this section, we introduce some preliminaries for our discussions. We consider the -dimensional space for with a standard coordinate system of axes, namely, the -axis, -axis, …, and -axis. For any point , its coordinates will be referred to in this order, so . The norm of , denoted here by , is defined to be
[TABLE]
For any two points , the distance between and is . The -ball centered at with radius , denoted by , is the set of points such that . A -dimensional axis-aligned hypercube is a synonym to an -ball in . In particular, an axis-aligned hypercube is called an interval if ; an axis-aligned square if ; and an axis-aligned cube if . The side length of a hypercube is twice its radius. Throughout this paper, we only discuss axis-aligned hypercubes, so we shall mean axis-aligned hypercubes without the adjective “axis-aligned.”
Two hypercubes are called concentric if they share a common center. A hypercubic shell in is the closed volume between two concentric hypercubes, called the outer hypercube and the inner hypercube of , respectively, where the radius of is at least that of . Specifically, , where denotes the interior of . The width of a hypercubic shell is the difference between the radii of its inner and outer hypercubes. A hypercubic shell is also called a square annulus, in particular, for , and a cubic shell for . See Figure 1 for an illustration of a square annulus in and a cubic shell in .
The main purpose of this paper is to solve the minimum-width hypercubic shell problem, in which we are given a set of points in for and want to find a hypercubic shell of minimum width that encloses . The problem is also called the minimum-width square annulus problem for and the minimum-width cubic shell problem for .
As introduced above, the minimum-width square annulus problem can be solved in time in the worst case, and its matching lower bound is also known [10]. The case of would be less interesting, while it is worth mentioning for completeness. For , the problem is to compute two intervals of equal length that contain given numbers , and it can be easily done in time.
Theorem 1
The minimum-width hypercubic problem can be solved in time for and time for , both in the worst case.
In the following, we consider the problem for and higher. For the purpose, we need a basic geometry of cubes and hypercubes enclosing the given set of points. Throughout the paper, we shall say that a facet of a hypercube or a box contains a point if the facet or any face of less dimension incident to it contains the point .
Lemma 1
Let for be a set of points, and be a hypercube that encloses . Then, is a smallest enclosing hypercube for if and only if there are two parallel facets of such that each of them contains a point of .
- *Proof. *
*If there is no pair of parallel facets of , each of which contains a point of , then is certainly not of the smallest size. Conversely, suppose that there are two parallel facets of containing a point of on each. Let be these two points on the parallel facets of . Then the radius of is determined by and , . On the other hand, any hypercube enclosing should includes these two points and , so the radius of such hypercube cannot be smaller than . Hence, is a smallest enclosing hypercube for . *
3 Basic Observations on Hypercubic Shells
In this section, we observe some general properties of hypercubic shells enclosing a set of points. Let be an integer, being a constant, and be a set of points in .
Let be the smallest axis-aligned box, or hyperrectangle, that encloses , that is,
[TABLE]
Let be the length of the longest sides of , and without loss of generality, we assume that the sides of with length are parallel to the -axis. Consider the hyperplane orthogonal to the -axis that halves . Again, we assume that contains the origin , i.e., coincides the -hyperplane, which can be easily achieved by a translation of along the -axis. See Figure 2(a) for an illustration for .
We then consider any smallest axis-aligned hypercube that encloses . Let be the set of centers of all such smallest hypercubes that enclose .
Lemma 2
We have and forms a -dimensional box in . Therefore, a hypercube is a smallest hypercube enclosing if and only if for some .
- *Proof. *
*Let is any smallest axis-aligned hypercube that encloses . Since the side length of is , its center should lie on . Hence, the set of centers of all smallest hypercubes that enclose is a subset of . Furthermore, note that a hypercube encloses if and only if encloses the smallest enclosing box for . This implies that forms a -dimensional box in , which may be degenerate to a box of lower dimension. *
In particular, if , then is the -plane, and forms a rectangle in . See Figure 2 for an illustration.
If we fix a center , then the minimum-width cubic shell enclosing is uniquely determined as follows: Since the outer cube of should enclose all points of , we have with ; while the interior of the inner cube of should avoid , we have with .
For , Gluchshenko et al. [10] proved that there always exists a minimum-width square annulus enclosing such that its center lies in . Here, we generalize this observation into higher dimensions.
Lemma 3
There exists a minimum-width hypercubic shell enclosing centered at some .
- *Proof. *
Consider any minimum-width hypercubic shell enclosing for . That is, the center minimizes the width of over all . Let and be its outer and inner hypercubes. Note that and . If , then we are done.
Suppose that . Then, by Lemma 2, is not a smallest enclosing hypercube for . Thus by Lemma 1, there is no pair of parallel facets of both of which contain a point of . On the other hand, for each pair of parallel facets of , at least one should contain a point of by our definition of . Summarizing, there are exactly facets of containing a point of and no two of them are parallel. Hence, there is a unique vertex of that is incident to these facets. See Figure 3(a) for an illustration of the case of .
We now try to slide the center of the shell towards . For each on the line segment between and , we define a new hypercubic shell such that its outer hypercube is and its inner hypercube is , where . For any such with , observe that is still a vertex of , avoids the points in from its interior, and the width of is exactly , being the same as that of . As continuously moves from towards , encloses and thus also encloses until another facet of hits the -st point at . Hence, is also another minimum-width hypercubic shell enclosing . See Figure 3(b) for an illustration.
*Finally, we show that . At , observe that has facets containing a point of , so two of the facets should be parallel. Since encloses , we conclude that is a smallest enclosing hypercube for by Lemma 1. Hence, we have by Lemma 2. *
This implies that we can now solve the problem by searching a center in . For each and , define be the distance from to . Consider any minimum-width hypercubic shell centered at . Then, the radius of its outer hypercube is always fixed as . Hence, our problem of computing a minimum-width hypercubic shell enclosing is a bit simplified to the problem of maximizing the radius of inner hypercube:
[TABLE]
That is, we want to find a highest point in the lower envelope of the functions . We define to be the lower envelope of the functions .
Looking into the function , it is defined on the -dimensional space and
[TABLE]
since and so . Observe that the first term is the distance in a -dimensional subspace, while the second term is a constant. Thus, the graph of is an -cone cut by the hyperplane parallel to . See Figure 4 for an illustration. From this graphical intuition, one can easily derive the following properties of function .
Lemma 4
Let . Then, the following hold.
- (1)
is convex. 2. (2)
is piecewise linear with patches, unless . One of the patches forms a -dimensional hypercube in , being parallel to . We call it the plateau of . 3. (3)
Any point on the plateau of is a lowest point in the graph of . That is, the global minimum of is attained at if and only if is a point on the plateau of , or equivalently, .
- *Proof. *
*From the fact that , it is obvious that is convex. The distance function in -dimensional space is convex and piecewise linear with exactly patches. If , then the function adds one more patch to it, which is parallel to . Thus, properties (1) and (2) are true. This patch, called the plateau of , forms the minimum of convex function , so property (3) holds. *
From the above observations on the functions , we can discuss local maxima of their lower envelope .
Lemma 5
Let be a local maximum of on subdomain . Then, either
- (i)
for some , or 2. (ii)
for some , lies in a face of of dimension and there are distinct points such that .
- *Proof. *
We make use of a general theorem on local maxima of the lower envelope of convex functions, which was proved by Bae et al. [6], stated as follows:
() Let be any positive integer. Let be a finite family of real-valued convex functions defined on a convex subset and be their pointwise minimum. Suppose that attains a local maximum at and there are exactly functions such that for each . Then, there exists a -flat222A -flat is an affine subspace of dimension . through such that is constant on for some neighborhood of with .*
Informally speaking, the above theorem tells us that if the number of functions that simultaneously appear on the lower envelope at a local maximum is not enough, then is constant near . See [6] for its proof and discussion.
We apply the above theorem () to our situation. Let be a face of of dimension for . Note that, in particular, if , then is the interior of . Assume that is a local maximum of on . If , then is a vertex of and there must be at least one such that , so we are done. Thus, in the following, we assume .*
Now, assume that there are distinct points such that . If , then this is case (ii) and we are done. Suppose that . Consider the restriction of functions to , for each , also the restriction of to . Let . Note that and for each . Since is a local maximum of , it is also a local maximum of in . Hence, we can apply the theorem (), concluding that is constant near . This implies that every must be constant near since . From the properties of observed in Lemma 4, this is possible only if . So, this is case (i) of the lemma. *
4 Algorithm for the Minimum-Width Cubic Shell
Let be a set of points in . In this section, we present an time algorithm that computes a minimum-width cubic shell enclosing .
The function is piecewise linear of constant complexity, defined on domain , which is a two-dimensional subspace. Thus, one can apply an available machinery that computes the lower envelope of the piecewise linear functions. It was successful for the case of ; it is just computing the lower envelope of line segments in the plane, and can be done in worst-case time using a known algorithm, as shown by Gluchshenko et al. [10]. However, for , it takes time [9] to compute the envelope , and this is too much for us.
We suggest another approach which does not explicitly compute the whole envelope . Here, we consider the case of . Thus, is the -plane and is a rectangle in .
For the purpose, we define for each and
[TABLE]
Note that . Thus, is the distance between and the orthogonal projection of onto , so basically distance between two points in a plane. Let be the width of a minimum-width cubic shell enclosing . As discussed above, we have
[TABLE]
where is the longest side length of the smallest enclosing box for as defined above. Let and be such that . Since unless , Lemma 5 implies the following.
Lemma 6
One of the following cases (i) and (ii) holds:
- (i)
for some . 2. (ii)
is either
- (a)
a point in the interior of such that for some , 2. (b)
a point on an edge of such that for some , or 3. (c)
a vertex of .
- *Proof. *
Recall that maximizes over and , so is a local maximum of in . Hence, we can apply Lemma 5 for .
Suppose that we are not in case (i) of the lemma, in which we have for some . In other words, we suppose that for all . Note that this implies that for all , as discussed above. This also excludes case (i) of Lemma 5, so this should be case (ii) of Lemma 5. Specifically, it holds that for , lies in a -face of and there are distinct points such that
[TABLE]
There are three cases according to the dimension of the face in which lies.
- (a)
If lies in a -face of , or the interior of , then there are three points such that . Since for all , we have . 2. (b)
If lies in a -face, or an edge, of , then there are two points such that . Since for all , we have . 3. (c)
If lies in a [math]-face, then is a vertex of .
*Hence, the lemma follows. *
Our algorithm computes and a corresponding center such that by separately handling two cases (i) and (ii) of Lemma 6. For case (i), let be the largest value in such that there exists a cubic shell of width and center that encloses . If the solution falls in case (i), then it should hold that .
For case (ii), any point is called a candidate center if it satisfies the condition of case (ii); more precisely, if is either
- (a)
a point in the interior of such that for some , 2. (b)
a point on an edge of such that for some , or 3. (c)
a vertex of .
Let be the set of all candidate centers, and let and be such that . If the solution and does not fall in case (i), then we will have .
Our algorithm thus computes and and then by Lemma 6. Hence, we are done by reporting and its corresponding center and cubic shell. Note that the width of the minimum-width shell is .
In the following, we describe how to handle each case and compute and .
4.1 Case (i)
Note that there are only candidate values for . Here, we consider the following decision problem:
given a real , is there a cubic shell enclosing with width at most and center in ?
This is equivalent to deciding if the sublevel set of covers , where
[TABLE]
that is, whether or not .
For a given real number and any , if and only if there exists a point such that . Since , the above condition is again equivalent to for some or , where denotes the interior of . Hence, is indeed the intersection of the union of cubes by .
Let be the intersection of the ball by . We then have
[TABLE]
Note that is either empty if , or a square of radius .
After specifying for each , we can explicitly compute the union of squares of equal radius . It is well known that the complexity of the union of squares is [7], and one can compute it in time by a standard plane-sweep algorithm. We then intersect by . If there is a point such that , then we have and thus the cubic shell centered at has width at most , so we report that there exists a cubic shell of width enclosing . Otherwise, if , then there is no such shell.
Thus, we conclude the following.
Lemma 7
Given a set of points in and a real , we can decide if there exists a cubic shell enclosing of width in time in the worst case. If exists, such a cubic shell can be output in the same time bound.
After sorting in time, we can find the biggest value for which the above decision algorithm returns “yes” in time by a binary search. Such a point that can also be found in the same time bound.
4.2 Case (ii)
Next, we describe how to compute and . As defined above, is the set of all candidate centers. Again, recall that is equivalent to the distance in the plane between the projection of onto and a point . This means that each candidate center is, unless it is a vertex of , a point on the locus of equidistant points from two or more points in on the plane under the distance. This naturally suggests an application of the Voronoi diagram in the plane .
For each , let be the orthogonal projection of onto the plane , and . Let be the Voronoi diagram for points on , that is, the decomposition of into vertices, edges, and cells, each of which is the set of points having a common set of nearest points in under the distance. It is well known that consists of vertices, edges, and faces, and can be computed in time . In particular, we have the following:
- (a)
A point is a vertex of if and only if we have three nearest points so that . 2. (b)
A point lies on an edge of if and only if we have exactly two nearest points so that .
This gives us a necessary condition of candidate centers.
Lemma 8
Let be a candidate center. Then, is either a vertex of , an intersection of an edge of and an edge of , or a vertex of .
- *Proof. *
*By definition, any candidate center should satisfy either (a) there are three points such that , (b) is a point on an edge of and there are two points such that , or (c) is a vertex of . From the property of the Voronoi diagram discussed above, in case (a), is a vertex of ; in case (b), is also a point on an edge of . Hence, the lemma is proved. *
Now, we are ready to describe our algorithm computing : We first compute and then compute the intersection points between edges of and edges of . Initially, we let include all vertices of , all intersection points between an edge of and an edge of , and all vertices of . By Lemma 8, contains all candidate centers. For each , test if for every nearest point from among . This test can be done in time since stores nearest points for each vertex, edge, and cell. If the test is passed, is a candidate center by definition and so we keep in ; otherwise, we discard and remove from . Now, consists of all candidate centers. Note that if is a candidate center, it holds that for each nearest point from . We then pick a candidate center such that . All the effort to compute and is bounded by time.
Summarizing, we handle two cases (i) and (ii) of Lemma 6 separately, computing and , and choose the bigger one as . Then, a minimum-width cubic shell enclosing is obtained from the corresponding center and the radii and of its outer and inner cubes.
Theorem 2
Let be a set of points in . A minimum-width cubic shell enclosing can be computed in time in the worst case.
5 Minimum-Width Hypercubic Shell
Our approach for cubic shells in easily extends to hypercubic shells in for . In this section, let be a constant.
As done for , we define
[TABLE]
Note that and unless . Thus, is the distance between and the orthogonal projection of onto , so the distance between two points in the -dimensional space. Let be defined as above. So, we have an analogue of Lemma 6.
Lemma 9
- (i)
for some , or 2. (ii)
is a point in a face of of dimension with and for distinct points .
- *Proof. *
The proof is almost identical to that of Lemma 6. Since is a local maximum of in , we can apply Lemma 5 for .
Suppose that we are not in case (i) of the lemma, in which we have for some . In other words, we suppose that for all . Note that this implies that for all , as discussed above. This also excludes case (i) of Lemma 5, so this should be case (ii) of Lemma 5. Specifically, it holds that for , lies in a -face of and there are distinct points such that
[TABLE]
*Since we have for all , this implies that , as claimed. *
As done for , our algorithm computes and a corresponding center such that by separately handling two cases (i) and (ii). Each case is also handled similarly: we define and analogously. In particular, a point is called a candidate center if lies in a -face of for and there are distinct points such that .
For our algorithm for , an essential tool is again the Voronoi diagram in dimensional space . The diagram decomposes into faces of dimension such that each -face of is the maximal set of points having a common set of nearest points in . Fortunately, Boissonat et al. [7] proved the following:
Lemma 10** **(Boissonat et al. [7])
The Voronoi diagram of points in dimension has complexity and can be computed in expected time.
We again handle each case separately.
5.1 Case (i)
We again consider the decision problem, and solve it by testing . The only difference is that is now the union of -dimensional hypercubes for in .
It is known by Boissonat et al. [7] that the union of hypercubes of equal radius in dimension has complexity for . We can compute the union of hypercubes in by using the -dimensional Voronoi diagram.
Lemma 11
Let be a set of hypercubes of equal radius in dimensional space. Then, their union can be computed in expected time.
- *Proof. *
Let be the radius of hypercubes in , and be the set of centers of hypercubes in . Let be their union . We compute using the Voronoi diagram . Note that, for each point , it holds that , since each is for some .
We first compute the Voronoi diagram . This takes expected time by Lemma 10. Then, for each face of , we compute the set of points such that for every . Note that the set of common nearest points for face consists of points, if is a -face, and is just the intersection
[TABLE]
*of hypercubes and the face . Since the complexity of is , this iteration is done in time . Since the faces of form a (disjoint) decomposition of the space, we have . Thus, we can compute the union in the claimed time. *
After specifying for each , we collect at most hypercubes of dimension and compute their union by the algorithm of Lemma 11. Then, we intersect by . Since the complexity of is bounded by , this can be also done in the same time bound. If there is a point such that , then we have and thus the hypercubic shell centered at has width at most , so we report that there exists a hypercubic shell of width enclosing . Otherwise, if , then there is no such shell.
Thus, we conclude the following.
Lemma 12
Let be a constant. Given a set of points in and a real , we can decide if there exists a hypercubic shell enclosing of width in expected time. If exists, such a hypercubic shell can be output in the same time bound.
After sorting in time, we can find the biggest value for which the above decision algorithm returns “yes” in time by a binary search. Such a point that can also be found in the same time bound.
5.2 Case (ii)
In order to compute and for , we show an analogous lemma of Lemma 8.
Lemma 13
Let be a candidate center. Then, is an intersection of a -face of and and a -face of for some .
- *Proof. *
*By definition, any candidate center is a point on a -face of for such that there are distinct points such that . Since , those points are all nearest points in from . From the property of the Voronoi diagram , this implies that lies in a face of of dimension . Hence, is an intersection point of a -face of and and a -face of for some . *
Our algorithm thus computes and intersects it with . Initially, we let be the set of all intersection points between a -face of and a -face of for . Since consists of faces (Lemma 10), consists of at most points. By Lemma 13, it is guaranteed that contains all candidate centers. We then test each if for all nearest points from . This can be done in time by storing the face of that contains and the set of its nearest points. If the test is passed, is a candidate center; otherwise, we discard and remove from . Now, consists of only candidate centers. Note that if is a candidate center and is the face of such that , it holds that for each . Thus, we can find and simply taking the maximum . The time consumed in this process is bounded by expected time for computing by Lemma 10.
Finally, we conclude the following.
Theorem 3
Let be a constant integer and be a set of points in . Then, a minimum-width hypercubic shell enclosing can be computed in expected time.
6 Concluding Remarks
We addressed the minimum-width cubic and hypercubic shell problem in high dimension, generalizing the square annulus problem. Our algorithm runs in worst-case time for the cubic shell and expected time for the hypercubic shell in for . It would be worth mentioning that the currently best time bound holds for any . Theorems 2 and 3, together with the result in [10], are summarized into the following corollary.
Corollary 1
Let be any constant integer, and be a set of points in . Then, a minimum-width hypercubic shell enclosing can be computed in time.
There are several open questions. In particular for , our algorithm runs in time. Is it possible to reduce the time bound to ? As Gluckshenko et al. [10] proved a lower bound of for , the same lower bound applies to the case of .
A bottleneck of our algorithm for is the decision algorithm that takes time and the binary search using it. One could try to apply the parametric search technique, while it seems nontrivial to devise a proper parallel algorithm.
Another interesting question would be about the lower envelope of functions . What is the correct complexity of the lower envelope of functions ? We tried to obtain a nontrivial upper bound, i.e., a subquadratic bound for , on the complexity of , but failed. Note that the corresponding minimization diagram on coincides the intersection of a -dimensional Voronoi diagram by an axis-aligned hyperplane .
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] M. Abellanas, F. Hurtado, C. Icking, L. Ma, B. Palop, and P. Ramos. Best fitting rectangles. In Proc. Euro. Workshop Comput. Geom. (Euro CG 2003) , 2003.
- 2[2] P. Agarwal and M. Sharir. Efficient randomized algorithms for some geometric optimization problems. Discrete Comput. Geom. , 16:317–337, 1996.
- 3[3] P. Agarwal, M. Sharir, and S. Toledo. Applications of parametric searching in geometric optimization. J. Algo. , 17:292–318, 1994.
- 4[4] P. K. Agarwal, B. Aronov, S. Har-Peled, and M. Sharir. Approximation algorithms for minimum-width annuli and shells. Discrete Comput. Geom. , 24(4):687–705, 2000.
- 5[5] S. W. Bae. Computing a minimum-width square annulus in arbitrary orientation. Theoret. Comput. Sci. , 718:2–13, 2018.
- 6[6] S. W. Bae, M. Korman, and Y. Okamoto. The geodesic diameter of polygonal domains. Discrete Comput. Geom. , 50(2):306–329, 2013.
- 7[7] J.-D. Boissonnat, M. Sharir, B. Tagansky, and M. Yvinec. Voronoi diagrams in higher dimensions under certain polyhedral distance functions. Discrete Comput. Geom. , 19(4):485–519, 1998.
- 8[8] T. Chan. Approximating the diameter, width, smallest enclosing cylinder, and minimum-width annulus. Int. J. Comput. Geom. Appl. , 12:67–85, 2002.