A monotonicity result under symmetry and Morse index constraints in the plane
Francesca Gladiali

TL;DR
This paper proves a monotonicity and symmetry result for solutions of semilinear elliptic equations in symmetric plane domains, linking Morse index constraints to solution symmetry or monotonicity properties.
Contribution
It establishes a new monotonicity and symmetry theorem for solutions with bounded Morse index under rotational symmetry constraints in the plane.
Findings
Solutions are either radial or symmetric with respect to a direction and monotone in an angular sector.
The result applies to least-energy and nodal least-energy solutions.
Produces multiplicity results for solutions under symmetry constraints.
Abstract
This paper deals with solutions of semilinear elliptic equations of the type \[ \left\{\begin{array}{ll} -\Delta u = f(|x|, u) \qquad & \text{ in } \Omega, \\ u= 0 & \text{ on } \partial \Omega, \end{array} \right. \] where is a radially symmetric domain of the plane that can be bounded or unbounded. We consider solutions that are invariant by rotations of a certain angle and which have a bound on their Morse index in spaces of functions invariant by these rotations. We can prove that or is radial, or, else, there exists a direction such that is symmetric with respect to and it is strictly monotone in the angular variable in a sector of angle . The result applies to least-energy and nodal least-energy solutions in spaces of functions invariant by rotations and produces multiplicity results.
Click any figure to enlarge with its caption.
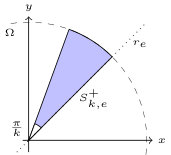 Figure 1
Figure 1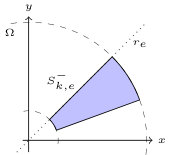 Figure 2
Figure 2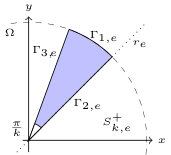 Figure 3
Figure 3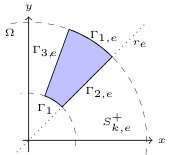 Figure 4
Figure 4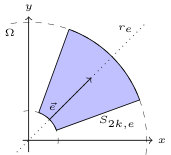 Figure 5
Figure 5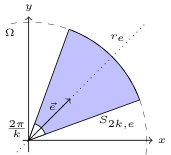 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
A monotonicity result under symmetry and Morse index constraints in the plane
Francesca Gladiali
Dipartimento di Chimica e Farmacia, Università di Sassari, via Piandanna 4, 07100 Sassari, Italy. [email protected]
Abstract.
This paper deals with solutions of semilinear elliptic equations of the type
[TABLE]
where is a radially symmetric domain of the plane that can be bounded or unbounded. We consider solutions that are invariant by rotations of a certain angle and which have a bound on their Morse index in spaces of functions invariant by these rotations. We can prove that or is radial, or, else, there exists a direction such that is symmetric with respect to and it is strictly monotone in the angular variable in a sector of angle .
The result applies to least-energy and nodal least-energy solutions in spaces of functions invariant by rotations and produces multiplicity results.
This work was supported by Gruppo Nazionale per l’Analisi Matematica, la Probabilità e le loro Applicazioni (GNAMPA) of the Istituto Nazionale di Alta Matematica (INdAM), by Prin-2015KB9WPT and by Fabbr.
Keywords: semilinear elliptic equations, symmetry and monotonicity results, bounded and unbounded domains, linearized equation, first eigenvalue and first eigenfunction, Morse index.
1. Introduction
In this paper we study symmetry and monotonicity properties of classical solutions of semilinear elliptic problems of the type
[TABLE]
where is a radially symmetric domain of which can be bounded, in which case is either a ball or an annulus centered at the origin, or can be unbounded in which case either or . When is a ball , an annulus or an exterior domain we also assume that satisfies Dirichlet boundary conditions
[TABLE]
Throughout the paper is (locally) a -function whose first derivative with respect the second variable, that we denote hereafter , belongs to .
When is a ball and is nonicreasing in the radial variable, positive solutions to (1.1) and (1.2) are radially symmetric by the well known results of [GNN] where the moving plane method has been employed. Similar results hold also when at least under some decay assumption at infinity, see [GNN2] or under some summability conditions as in [CL]. However, when is not convex or when depends increasingly on the radial variable or when is a sign changing solution, the symmetry of all solutions does not hold anymore and indeed, in each of these cases, there are examples where radial and nonradial solutions coexist. We quote here the seminal paper [SSW] dealing with positive solutions of the Hénon problem, where for and in a ball, and it is proved that least energy solutions, namely solutions which minimize the energy functional, are nonradial provided is large enough. This symmetry breaking result is stated in dimension , but it holds also in the plane as one can see in the examples in Section 6. Nonradial positive solutions have been found also in an annulus and one can see the papers [BN], [C], [L] and [GGPS]. Also least energy nodal solutions are nonradial, when is bounded as proved in [AP].
Nevertheless in some situations, or for a certain class of solutions, it is natural to expect that solutions inherit some of the symmetry of the domain, even if is not convex, changes sign and is increasing in the radial variable. This is indeed the case for solutions of low Morse index, under some convexity assumption on that we shall make clear very soon, and it has been proved in [P] and [PW] when is bounded, and in [GPW] when is unbounded, that every solutions to (1.1) (and possibly (1.2)) of low Morse index is axially symmetric with respect to an axis passing through the origin and nonincreasing in the polar angle from this axis, i.e. only depends on and , for a certain unit vector , and is nonincreasing in . This kind of symmetry is often called foliated Schwarz symmetry. See also the papers [DP], [DGP1] and [DGP2] where some extensions to the case of systems are considered.
The foliated Schwarz symmetry for minimizers of certain variational problems has been obtained in [SW] for positive solutions and in [BWW] in the case on nodal solutions, using a completely different method based on symmetrization techniques.
Let us recall that the Morse index of a solution to (1.1) is the maximal dimension of a subspace of in which the quadratic form
[TABLE]
associated to the linearized operator
[TABLE]
is negative defined. Here and in the following by we mean .
In this paper we are interested in solutions which admit some invariances, namely they belong to suitable symmetric spaces, in the case when is contained in the plane. Inspiring to the previous depicted papers [PW] and [GPW] we consider solutions which have low Morse index in these symmetric spaces and we prove, that under some convexity assumptions on or they are radial or they inherit only one extra-symmetry among the ones they can possess. This extra-symmetry of low Morse index solutions is what we think is the right generalization to the foliated Schwarz symmetry to this symmetric setting.
Entering the details let us explain which type of symmetric spaces we are concern with. To this end, for any angle we denote by the rotation of angle in counterclockwise direction centered at the origin and by the subgroup of generated by . In particular we consider angles with , , so that is a proper subgroup of . We say that a function defined in is -invariant if it satisfies
[TABLE]
Next we denote by the -invariant Morse index of , namely the maximal dimension of a subspace of , i.e. the subspace of given by functions that satisfy (1.3), in which the quadratic form is negative defined.
Since we are considering functions that satisfy (1.3) it is enough to know them in any sector of of angle . Then, for any direction , being the unit sphere, we denote by the sector of of angle , centered in the origin which has the straight line of direction passing through the origin, that we call , as symmetry axis and lies in the halfplane , see Fig. 1.
In order to state our results we also need to introduce the two semisectors and that cover and which are the part of on one side of and on the other side respectively, see Fig. 2 and see Section 2 where they are defined in a rigorous way.
Now we can state the main results of this paper. In particular we can prove the following result for solutions of low Morse index, in the case when the nonlinear term is convex in the second variable:
Theorem 1.1**.**
Assume is bounded. Let be a solution to (1.1) and (1.2) that satisfies (1.3) and such that
[TABLE]
Suppose is convex in the -variable. Then, or is radial or else there exists a direction such that is symmetric with respect to in the sector and it is strictly monotone in the angular variable in the sectors and .
Also in the case when the nonlinear term has a first derivative convex in the second variable we can prove an analogous result:
Theorem 1.2**.**
Assume is bounded. Let be a solution to (1.1) and (1.2) that satisfies (1.3) and such that
[TABLE]
Suppose has a convex derivative . Then, or is radial or else there exists a direction such that is symmetric with respect to in the sector and it is strictly monotone in the angular variable in the sectors and .
To our knowledge this is the first general result in this direction, i.e. in showing that solutions, constraint with some invariances, when they are nonradial, inherit a symmetry axis in their free sector , but they repulse additional symmetries, favoring the strict angular monotonicity in their free semisectors . It seems that this symmetry in and monotonicity in is the exact generalization of the foliated Schwarz symmetry to the case of -invariant functions or to the case of sectors.
Let us explain the difficulties of the achievements. As in the previous papers the convexity assumptions on are needed in order to compare the quadratic form with the quadratic form associated with the equation satisfied by the difference of two solutions to (1.1). In particular we compare a solution with its reflection with respect to in the sector and we move the direction .
Next, the assumption on the -Morse index of allows to say that at least in one of the semisectors , for a suitable direction , the first eigenvalue of the linearized operator is nonnengative. This implies that the angular derivative of in this sector or it is zero or it has a sign. However it is possibile to prove that the first eigenvalue is nonnegative only when is symmetric with respect to in so that the solution when nonradial admits this extra-symmetry.
Let us note in particular that the proof of Theorem 1.2 is technically complicated when and also the sectors of amplitude play an important role.
As one can see in the applications in Section 6 the assumption is not very restrictive and allows to treat the case of solutions of variational problems which minimizes the energy functional associated with (1.1) constraint either on the Nehari manifold or on the nodal Nehari manifold in the case of solutions that change sign. So also nodal solutions can be considered. According to the previous results in [PW] and [GPW] we believe moreover that this assumption should be optimal and that allowing a higher -Morse index would produce more symmetries in the sectors .
Note that the convexity assumption of Theorem 1.1 is satisfied by the exponential nonlinearities of Gelfand type, i.e., and, for by the Lane-Emden type, i.e. for and by their extension of Hénon type, namely and for .
The convexity assumption in Theorem 1.2, instead, allows to deal with nodal solutions to the Lane-Emden problem, for and with positive or nodal solutions to the sinh-Poisson problem, namely when as well as their extensions of Hénon type. Section 6 provides a broad range of problems that satisfy the convexity assumptions and to which these topics can be applied and some multiplicity results are produced.
Finally in the case when the domain is not bounded we can prove the same type of monotonicity results.
Theorem 1.3**.**
Assume is unbounded. Let be a solution to (1.1) and possibly (1.2) that satisfies (1.3) and such that and
[TABLE]
Assume further that or are convex in the second variable. Then, or is radial or else there exists a direction such that is symmetric with respect to in and it is strictly monotone in the angular variable in the sectors and .
Let us remark that very few results are available when depends on the radial varaibale, or when the solutions change sign or when the underlying domain is and we think that Theorem 1.3 is a first step in this direction.
When passing from the bounded to the unbounded case we have to take into account either the fact that the first eigenvalue and the first eigenfunction is not defined anymore in an unbounded domain either that some of the functions constructed do not have the right sommability. Then we have to divide the problem considering first a bounded section of the sectors and then looking at the unbounded part of the sectors. In this last issue it is important that, in a certain sense, the bound on the -Morse index, means that the maximum principle should hold in the unbounded part.
Finally let us observe that we are confident that similar results should hold also in higher dimensions. Nevertheless while the -invariance in (1.3) is very natural for solutions in a radially symmetric domain of the plane, since they are the same invariances of the Spherical Harmonics, in higher dimension the Spherical Harmonics are far more complicated and many different invariances should be taken into account.
2. Notations and preliminary results
In this section we introduce all the notations we need to prove the main Theorems and we give some preliminary results in the case when is bounded. Let us denote by any direction, with whose orthogonal vector is given by , and by or the straight line passing through the origin of direction , namely .
Let be the reflection with respect the line , i.e. for every and, if is any solution to (1.1) we let
[TABLE]
the difference between the reflection of with respect to and .
Since we are interested in solutions with some invariances, as explained in the Introduction, for any angle we denote by the rotation of angle in counterclockwise direction centered at the origin and by the subgroup of generated by . In particular we consider angles with , , so that is a proper subgroup of . Note that for , is the trivial subgroup.
We say that a function defined in is -invariant if it satisfies
[TABLE]
Since we will consider functions in that satisfy (1.3) it is enough to know them in any sector of of angle . Then, for any direction we denote by the circular sector of of angle , centered in the origin which has has symmetry line and lies in the halfplane , see Fig. 1 in the Introduction.
In order to understand the behavior, and the symmetries of the solutions we need to work also in sectors of amplitude and so, for any , such that we let
[TABLE]
and by
[TABLE]
see Fig. 2 in the Introduction. Observe that where is contained in , is contained in while is contained in the line if , see Fig. 3.
When we will use also the notation , , and to denote respectively , , and .
By elliptic regularity theory for some . In particular for some . We can then define the linearized operator at a solution
[TABLE]
and, for any the quadratic form associated with in , namely
[TABLE]
which is defined for . Next, for any direction and for any we denote by
[TABLE]
[TABLE]
and by
[TABLE]
the corresponding linear operators, which are associated with the quadratic forms
[TABLE]
For any , the function satisfies
[TABLE]
Moreover on and on by construction. Further, if satisfies (1.3) then also on by the rotation invariance of , showing that for any , on and on .
Observe also that, if in then in .
Next, for any and for any linear operator we denote by the first eigenvalue of the linear operator in with Dirichlet boundary conditions.
First we can prove the following
Proposition 2.1**.**
Assume is bounded. Let be a solution to (1.1) and (1.2) that satisfies (1.3). Suppose further that there exists a direction such that
[TABLE]
Then there exists another direction such that in (i.e. in ) and
[TABLE]
Proof.
We can assume w.l.o.g. that in and that, up to a rotation, with . Now we consider other directions for . Note that, if in for some then , since solves in and on by previous considerations. Next we define
[TABLE]
By continuity and in . This implies that , because, by the rotation invariance of , we have in .
We would like to prove that in .
Assume, by contradiction, that . Then, necessarely in . Indeed, by definition of we have , and since satisfies then the strong maximum principle implies the assertion.
Now let be a compact set such that has small measure to allow the weak maximum principle hold for the operator in for sufficiently small .
Since in for some , then
[TABLE]
for sufficiently small , while
[TABLE]
by the weak and the strong maximum principle in .
Therefore in contradicting the definition of . Hence must be identically zero in . This implies that concluding the proof. ∎
Next we have
Proposition 2.2**.**
Assume is bounded. Let be a solution to (1.1) and (1.2) that satisfies (1.3). Suppose further that there exists a direction such that in and
[TABLE]
Then or is radial or it is strictly monotone in the angular variable in .
Proof.
We can assume w.l.o.g. that and we use the polar coordinates . As said before, if solves (1.1) then and the derivative of with respect to the angular variable , that we denote , satisfies
[TABLE]
Moreover on , since satisfies zero Dirichlet boundary conditions on , and on the by the symmetry of with respect to . Further, the symmetry of with respect to together with the invariance by rotations of angle implies also that is symmetric with respect to the line which is part of the boundary of . Hence also on meaning that on .
Now, since we have or that in , meaning that is radial, or, else that , which is nonzero, is a first eigenfunction of in and so it has one sign in , namely it is positive or negative in . This shows that if is not radial it is strictly monotone in the polar angle and concludes the proof. ∎
By the symmetry assumption on , whenever is nonradial then it is strictly monotone in the polar angle also in the sector .
Next, for every real valued function , we let and denote the positive and negative part of , respectively. For every , stands for the characteristic function of . If is a domain, we let denote the space of all -functions on with compact support strictly contained in .
Finally, as explained in the Introduction, we denote by the -Morse index of , namely the maximal dimension of a subspace of in which the quadratic form is negative defined. Equivalently, when is bounded, it is the number, counted with multiplicity, of the negative eigenvalues of with corresponding eigenfunction -invariant.
3. The case of convex
In this section we prove the monotonicity and symmetry results in the case when is bounded and is convex with respect to the second variable. Under this assumption
[TABLE]
and, for any direction , the function satisfies the inequality
[TABLE]
and also the boundary conditions on . First we prove the following
Lemma 3.1**.**
Assume is bounded. Assume further that one among and is nonnegative. Then or in and or has a sign in .
Proof.
We can assume w.l.o.g. that .
If in then we are done. Assume else that in . We want to prove that has a sign in . Assume not, then , and on , since on by previous considerations. Multiplying (3.1) by and integrating over we have
[TABLE]
which, together with the relation implies
[TABLE]
meaning that reaches the infimum of in and hence it solves
[TABLE]
Now, since the strong maximum principle implies either that in , which is not possible by assumption, or that in which implies . This concludes the proof. ∎
We are now in position to prove the main point:
Proposition 3.2**.**
Assume is bounded. Let be a solution to (1.1) and (1.2) that satisfies (1.3) and such that . Then there exists a direction such that, or in and or has a sign in .
This proposition, together with Propositions 2.1 and 2.2 then implies Theorem 1.1 and concludes this case.
Proof.
Let us denote by and two -invariant eigenfunctions of the linearized operator orthogonal in corresponding to the two negative eigenvalues.
For any direction let us denote by the unique first positive eigenfunction of in with Dirichlet boundary conditions, which corresponds to and by the unique first positive eigenfunction of in with Dirichlet boundary conditions, which corresponds to , normalized such that and by their extension in all of by the invariance by rotations of angle . We want to prove that there exists a direction for which at least one, among and is nonnegative, so that the result follows by Lemma 3.1.
Define the function
[TABLE]
which is supported in , and denote by its extension in all of by the invariance by rotations of angle . Then, by construction
[TABLE]
which means that is orthogonal in to for every . Assume , with . Let us consider the map
[TABLE]
which is continuous with respect to the angle . Here stands for . We want to prove that there exists such that . If then we are done. If else , observe that and that can be obtained rotating the sector by , namely . Then by the uniqueness of the first positive eigenfunction of norm and .
Moreover
[TABLE]
where we used the fact that is -invariant. In the same manner
[TABLE]
It is then easy to see that , that implies since is -invariant. Since is a continuous function then it has one zero between [math] and . This means that there exists a direction such that is orthogonal to in , since . Since and are -invariant and then
[TABLE]
Finally by the definition of we have
[TABLE]
from which it follows that al least one among and is nonnegative. ∎
Remark 3.3**.**
*When a -invariant solution is not radial, then, by Theorem 1.1 it is symmetric with respect to a direction in and by the invariance (1.3) it is symmetric also with respect to the directions and also for . Moreover in each sector it is strictly monotone with respect to the angular variable and consecutive sectors see the angular derivative change sign.
Then, the maxima and minima of either belong to the symmetry axes or they are placed in the origin. Both this configurations can appear, in particular for sign changing solutions. Indeed a nodal -invariant solution can have, as an example, either maxima and minima placed alternately along the directions at an angular distance of , or else only maximum in the origin and minima placed along the directions at an angular distance of .*
4. the case of convex
In this section we consider the case when is convex with respect to the second variable and we prove Theorem 1.2. Under this assumption we have for any
[TABLE]
First, we can prove the following:
Proposition 4.1**.**
Assume is bounded. Let be a solution to (1.1) and (1.2) that satisfies (1.3) and such that . Suppose further that is convex with respect to the second variable. Then there exists a direction such that, or in and or has one sign in .
This proposition, together with Propositions 2.1 and 2.2 then implies Theorem 1.2 and concludes this case.
Proof.
Let us denote by and two k-invariant eigenfunctions of the linearized operator , orthogonal in , corresponding to the two negative eigenvalues.
Define
[TABLE]
Case 1:
Assume by contradiction that for every the function changes sign in . In this case for every we can define the functions
[TABLE]
which are supported in .
Observe that and are both nonnegative in , have disjoint supports and satisfy on and also on . Moreover for .
Further, since satisfies in and on , multiplying by and integrating over we obtain
[TABLE]
Then, (4.1), together with , gives
[TABLE]
where we are denoting by the quadratic form associated with the operator in . Similarly we can show
[TABLE]
Let us denote by the extension of in all by the invariance by rotations of angle . For every we can define the function
[TABLE]
which is supported in and denote by its extension in all of by the invariance by rotations of angle . Then, by construction
[TABLE]
and
[TABLE]
since and have disjoint supports. Assume , with . Let us consider the map
[TABLE]
which is continuous with respect to the angle . Here stands for .
We want to prove that there exists such that . If then we are done. If else as in the proof of Proposition 3.2 we have and . Observe that, for ,
[TABLE]
since is -invariant, while, for
[TABLE]
for . From this it follows that
[TABLE]
and
[TABLE]
This implies that
[TABLE]
where we used the -invariance of , and, in the same manner
[TABLE]
It is then easy to see that , that implies, together with , that .
Since is a continuous function then it has one zero in . This means that there exists a direction such that is orthogonal to in , since . Since and are -invariant and then
[TABLE]
which, together with (4.4) implies that is a minimizer for in the space of functions -invariant and hence, by the principle of symmetric criticality of [Pa], weakly solves in and also in . Recall that on and since for any (by the symmetry of ), then on , where denotes the inner normal derivative on . But, this implies that the function
[TABLE]
is also a weak solution to in , contradicting the unique continuation principle for this equation. The only possibility is that which is not possible since we are assuming that changes sign in .
Case 2: .
Let us assume that , so that in . By the symmetry of we also have that .
Let us denote by the unique first positive eigenfunction of in with Dirichlet boundary conditions, which corresponds to normalized such that , by its odd extension on , and by its extension in by the invariance by rotations of angle .
It is easy to see that
[TABLE]
Moreover, by the symmetry of in we have
[TABLE]
since we are assuming that .
To conclude we want to show that, when we consider the direction (which divides into two equal parts), then we must have either that in either in or, else, that in and .
i) First we show that whenever in then .
Suppose by contradiction that . Since is symmetric with respect to , namely in , and since divides the sector into two equal parts, then the first eigenfunction in is symmetric with respect .
Next we let be the first positive eigenfunction of the linear operator in the sector with Dirichlet boundary conditions, which corresponds to normalized such that , by its odd extension on , and by its extension in by the invariance by rotations of angle . Again by the symmetry of we have that in . Then
[TABLE]
where
[TABLE]
since is odd with respect while is even with respect to . Next
[TABLE]
since for . Similarly
[TABLE]
so that is orthogonal to and to in . By assumption then we have
[TABLE]
which contradicts the bound on the -Morse index. This shows that whenever in , then and concludes this part.
ii) It lasts to prove that whenever in , then the function cannot change sign in . Assume by contradiction that it changes sign. We can then define the functions and as in (4.3) relative to the direction , which are nonnegative, symmetric with respect to and satisfies
[TABLE]
Moreover, by the symmetry of we have that which implies that . Next we construct as before the function , and which, again satisfies by construction and also
[TABLE]
Further is orthogonal to by construction and is orthogonal to since the first is even with respect to while the second is odd. Since and and are -invariant and then
[TABLE]
which, together with (4.7) implies that is a minimizer for in the space of -invariant functions, and, as before, solves in and also in . Then we can conclude defining the function as in (4.6) as in the end of the proof of case 1 showing that it is not possible that changes sign in . ∎
Of course Remark 3.3 holds also in this case.
5. Unbounded domains
In this section we extend the previous results to the case of an unbounded radial domain , where either coincides with or , extending some ideas in [GPW] to the case of functions which are -invariant.
As before we denote by the subset of of functions that satisfy (1.3).
To prove the results we only highlight the difference between the bounded case. First we can prove an extension of Proposition 2.2, namely
Proposition 5.1**.**
Assume is a solution to (1.1) and possibly (1.2) that satisfies (1.3) and such that . Suppose further that there exists such that in and
[TABLE]
Then or is radial or it is strictly monotone in the angular variable in .
Proof.
As in the proof of Proposition 2.2 we have that the angular derivative satisfies
[TABLE]
We claim that either in showing that is radial or, else, has a sign in .
Using a radial cut-off function supported in and reasoning exactly as in the proof of Proposition 2.5 of [GPW] we can prove that in this case the function satisfies
[TABLE]
for any , meaning that , if it is nonzero, solves
[TABLE]
and by the unique continuation principle or or in concluding the proof. ∎
By the symmetry assumption on , whenever is nonradial then it is strictly monotone in the polar angle also in the sector .
Moreover, when or are convex in the second variable we can extend also Proposition 2.1, getting the following result:
Proposition 5.2**.**
Assume is a solution to (1.1) and possibly (1.2) that satisfies (1.3) and such that and . Suppose furthermore that or are convex in the second variable and that there exists a direction s.t.
[TABLE]
Then there exists another direction s.t. and
[TABLE]
Proof.
We define as in (2.4) and we want to prove that in . Indeed (5.1) follows as in Proposition 2.1 using Lemma 2.1 in [GPW]. The proof follows very closely the one in Proposition 2.8 of [GPW], adapted to the case of the sector as in Proposition 2.1.
Assume by contradiction that in . Then necessarily in by the strong maximum principle. Moreover applying the Hopf Lemma on the straight lines and , where vanishes we have:
[TABLE]
where denotes the angular variable in polar coordinates. Since by hypothesis , there exists such that for every that satisfies (1.3) and every . Then also for every and every which implies that for every and every .
We fix and we claim that there exists such that
[TABLE]
In the case let be a neighborhood of in of small measure, in case of instead let be a neighborhood of the origin of small measure. The measure of in both cases is so small to allow the strong maximum principle to hold in for the operator for sufficiently small . We first show that
[TABLE]
If (5.4) is not true we have sequences , such that . After passing to a subsequence, and , hence . Assume, without l.o.g. . Since on and , there should be points on the line segment joining with and perpendicular to , such that . Passing to the limit we get in contradiction with (5.2). So we get (5.4).
By the strong maximum principle, the definition of and (5.4) we get also in and hence (5.3) holds.
It lasts to prove that also in for all . We recall that satisfies
[TABLE]
By (5.3) the function has its support strictly contained in . We claim that
[TABLE]
We first consider the case where is convex in the second variable, and we let . By previous considerations defines a (semidefinite) scalar product on ), and the corresponding Cauchy-Schwarz-inequality yields
[TABLE]
for all . Consequently, we obtain
[TABLE]
for , where is a cut-off function supported in . By Lemma 2.3 (ii) in [GPW], we have
[TABLE]
so that
[TABLE]
Since was chosen arbitrarily, we conclude that is a solution of
[TABLE]
Then however by the unique continuation principle, since in by (5.3) and . Hence (5.6) holds.
Next we consider the case where is convex in the second variable. Since every function can be extended to an odd function with respect to the reflection at , we have
[TABLE]
for all . Hence defines a (semidefinite) scalar product on , and the corresponding Cauchy-Schwarz-inequality reads
[TABLE]
which by density holds for all vanishing a.e. outside a bounded set. Now we let again . By Lemma 2.3(i) in [GPW], we have
[TABLE]
Combining this with (5.7), we find that
[TABLE]
Since was chosen arbitrarily, we conclude that is a solution of
[TABLE]
As above, this implies (5.6) by the unique continuation principle.
As a consequence of (5.6), we have got in contradicting the definition of . Then the definition of implies that .
∎
In the case where is convex in the second variable then we have:
Proposition 5.3**.**
Assume is a solution to (1.1) and possibly (1.2) that satisfies (1.3) and such that and . Suppose furthermore that is convex in the second variable. Then, or is radial or, else, there exists a direction such that is symmetric with respect to in and it is strictly monotone in the angular variable in the sectors and .
Proof.
We want to prove that there exists a direction such that
[TABLE]
With respect to this direction then, either , and then the monotonicity of follows by Proposition 5.1, or else it can be proved, as in the proof of Theorem 1.4 in [GPW] and as in Proposition 5.2, using the function for a cut off , that has one sign in so that the monotonicity follows by Propositions 5.2 and 5.1.
Suppose that (5.8) does not hold. Then, by Lemma 2.9 of [GPW] there exists such that for any and for every either or . By definition of , is the maximal dimension of a subspace of such that for every .
We take a ball with radius sufficiently large to contain the supports of and and also . We deduce that in the operator admits precisely negative eigenvalues in and the third is nonnengative. Let us denote by and two eigenfunctions of , orthogonal in , corresponding to the negative eigenvalues in .
We then follow exactly the proof of Proposition 3.2 in and we obtain that there exists a direction for which at least one among and is nonnegative obtaining a contradiction. This proves (5.8) and concludes the proof. ∎
In the case when is convex instead we have:
Proposition 5.4**.**
Assume is a solution to (1.1) and possibly (1.2) that satisfies (1.3) and such that and . Suppose furthermore that is convex in the second variable. Then, or is radial or, else, there exists a direction such that is symmetric with respect to in and it is strictly monotone in the angular variable in the sectors and .
Proof.
First we let as in (4.2). Next, as in the proof of the previous Proposition, from , we deduce that there exists such that admits exactly two negative eigenvalues in , for every , with eigenfunctions -invariant while the third eigenvalue is nonnengative. Let and two eigenfunctions -invariant of , orthogonal in corresponding to the negative eigenvalues in , for some . Hence and, extending these functions by zero in
[TABLE]
where the second equality follows by the orthogonality of and in and the fact that solves in .
Case 1:
Assume by contradiction that for every the function changes sign in . We define the functions and as in (4.3). They belong to . Next we need to change a little the proof of Proposition 4.1 in order to deal with the unboundedness of following the proof of Theorem 1.3 in [GPW]. For every we define the function
[TABLE]
which is supported in , and denote by its extension in all of by the invariance by rotations of angle . Then, by construction
[TABLE]
Observe that is well defined since is supported in and and belong to and to respectively.
Since is supported in we can define the function as in (4.5). We then obtain, as in Proposition 4.1, that there exists a direction such that showing that is orthogonal to in , since .
From the definition of -Morse index of it is easy to deduce that for all that satisfies (1.3) which is orthogonal in to and . By density this holds also for functions in vanishing outside a compact set, and so we denote by the subspace of functions in vanishing outside a compact set that satisfies (1.3) which are orthogonal in to and . Hence defines a semidefinite scalar product in with corresponding Cauchy Schwarz inequality
[TABLE]
We now fix and put
[TABLE]
Then and, letting be a cut-off function supported in , we have
[TABLE]
Now, by Lemma 2.3 (i) of [GPW] we have that
[TABLE]
for and, since then by (4.1)
[TABLE]
for , and also
[TABLE]
Combining this with (5.11) we obtain
[TABLE]
which, together with (5.10) gives
[TABLE]
Since is arbitrary, then solves and also in . Then, defining the function as in (4.6) we obtain as in the proof of Proposition 4.1 that , which is possibile, by (5.9), since and have disjoint supports only when , namely
[TABLE]
The -invariance of and then also implies that
[TABLE]
But this is not possible by the same argument in the end of the proof of Theorem 1.3, Case 1, in [GPW] and the contradiction concludes the proof of Case 1.
Case 2:
Let us assume that , so that in . Since, by definition
[TABLE]
then, there exists such that
[TABLE]
For an we define, as in proof of Proposition 4.1, the functions , , . By symmetry reasons is orthogonal to in and satisfies
[TABLE]
To conclude we want to prove that either has a sign in or and
[TABLE]
since the thesis then follows by Propositions 5.1 and 5.2. i) First we show that whenever in then (5.12) holds. Suppose not, then for sufficiently large we have
[TABLE]
By the same arguments of the proof of Proposition 4.1 the function is orthogonal in to and , and satisfies
[TABLE]
contradicting the bound . This shows that, whenever then (5.12) should hold.
ii) It last to prove that, whenever then it has a sign in . Assume by contradiction it changes sign and define the functions and as in (4.3) relative to the direction . Then, as in the proof of Proposition 4.1 the function is orthogonal in to and to . Then the proof follows as in the end of Case 1, where is substituted by getting a contradiction and showing that, in this case, has a sign in . ∎
6. Applications
Let us consider the Lane-Emden problem
[TABLE]
where is a real parameter. In the paper [GGPS] the unique positive radial solution to (6.1) is studied when is an annulus. In particular problem (6.1) admits a unique positive radial solution for every and its Morse index converges to as . This behavior produces infinitely many nonradial positive solutions that arise by bifurcation from the solution . Moreover in [G2] it has been proved that, for every , there exists an exponent at which un unbounded continuum of -invariant solutions to (6.1) bifurcates. This continuum exists for every and all the solutions in it are symmetric with respect to a direction and are monotone in the angular variable in the sectors , by construction. Namely they present the same monotonicity properties that we proved under the -Morse index bound.
It is also proved in [G2], by Morse index considerations, that, letting
[TABLE]
the least energy solution in , that can be found minimizing the Energy functional associated with (6.1)
[TABLE]
on the -invariant Nehari manifold
[TABLE]
is nonradial for every , where is the same as before.
What it lasts to be proved is that these least energy solutions cannot have more invariances, namely they cannot belong to for .
But this can now follows from our results. Indeed a least energy solution satisfies
[TABLE]
so that, by Theorem 1.1, is symmetric with respect to a direction in and it is strictly monotone in the angular variable in so that cannot belong to for .
Summarizing we have:
Theorem 6.1**.**
For any there exists an exponent for which is non radial for any , it is symmetric with respect to a direction and it is strictly monotone in the angular variable in . Moreover for with so that problem (6.1) admits at least positive different solutions.
The solutions in Theorem 6.1 are given by the radial solution , the least-energy solution (corresponding to ) which is the least-energy solution in , the least energy solution and so on until the least energy solution .
This permits to say that the solutions found by bifurcation and the least energy solutions in the symmetric spaces possess the same symmetry and monotonicity properties in the sectors supporting the conjecture that indeed they are the same.
Finally we observe that solutions with a large number of peaks for large values of has been constructed in [EMP] in a more general domain than an annulus via the Lyapunov Schmidt reduction method. We believe that their solutions in the case of an annulus can coincide with ours .
We are confident that a very similar result should hold also for the exponential nonlinearity, namely
[TABLE]
in an annulus, using the asymptotic behavior of the radial mountain pass solution as , performed in [GG]. From this it should follow that the Morse index of converges to as , generating infinitely many nonradial solutions that arise by bifurcation as in the previous case. Applying the Mountain pass Theorem in the spaces then one ends with a -Morse index one positive solution that cannot be radial by Morse index considerations. Then Theorem 1.1 applies and implies that solutions found in this way cannot coincide. Solutions with a large number of peaks for small values of has been constructed in [EGP] and [DPKM] via the Lyapunov Schmidt reduction method.
Of course a result of this type deserves a deep study that we give to the interested reader.
Let us turn to the case of nodal solutions and consider now the Lane-Emden problem (6.1) in the unit ball . In [GI] the radial nodal least-energy solution is studied. In particular it is shown that the Morse index of changes in its existence range , corresponding to some symmetric spaces when and giving rise to some bifurcating branches of solutions which arise from the nodal radial solution . Along these branches solutions are symmetric with respect to a direction and are monotone in the angular variable in the sectors , by construction. Namely they present the same monotonicity properties that we proved under the -invariant Morse index bound.
It is also shown, using the -Morse index, that, for and , there exists an exponent such that least-energy nodal solutions in , that we denote by , are nonradial when , while it seems that they are radial when is near .
Moreover it is known that is nonradial for every , see [BWW] or [P], and it has also been noticed in [GI], by Morse index considerations, that is nonradial when is near and when is large.
These solutions are found minimizing the energy functional on the nodal -invariant Nehari manifold
[TABLE]
( () stands for the positive (negative) part of ) which has codimension by a result of [BWe], so that their -Morse index is exactly two, namely
[TABLE]
Then Theorem 1.2 applies when , and hence a -invariant nodal least energy solution is symmetric with respect to a direction and strictly monotone in the angular variable in the sectors , showing that when they are nonradial and . For , since coincides with then coincide with the least energy nodal solution and hence it is foliated Schwarz symmetric for every , by [BWW]. Observe that the foliated Schwarz symmetry in the plane is nothing else that our -invariance and -monotonicity property for .
Summarizing previous and new results we have:
Theorem 6.2**.**
The solution is nonradial for every . For there exists an exponent for which is non radial for any . When they are nonradial, the functions are symmetric with respect to a direction and strictly monotone in the angular variable in . Moreover for every and every , and for with so that problem (6.1) admits for at least distinct nodal solutions.
The in Theorem 6.2 solutions are given by the radial solution , the nodal least-energy solution (corresponding to ) which is the nodal least-energy solution in , the nodal least-energy solution and so on until the nodal least-energy solution . Finally, Morse index considerations in [GI] suggest that coincides with the radial nodal solution when .
As before we proved so far that the solutions found by bifurcation and the least energy nodal solutions in the symmetric spaces possess the same symmetry and monotonicity properties in the sectors supporting the conjecture that indeed they are the same.
Solutions with this type of symmetry have been construct by Lyapunov Schmidt reduction method in [EMP2].
Theorem 1.2 can be applied also considering the -Poisson problem
[TABLE]
where is a small parameter when is a ball or an annulus and the solutions change sign. In this case the known results, see [BPW], suggest that nonradial solutions can be found using our minimization procedure in the spaces . We leave the interested reader to carry out this study.
The previous results can be applied also to positive and nodal solutions of the Hénon problem
[TABLE]
where is a ball or an annulus, and can be used to distinguish solutions that belong to different spaces . In the paper [AG], as an example, it has been used, when is a ball, in order to obtain some multiplicity results, minimizing the energy functional associated with (6.5), namely
[TABLE]
on the -invariant Nehari manifold
[TABLE]
or on the -invariant nodal Nehari manifold
[TABLE]
Minimizing on , for any , , produces positive solutions that we denote by and satisfies
[TABLE]
while minimizing on , for any , , produces nodal solutions that we denote by and satisfies
[TABLE]
In [AG] it has been shown, by a careful study of radial solutions, that:
Theorem 6.3** (Theorem 4.2 in [AG]).**
Let be fixed. Then, there exists an exponent such that problem (6.5) admits at least distinct positive solutions for every .
Here denotes the ceiling function. One solution is radial while the others are not. Further
Theorem 6.4** (Theorem 4.4 in [AG]).**
Let be fixed. Then, there exists an exponent such that problem (6.5) admits at least distinct nodal least energy solutions for every .
Here . This number has been found out in [GGP] in the study of nodal radial solutions to (6.1) in the unit ball and indeed it is responsible of the existence of the nonradial nodal solutions for and . As seen in Theorem 6.4 it plays a role also in the case of nodal solutions to (6.5), where its effects are combined with the ones of the parameter . When , as said in Theorem 6.2.
Positive solutions with this type of symmetry have been construct by the finite dimensional reduction method in [EPW] for large values of .
Nodal solutions with this type of symmetry have been construct by the finite dimensional reduction method in [ZY] for large values of .
We believe that very similar results should hold also for positive solutions with exponential nonlinearities of the Hénon type
[TABLE]
and for positive and sign changing solution of the -Poisson problem of Hénon type
[TABLE]
where and are small parameters. Note that Theorem 1.1 can be applied in the first case, while Theorem 1.2 holds in the second example.
We quote the existence results in [GGNe], [D1], [D2]
We end observing that in the case of the unbounded domain , positive solutions to
[TABLE]
have been classified in the famous paper [PT] and they exhibit the same monotonicity properties that we have highlighted in our results.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[AP] A. Aftalion, F. Pacella , Qualitative properties of nodal solutions of semilinear elliptic equations in radially symmetric domains, C. R. Acad. Sci. 339 (2004) 339-344
- 2[AG] A.L. Amadori, F. Gladiali , On sign-changing solution to the Hénon problem in the disc, preprint.
- 3[BPW] T. Bartsch, A. Pisoia, T. Weth , N 𝑁 N -Vortex Equilibria for Ideal Fluids in Bounded Planar Domains and New Nodal Solutions of the sinh-Poisson and the Lane-Emden-Fowler Equations, Commun. Math. Phys. 297 (2010) 653-686
- 4[B We] T. Bartsch, T. Weth , A note on additional properties of sign changing solutions to superlinear elliptic equations, Topological Methods in Nonlinear Analysis 22 (2003) 1-14
- 5[BWW] T. Bartsch, T. Weth, M. Willem, Partial symmetry of least energy nodal solutions to some variational problems, J. Anal. Math. 96 (2005) 1-18
- 6[BN] H. Brezis, L. Nirenberg , Positive solutions of nonlinear elliptic equations involving critical Sobolev exponents. Comm. Pure Appl. Math., 36 (1983) 437-477
- 7[CL] W. Chen, C. Li , Classification of solutions of some nonlinear elliptic equations, Duke Math. J. 63 (1991) 615-622
- 8[C] C. V. Coffman A nonlinear boundary value problem with many positive solutions. J. Differential Equations, 54 (1984) 429-437