Phase Analysis of MIMO LTI Systems
Wei Chen, Dan Wang, Sei Zhen Khong, Li Qiu

TL;DR
This paper develops a new phase response concept for MIMO LTI systems with cramped frequency responses, extending existing theories and establishing a small phase theorem for feedback stability.
Contribution
It introduces a generalized phase definition for MIMO systems, defines half-cramped systems with time-domain interpretation, and proves a small phase theorem for stability analysis.
Findings
Introduces a phase response definition for MIMO LTI systems.
Establishes a small phase theorem for feedback stability.
Derives a sectored real lemma for phase-bounded systems.
Abstract
In this paper, we introduce a definition of phase response for a class of multi-input multi-output (MIMO) linear time-invariant (LTI) systems, the frequency responses of which are cramped at all frequencies. This phase concept generalizes the notions of positive realness and negative imaginariness. We also define the half-cramped systems and provide a time-domain interpretation. As a starting point in an endeavour to develop a comprehensive phase theory for MIMO systems, we establish a small phase theorem for feedback stability, which complements the well-known small gain theorem. In addition, we derive a sectored real lemma for phase-bounded systems as a natural counterpart of the bounded real lemma.
Click any figure to enlarge with its caption.
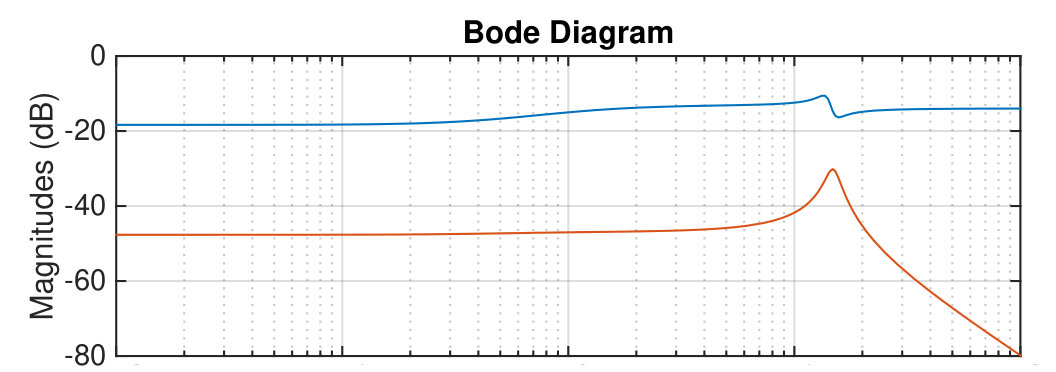 Figure 1
Figure 1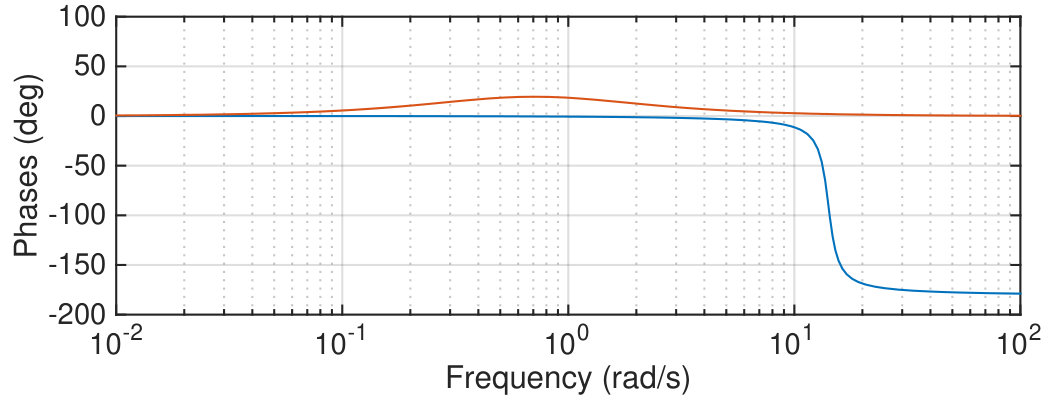 Figure 2
Figure 2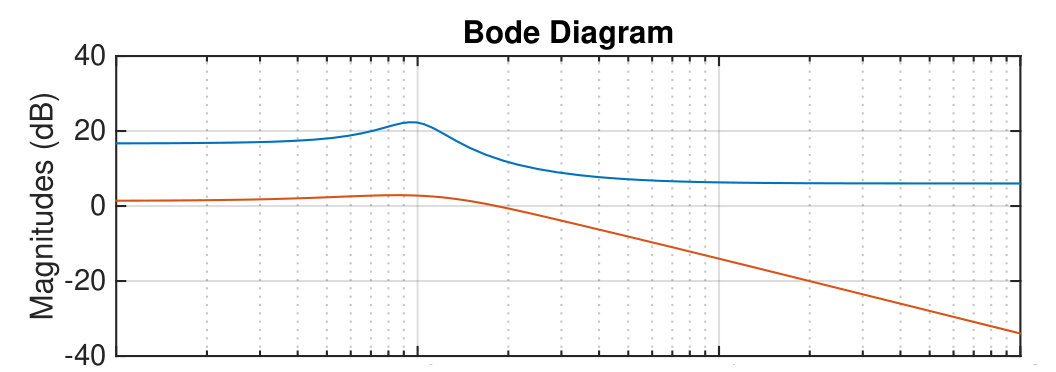 Figure 3
Figure 3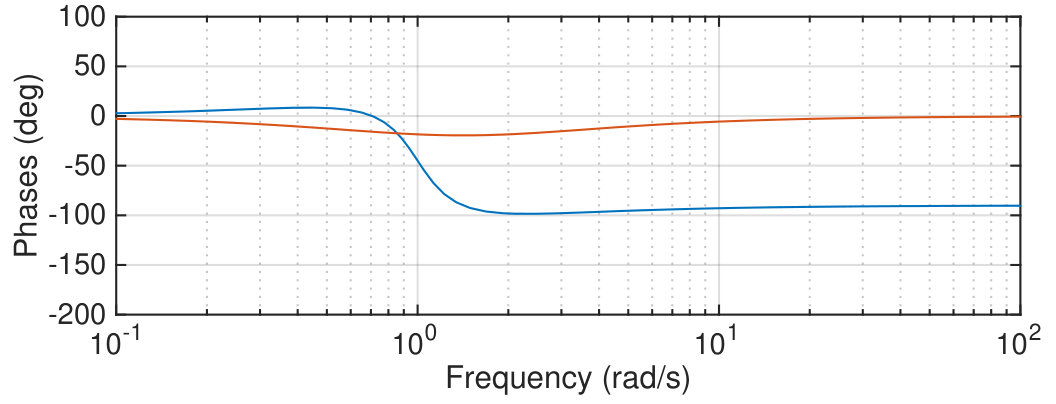 Figure 4
Figure 4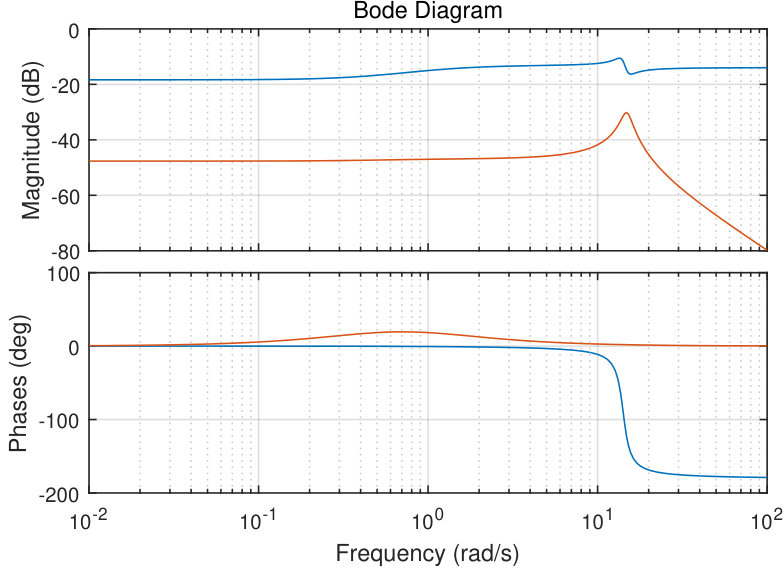 Figure 5
Figure 5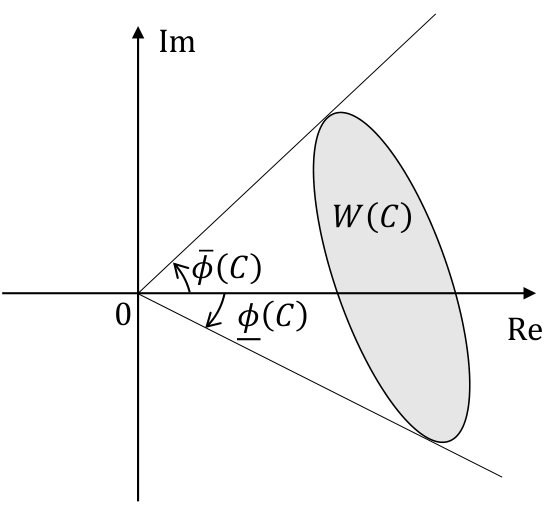 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsStability and Control of Uncertain Systems · Control and Stability of Dynamical Systems · Stability and Controllability of Differential Equations
Phase Analysis of MIMO LTI Systems ††thanks: This work was supported
in parts by the Research Grants Council of Hong Kong Special Administrative Region, China, under the Theme-Based Research Scheme T23-701/14-N.
Wei Chen, Dan Wang, Sei Zhen Khong, and Li Qiu W. Chen, D. Wang, and L. Qiu are with the Department of Electronic and Computer Engineering, The Hong Kong University of Science and Technology, Clear Water Bay, Kowloon, Hong Kong, China. Email: [email protected], [email protected], [email protected]. Z. Khong is with the Department of Electrical and Electronic Engineering, The University of Hong Kong, Pokfulam, Hong Kong, China. Email: [email protected]
Abstract
In this paper, we introduce a definition of phase response for a class of multi-input multi-output (MIMO) linear time-invariant (LTI) systems, the frequency responses of which are cramped at all frequencies. This phase concept generalizes the notions of positive realness and negative imaginariness. We also define the half-cramped systems and provide a time-domain interpretation. As a starting point in an endeavour to develop a comprehensive phase theory for MIMO systems, we establish a small phase theorem for feedback stability, which complements the well-known small gain theorem. In addition, we derive a sectored real lemma for phase-bounded systems as a natural counterpart of the bounded real lemma.
Index Terms:
MIMO systems, phase response, small phase theorem, sectored real lemma, half-cramped systems
I Introduction
In the classical frequency domain analysis of single-input-single-output (SISO) systems, the magnitude (gain) response and phase response go hand in hand. In particular, the Bode magnitude plot and phase plot are always drawn shoulder to shoulder. The combined Bode plot of a loop transfer function provides a significant amount of useful information about the closed-loop stability and performance. The gain and phase crossover frequencies of a loop transfer function give salient information on the gain and phase margins of the feedback system. The famous Bode gain-phase integral relation binds the gain and phase together. In frequency domain controller synthesis, phase also plays an important role. Loop-shaping design techniques, such as lead and lag compensation, are rooted in the phase stabilization ideas.
The inception of MIMO systems theory sees extension and thriving of the magnitude concept, but not equal flourishing in the phase concept. While the small gain theorem is widely known in the field of robust control, much less attention has been paid to the development of a small phase theorem. Moreover, the magnitude plot of a MIMO frequency response has been inbuilt to the computing environment MATLAB, a useful phase plot has not been available in practice. Several notable preliminary works on MIMO systems phases include [6, 8, 2] and [22]. The references [6, 8, 2] extended the Bode gain-phase integral relation for SISO systems to MIMO systems. The reference [22] proposed a definition of phases for MIMO systems, based on which a small phase theorem was formulated. However, the condition therein depends on both phase and gain information, which somewhat deviates from the initial purpose of finding a phase counterpart to the small gain theorem.
An important line of research with a phasic point of view is on positive real (passive) and negative imaginary systems. Roughly speaking, one can think of positive real systems as those whose phases lie within and negative imaginary systems as those whose phases over positive frequencies lie within . Research on positive real systems can be traced back to more than half a century ago and has led to a rich theory through efforts of generations of researchers. See books [1, 4, 5, 7] and the survey paper [16] for a review. Over the past two decades, negative imaginary systems [17, 21] and counter-clockwise dynamics [3] have attracted much attention. The abundant studies on these systems, concerning feedback stability, performance and beyond, provide valuable insights in developing a general phase theory for MIMO LTI systems.
One main reason accounting for the underdevelopment of MIMO phases is the following. While the gains of a complex matrix are well described by its singular values, a universally accepted definition of matrix phases has been lacking over a long period. Very recently, we initiated to adopt the canonical angles introduced in [9] as the phases of a cramped complex matrix whose numerical range does not contain the origin [25]. We studied various properties of matrix phases, some of which are briefly reviewed later. This paves the ground for conducting a systematic study of phase analysis and design for MIMO LTI systems.
In this paper, we first define the phase responses of MIMO LTI systems whose frequency responses are cramped at all frequencies. Such phase concept agrees with and generalizes the notions of positive realness and negative imaginariness. We then develop a small phase theorem for negative feedback interconnections of phase bounded systems, complementing the well known small gain theorem. We derive a sectored real lemma, which gives state space conditions for phase-bounded systems in terms of linear matrix inequalities (LMIs). This serves as a counterpart of bounded real lemma. In addition, we pay special attention to the class of half-cramped systems which exhibit a nice time-domain interpretation. We absorb much nutrition from the existing studies on positive real systems, negative imaginary systems, KYP lemma, generealized KYP lemma, integral quadratic constraints (IQCs), etc. along the way.
The rest of the paper is organized as follows. A review of matrix phases is presented in Section II. The phase responses of MIMO LTI systems are defined in Section III, followed by the discussions on half-cramped systems in Section IV. A small phase theorem is presented in Section V. State-space conditions are derived for phase bounded systems in Section VI. The paper is concluded in Section VII. The notation used in this paper is more or less standard and will be made clear as we proceed.
II Phases of a Complex Matrix
A nonzero complex scalar can be represented in the polar form as with and taking values in a half open -interval, typically or . Here is called the modulus or the magnitude and is called the argument or the phase. The polar form is particularly useful when multiplying two complex numbers. We simply have and \angle(ab)=\angle a+\angle b\mbox{ mod 2\pi}.
It is well understood that an complex matrix has magnitudes, served by the singular values
[TABLE]
with [11]. The magnitudes of a matrix possess plentiful nice properties, among which the following majorization inequality regarding the magnitudes of matrix products are of particular interest to the control community.
Given , we denote by and the rearranged versions of and so that their elements are sorted in a non-increasing order. Then, is said to be majorized by [19], denoted by , if
[TABLE]
When and are nonnegative, is said to be log-majorized by , denoted by , if
[TABLE]
The magnitudes of matrix product satisfy [19]
[TABLE]
where denotes the Hadamard product, i.e., the elementwise product.
In contrast to the magnitudes of a complex matrix , how to define the phases of appears to be an unsettled issue. An early attempt [22] defined the phases of as the phases of the eigenvalues of the unitary part of its polar decomposition. This definition was motivated by the seeming generalization of the polar form of a scalar to the polar decomposition of a matrix. However, phases defined this way do not have certain desired properties.
Very recently, we discovered a more suitable definition of matrix phases based on numerical range [25]. The numerical range, also called field of values, of a matrix is defined as , which, as a subset of , is compact and convex, and contains the spectrum of [12].
If , then is contained in an open half complex plane due to its convexity. In this case, is said to be a cramped matrix. It is known that a cramped is congruent to a diagonal unitary matrix that is unique up to a permutation [13, 27], i.e., there exists a nonsingular matrix and a diagonal unitary matrix such that . This factorization is called sectoral decomposition in [27]. Let be the field angle of , i.e., the angle subtended by the two supporting rays of at the origin. We define the phases of , denoted by , to be the phases of the eigenvalues of , taking values in an interval , where . The phases defined in this fashion coincide with the canonical angles of introduced in [9]. Assume without loss of generality that
[TABLE]
Moreover, define .
The phases defined above admit the maximin and minimax expressions [13]:
[TABLE]
In particular,
[TABLE]
A graphic interpretation of the phases is illustrated in Fig. 1. The two angles from the positive real axis to each of the two supporting rays of are and respectively. The other phases of lie in between.
It is noteworthy that the notion of matrix phases subsumes the well-studied strictly accretive matrices [15], i.e., matrices with positive definite Hermitian part. In particular, the phases of lie in if and only if is strictly accretive.
Given matrix , we can check whether it is cramped or not by plotting its numerical range. From the plot of numerical range, we can also determine a -interval in which the phases take values. How to efficiently compute is an important issue. The following observation provides some insights along this direction. Suppose is cramped. Then it admits a sectoral decomposition and thus
[TABLE]
indicating that is similar to a diagonal unitary matrix. Hence, we can first compute , taking values in , and then let . This gives one possible way to compute . We are currently exploring other methods, hopefully of lower complexity, for the computation of matrix phases.
The matrix phases defined above have plentiful properties, of which a comprehensive study has been conducted in [25]. First, note that the set of phase bounded matrices defined as
[TABLE]
where , is a cone. In addition, the following lemma can be shown by exploiting the maximin and minimax expressions of phases.
Lemma 1** ([25])**
If , then is a convex cone.
Another important property pertinent to later developments in this paper is concerned with product of cramped matrices. In view of the magnitude counterpart in (1), one may expect to hold for cramped matrices and . This, unfortunately, fails even for positive definite and . Notwithstanding, if we consider instead , i.e., the vector of eigenvalues of , the following weaker but useful result has been derived.
Lemma 2** ([25])**
Let be cramped matrices with phases in and , respectively, where and . Let take values in . Then
[TABLE]
The above majorization relation underlies the development of a small phase theorem, much in the spirit of (1) being the foundation of the celebrated small gain theorem. To be more specific, recall that the singularity of matrix plays an important role in the stability analysis of feedback systems. It is straightforward to see that if and are both sufficiently small, then is nonsingular. By contrast, one can observe that if and are both sufficiently small in magnitudes, then is nonsingular.
III Phase Response of MIMO LTI Systems
Let be an real rational proper stable transfer matrix, i.e., . Then , the vector of singular values of , is an -valued function of the frequency, which we call the magnitude response of . The norm of , denoted by , is of particular importance.
Suppose is cramped for all . Such a system is called a frequency-wise cramped system. Also, assume for simplicity that does not intersect the negative real axis for all . Then , the vector of phases of with each element taking values in , is well defined as an -valued function of the frequency, which we call the phase response of . We define the phase of , as the counterpart to its norm, to be
[TABLE]
Clearly, . It is noteworthy that the set of phase bounded systems
[TABLE]
where , is a cone.
Having defined the phase response of , we can now plot and together to complete the MIMO Bode plot of , laying the foundation of a complete MIMO frequency-domain analysis.
Example 1
The Bode plot of system
[TABLE]
is shown in Fig. 2.
Note that the well-known notions of positive real systems [1, 5, 16] and negative imaginary systems [17, 21] can be characterized using their phase responses. For simplicity, here we briefly mention the strong and strict versions of these notions. A transfer function matrix is said to be strongly positive real if for all [18]. In the language of phase, is strongly positive real if and only if
[TABLE]
On the other hand, a transfer function matrix is said to be strictly negative imaginary if for all [17]. This is equivalent to
[TABLE]
for all . The phase concept of MIMO LTI systems gives a way to unify these concepts, together with of course the trivial SISO systems phase, and more. The system shown in Fig. 2 is neither positive real nor negative imaginary but it has well-defined phase response.
IV Half-cramped Systems
Let . Then, is conjugate symmetric, i.e.,
[TABLE]
and hence and are symmetric about the real axis. This property hints that in dealing with many problems such as feedback stability, one only has to examine the frequency response for nonnegative frequency, while the other half frequency range will be automatically taken care of due to the symmetry. Following this hint, we define half-cramped systems, and provide a time-domain interpretation for such systems.
A system is said to be half-cramped if
[TABLE]
is contained in an open half plane and does not intersect the negative real axis, where cl. denotes closure and Co denotes convex hull.
Whether a system is half-cramped or not can be read out from its phase plot. For instance, the system in Example 1 is not half-cramped as its positive frequency phase response has a spread larger than . Below we give an example of a half-cramped system.
Example 2
Consider the system
[TABLE]
Its Bode plot is shown in Fig. 3, from which one can easily see that the system is half-cramped, but is neither positive real nor negative imaginary.
Interestingly, there is a nice time-domain interpretation for half-cramped systems. For preparation, we briefly introduce some background knowledge on signal spaces and Hilbert transform. The Hilbert transform has been used extensively in signal processing, especially in the time-frequency domain analysis. It has also been applied in the control field, mostly in gain-phase relationship and system identification, etc. We refer interested readers to [10] for more details.
Let be the usual Fourier transform on , the Hilbert space of complex-valued bilateral time functions
[TABLE]
Note that is an isometry onto , the Hilbert space of complex-valued bilateral frequency functions. If we decompose into a positive frequency signal space and a negative frequency signal space as
[TABLE]
then clearly this is an orthogonal decomposition. Let be the orthogonal projection onto . Then we naturally have the orthogonal decomposition
[TABLE]
Let us call the first space above and hence the second space . Let be the orthogonal projection onto . Then the commutative diagram in Fig. 4 gives a complete picture of the relationships among these spaces. Recall the Hilbert transform defined as
[TABLE]
It then turns out that and , the analytic part and the skew-analytic part of respectively.
Now let be the linear operator corresponding to . Clearly, both and are invariant subspaces of . We define the positive frequency numerical range and negative frequency numerical range as
[TABLE]
respectively. It can be easily seen that and are symmetric with respect to the real axis. Also, note that
[TABLE]
which suggests that
[TABLE]
In fact, one can further show
[TABLE]
and thus . The detailed proof is omitted for brevity and will be available in a longer version of this paper.
V Small Phase Theorem
Suppose and are real rational proper transfer function matrices. The feedback interconnection of and , as depicted in Fig. 5, is said to be stable if the Gang of Four matrix
[TABLE]
is stable, i.e., .
The celebrated small gain theorem [28, 18] is one of the most used results in robust control theory over the past half a century. A version of it states that for , the feedback system is stable if
[TABLE]
for all .
There was an attempt to formulate a small phase theorem by using phases defined from the matrix polar decomposition [22]. However, the condition therein involves both phase and gain information and thus deviates from the initial purpose of having a phase counterpart of the small gain theorem.
Armed with the new definition of matrix phases , we work out a version of the small phase theorem.
Theorem 1** (Small phase theorem)**
For frequency-wise cramped , the feedback system is stable if
[TABLE]
for all .
Proof:
Since , it follows that is stable if and only if . Hence, it suffices to show that for all , where denotes the closed right half plane.
To this end, observe that when (4) is satisfied, by symmetry, the inequality also holds for all . Applying Lemma 2, we have
[TABLE]
and thus for all . Now, let be an arbitrary number in . From Lemma 1, it follows that
[TABLE]
for all . Then, following the same arguments as above, we can show
[TABLE]
which in turn yields that
[TABLE]
for all . Since when ,
[TABLE]
for all , it follows by continuity that the same holds for all . Particularly, when , there holds for all . Finally, note that due to the well-posedness of the feedback system. This completes the proof.
We wish to mention that the small phase theorem can also be established via IQCs. Specifically, when the condition (4) is satisfied, one can find a dynamic multiplier of the form
[TABLE]
so that is continuous on the imaginary axis and the following quadratic constraints
[TABLE]
are satisfied for all . The feedback stability then follows from the result in [20]. From this perspective, the small phase theorem provides a nice phasic interpretation of the condition obtained from IQCs.
The small phase theorem generalizes a stronger version of the passivity theorem [7, 18], which states that for , the feedback system is stable if and are strongly positive real.
Note that the small gain theorem provides a quantifiable tradeoff between the gains of and , while the above small phase theorem does the same with respect to the phases of and . In the literature, the notions of input feedforward passivity index and output feedback passivity index [24, 26, 4, 16] have been used to characterize the tradeoff between the surplus and deficit of passivity in open-loop systems. It is our belief that the concept of MIMO system phases is more suited to this task. Specifically, gives a natural measure of passivity of system , which we call the angular passivity index. The small phase theorem above implies that if the sum of the angular passivity indexes of and are positive, then is stable. In addition, one can see that yields a natural phase stability margin of .
It is well known that the condition given in the small gain theorem is necessary in the following sense [28]. Suppose and let , where . Then, the feedback system is stable for all if and only if .
Regarding the necessity of small phase theorem, we observe evidences supporting the following conjecture. Recall the set of phase bounded systems defined in (3), where .
Conjecture 1** (Small phase theorem with necessity)**
Suppose . Then, the feedback system is stable for all if and only if .
Evidently, this conjecture holds in the SISO case in light of the Nyquist stability criterion. A rigorous proof in the MIMO case appears technically challenging and is under our current investigation.
VI State-space Conditions for Phase Bounded Systems
The norm of an LTI system can be determined by the well-known bounded real lemma. The efficient computation of norm is specifically useful as evidenced in small gain theorem and facilitates robust control design.
The bounded real lemma [28] states that for with a minimal realization \left[\begin{array}[]{c|c}A&B\\ \hline\cr C&D\end{array}\right], if and only if there exists satisfying the LMI
[TABLE]
One would naturally wish to see an analogous state-space condition for phase bounded systems. It is equally important to have an LMI characterization for a system satisfying , where . Along this direction, we obtain a sectored real lemma, a natural counterpart of the bounded real lemma. Before proceeding, we introduce some preliminary knowledge on KYP lemma and generalized KYP lemma.
VI-A KYP lemma and generalized KYP lemma
The well known KYP lemma builds the equivalence between infinite many frequency domain inequalities over the entire frequency range and a finite dimensional LMI.
Lemma 3** (KYP lemma [18])**
Let , , . Assume that has no eigenvalues on the imaginary axis. Then the inequality
[TABLE]
holds for all if and only if there exists a Hermitian matrix satisfying the LMI
[TABLE]
In contrast to the KYP lemma which copes with frequency domain inequalities over the entire frequency, the generalized KYP lemma [14] has the capability to address the frequency domain inequalities over partial frequency ranges.
Specifically, the generalized KYP lemma builds the equivalence between inequalities on curves in the complex plane and LMIs. Consider the curves characterized by the set
[TABLE]
where are given Hermitian matrices. By appropriately choosing and , can represent the partial or whole segment(s) of a straight line or a circle in the complex plane. When is unbounded, it is extended with .
Denote by the Kronecker product of matrices. A version of the generalized KYP lemma is as follows.
Lemma 4** (Generalized KYP lemma[14])**
Let **, , , and be curves in the complex plane. Let be the set of eigenvalues of in . Then the inequality
[TABLE]
holds for all if and only if there exist two Hermitian matrices and such that
[TABLE]
By choosing and appropriately, one can use to define a variety of frequency ranges. For instance, when , is simply the imaginary axis, and the generalized KYP lemma reduces to the classical KYP lemma.
VI-B Sectored real lemma
The following theorem gives a state space characterization for frequency-wise cramped systems satisfying , where .
Theorem 2** (Sectored real lemma)**
Let with a minimal realization \left[\begin{array}[]{c|c}A&B\\ \hline\cr C&D\end{array}\right] and . Then if and only if there exists satisfying the LMI
[TABLE]
Proof:
Note that , is equivalent to requiring to be strongly positive real, i.e.,
[TABLE]
for all . The inequality (7) can be rewritten as
[TABLE]
where . Then, it follows from KYP lemma that if and only if the LMI (6) has a Hermitian solution . Finally, the positive definiteness of follows from the stability of and .
When , the above sectored real lemma reduces to the strongly positive real lemma [23].
The case when appears much more complicated. Nevertheless, for half-cramped systems, we are able to derive an LMI condition by employing the generalized KYP lemma.
In dealing with half-cramped real systems, one only needs to concern the frequency domain characterization for positive frequency, i.e., . This frequency range can be captured by with .
Now we present the state-space condition for half-cramped systems.
Theorem 3
Let with a minimal realization \left[\begin{array}[]{c|c}A&B\\ \hline\cr C&D\end{array}\right] and . Then is half-cramped and if and only if there exist Hermitian matrices and satisfying either
[TABLE]
where , or
[TABLE]
where .
Proof:
By definition, we know is half-cramped and for if and only if either
[TABLE]
or
[TABLE]
holds for all . For brevity, we consider the case when (9) holds for all . The other case can be shown similarly. The inequality (9) can be rewritten into
[TABLE]
Then, applying the generalized KYP lemma with and yields that the above frequency domain inequalities hold if and only if there exist Hermitian matrices and satisfying LMIs (8). This completes the proof.
VII Conclusion
In this paper, we define the phase responses of frequency-wise cramped MIMO LTI systems. The combined magnitude and phase plots constitute a complete MIMO Bode plot. We obtain a small phase theorem for closed-loop stability, a counterpart of the well-known small gain theorem. We also derive a sectored real lemma for phase-bounded systems, a counterpart of the bounded real lemma.
This paper focuses on the analysis of MIMO systems. We are currently working on the synthesis part, aiming at solving an -phase optimal control problem, a counterpart of the classical -norm optimal control problem. How to apply and extend phase analysis to large scale dynamical networks is also an interesting future work.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] B. D. Anderson and S. Vongpanitlerd, Network Analysis and Synthesis , Englewood Cliffs, NJ, USA: Prentice-Hall, Inc., 1973.
- 2[2] B. D. O. Anderson and M. Green, “Hilbert transform and gain/phase error bounds for rational functions,” IEEE Transactions on Circuits and Systems , vol. 35, no. 5, pp. 528-535, 1988.
- 3[3] D. Angeli, “Systems with counterclockwise input-output dynamics,” IEEE Transactions on Automatic Control , vol. 51, no. 7, pp. 1130-1143, 2006.
- 4[4] J. Bao and P. L. Lee, Process Control: The Passive Systems Approach , Springer, 2007.
- 5[5] B. Brogliato, R. Lozano, B. Maschke, and O. Egeland, Dissipative Systems Analysis and Control: Theory and Applications , 2nd ed., Springer, 2007.
- 6[6] J. Chen, “Multivariable gain-phase and sensitivity integral relations and design tradeoffs,” IEEE Transactions on Automatic Control , vol. 43, no. 3, pp. 373-385, 1998.
- 7[7] C. A. Desoer and M. Vidyasagar, Feedback Systems: Input-Output Properties , New York: Academic, 1975.
- 8[8] J. S. Freudenberg and D. P. Looze, Frequency Domain Properties of Scalar and Multivariable Feedback Systems , Lecture Notes in Control and Information Sciences, vol. 104, Berlin, Germany: Springer-Verlag, 1988.