Safe Learning-Based Control of Stochastic Jump Linear Systems: a Distributionally Robust Approach
Mathijs Schuurmans, Pantelis Sopasakis, Panagiotis Patrinos

TL;DR
This paper develops a distributionally robust control method for stochastic jump linear systems, providing stability guarantees with high probability based on finite samples, and demonstrates its effectiveness through numerical examples.
Contribution
It introduces a novel control design framework using confidence regions for unknown distributions, ensuring stability with fewer samples compared to traditional stochastic methods.
Findings
Controller stability improves with larger sample sizes.
The approach scales well with system and probability space size.
Numerical results show better sample efficiency than stochastic methods.
Abstract
We consider the problem of designing control laws for stochastic jump linear systems where the disturbances are drawn randomly from a finite sample space according to an unknown distribution, which is estimated from a finite sample of i.i.d. observations. We adopt a distributionally robust approach to compute a mean-square stabilizing feedback gain with a given probability. The larger the sample size, the less conservative the controller, yet our methodology gives stability guarantees with high probability, for any number of samples. Using tools from statistical learning theory, we estimate confidence regions for the unknown probability distributions (ambiguity sets) which have the shape of total variation balls centered around the empirical distribution. We use these confidence regions in the design of appropriate distributionally robust controllers and show that the associated…
Click any figure to enlarge with its caption.
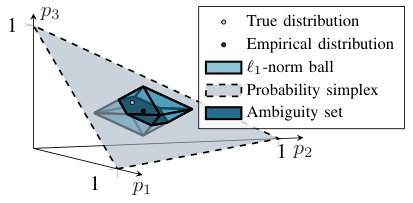 Figure 1
Figure 1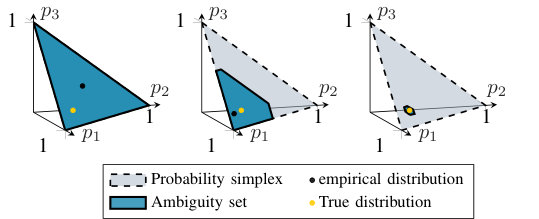 Figure 2
Figure 2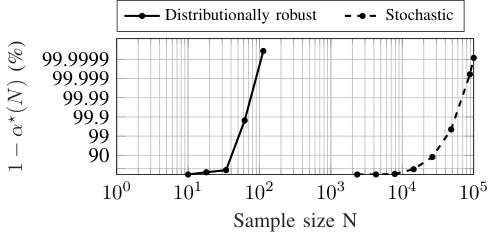 Figure 3
Figure 3 Figure 4
Figure 4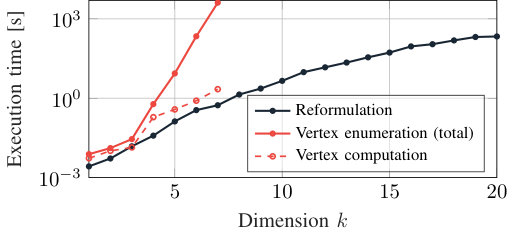 Figure 5
Figure 5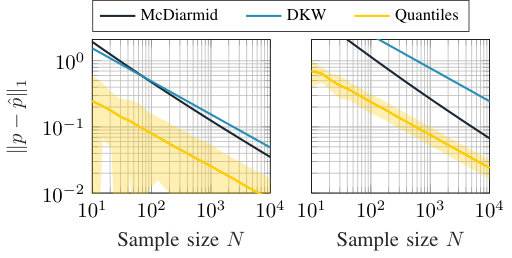 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.