Closed-Form Optimal Two-View Triangulation Based on Angular Errors
Seong Hun Lee, Javier Civera

TL;DR
This paper introduces the first closed-form, globally optimal solutions for two-view triangulation based on angular errors, applicable to various camera types and requiring less computation.
Contribution
It presents novel closed-form solutions for optimal two-view triangulation using angular errors, a first in the field, applicable to any central camera model.
Findings
Solutions guarantee global optimality under $L_1$ and $L_ Infinity$ norms.
Applicable to perspective, fisheye, and omnidirectional cameras.
Experimental validation confirms theoretical accuracy and efficiency.
Abstract
In this paper, we study closed-form optimal solutions to two-view triangulation with known internal calibration and pose. By formulating the triangulation problem as and minimization of angular reprojection errors, we derive the exact closed-form solutions that guarantee global optimality under respective cost functions. To the best of our knowledge, we are the first to present such solutions. Since the angular error is rotationally invariant, our solutions can be applied for any type of central cameras, be it perspective, fisheye or omnidirectional. Our methods also require significantly less computation than the existing optimal methods. Experimental results on synthetic and real datasets validate our theoretical derivations.
Click any figure to enlarge with its caption.
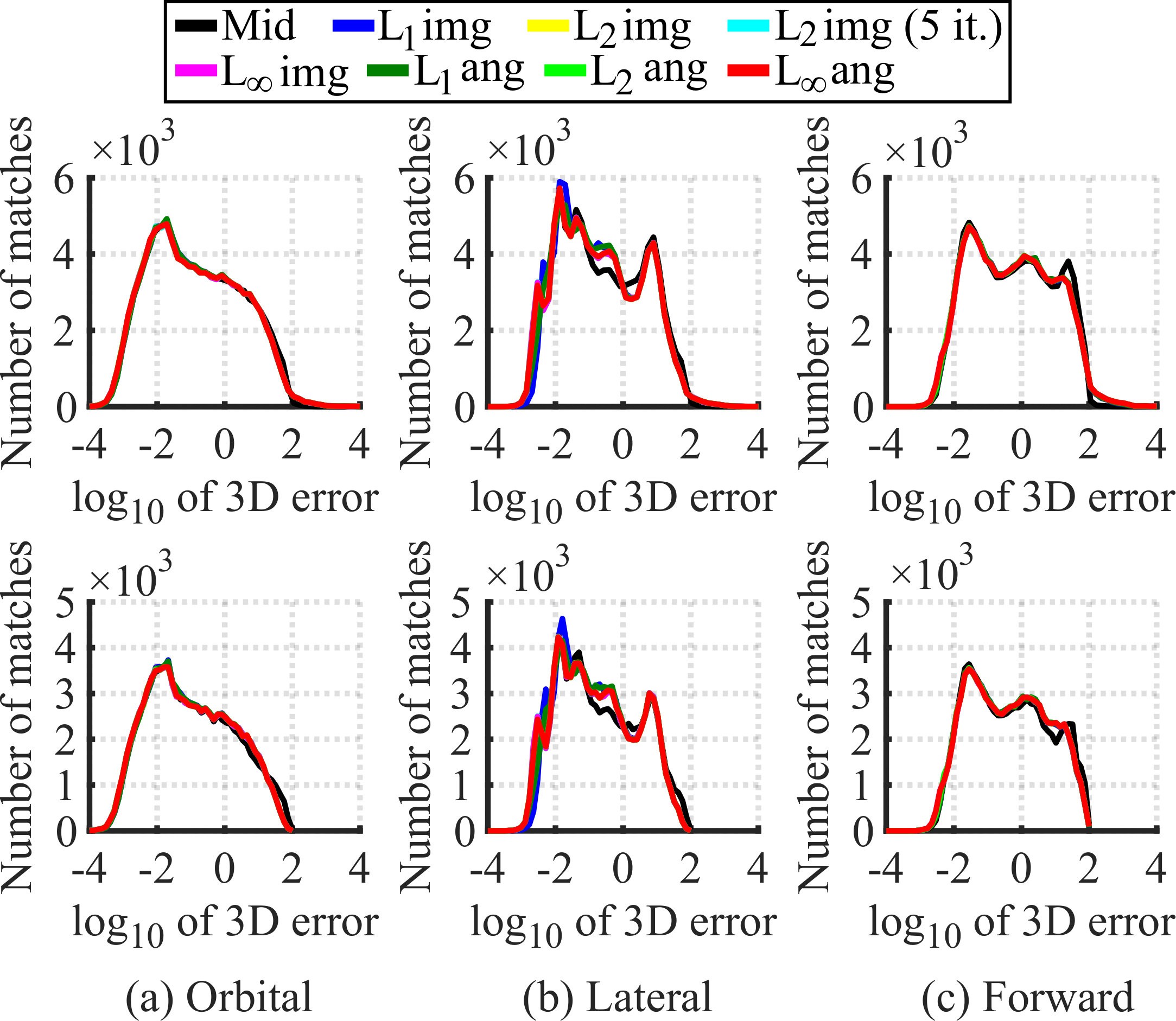 Figure 1
Figure 1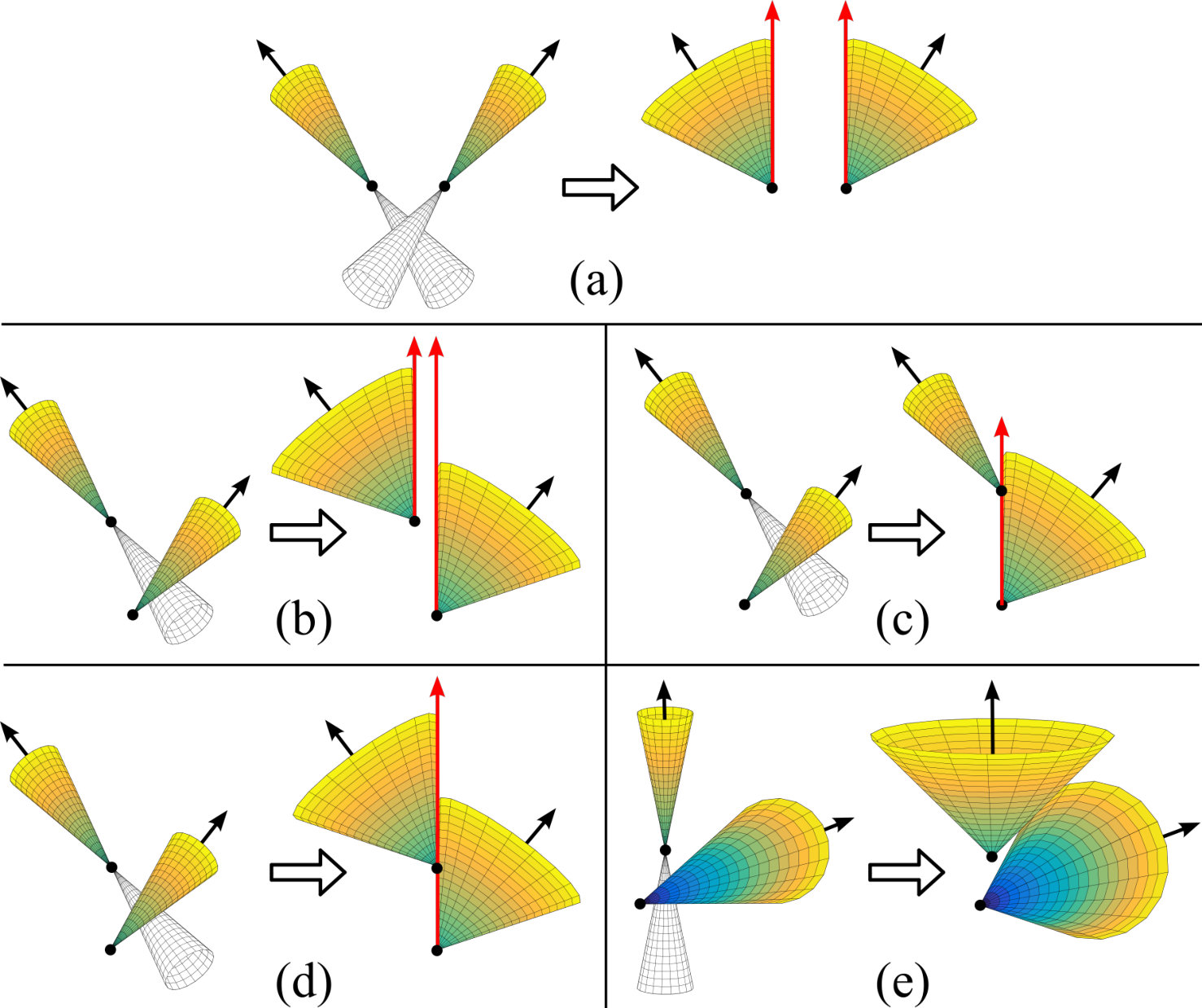 Figure 2
Figure 2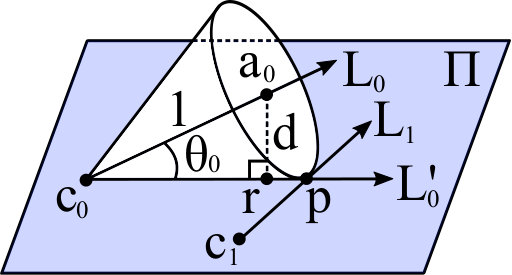 Figure 3
Figure 3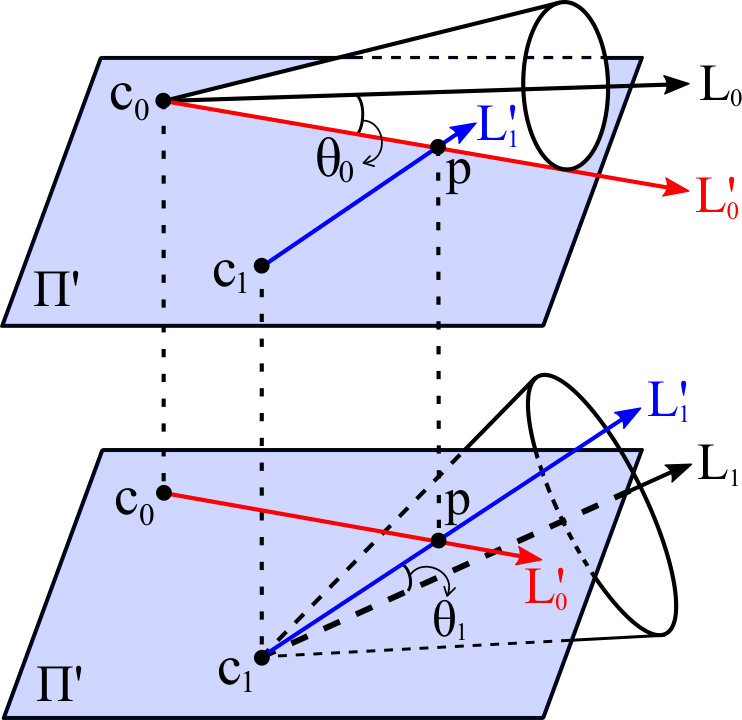 Figure 4
Figure 4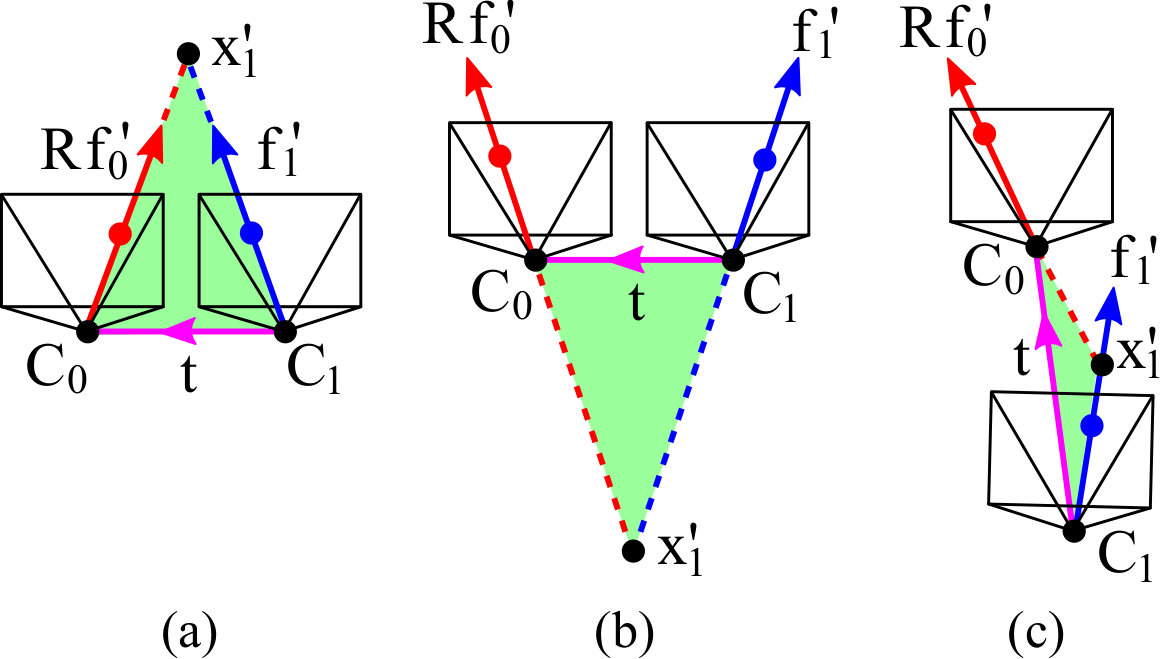 Figure 5
Figure 5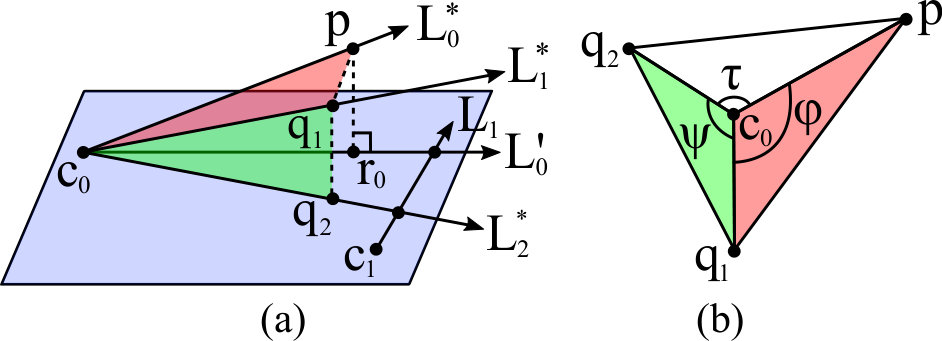 Figure 6
Figure 6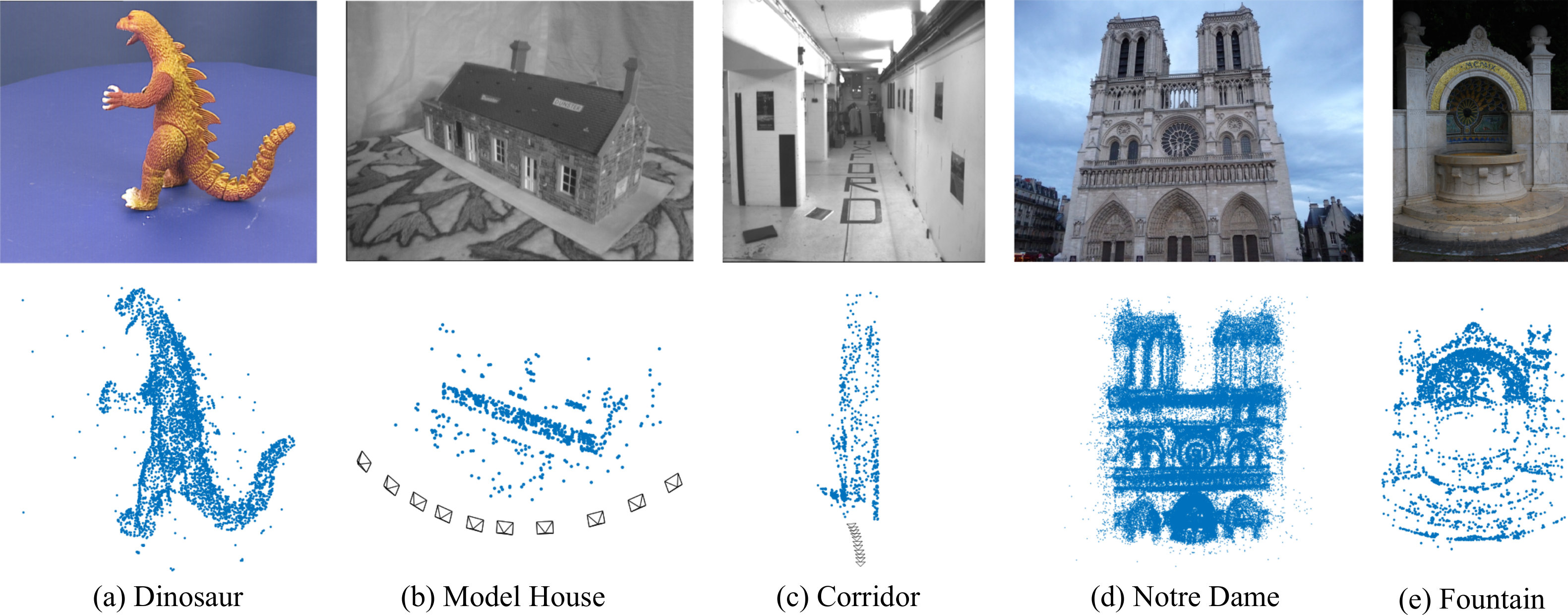 Figure 7
Figure 7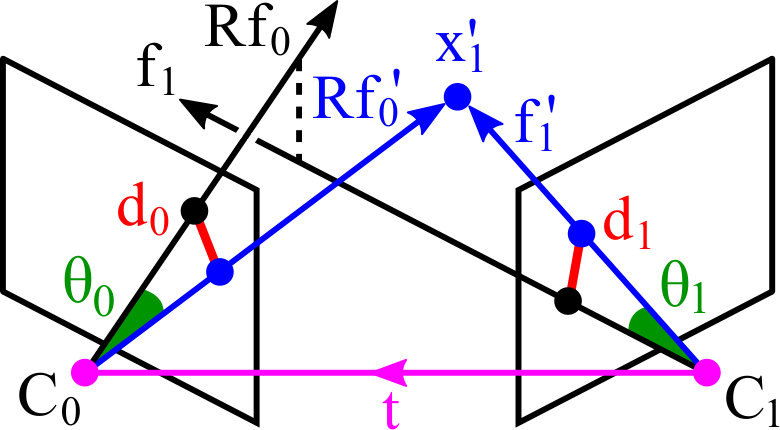 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.