This paper constructs a signed fundamental domain for the action of totally positive units in certain number fields, facilitating the study of Dedekind zeta functions even when true fundamental domains are unavailable.
Contribution
It introduces a method to build signed fundamental domains using k-rational simplicial cones for number fields with one complex place, applicable to any set of fundamental units.
Findings
01
Provides a signed fundamental domain for specific number fields.
02
Enables study of Dedekind zeta functions without true fundamental domains.
03
Constructs from any set of fundamental units.
Abstract
We give a signed fundamental domain for the action on C∗×R+n−2 of the totally positive units E(k)+ of a number field k of degree n and having exactly one pair of complex embeddings. This signed fundamental domain, built of k-rational simplicial cones, is as convenient as a true fundamental domain for the purpose of studying Dedekind zeta functions. However, while there is no general construction of a true fundamental domain, we construct a signed fundamental domain from any set of fundamental units of k.
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Full text
Signed Shintani cones for number fields with one complex place
Instituto de Matemáticas,
Facultad de Ciencias,
Universidad de Valparaíso,
Gran Bretaña 1091, 3er piso, Valparaíso,
Chile
Abstract.
We give a signed fundamental domain for the action on C∗×R+n−2 of the totally positive units E(k)+ of a number field k of degree n and having exactly one pair of complex embeddings. This signed fundamental domain, built of k-rational simplicial cones, is as convenient as a true fundamental domain
for the purpose of studying Dedekind zeta functions. However, while there is no general construction of a true fundamental domain, we construct a
signed fundamental domain from any set of fundamental units of k.
Key words and phrases:
Shintani cones, fundamental domain, units
2010 Mathematics Subject Classification:
Primary 11R27, 11R42, 11Y40
This work was partially supported by the Chilean FONDECYT grants 1085153 and 1110277
I would like to address special thanks to my advisor, Eduardo Friedman
Motivated by the study of special values of L-functions over totally real number fields, Shintani introduced in 1976 [Sh1] a geometric method that allowed him to write any partial zeta function of a totally real number field as a finite sum of certain Dirichlet series, which can be considered as a natural generalization of the Hurwitz zeta function.
Later [Sh2] Shintani extended these results to general number fields. In order to enunciate Shintani’s geometric method, fix a number field k with r
real embeddings and s pairs of complex embeddings (i. e. [k:Q]=2s+r), and let E(k) be its group of units. Given a complete set τi:k→C(1≤i≤s+r) of embeddings of k,
[TABLE]
we can consider k⊂Cs×Rr by identifying x∈k with
[TABLE]
where x(i):=τi(x). Put
[TABLE]
where R+r:=(0,∞)r. Then the group E(k)+ of totally positive units of k acts on (C∗)s×R+r by component-wise multiplication, where (C∗)s:=(C∖{0})s. On the other hand, if v1,v2,…,vd∈Cs×Rr (1≤d≤2s+r) is a set of
R-linearly independent vectors, we shall call
[TABLE]
the d-dimensional simplicial cone generated byv1,v2,…,vd.
Shintani proved [Sh2, Proposition 2] that there exists a finite set {Cj∣j∈J} of simplicial cones, all with generators in k+ (i. e. k-rational),
such that
[TABLE]
Equivalently, the finite disjoint union ⋃j∈JCj is a fundamental domain for the action of E(k)+ on
(C∗)s×R+r. Note that this result does not provide any description of the cones involved.
When k is a totally real number field, Colmez proved [Co1][Co2] the existence of special units η1,η2,…,ηr−1∈E(k)+ such that if we put
[TABLE]
for σ in the symmetric group Sr−1, then the finite disjoint union
[TABLE]
(together with some boundary faces of the Cσ) is a fundamental domain of R+r under the action of the group U generated by the ηi. Unfortunately, we do not know of any practical algorithm for finding these special units when r≥4.111See [DF2] for the cubic case r=3.
In 2012, Díaz y Díaz and Friedman [DF1] removed this obstruction by considering signed fundamental domains. More precisely, if η1,...,ηr−1 is any set of independent units in E(k)+, then the Colmez cones Cσ, together with some boundary faces, form a signed fundamental domain for the action on R+r of the group U generated by the ηi, i. e.
[TABLE]
where all sums are over finite sets of cardinality bounded independently of x, and wσ=±1 is a sign associated to the cone Cσ.222In fact, in [Co1], the special units ηi
are characterized by the condition wσ=+1 for all σ∈Sr−1. These signed fundamental domains are as convenient as
true fundamental domains for computing partial zeta functions, but they have the advantage of being explicitly constructed from any set of independent units η1,...,ηr−1∈E(k)+. To prove their result, Díaz y Díaz and Friedman used topological degree theory on the quotient manifold R+r/E(k)+. In the following points we give an overview of such proof, as it helps to understand the present work.
1.
Consider the multiplicative action of U on half-lines L⊂R+r∪{0} with initial point at the origin. Parameterize each L by yL∈R+r−1, where
[TABLE]
Then the group U:=⟨η1,…,ηr−1⟩ acts on R+r−1 by multiplication, where
[TABLE]
2.
For each σ∈Sr−1, let cσ⊂R+r−1 be the set of parameters of half-lines going through the Colmez cone Cσ (see (2)), *i. e. *, cσ is the intersection of Cσ with the hyperplane {x∈R+r∣x(r)=1}. If {(cσ,wσ)}σ∈Sr−1 is a signed fundamental domain for the action of U on R+r−1, then {(Cσ,wσ)}Sr−1 is a signed fundamental domain for the action of U on R+r.
3.
Let Ir−1:=[0,1]r−1 be the unit hypercube of r−1 dimensions, and consider the usual simplicial decomposition of Ir−1 into (r−1)! simplices,
[TABLE]
There exist two continuous functions f,f0:Ir−1→R+r−1 such that
(a)
f is a piecewise affine map that maps Dσ onto the closure of cσ for each σ∈Sr−1. The function f0 maps Ir−1 onto the closure of a fundamental domain for the action of U on R+r−1; this fundamental domain is easy to describe but it is not of the form we want.
2. (b)
f and f0 induce homotopic functions F,F0:T→T between two tori; T=Ir−1/∼, with y∼y+ei whenever y,y+ei∈Ir−1, where ei is the ith standard basis vector of Rr−1; and T=R+r−1/U. Moreover, F0 is a homeomorphism of (global) topological degree deg(F0)=deg(F)=±1.
4.
Equation (3), with Cσ, U and R+r replaced respectively by cσ, U and R+r−1,
follows from interpreting the left hand side as a sum of local degrees of F divided by deg(F) (local-global principle of topological degree theory). Hence {(cσ,wσ)}σ∈Sr−1 is a signed fundamental domain for the action of U on R+r−1, and the main result of [DF1] follows from point 2.
When k is not totally real, our knowledge of explicit fundamental domains is very limited. There are some examples in a paper [RS] of Sczech and Ren, who found explicit cones
to give numerical evidence of their refinement of Stark’s conjecture over complex cubic number fields. A more general approach can be found in
[Ok], where explicit cones are presented for the field given by the polynomial X3+kX−1. We know of no results for non totally real fields of degree four or more.
The aim of this work is extend the results of [DF1] to number fields k having exactly one complex place. In extending the topological approach of [DF1], we find two obstructions. The first one is that we have to choose some elements in k+ to generate [k:Q]-dimensional cones together with the given units, unlike the totally real case where the given units provide all the generators for the r-dimensional Colmez cones since the rank of the unit group is r−1. The other obstruction is that C∗×R+r is a non-convex set; this restricts our choice of generators for the cones, which are convex subsets, and also adds considerable technical difficulty to the use of topological degree theory, because there is no obvious way to construct homotopies having the properties we need in a non-convex set. After overcoming these obstructions, our proof will follow the same lines of [DF1] described in the above overview.
To get an idea of our construction, suppose that k is a complex cubic number field, and that ε=(ε(1),ε(2))∈C∗×R+ is a totally positive unit of k of infinite order. Put ε:=ε(1)/ε(2)∈C∗ and assume ∣ε∣>1; as in [DF1], in order to get a signed fundamental domain (built of simplicial cones) for the action of ⟨ε⟩ on C∗×R+, it is sufficient to find a signed fundamental domain (built of triangles) for the action of ⟨ε⟩ on C∗. For each ℓ=0,1,2, choose αℓ∈C∗ such that αℓ/∣αℓ∣=exp(2πiℓ/3), and let Δ be the triangle with vertices α0, α1, α2. We can order the vertices of Δ and εΔ by ordering their arguments in [0,2π) counterclockwise; of course this depends on ε. Suppose we get α0<εα2<α1<εα0<α2<εα1;
if we put
[TABLE]
then the triangle Δℓ with vertices Vℓ does not contain the origin for each ℓ=1,…,6, since its vertices lie in a convex subset of C∗. Looking at Δ1, we deduce that there is a unique d∈Z such that arg(ε), 2πd−2π/3, and arg(ε)+2π/3 lie in an interval of length less than π, where arg(z) represents the argument of z∈C∗ in the range [−π,π). Consider the following elements of R2:
[TABLE]
also put
[TABLE]
and let Δℓ′ be the triangle with vertices Vℓ′ for each ℓ=1,…,6. If D is the union of all the Δℓ′, then D is the closure of a fundamental domain for R2 under the translation action of its subgroup Z2, and the Δℓ′ form a simplicial decomposition of D. Thus we can define a piecewise affine map f:D→C∗ by
[TABLE]
Now, the set F={z∈C∗∣1≤∣z∣<∣ε∣} is an obvious fundamental domain for the action of ⟨ε⟩ on C∗, and the function f0:D→C∗ defined by
[TABLE]
has image the closure of F; here complex powers are defined by the principal branch of the logarithm. One verifies that f and f0 are homotopic through the homotopy
[TABLE]
this homotopy is well defined because f(Δℓ′) and f0(Δℓ′) are contained in a (same) convex subset of C∗ for each ℓ=1,…,6. Furthermore, f, f0, and gλ descend to continuous maps between the tori T=D/∼ and T=C∗/⟨ε⟩, where ∼ identifies points of D lying in the same orbit with respect to the translation action of Z2 on R2. This means that the maps between T and T induced by f and f0 are homotopic. From this point forward, our proof follows the same lines of [DF1]. Note that in this case α0, α1, and α2 are not necessarily elements coming from k+; this is a minor problem which will be solved by choosing elements of k+ not “too far” from the αℓ.
We are very grateful to the referees for helping us to improve the exposition of this article and for encouraging us to enhance this introduction with an overview of our construction.
2. The signed fundamental domain
From now on we assume r:=\mathrm{rank}\big{(}E(k)_{+}\big{)}=[k:\mathbb{Q}]-2>0. Fix a set of independent units ε1,…,εr∈E(k)+, and let V⊂E(k)+ be the subgroup they generate. Following Colmez [Co1], define
[TABLE]
For t=1 we mean f1,σ:=1=(1,1,…,1)∈C∗×R+r. Thus ft,σ∈E(k)+⊂C∗×R+r. Define
[TABLE]
where τ1 is a fixed complex embedding of k (see (1)). When t=r+1 in (5), we will write
[TABLE]
Note that for all 1≤t,t′,t′′≤r+1 and all σ∈Sr we have
[TABLE]
Let arg(z) be the argument in the interval [−π,π) of the nonzero complex number z. For a fixed integer N≥3, let m=mN:C∗→Z be the function defined by
[TABLE]
where the ceiling function ⌈⌉:R→Z satisfies x≤⌈x⌉<x+1. Then, for σ∈Sr and t,t′∈{1,…,r+1}, consider the next three conditions
[TABLE]
We shall say that t≺σt′ if and only if the pair (t,t′) satisfies condition (9), and at least one of the conditions (10) and (11). In Proposition 6 we will prove, for σ∈Sr, that the relation ≺σ is a strict total order on the set {1,…,r+1}. Also, in Lemma 4 we will prove that m(ξσ(t,t′)) is congruent modulo N to either m(ξσ(t′))−m(ξσ(t)) or m(ξσ(t′))−m(ξσ(t))+1.
Finally, let Sr be the product of sets
[TABLE]
with cardinality \big{(}[k:\mathbb{Q}]-1\big{)}!\cdot N.
2.1. The seven-step algorithm
With the above conventions and definitions, the following seven steps produce a signed fundamental domain of Díaz y Díaz–Friedman type (see (3)) for the action of the group V on C∗×R+r.
1.
Fix an integer N≥3, and consider the function m=mN defined in (8).
2.
For each σ∈Sr, order the set {1,…,r+1} using the strict total order ≺σ defined by conditions (9), (10) and (11).
3.
For each σ∈Sr, let ρσ∈Sr+1 be the unique permutation such that
[TABLE]
4.
For each t∈Z, choose and fix an element αt=α(t)∈k+ such that
[TABLE]
5.
Let μ=(σ,q,n)∈Sr. For t∈{1,…,r+1}, write
[TABLE]
and for t=r+2 write
[TABLE]
6.
For μ=(σ,q,n)∈Sr, define wμ=±1 or [math] as
[TABLE]
where sgn(σ) is the usual signature (i. e. ±1) of the permutation σ∈Sr,
[TABLE]
the fi,μ are regarded as elements of Rr+2 by the map
[TABLE]
and \,\mathrm{sign}\big{(}\!\det(v_{1},v_{2},\dots,v_{\ell})\big{)} is the sign of the determinant of the ℓ×ℓ real matrix whose columns are the vi.
7.
For each μ∈Sr with wμ=0, consider the real hyperplanes
[TABLE]
each of which separates C×Rr into two disjoint half-spaces, C×Rr=Hi,μ+∪Hi,μ∪Hi,μ−, where Hi,μ+ is the half-space containing fi,μ. Then define Cμ=Cμ(ε1,ε2,…,εr) by
[TABLE]
with er+2:=[0,0,…,0,1]∈C∗×R+r.
Some remarks. The choice N=3 in the first step of the algorithm generates the minimum number of cones, namely ([k:Q]−1)!⋅3. Also note that N, as well as the αt chosen in the fourth step, are not included in the posterior notation since they remain fixed along the whole algorithm. In step five, we clearly have ft,μ∈k+⊂C∗×R+r for all t∈{1,…,r+2}. In step six, note that the absolute value of the determinant in the denominator of (15) is half of the regulator of the independent units ε1,ε2,…,εr, and so is non-zero. Also, in the following when identify C×Rℓ=Rℓ+2 as an R-vector space, we will be referring to the isomorphism (16) with r=ℓ. Finally, the definitions given in the seventh step of the algorithm make sense since if wμ=0, then each closed cone Cμ:=∑t=1r+2R≥0⋅ft,μ has a non-empty interior; furthermore, in Lemma 25 we will prove that er+2 cannot lie in any of the Hi,μ.
We will call the above algorithm the seven-step algorithm (7SA). It produces our main result.
Theorem 1**.**
Let k be a number field with r>0 real embeddings, and exactly one pair of conjugate complex embeddings. Suppose that
the units ε1,…,εr generate a subgroup V of finite index in the group of totally positive units of k. Then the signed cones \big{\{}(C_{\mu},w_{\mu})\big{\}}_{w_{\mu}\not=0} defined in (15) and (7) give a signed fundamental domain for the
action of V on \mathbb{C}^{*}\times\mathbb{R}_{+}^{r}:=\big{(}\mathbb{C}\smallsetminus\{0\}\big{)}\times(0,\infty)^{r}. That is,
[TABLE]
where all sums are over finite sets of cardinality bounded independently of x.
2.2. Corollaries of Theorem 1
If wμ=−1 for all μ∈Sr, then each orbit V⋅x must
intersect only one of the Cμ’s, and only once at that. Hence
Corollary 2**.**
Suppose that wμ=−1 for all μ∈Sr, then ∪μ∈Srwμ=0Cμ is a true fundamental domain for the action of V on C∗×R+r.
The next corollary shows that a signed fundamental domain is as convenient as a true one for dealing with partial zeta functions associated to k.333Its proof coincides with that of [DF1, Corollary 6], so we omit it. Fix an integral ideal f of k, and put f∞ the formal product of f with all the infinite places of k. Let ζf(a,s):=∑b∈aNb−s (Re(s)>1) be the Dedekind partial zeta function attached to a ray class a modulo f∞ represented by the integral ideal a. Here b runs over all integral ideals in a, and N is the absolute norm.
Corollary 3**.**
Suppose ε1,…,εr generate the group E(k)+f of totally positive units of k that are congruent to 1 mod f, and suppose we have chosen
α0,…,αN−1∈a−1f in the fourth step of the 7SA. Then
[TABLE]
where ζf(Cμ,x,s) is the Shintani zeta function
[TABLE]
3. Examples
In this section we show three examples of signed fundamental domains obtained by using the 7SA. Our numerical results are up to an error less than 10−28.
3.1. Cubic case
Let k=Q(γ), where γ3+γ2−1=0. Then the discriminant of the complex cubic number field k is −23. Let
[TABLE]
In the next two examples, we give signed fundamental domains for the action of ⟨ε1⟩ on C∗×R+.
3.1.1. Example 1
If N=3, α0=1, α1=2γ2+2γ+1, and α2=2γ+1, one verifies that \arg\!\big{(}\alpha_{0}^{(1)}\big{)}=0,
[TABLE]
lie in the interval (−π/6,π/6)=(−0.5235...,0.5235...). Following steps 1, 2 and 3, we have
[TABLE]
where (1)∈S1 is the identity permutation; hence 2≺(1)1, and ρ(1) is the identity permutation of S2. Now, using (13) and (14) we compute
[TABLE]
Then we compute the wμ using (15), with Logε1=0.1405...;
[TABLE]
Finally, the following equations allow us to determine the Ri,μ defined in step 7.
[TABLE]
Therefore, the cones of the signed fundamental domain are
[TABLE]
Figure 1 represents the intersection of the plane {(z,1)∣z∈C}⊂C×R with the signed fundamental domain. The blue region indicates the cones with wμ positive, the red region indicates the cone with wμ negative, and the purple region represents the intersection of two cones with opposite signs.
3.1.2. Example 2
If N=3, α0=1, α1=γ2+γ, and α2=γ, then the 7SA gives
[TABLE]
w(1),1,1=+1, and wμ=0 for all μ∈Sr with \mu\not=\big{(}(1),1,1\big{)}. Therefore, in this case the 7SA gives a true fundamental domain for the action of ⟨γ⟩ on C∗×R+.
3.2. Quartic case
Let k=Q(γ), where γ4+γ−1=0. Then the discriminant of k is −283. Let
[TABLE]
be two independent totally positive units of k, with
[TABLE]
3.2.1. Example 3
If N=3, α0=1, α1=γ2−γ+1, and α2=γ2+γ, then the 7SA gives the signed fundamental domain for the action of ⟨ε1,ε2⟩ on C∗×R+2 with
[TABLE]
and w(1),2,0=w(1),3,1=w(12),1,0=w(12),3,1=+1. The rest of the wμ are 0. So, as in the previous example, this signed fundamental domain is actually a true one.
4. Construction of f
As in [DF1], we will prove Theorem 1 by interpreting the left-hand side of (19) as a sum of local degrees of a certain continuous map F:T→T between a standard (r+1)-torus T and an (r+1)-torus T. Using a basic result in algebraic topology, this sum of local degrees equals the global degree of F. We will compute this global degree by proving that F is homotopic to an explicit homeomorphism F0, whose degree can be easily computed. Our contribution lies in the construction of a piecewise affine map f, which we will use to define F.
4.1. The argument at the complex embedding
As we said in the Introduction, the non-convexity of C∗×R+r is an obstruction to deal with. To bypass this obstruction, we will divide C∗×R+r into certain convex regions using the argument at the complex place. For N∈N (with
N≥3 and fixed), we define the regions
[TABLE]
where
[TABLE]
Since N≥3 the St are convex, and their union for t∈Z is C∗. Also St=St′ if and only if t≡t′(modN).
Now we define the “windmill arms” At by
[TABLE]
where
[TABLE]
Since A0 and the interior A∘1 of A1 are contained in S0, we have
[TABLE]
Figure 2 shows the windmill arms At in the case N=3.
Before continuing the study of the regions described above, we need some elementary properties of the function m:C∗→Z defined in (8). In the following, all the congruences (≡) will be modulo N.
Lemma 4**.**
Let z,u,v,w∈C∗. Then the following hold.
(i)
m(zw)* is congruent to either m(z)+m(w) or m(z)+m(w)−1.*
2. (ii)
If m(z)+m(z−1)≡0, then m(zw)≡m(z)+m(w).
3. (iii)
\arg\!\Big{(}z\cdot\mathrm{exp}\big{(}2\pi i\mathrm{m}(z)/N\big{)}\Big{)}* lies in \big{[}0,\,2\pi/N\big{)}.*
4. (iv)
If m(u−1v)+m(v−1w)≡m(w)−m(u), then m(u−1w)≡m(w)−m(u).
5. (v)
We have m(v−1u)+m(vu−1)≡0 if the following four equations hold;
[TABLE]
Proof.
First note that for all x,y∈R and all ℓ′∈Z we have
[TABLE]
Thus (i) follows easily from (8), and from these two properties of the ceiling function.
To prove (ii), first note that m(zw) is congruent to either m(z)+m(w)−1 or m(z)+m(w) (by (i)). Suppose m(zw)≡m(z)+m(w)−1. Using (i), we have that m(w)=m(zwz−1) is congruent to either m(zw)−m(z) or m(zw)−m(z)−1 (since −m(z)≡m(z−1)), and so congruent to either m(w)−1 or m(w)−2, which is absurd since N≥3.
Let us prove (iii). Using the identity ⌈x+ℓ′⌉=⌈x⌉+ℓ′(x∈R,ℓ′∈Z), we have that \mathrm{m}\!\Big{(}z\cdot\mathrm{exp}\big{(}2\pi i\mathrm{m}(z)/N\big{)}\Big{)} is congruent to \left\lceil\frac{-N}{2\pi}\big{(}\arg(z)+2\pi\mathrm{m}(z)/N\big{)}\right\rceil, and so congruent to 0.
In general, if w′∈C∗ is such that m(w′)≡0, then we have that ⌈−Narg(w′)/2π−Nq⌉=0
for some q∈Z. But this is equivalent to 0≤arg(w′)+2πq<2π/N, so q=0. Therefore, we have proved (iii).
If m(u−1v)+m(v−1w)+m(u) is congruent to m(u−1w)+1+m(u), then it is congruent to either m(w)+2 or m(w)+1 by (i), but this is absurd since N≥3. Hence, m(u−1w)+m(u)≡m(w).
To prove (v), suppose m(v−1u)+m(vu−1)≡1. Using (ii) we have that
[TABLE]
but while the left-hand side of these congruences is congruent to m(w)−m(v), the right-hand side is congruent to m(w)−m(v)+1, which is absurd. Therefore, from (i) we have m(v−1u)+m(vu−1)≡0, since m(1)=0.
∎
Next we give necessary and sufficient conditions for some inclusion relations of the regions At and St. These conditions are based on modular arithmetic, and they allow us to relate At and St with the relation ≺σ defined by conditions (9), (10) and (11).
Lemma 5**.**
Let z∈C∗ and let t,k∈Z. Then the following hold.
(i)
z⋅At⊂Sk* if and only if m(z)≡t−k.*
2. (ii)
z⋅At=Ak* if and only if m(z)+m(z−1)≡0 and m(z)≡t−k.*
Proof.
To prove (i), first assume z⋅At⊂Sk. From (21) it is clear that z\cdot\mathcal{A}_{t}=\mathrm{exp}\big{(}i\arg(z)\big{)}\cdot\mathcal{A}_{t}. Thus, from
(20) we get
[TABLE]
for all w′∈A0. Putting w′=exp(−πi/2N) and then w′=exp(πi/2N), we see that there exist q,q′∈Z such that
[TABLE]
This implies that
[TABLE]
If t−k≡m(z), the above would imply that m(z)−t+k is congruent to both ±1, which is absurd since N≥3. Conversely, suppose t−k≡m(z). Let w′∈A0. Using Lemma 4 (iii) and arg(w′)∈[−π/2N,π/2N], we have for some t′∈Z
[TABLE]
so t′=0. Then, using (20), (22), and that t≡m(z)+k, we get that
[TABLE]
is contained in exp(2πik/N)⋅S0=Sk. This concludes the proof of (i).
From (21), we have z⋅At=Ak if and only if arg(z)+2π(t−k)/N=2πq for some q∈Z. So if z⋅At=Ak, then
[TABLE]
for some q,q′∈Z. Hence, m(z)+m(z−1)≡0, and m(z)≡t−k, using definition (8). Conversely, suppose m(z)+m(z−1)≡0, and m(z)≡t−k. Since ⌈x⌉+⌈−x⌉ equals either 0 or 1 depending on whether x∈Z or x∈R∖Z respectively, we see that m(z)+m(z−1)≡0 implies −Narg(z)/2π∈Z. Hence, m(z)≡t−k implies arg(z)+2π(t−k)/N=2πq for some q∈Z.
∎
Let σ∈Sr. For (t,t′)∈Z×Z with 1≤t,t′≤r+1, consider:
[TABLE]
Using Lemma 5, and the definition of ≺σ (see conditions (9), (10) and (11)), we get that t≺σt′ if and only if (t,t′) satisfies condition (23), and at least one of the conditions (24) and (25). Now we prove that ≺σ is a strict total order on the set {ℓ∈Z;1≤ℓ≤r+1}.
Proposition 6**.**
For each σ∈Sr, the relation ≺σ is a strict total order on the set {ℓ∈Z;1≤ℓ≤r+1}.
Proof.
As σ remains fixed along the proof, we will exclude it from the notation; furthermore, we will write
M(t,t′):=m(ξσ(t,t′)) and M(t):=m(ξσ(t)) for any 1≤t,t′≤r+1.
Transitivity. Suppose t≺t′ and t′≺t′′. Using condition (9), we have
[TABLE]
Then putting u=ξ(t), v=ξ(t′), w=ξ(t′′) in Lemma 4 (iv), and using (7), the last congruence implies condition (9) for (t,t′′).
Now suppose (t,t′′) satisfies neither (10) nor (11). From (i) and (7) we have M(t,t′′)+M(t′′,t)≡0. Also, we have that the pairs (t,t′), (t′,t′′), and (t,t′′) satisfy condition (9). Thus we have satisfied the hypotheses of Lemma 4 (v) with u=ξ(t), v=ξ(t′), and w=ξ(t′′), and also with u=ξ(t′′), v=ξ(t′), and w=ξ(t). Then M(t,t′)+M(t′,t)≡0 and M(t′,t′′)+M(t′′,t′)≡0, so t′<t and t′′<t′, which contradicts t′′≥t. Therefore, (t,t′′) must satisfy at least one of the conditions (10) and (11).
Trichotomy law. Suppose t′=t (say t′<t). If (t,t′) does not satisfy condition (9), then M(t,t′) is congruent to M(t′)−M(t)+1 by using Lemma 4 (i) with z=ξ(t,t′) and w=ξ(t). Also we have M(t,t′)+M(t′,t)≡1 by using Lemma 4 (ii) with z=ξ(t,t′) and w=ξ(t). Combining these two congruences we get that (t′,t) satisfies conditions (9) and (10), so t′≺t. If (t,t′) satisfies (9), then t≺t′.
Now if t≺t′ and t′≺t, condition (9) for (t,t′) and (t′,t) implies that the pairs (t,t′) and (t′,t) do not satisfy (10), so t<t′ and t′<t, which is absurd. Also, it is clearly impossible that t=t′ and t≺t′.
∎
Corollary 7**.**
Let σ∈Sr, and let (t,t′)∈Z×Z with 1≤t,t′≤r+1. If t≺σt′, then ξσ(t′,t)⋅A∘1+m(ξσ(t))⊂Sm(ξσ(t′)).
Proof.
Again σ remains fixed along the proof, so we will use the notation adopted in the proof of Proposition 6.
Using (7) and Lemma 4 (i), we have that M(t′,t) is congruent to either M(t)−M(t′) or M(t)−M(t′)+1. If M(t′,t)≡M(t)−M(t′), then M(t′,t)+M(t,t′)≡0 by trichotomy. Hence, Lemma 5 (ii) implies that ξ(t′,t)⋅A1+M(t)=A1+M(t′), and so
[TABLE]
by (22). On the other hand, if M(t′,t)≡M(t)−M(t′)+1, then Lemma 5 (i) implies that ξ(t′,t)⋅A1+M(t)⊂SM(t′).
∎
The order ≺σ depends on the permutation
σ∈Sr by definition. In general, we are not interested in studying the behavior of ≺σ with respect to σ, except in the following case.
Lemma 8**.**
Let σ∈Sr. Define σ∈Sr by putting σ(1):=σ(r), and
σ(j):=σ(j−1) for each 2≤j≤r. Consider the set
[TABLE]
and its complement Bσc⊂{1,…,r+1}. Then for any t,t′∈{1,…,r} we have
(i)
ft+1,σ=εσ(r)⋅ft,σ, ξσ(t+1)=εσ(r)(1)⋅ξσ(t), ξσ(t+1,t′+1)=ξσ(t,t′).
2. (ii)
If t,t′∈Bσ or t,t′∈Bσc, then t≺σt′ if and only if t+1≺σt′+1.
3. (iii)
If t∈Bσ and t′∈Bσc, then t≺σt′ and t′+1≺σt+1.
Proof.
Note that since ξσ(r+1)=1 and m(1)=0, we have that r+1∈Bσ for all σ∈Sr, so Bσ=∅. The fact that ft+1,σ=εσ(r)⋅ft,σ follows easily from the definition (4) of ft,σ, and from the definition of σ. Moreover, since fr+1,σ does not depend on σ, we obtain (i) from the definition (6) of ξσ(t), and from (7).
Let us prove (ii). Using (i), we have m(ξσ(t+1,t′+1))≡m(ξσ(t,t′)), so it is clear that (t+1,t′+1) satisfies (10) for σ if and only if (t,t′) satisfies (10) for σ. But (t+1,t′+1) satisfies (11) for σ if and only if (t,t′) satisfies (11) for σ. Now if t,t′∈Bσ, we obtain
[TABLE]
by using (i), so we have that (t+1,t′+1) satisfies (9) for σ if and only if (t,t′) satisfies (9) for σ.
If t,t′∈Bσc, the proof follows analogously, noting that
[TABLE]
To prove (iii), first we will prove t≺σt′ by contradiction; suppose t′≺σt. Since t∈Bσ and t′∈Bσc we have
[TABLE]
where the right-hand side is congruent to m(ξσ(t′,t))+1 by using that (t′,t) satisfies condition (9) for σ, and so congruent to m(ξσ(t′+1,t+1))+1 by using (i). But this contradicts Lemma 4 (i) since N≥3.
Finally, we will prove that t≺σt′ implies t′+1≺σt+1. For the sake of contradiction, suppose that t+1≺σt′+1 and t≺σt′. Thus condition (9) implies that m(ξσ(t′+1))−m(ξσ(t+1)) is congruent to m(ξσ(t+1,t′+1)), and so congruent to m(ξσ(t,t′)) by (i). On the other hand, since t∈Bσ and t′∈Bσc we have
[TABLE]
where the right-hand side is congruent to 1−m(ξσ(t,t′)) since (t,t′) satisfies condition (9) for σ. Hence
[TABLE]
a contradiction. Therefore we have proved (iii).
∎
4.2. Domain of f
The aim of this section is to define the domain of the functions F and F0 mentioned at the beginning of section 4. As we have anticipated in the introduction, this domain is a (r+1)-torus T=D/∼, where D is the closure of a fundamental domain for Rr+1 under the translation action of its subgroup Zr+1, and ∼ identifies points of D lying in the same Zr+1-orbit.
Note that ξσ(r+1)=1, so m(ξσ(r+1))=0 for all σ∈Sr. It follows that (r+1,t) satisfies condition (9) and (11) for all t∈{1,…,r} and σ∈Sr.
for all t∈{1,…,r+1} and σ∈Sr, so there is a unique dt,σ∈Z
such that
[TABLE]
where \sum_{j=1}^{r+1}\arg\!\big{(}\varepsilon_{\sigma(j-1)}^{(1)}\big{)} is independent of σ, and the summands corresponding to j=1 are [math] by definition. Note that in (12)
[TABLE]
Considering (27), and the permutation ρσ∈Sr+1 defined in (12), we can make the following definition.
Definition 9**.**
For t∈{1,…,r+1}, μ=(σ,q,n)∈Sr, and j∈Z, we let
[TABLE]
Also, we define ϕt,μ and ϕr+2,μ∈Rr+1 by putting
[TABLE]
Here, eσ(0)=e0:=0 by definition, and {ei}i=1r+1 is the usual basis of Rr+1.
Lemma 10**.**
For each μ=(σ,q,n)∈Sr, the set {ϕt,μ}t=1r+2 is affinely independent.
Recall that a subset {wi}i=1n of a real vector space V is affinely independent if and only if the set
{wi−wj}1≤i≤ni=j is R-linearly independent for some fixed j∈{1,…,n}.
Proof.
We will prove Lemma 10 by showing that {ϕt,μ−ϕr+2,μ}t=1r+1 is linearly independent in Rr+1. Of course, the set {eσ(t−1)}t=1r+1 is affinely independent in Rr+1. This implies that the set {vt}1≤t≤r+1t=ρσ(q) is linearly independent, where vt equals
∑j=1teσ(j−1)−∑j=1ρσ(q)eσ(j−1),
with the product vter+1T=0 (here, er+1T denote the transpose of er+1). Then, the determinant of the (r+1)×(r+1) matrix
[TABLE]
whose columns are the vectors vt and ϕρσ(q),μ−ϕr+2,μ, is zero because
for all 1≤t≤r+1 with t=ρσ(q). Hence, we can transform the matrix in (29) into the matrix (ϕt,μ−ϕr+2,μ)t=1r+1
using elementary operations. Therefore, the set {ϕt,μ−ϕr+2,μ}t=1r+1 is linearly independent in
Rr+1.
∎
The above lemma implies that every non-empty subset of {ϕt,μ}t=1r+2 is affinely independent in Rr+1.
Now we establish some notation. If w1,…,wℓ are elements of a real vector space W, then the (closed) polytope they generate is the set of convex sums
[TABLE]
(P(∅):=∅). In general, if w=∑t=1ℓbtwt, bt∈R, and ∑t=1ℓbt=1, then the bt are called barycentric coordinates of w
with respect to the set w1,…,wℓ. If w1,…,wℓ is affinely independent, the barycentric coordinates of w are uniquely determined by w, so we can write bt=bt(w).
For any σ∈Sr and any t∈{1,…,r+1}, let
[TABLE]
If x,y∈Rr+1 are vectors such that x(j)=y(j)(1≤j≤r), then we claim that
[TABLE]
for any t∈{1,…,r+1}. To prove (31), it is easy to verify that
[TABLE]
by multiplying x and y by eσ(j)T since x(j)=y(j)(1≤j≤r). Hence, bt=bt′(2≤j≤r+1), and also b1=b1′ since the sum of the barycentric coordinates is 1.
Using the above notation, we define the polytopes
[TABLE]
for μ=(σ,q,n)∈Sr. The next lemma will allow us to give an alternative description of these polytopes.
Lemma 11**.**
Let μ=(σ,q,n)∈Sr. If x(1),…,x(r)∈[0,1] satisfy x(σ(1))≥⋯≥x(σ(r)), there exist unique y1,y2∈R such that (x(1),…,x(r),y1)∈P1,μ and (x(1),…,x(r),y2)∈P2,μ. Furthermore, such y1 and y2 satisfy y1≤y2.
Proof.
Put b1:=1−x(σ(1)), bt:=x(σ(t−1))−x(σ(t))(2≤t≤r), and br+1:=x(σ(r)). Clearly, bt≥0
for all 1≤t≤r+1, and also ∑t=1r+1bt=1. Thus v:=∑t=1r+1btϕt,μ∈P1,μ, and we can check that veσ(j)T=x(σ(j)) for each 1≤j≤r.
Putting y1:=ver+1T, uniqueness follows from (31). Analogously, existence and uniqueness of y2 follow from (30).
Now let us prove the last statement of Lemma 11. Using (31), note that the vectors vy1:=(x(1),…,x(r),y1) and vy2:=(x(1),…,x(r),y2) have equal barycentric coordinates with respect to the vertices {ϕt,μ}t=1r+1 and {ϕt,μ}1≤t≤r+2t=ρσ(q) respectively. Since these sets
differ only in the elements ϕρσ(q),μ and ϕr+2,μ, we deduce that vy2−vy1 equals b(ϕr+2,μ−ϕρσ(q),μ)=Nber+1,
where b is a barycentric coordinate of vy2 with respect to {ϕt,μ}1≤t≤r+2t=ρσ(q). Therefore,
(vy2−vy1)er+1T=y2−y1≥0.
∎
Since both y1 and y2 in Lemma 11 depend on μ∈Sr and on x(1),…,x(r)∈[0,1], we shall write yi,μ(x)=yi(σ,q,n)(x):=yi for any i=1,2, μ=(σ,q,n)∈Sr, and x∈[0,1]r×R such that x(σ(1))≥x(σ(2))≥⋯≥x(σ(r)).
From the proof of Lemma 11, note that v=v(x)=∑t=1r+1bt(x)ϕt,μ is continuous in x since each of the bt=bt(x) is continuous in x. Therefore, y1(x)=v(x)er+1T is also continuous. The same holds for y2(x).
Definition 12**.**
For μ=(σ,q,n)∈Sr, define
[TABLE]
Lemma 11 implies that yi,μ is an affine function, i. e.
[TABLE]
since P1,μ and P2,μ are convex sets. Hence, Dμ is a convex set. Furthermore, ϕt,μ∈Dμ(1≤t≤r+2). In order to verify this, note that
[TABLE]
and
[TABLE]
since ϕt,μ∈P1,μ and ϕr+2,μ∈P2,μ. Thus, P(ϕ1,μ,…,ϕr+2,μ)⊂Dμ. On the other hand, each v∈Dμ is contained in the straight line passing through
[TABLE]
so
[TABLE]
Therefore Lemma 10 implies that the Dμ are (r+1)-simplices.
We shall see next that we can put the Dμ=D(σ,q,n) a top one another so that every intersection of two adjacent simplices is an r-simplex. We shall do this by fixing σ∈Sr and varying q and n. More precisely, fix σ∈Sr. From (12) and Definition 9 we have
[TABLE]
(1≤t≤r+1,t=ρσ(q);2≤q≤r+1;0≤n≤N−1). Also
[TABLE]
(1≤t≤r+1,t=ρσ(1);0≤n≤N−2). Thus we have
[TABLE]
Applying Lemma 11 to the last two identities, we get the following chain of inequalities for any x∈[0,1]r×R such that x(σ(1))≥⋯≥x(σ(r)).
[TABLE]
Note that this chain ends with y2(σ,1,N−1)(x), the only “link” of the chain indexed by 2 instead 1. However, we can index y2(σ,1,N−1)(x) by 1 since
[TABLE]
so y2(σ,1,N−1)(x)=1+y1(σ,r+1,0)(x),
where y1(σ,r+1,0)(x) is the first link of the chain. Hence, in the following we shall write
[TABLE]
Considering the above, put
[TABLE]
where
[TABLE]
We are interested in three properties of D. In the first place, D is a finite union of compact sets, and so is a compact subset of
Rr+1. Secondly, D is the topological closure of a fundamental domain for Rr+1 under the translation action of its subgroup Zr+1. Indeed, the set
[TABLE]
[TABLE]
is such a fundamental domain. The quotient space
[TABLE]
is homeomorphic to the standard (r+1)-torus Rr+1/Zr+1, where ∼ is the identification of elements in the same orbit with respect to this action.
Finally, we will show that the Dμ form a simplicial decomposition of D. Since we have (38), we only need to verify that the Dμ intersect each other in faces. Recall that a face of a polytope P is the polytope generated by a subset of only its vertices. Now we need some technical remarks.
Lemma 13**.**
Let μ=(σ,q,n),μ′=(σ′,q′,n′)∈Sr. Put
[TABLE]
Then the following hold.
(i)
If w∈Rr satisfies w(σ(1))≥⋯≥w(σ(r)) and w(σ′(1))≥⋯≥w(σ′(r)), then w(σ(j))=w(σ′(j)) for all 1≤j≤r.
2. (ii)
Let v∈[0,1]r×R with v(σ(1))≥⋯≥v(σ(r)) and v(σ′(1))≥⋯≥v(σ′(r)). If
[TABLE]
for some bt∈R, then bt=0 whenever t∈Bσ,σ′.
3. (iii)
If t,t′∈Bσ,σ′, then t≺σt′ if and only if t≺σ′t′.
4. (iv)
If t∈Bσ,σ′, then a(t,σ,ℓ)=a(t,σ′,ℓ) for any ℓ∈Z.
Proof.
To prove (i), for the sake of contradiction suppose that w(σ(j))=w(σ′(j)) for some j∈{1,…,r} (say w(σ(j))<w(σ′(j))). Since w(σ(j))<w(σ′(j))≤w(σ′(i)) for all i∈{1,…,j}, there are at least j coordinates of w greater than w(σ(j)). But this contradicts w(σ(1))≥⋯≥w(σ(j)),
which implies that there are at most j−1 of such coordinates.
Let us prove (ii). If t∈{2,…,r+1} is such that {σ(j−1)∣2≤j≤t}={σ′(j−1)∣2≤j≤t} (note that t=r+1) then there exists j∈{2,…,t} such that σ(j−1)=σ′(i) with i∈{t,…,r}. This implies that
[TABLE]
Since v(σ′(j−1))=v(σ(j−1)) (by (i)), we have v(σ′(t−1))=v(σ′(t)). Hence,
v(σ(t−1))=v(σ(t)), and so we conclude bt=0 from the identity
[TABLE]
To show (iii), note that ξσ(t)=ξσ′(t) and ξσ(t′)=ξσ′(t′) for all t,t′∈Bσ,σ′. Thus,
assertion (iii) follows from conditions (9), (10), and (11).
Assertion (iv) follows directly from (27) and from Definition 9.
∎
Lemma 14**.**
Let μ=(σ,q,n),μ′=(σ′,q′,n′)∈Sr. If A⊂{ϕt,μ}t=1r+1 and A′⊂{ϕt,μ′}t=1r+1, then P(A)∩P(A′)=P(A∩A′). Also, this assertion remains valid if we replace both (or one of the) sets {ϕt,μ}t=1r+1 and {ϕt,μ′}t=1r+1 by {ϕ(t,σ,1,N−1)}1≤t≤r+2t=ρσ(1) and {ϕ(t,σ′,1,N−1)}1≤t≤r+2t=ρσ′(1) respectively.
Proof.
First note that in any case A∩A′⊂P(A)∩P(A′), and so P(A∩A′)⊂P(A)∩P(A′) since P(A)∩P(A′) is a convex set. Thus we have only to prove the reverse inclusion. Suppose that P(A)∩P(A′)=∅ (otherwise the inclusion is obvious). Take v∈P(A)∩P(A′) and then expand it in its barycentric coordinates with respect to A and A′: v=∑t=1r+1btϕt,μ=∑t=1r+1bt′ϕt,μ′,
where bt,bt′≥0; ∑t=1r+1bt=∑t=1r+1bt′=1; bt=0 if ϕt,μ∈A, and bt′=0 if ϕt,μ′∈A′. From (33), we know that P(A)⊂Dμ and P(A′)⊂Dμ′, so v(σ(1))≥⋯≥v(σ(r)) and v(σ′(1))≥⋯≥v(σ′(r)). Hence, using (31) and Lemma 13 (ii) we have
[TABLE]
Without loss of generality we can assume n≤n′. First suppose n<n′; we claim that v∈P(A∩A′). Indeed, Definition 9 and Lemma 13 (iv) imply that
(ϕt,μ−ϕt,μ′)er+1T≤0
for all t∈Bσ,σ′. Therefore, bt=bt′>0 implies that ϕt,μ=ϕt,μ′
by (41), and then v∈P(A∩A′). If n=n′, for the sake of contradiction suppose that there exist t,t′∈Bσ,σ′ such that
[TABLE]
Thus, t=t′. If t≺σt′, we have that t≺σt′≺σρσ(q) by Definition 9, Lemma 13 (iv), and the second inequality of (42). That is,
\big{(}\phi_{t,\mu}-\phi(t,\sigma^{\prime},q^{\prime},n)\big{)}e_{r+1}^{T}\geq 0, which contradicts the first inequality of (42). If t′≺σt we have t′≺σ′t≺σ′ρσ′(q′) by Lemma 13 (iii), Definition 9, Lemma 13 (iv), and the first inequality of (42). Therefore, \big{(}\phi_{t^{\prime},\mu}-\phi(t^{\prime},\sigma^{\prime},q^{\prime},n)\big{)}e_{r+1}^{T}\leq 0, which contradicts the second inequality of (42). Thus v∈P(A∩A′), as in the case n<n′.
To prove the last part of the lemma, let us verify the case
A⊂{ϕ(t,σ,1,N−1)}1≤t≤r+2t=ρσ(1) and A′⊂{ϕt,μ′}t=1r+1. Let v∈P(A)∩P(A′). Expanding v in barycentric coordinates,
[TABLE]
Using (31) and Lemma 13 (ii), we conclude that ∑t∈Bσ,σ′btδt=0,
where
[TABLE]
In both cases, Definition 9 and Lemma 13 (iv) show that δter+1T≥0. Therefore,
δt=0 whenever bt>0, which implies that v∈P(A∩A′).
The case A⊂{ϕt,μ}t=1r+1 and A′⊂{ϕ(t,σ′,1,N−1)}1≤t≤r+2t=ρσ′(1) follows as the previous one by symmetry. Finally, the case A⊂{ϕ(t,σ,1,N−1)}1≤t≤r+2t=ρσ(1) and A′⊂{ϕ(t,σ′,1,N−1)}1≤t≤r+2t=ρσ′(1) follows by using (32), (36), and the first part of the lemma.
∎
Lemma 15**.**
Let μ=(σ,q,n),μ′=(σ′,q′,n′)∈Sr. Then there exist q∈{1,…,r+1} and n∈{0,…,N−1} such that y(σ,q,n)(v) equals either y(σ′,q,n)(v) or 1+y(σ′,r+1,0)(v) for all v∈[0,1]r×R satisfying v(σ(1))≥⋯≥v(σ(r)) and v(σ′(1))≥⋯≥v(σ′(r)). Moreover, y(σ,r+1,0)(v)=y(σ′,r+1,0)(v) for all such v.
Proof.
Consider the following three cases.
Case 1. Suppose t≺σρσ(q) for all t∈Bσ,σ′,
and n≤N−2. Using Definition 9, Lemma 13 (iv) and (28), we have ϕt,μ=ϕ(t,σ′,r+1,n+1) for all t∈Bσ,σ′
(q=r+1 and n=n+1) since t≺σ′r+1 for all t∈{1,…,r+1}.
Case 2. Suppose
t≺σρσ(q) for all t∈Bσ,σ′, and n=N−1. Since a(t,σ,N)=1+a(t,σ,0), we get that ϕt,μ=er+1+ϕ(t,σ′,r+1,0) for all t∈Bσ,σ′ by proceeding as in the previous case.
Case 3. If
there exists t∈Bσ,σ′ with t≺σρσ(q), put t0:=mint∈Bσ,σ′{t≺σρσ(q)}. That is,
[TABLE]
(note that Bσ,σ′=∅ since 1∈Bσ,σ′). Define q:=(ρσ′)−1(t0).
If t≺σρσ(q) with t∈Bσ,σ′, then t≺σt0=ρσ′(q). If
t≺σρσ(q) with t∈Bσ,σ′, then t≺σt0 (by the definition of t0). Using Lemma 13 (iii) and Lemma 13 (iv), we have ϕt,μ=ϕ(t,σ′,q,n) for all t∈Bσ,σ′ (n=n). In particular,
ϕ(t,σ,r+1,0)=ϕ(t,σ′,r+1,0) for all t∈Bσ,σ′ (t0=r+1=r+1).
On the other hand, if v∈Rr+1 satisfies v(σ(1))≥⋯≥v(σ(r)) and v(σ′(1))≥⋯≥v(σ′(r)), we can write \big{(}v^{(1)},\dots,v^{(r)},y_{\mu}(v)\big{)} as ∑t∈Bσ,σ′btϕt,μ
by (32), Lemma 11, and Lemma 13 (ii). Therefore, the lemma follows from the three cases above.
∎
From Lemma 15, applied to v∈[0,1]r×R such that v(σ(1))≥⋯≥v(σ(r)) and v(σ′(1))≥⋯≥v(σ′(r)), we have that the links of both chains for v (with σ and σ′) are the same. This fact allows us to finish the proof of the simplicial decomposition of D.
Proposition 17**.**
Let μ=(σ,q,n),μ′=(σ′,q′,n′)∈Sr. Then
[TABLE]
and so D=∪μ∈SrDμ is a simplicial decomposition of D.
Proof.
We have only to verify that the left-hand side of (43) is contained in the right-hand side, as the other inclusion is obvious by (33). Let v∈Dμ∩Dμ′. From Definition 12, we have the next four possibilities:
[TABLE]
In the first three cases, Lemma 11 and Remark 16 imply that v lies in the intersection of two polytopes, as in Lemma 14, and so we have the desired inclusion.
Now suppose y1,μ(v)<v(r+1)<y2,μ(v). In this case, v lies on the straight line passing through the points \big{(}v^{(1)},\dots,v^{(r)},y_{1,\mu}(v)\big{)} and \big{(}v^{(1)},\dots,v^{(r)},y_{2,\mu}(v)\big{)}. Then using Remark 16, Lemma 11, and Lemma 14, we have that these two points lie in P\big{(}\{\phi_{t,\mu}\}_{t=1}^{r+2}\cap\{\phi_{t,\mu^{\prime}}\}_{t=1}^{r+2}\big{)}. Therefore, we have the desired inclusion by convexity.
∎
4.3. The piecewise affine map f
Now we construct the piecewise affine map f mentioned at the beginning of this section. In Proposition 20, we shall define f as a function on D (see (38)) that descends to the quotient T described in (40).
Consider the function
[TABLE]
valid for any x=(x(1),…,x(r+1))∈C×Rr with non-vanishing last coordinate x(r+1). We define V:=ℓ(V)=⟨ε1,…,εr⟩, where
V:=⟨ε1,…,εr⟩ and εj:=ℓ(εj)(1≤j≤r). Here the εj are totally positive independent units of k, as in Theorem 1. It is clear that V acts on \ell\big{(}\mathbb{C}^{*}\times\mathbb{R}_{+}^{r}\big{)}=\mathbb{C}^{*}\times\mathbb{R}_{+}^{r-1} by component-wise multiplication.
Let μ=(σ,q,n)∈Sr. For each t∈Z, choose αt=α(t)∈k∩(C∗×R+r) as in the fourth step of the 7SA. From (21), we can readily verify that
[TABLE]
Since the set {ϕt,μ}t=1r+2 is affinely independent by Lemma 10, we can define Aμ=A(σ,q,n):Rr+1→C×Rr−1 as
the unique affine map such that
[TABLE]
where φt,μ:=ℓ(ft,μ) and ft,μ is defined by
[TABLE]
Except for minors changes in notation, this definition of ft,μ is the one given in (13) and (14). In fact, it is easy to verify that
[TABLE]
At first sight, we do not know if the image of the map Aμ restricted to Dμ is contained in C∗×R+r−1 or not. This issue will be important when we define the function f by using the Aμ. The next lemma answers this question, and will prove important in working with homotopies later. For its proof we shall use the following property of affine maps. Let W and W′ be two real vector spaces. If w∈W has barycentric coordinates bi(1≤i≤ℓ) with respect to w1,…,wℓ, and A:W→W′ is an affine map with A(wi)=pi(1≤i≤ℓ), then the same bi are also barycentric coordinates for A(w) with respect to p1,…,pℓ. Therefore, using definition (46),
[TABLE]
Lemma 18**.**
Let μ=(σ,q,n)∈Sr. Then, for any t∈{1,…,r+2}, we have
[TABLE]
Proof.
We note two properties of the map ℓ defined in (44). If x∈C∗×R+r,
then
[TABLE]
In particular, these properties are satisfied by x=ft,μ, for any t∈Z.
To prove the lemma, first we shall study three cases for Aμ(ϕt,μ)(1≤t≤r+2).
Case 1. Suppose 1≤t≤r+1 and t≺σρσ(q). From (46), we have
[TABLE]
Since t≺σρσ(q), Corollary 7 implies that ξσ(ρσ(q),t)⋅A∘1+m(ξσ(t))⊂Sm(ξσ(ρσ(q))).
Multiplying this inclusion by τ1(fρσ(q),σ)⋅exp(2πin/N), and using (48), we get
[TABLE]
Then, using (51), (45) and (50), the last inclusion implies that
Aμ(ϕt,μ) lies in (fρσ(q),σ(1)⋅SNa(ρσ(q),σ,n))×R+r−1.
Case 2. Suppose that 1≤t≤r+1 and t≺σρσ(q). From (46),
[TABLE]
Since t≺σρσ(q), we have that (23) (respectively (22)) implies
[TABLE]
whenever ρσ(q)≺σt (respectively t=ρσ(q)). Multiplying the last inclusion by
τ1(fρσ(q),σ)⋅exp(2πin/N), and using (48), we get
[TABLE]
Then, using (52), (45) and (50), from the last inclusion we have that
Aμ(ϕt,μ) lies in \big{(}f_{\rho_{\sigma}(q),\sigma}^{(1)}\cdot\mathcal{S}_{Na(\rho_{\sigma}(q),\sigma,n)}\big{)}\times\mathbb{R}^{r-1}.
Case 3. Finally, if t=r+2, we have
[TABLE]
(see (46) and (4.3)). From (22), note that
A∘1+n+m(ξσ(ρσ(q)))⊂Sn+m(ξσ(ρσ(q))).
Multiplying this inclusion by fρσ(q),σ(1), and using (48), we have
[TABLE]
Then, from (53) and (50), we get that
Aμ(ϕt,μ) lies in \big{(}f_{\rho_{\sigma}(q),\sigma}^{(1)}\cdot\mathcal{S}_{Na(\rho_{\sigma}(q),\sigma,n)}\big{)}\times\mathbb{R}^{r-1}.
The lemma follows from (33), (49), and the three previous cases by the convexity of
(fρσ(q),σ(1)⋅SNa(ρσ(q),σ,n))×R+r−1,
a product of convex sets.
∎
Given σ∈Sr, define σ∈Sr by σ(1):=σ(r),
and σ(j):=σ(j−1) for each j∈{2,…,r}. Recall the set of integers
[TABLE]
defined in Lemma 8. From (26), for each t∈{1,…,r}, there exists κt,σ′∈Z such that
[TABLE]
On the other hand, (27) and the definition of σ imply that
[TABLE]
for any t∈{1,…,r}. Multiplying the last expression by −N/2π, we conclude that
[TABLE]
Using (8), the ceiling function ⌈⌉, and dividing by N, we get
Let μ=(σ,q,n)∈Sr be such that ρσ(q)=r+1, and define σ∈Sr by σ(1):=σ(r), and σ(j):=σ(j−1) for each j∈{2,…,r}. Then there exist κμ∈Z, q∈{1,…,r+1}, and n∈{0,…,N−1}, such that we have
[TABLE]
with μ:=(σ,q,n)∈Sr.
Proof.
Let \widetilde{q}:=(\rho_{\widetilde{\sigma}})^{-1}\big{(}1+\rho_{\sigma}(q)\big{)}. We will divide the proof into two cases according to whether ρσ(q)∈Bσ or not.
Case 1. Suppose ρσ(q)∈Bσ. Choose κμ∈Z so that
n-\mathrm{m}\big{(}\varepsilon_{\sigma(r)}^{(1)}\big{)}+\kappa_{\mu}N lies in {0,…,N−1}.
Let \widetilde{n}:=n-\mathrm{m}\big{(}\varepsilon_{\sigma(r)}^{(1)}\big{)}+\kappa_{\mu}N,
and μ:=(σ,q,n)∈Sr.
From Definition 9, (54) and (55), we have for each t∈{1,…,r} that
Case 2. Suppose ρσ(q)∈Bσc. Choose κμ∈Z
so that n-\mathrm{m}\big{(}\varepsilon_{\sigma(r)}^{(1)}\big{)}+1+\kappa_{\mu}N lies in {0,…,N−1}.
Note that the definition of κμ here differs from the one given in case 1.
Let \widetilde{n}:=n+1-\mathrm{m}\big{(}\varepsilon_{\sigma(r)}^{(1)}\big{)}+\kappa_{\mu}N,
and μ:=(σ,q,n). Then, Definition 9, (54) and (55)
imply for each t∈{1,…,r} that
We now construct our piecewise affine map f with domain D:=∪μ∈SrDμ.
Proposition 20**.**
There exists a continuous map f:D→C∗×R+r−1 with the following properties:
(i)
If x∈Dμ, then f(x)=Aμ(x), where Aμ was defined in (46).
2. (ii)
If x∈D and x+er+1∈D, then f(x+er+1)=f(x).
3. (iii)
If x∈D and x+ej+βer+1∈D for some standard basis vector ej of Rr+1 distinct from er+1, and some β∈Z, then
[TABLE]
Proof.
To prove the existence of f and (i), we only need to show that if x∈Dμ∩Dμ′, then Aμ(x)=Aμ′(x). Suppose v=ϕt,μ (1≤t≤r+2) is a vertex of Dμ. Then, using Definition 9, (46), (4.3), and (4), we have
[TABLE]
Since the last expression is independent of μ, we have Aμ(v)=Aμ′(v) whenever v is a vertex of Dμ and of Dμ′. But Proposition 17 implies that Dμ′∩Dμ is a d-simplex (for some 1≤d≤r) whose d+1 vertices are also vertices of Dμ and of Dμ′. An affine map on a d-simplex is uniquely determined by its values on the d+1 vertices, so Aμ(x)=Aμ′(x) for all x∈Dμ′∩Dμ.
To prove (ii), note that (38) shows us that x∈P1(σ,r+1,0)⊂D(σ,r+1,0) for some σ∈Sr. If we write x in its barycentric coordinates with respect to the vertices of P1(σ,r+1,0), x=∑t=1r+1btϕ(t,σ,r+1,0), bt≥0, ∑t=1r+1bt=1,
then using Definition 9,
[TABLE]
where the last equality follows from (36). Hence, using (i), (49), (46), and (48),
[TABLE]
Now let us prove (iii). Since x∈D and x+ej+βer+1∈D, we have that x∈Dμ for some μ=(σ,q,n)∈Sr, where we can suppose σ(r)=j because x(j)=0 (see Definition 12). Writing x in barycentric coordinates with respect to Dμ: x=∑t=1r+2btϕt,μ, bt≥0, ∑t=1r+2bt=1,
note that
[TABLE]
We will divide the proof into two cases, depending on whether ρσ(q)=r+1 or not. First suppose that ρσ(q)=r+1.
Since ∑t=1r+2bt=1 and br+1=0, Lemma 19 implies that there exist κμ∈Z and μ=(σ,q,n)∈Sr such that
[TABLE]
where σ(1):=σ(r) and σ(j):=σ(j−1) (2≤j≤r). Moreover, since x+ej+βer+1∈D,
Definition (38) implies that κμ∈{β−1,β,β+1}. Therefore, using (ii),
On the other hand, putting v=ϕr+2,μ, we can use (66) to compute
[TABLE]
Analogously, putting w=ϕt,μ (1≤t≤r),
[TABLE]
Thus, (69), (70), (49), and (i) imply that the right-hand side of (68) equals
[TABLE]
This, together with (67) proves Proposition 20 in this case.
Now suppose that ρσ(q)=r+1. Then, q=r+1 since ρσ(r+1)=r+1 (see (28)). Note that br+2=br+1=0 since br+2+br+1=0 and br+2,br+1≥0. Here, if x∈Dμ=D(σ,r+1,n), then x∈D(σ,r,n)
since we have ϕ(t,σ,r+1,n)=ϕ(t,σ,r,n) (1≤t≤r) by (34). Therefore, the proof reduces to the case
ρσ(q)=r+1.
∎
Now we define the maps F and F0 mentioned at the beginning of section 4. Recall the (r+1)-torus T, defined in (40) by identifying the elements of
[TABLE]
that lie in the same orbit with respect to the action on Rr+1 of the subgroup Zr+1. Also recall that the set
[TABLE]
defined in (39) is a fundamental domain for this action. Proposition 20 means that the piecewise affine map f:D→C∗×R+r−1 descends to a continuous map F between T and the quotient \big{(}\mathbb{C}^{*}\times\mathbb{R}_{+}^{r-1}\big{)}/\widetilde{V} coming from the action of V:=⟨ε1,…,εr⟩ on C∗×R+r−1 by component-wise multiplication. More precisely, F:\widehat{T}\to\big{(}\mathbb{C}^{*}\times\mathbb{R}_{+}^{r-1}\big{)}/\widetilde{V} is defined by the commutative diagram
[TABLE]
where π and π are the natural quotient maps, and f was defined in Proposition 20.
There is another function between T and \big{(}\mathbb{C}^{*}\times\mathbb{R}_{+}^{r-1}\big{)}/\widetilde{V} that naturally comes from a function on D. We define f0:D→C∗×R+r−1 by
[TABLE]
for all x=(x(1),…,x(r+1))∈D, where powers are defined using the branch of the argument in [−π,π). From (72), it is clear that f0 is a continuous map that satisfies properties (ii) and (iii) of Proposition 20. Thus, f0 descends to a continuous map F_{0}:\widehat{T}\to\big{(}\mathbb{C}^{*}\times\mathbb{R}_{+}^{r-1}\big{)}/\widetilde{V} defined by the commutative diagram
[TABLE]
where π and π are again the natural quotient maps, and f0 was defined in (72).
Let us write, using upper and lower case to distinguish the slightly different domains,
[TABLE]
Note that the function in (75) is used in the sixth step of the 7SA.
Lemma 21**.**
Let LOG and Log be the functions defined respectively in (74) and (75). Then
[TABLE]
In particular, none of the determinants in (76) vanish, both have the same sign, and Λ:=∑j=1rZ⋅LOG(εj)⊂Rr is a full lattice.
Proof.
We follow [DF1, Lemma 19]. Using the identity ∣εj(1)∣2⋅∏i=2rεj(i)=1/εj(r+1)(1≤j≤r),
(76) reduces to showing r+2=det(Ir+Br), where the r×r matrices Ir and Br are, respectively, the identity and the matrix whose first column has only entries equal to 2 and all the other entries are 1’s. But \det(\lambda I_{r}-B_{r})=\lambda^{r-1}\big{(}\lambda-(r+1)\big{)}, using the eigenvalues 0 and r+1 of Br. Setting λ=−1 concludes the proof.
∎
We will soon show that f0(D) is a fundamental domain for the action of V on C∗×R+r−1, but we first make some geometric remarks. If ℓ(ε)=ε∈V satisfies ∣ε(j)∣=1 for all 1≤j≤r (recall r>0), then
∣ε(1)∣=ε(2)=⋯=ε(r+1). Since 1=∣Nk/Q(ε)∣, we have then also ∣ε(r+1)∣=1. Since ε(r+1)>0, we see that
[TABLE]
If ν:C∗×R+r−1→R+r is defined by the formula \big{(}\nu(x)\big{)}^{(j)}:=|x^{(j)}|(1≤j≤r), then Lemma 21 implies that (ν∘f0)(D) is a fundamental domain for the action of ν(V) on R+r. Since the exponential exp(2πix(r+1)) in
(72), restricted to D, runs over the unit circle exactly once, it is clear that each x∈C∗×R+r−1 is in the orbit of some
x∈f0(D) under the action of V. Furthermore, if there are two such elements x,y∈f0(D), then ν(x)andν(y)∈(ν∘f0)(D) belong to the same orbit under the action of ν(V), which implies that ν(x)=ν(y). But this means that x(j)=y(j) for j≥2, and ∣x(1)∣=∣y(1)∣, which implies x=y (see (77)). Therefore, f0(D) is a fundamental domain of C∗×R+r−1 under the action of V, and F_{0}:\widehat{T}\to\big{(}\mathbb{C}^{*}\times\mathbb{R}_{+}^{r-1}\big{)}/\widetilde{V} is surjective.
We now prove that F0 is a homeomorphism. If f1:Rr→C∗×R+r−1 is defined by
[TABLE]
then the composition (LOG∘f1):Rr→Rr is a homeomorphism that satisfies
[TABLE]
Hence, definition (72) and (78) imply that f0 is injective on D. Now take two elements x,y∈D, and denote by [x],[y] their respective cosets in T. If F0([x])=F0([y]), using (73) we have f0(x)=u⋅f0(y) for some u∈V. But f0(y) and u⋅f0(y) lie in f0(D), which implies that u=1 since f0(D) is a fundamental domain for the action of V on C∗×R+r−1. Hence, x=y since f0 is injective on D. Therefore, F_{0}:\widehat{T}\to\big{(}\mathbb{C}^{*}\times\mathbb{R}_{+}^{r-1}\big{)}/\widetilde{V} is a continuous bijective map on a compact set. So F0 is a homeomorphism, and the quotient
[TABLE]
is an (r+1)-torus.
Now let us prove a result for f0 analogous to Lemma 18, which will allow us to define a homotopy between
F and F0. Recall that
[TABLE]
where ω:Rr+1→R is the R-linear map
[TABLE]
Lemma 22**.**
Let μ=(σ,q,n)∈Sr. Then
[TABLE]
Proof.
Put \theta_{t,\sigma}:=\arg\!\Big{(}\xi_{\sigma}(t)\cdot\mathrm{exp}\big{(}2\pi i\mathrm{m}(\xi_{\sigma}(t))/N\big{)}\Big{)}. We claim
[TABLE]
For the sake of contradiction, suppose t≺σt′ and θt,σ>θt′,σ. From (27), there exists q∈Z such that
[TABLE]
Evaluating the ceiling function at the last expression we contradict condition (9), and so we have proved (81).
In proving Lemma 22, (72) implies that we have only to worry about the first coordinate of the elements in f0(Dμ). We only have to study three cases for ω(ϕt,μ) with t∈{1,…,r+2}.
Case 1. If 1≤t≤r+1 with t≺σρσ(q), then Definition 9, (81), and (27) imply
[TABLE]
since \arg\!\big{(}\varepsilon_{j}^{(1)}\big{)}=\arg\!\big{(}\widetilde{\varepsilon}_{j}^{(1)}\big{)} for all 1≤j≤r.
Case 2. If 1≤t≤r+1 with ρσ(q)≺σt, then Definition 9, (81), and (27) imply
[TABLE]
Case 3. If t=ρσ(q) or t=r+2,
[TABLE]
Therefore, using the linearity of ω, and the convexity of Dμ and [0,2π/N], the above three cases allow us to claim that ω(Dμ) is contained in
[TABLE]
Thus, the proof follows from definition (20), and from the identity
[TABLE]
∎
The next lemma summarizes the properties of F and F0 that we shall use later.
Lemma 23**.**
Let F,F0:T→T be the functions defined by the diagrams (71) and (73), where T:=\big{(}\mathbb{C}^{*}\times\mathbb{R}_{+}^{r-1}\big{)}/\widetilde{V}. Then F is homotopic to F0, and F0 is a homeomorphism between the (r+1)-tori T and T.
Proof.
By the discussion following Lemma 21, we have only to show that F and F0 are homotopic. For x∈D and λ∈[0,1], consider fλ(x):=λf(x)+(1−λ)f0(x)∈C×R+r−1. Since x∈D, there exists μ=(σ,q,n)∈Sr such that x∈Dμ. Using Lemma 18 and Lemma 22, we have that f(x)(1) and f0(x)(1) lie in fρσ(q),σ(1)⋅SNa(ρσ(q),σ,n)⊂C∗. But SNa(ρσ(q),σ,n) is a convex set, so
[TABLE]
Hence, we can define fλ:D→C∗×R+r−1 by fλ(x)=λf(x)+(1−λ)f0(x). Clearly, (λ,x)↦fλ(x) is continuous.
Suppose x∈D and x+er+1∈D. Then, using Lemma 20 (ii) and (72), we have
[TABLE]
Now suppose x∈D, and x+ej+βer+1∈D for some standard basis vector ej of Rr+1 distinct from er+1, and some β∈Z. Then, using Lemma 20 (iii) and (72), we have
[TABLE]
Therefore, fλ descends to a homotopy Fλ:T→T between F0 and F.
∎
We end this section with some computations which we will need when we determine the local and global degrees of F and F0.
Lemma 24**.**
Consider C×Rr−1=Rr+1 as a real vector space. For μ∈Sr, let Lμ:Rr+1→Rr+1 be the linear part of the affine map Aμ defined in (46). That is, Lμ is the unique R-linear map such that Aμ−Lμ is constant. Then,
[TABLE]
where det(Lμ) is the determinant of Lμ, and det(f1,μ,f2,μ,…,fr+2,μ) is the determinant of the (r+2)×(r+2) matrix having columns fi,μ.
On the other hand, if P is an interior point of the set D defined in (38), then
[TABLE]
where \det\!\big{(}\mathrm{d}[f_{0}]_{P}\big{)} is the Jacobian at P of the function f0:D→Rr+1 defined in (72), LOG:C∗×R+r−1→Rr is defined by \big{(}\mathrm{LOG}(x)\big{)}^{(j)}:=\log|x^{(j)}| (1≤j≤r), and \det\!\big{(}\mathrm{LOG}(\widetilde{\varepsilon}_{1}),\dots,\mathrm{LOG}(\widetilde{\varepsilon}_{r})\big{)} is the determinant of the r×r matrix having columns LOG(εi).
Now we compute the values of Lμ on the standard basis {ej}1≤j≤r+1 of Rr+1. Since ϕr+2,μ−ϕρσ(q),μ=(1/N)er+1, putting t=ρσ(q) in (84) we conclude that
Let Pσ:Rr+1→Rr+1 be the linear map determined by Pσ(et):=eσ(t), where σ∈Sr+1 is defined by σ(r+1):=r+1, and σ(t):=σ(t) for each 1≤t≤r. Note that sgn(σ)=sgn(σ)=det(Pσ). We have already proved that
[TABLE]
By (85) and (86), we get that the right-hand side of (87) equals
[TABLE]
using elementary column operations. Adding the first column above to the second, then the second to the third, and so on until adding the (r−1)-th column to the r-th, we find that sgn(σ)⋅det(Lμ) equals
[TABLE]
Adding the column φρσ(q),μ−φ1,μ above to the last one, we obtain
[TABLE]
Since φμ:=ℓ(ft,μ)∈C×Rr−1=Rr+1, the (r+1)×(r+1) determinant in (88) is related to the (r+2)×(r+2) determinant in the right-hand side of (82) by the identity
[TABLE]
valid for any wi∈C×Rr=Rr+2 with wi(r+1)>0 (1≤i≤r+2). 444To prove this identity, start with the matrix (w1,…,wr+2), divide the ith column (i. e. wi) by wi(r+1) for all 1≤i≤r+2. This makes no change in the sign of the determinant as wi(r+1)>0. Now subtract the first column from each of the other columns and expand by the last row.
Combining this with (88), we get formula (82).
where ω is the R-linear map defined in (80). To compute \mathrm{sign}\big{(}\!\det\!(\mathrm{d}[f_{0}]_{P})\big{)}, consider the change of coordinates
[TABLE]
Hence, f0=C∘f0 in some neighborhood of P, and \det\!\big{(}\mathrm{d}[\mathcal{C}]_{\widetilde{f}_{0}(P)}\big{)}=\big{|}f_{0}(P)^{(1)}\big{|}.
Computing the corresponding partial derivatives, we obtain
The properties used here concerning topological degree theory are summarized in [DF1, Proposition 21]. Recall the (r+1)-tori T:=D/∼ and T:=\big{(}\mathbb{C}^{*}\times\mathbb{R}_{+}^{r-1}\big{)}/\widetilde{V} defined respectively in (40) and (79). Also recall
the commutative diagrams
[TABLE]
defining F0 and F. In the following, fix an orientation of the real vector space C×Rr−1=Rr+1, and use it to fix orientations in T and T. Since π:D→T
restricted to D∘ is a local homeomorphism, and the tori are connected and oriented, we orient T by declaring π an orientation-preserving map. Here, the open set D∘⊂Rr+1 has the induced orientation. Thus, the local degree
of π at any point of D∘ is +1. To orient T,
give the induced orientation to C∗×R+r−1⊂C×Rr−1=Rr+1, and orient T by declaring π:C∗×R+r−1→T a local homeomorphism of local degree
+1.
5.2.1. Global degree
Let F:T→T be the map defined in (71). The degree deg(F) of F is defined since F is a continuous map between compact oriented manifolds. We shall prove that
[TABLE]
To verify this formula, note that the homotopy in Lemma 23 shows that deg(F)=deg(F0) [DF1, Proposition 21 (6)]. So we have only to prove that
deg(F0) is given by the right-hand side of (90). Since F0 is a homeomorphism between connected manifolds, deg(F0) equals
the local degree locdegπ(P)(F0) of F0 at π(P) for any P∈D∘. Thus,
deg(F0)=locdegπ(P)(F0) for all P∈D∘. From (89), we have F0∘π=π∘f0, and f0 is a local homeomorphism around P. Then for P in the interior D∘ of D,
[TABLE]
by [DF1, Proposition 21 (7)] since π and π has local degree +1. The local degree at P of the local diffeomorphism f0
is given by (83) [DF1, Proposition 22]. Therefore, (90) follows from (76).
5.2.2. Local degree
The local degree of F:T→T can be easily computed at points where F is a local diffeomorphism. If x is an interior point of the simplex Dμ, and wμ=0, then the local degree locdegπ(x)(F) of F at π(x) is defined, and
[TABLE]
To verify this formula, using (89) we have F∘π=π∘f. Since f restricted to Dμ is the bijective affine map Aμ whenever wμ=0 (see [DF1, Lemma 15]), it is clear that f is a local diffeomorphism around x. But π and π are local diffeomorphisms of degree +1, so F is a local diffeomorphism around π(x). Then
locdegπ(x)(F)=locdegx(f). Finally, using [DF1, Proposition 22], we have that (91) follows from (82).
5.3. Preliminary results
The next lemma shows that the vector [0,0,…,0,1]∈C×Rr cannot lie in any of the Hi,μ
(μ∈Sr), as we mentioned in the remarks after the 7SA (see (17)). As always, we suppose r>0.
Lemma 25**.**
Let v1,v2,…,vℓ∈k with ℓ<[k:Q]=r+2, let τj:k→C the r+2 distinct embeddings of k into C (with τ1 and τr+2 the non-real embeddings, τ1=τr+2), and define J:k→C×Rr by
\big{(}\widetilde{J}(v)\big{)}^{(j)}:=\tau_{j}(v) for v∈k and 1≤j≤r+1. Then er+2:=[0,0,…,0,1]∈C×Rr does not lie in the R-subspace
[TABLE]
Proof.
Suppose er+2 lies in R⋅J(v1)+⋯+R⋅J(vℓ).
This means that there are scalars cj∈R such that
[TABLE]
Using the definition of J, we have c1τ1(v1)+⋯+cℓτ1(vℓ)=0 in the first coordinate of the last equation (recall r>0). Then, taking the complex conjugate,
[TABLE]
Hence, if we define J:k→Cr+2 by \big{(}J(v)\big{)}^{(1)}:=\tau_{1}(v), \big{(}J(v)\big{)}^{(2)}:=\tau_{r+2}(v), and \big{(}J(v)\big{)}^{(j)}:=\tau_{j-1}(v)
for v∈k and 3≤j≤r+2, we have that the vector [0,0,…,0,1]∈Cr+2 can be written as c1J(v1)+⋯+cℓJ(vℓ). But [DF1, Lemma 9] shows that [0,0,…,0,1]∈Cr+2 cannot lie in C⋅J(v1)+⋯+C⋅J(vℓ), so we have a contradiction.
∎
We will prove that {Cμ,wμ}wμ=0
(see (7) and (15)) is a signed fundamental domain for the action of V on C∗×R+r by showing that {Cμ,wμ}wμ=0 is related to
a signed fundamental domain for the action of V on C∗×R+r−1. For μ=(σ,q,n)∈Sr, we define
[TABLE]
for each wμ=0 and t∈{1,…,r+2}, where ft,μ∈C∗×R+r is defined in (4.3). The closure of cμ in C×Rr−1 is
[TABLE]
where f is the function defined in Proposition 20.
Lemma 26**.**
If {cμ,wμ}wμ=0 satisfies
[TABLE]
where the cardinality of cμ∩V⋅y is bounded independently of y, then {Cμ,wμ}wμ=0 is a signed fundamental domain for the action of V on C∗×R+r.
Proof.
The proof in [DF1, Proposition 10] works in our case as it only involves the underlying real vector space structure.
∎
Define
[TABLE]
where ∂cμ is the boundary of cμ in C×Rr−1. Note that cμ⊂B when wμ=0, for then cμ coincides with its boundary ∂cμ.
Now define Jμ(y)⊂V as
[TABLE]
Then we have the following lemma.
Lemma 27**.**
For any y∈C∗×R+r−1 and μ∈Sr, there exists Tμ(y)∈(0,1) such that Tμ(y)≤t<1 implies Jμ(y)=Jμ(ty) and ty∈Bμ.
Proof.
Again the proof in [DF1, Lemma 25] applies verbatim to our case.
∎
5.4. End of the proof
From Lemma 26, to establish Theorem 1, we have to prove (92), and that for any μ∈Sr the set cμ∩V⋅y is bounded independently of y∈C∗×R+r−1. The last part follows using the surjective group homomorphism LOG:C∗×R+r−1→Rr defined in (74). Indeed, since LOG(cμ) is compact and LOG(V) is a lattice,
we have only to show that there are no two (distinct) elements u,v∈V such that LOG(u⋅y)=LOG(v⋅y). But
LOG(u⋅y)=LOG(v⋅y) implies ∣(uv−1)(j)∣=1
for all 1≤j≤r. Therefore, since V=ℓ(V), we have that (77) implies u=v.
Note that the above also implies that Jμ(y)={ε∈V∣ε⋅y∈cμ} is finite (possibly empty) for all μ∈Sr and y∈C∗×R+r−1. Furthermore, we have
[TABLE]
Now we prove (92) at a point y∈(C∗×R+r−1)∖B, where B was defined in (93). Let α:=π(y)∈T∖π(B). Since deg(F)=±1=0, we have that F is surjective (see [DF1, Proposition 21 (3)]). Let δ∈F−1(α)⊂T, and suppose x∈D satisfies π(x)=δ. Then \alpha=F\big{(}\widehat{\pi}(x)\big{)}=\pi\big{(}f(x)\big{)}. If x∈∂Dμ for some μ∈Sr, then f(x)∈f(∂Dμ)⊂∂cμ⊂B, contradicting α∈π(B). Thus, x∈∂Dμ for any μ∈Sr. Similarly, x∈Dμ for any μ∈Sr such that wμ=0. Since wμ=0, the map f=Aμ gives a bijection between the interior of Dμ and the interior of cμ. It follows that f is a local homeomorphism in a neighborhood of x, as are π and π. Hence F is a local homeomorphism in a neighborhood of δ. Thus, δ=π(x) with x in the interior D∘μ of some Dμ, and wμ=0. Moreover, as π restricted to D∘ is a bijection onto its image, there is a unique point x∈π−1(δ). Also, f(x) is in the interior of cμ, so f(x)∈cμ.
Now we calculate as in [DF1] using (91), the invariance of the degree under homotopy, and the local-global principle of topological degree theory555Note that F−1(α) is finite since cμ∩V⋅y is finite, and since the map f=Aμ gives a bijection between the interior of Dμ and the interior of cμ for all y∈C∗×R+r−1 and μ∈Sr. (see [DF1, Proposition 21 (6) and (9)]),
[TABLE]
since vμ=deg(F)wμ by (15), (90) and (91). On dividing both sides by deg(F)=±1, (92) follows for y∈(C∗×R+r−1)∖B.
We can now prove (92) for any y∈C∗×R+r−1. Lemma 27 shows the existence of y0=y0(y)∈C∗×R+r−1 such that Jμ(y0)=Jμ(y) and y0∈Bμ for all μ∈Sr. Thus y0∈B:=∪μBμ. In particular, we know that (92) holds for y0. Hence, using (94),
[TABLE]
Bibliography9
The reference list from the paper itself. Each links out to its DOI / PubMed record.
1[Co 1] P. Colmez, Résidu en s = 1 𝑠 1 s=1 des fonctions zêta p 𝑝 p -adiques , Invent. Math. 91 (1988), 371–389.
2[Co 2] P. Colmez, Algébricité des valeurs spéciales de fonctions L 𝐿 L , Invent. Math. 95 (1989), 161–205.
3[DF 1] F. Diaz y Diaz and E. Friedman, Signed fundamental domains for totally real number fields , Proc. London Math. Soc. (to appear) (2013), available at http://arxiv.org/abs/1303.3989.
4[DF 2] F. Diaz y Diaz and E. Friedman, Colmez cones for fundamental units of totally real cubic fields , J. Number Th. 132 (2012), 1653–1663.
5[Ne] J. Neukirch, Algebraic number theory , Grundlehren der mathematischen Wissenschaften 322 , Berlin: Springer-Verlag (1999).
6[Ok] R. Okazaki, On a Shintani decomposition for a cubic field defined by X 3 + k X − 1 = 0 superscript 𝑋 3 𝑘 𝑋 1 0 {X}^{3}+k{X}-1=0 , Number Theory: Diophantine, Computational and Algebraic Aspects. Proceedings of the International Conference Held in Eger, Hungary, J ([De Gruyter Proceedings in Mathematics]) (1998), 445–451.
7[RS] T. Ren and R. Sczech, A refinement of Stark’s conjecture over complex cubic number fields , J. Number Th. 129 (2009), 831–857.
8[Sh 1] T. Shintani, On evaluation of zeta functions of totally real algebraic number fields at non-positive integers , J. Fac. Sci. Univ. Tokyo, Sec. IA 23 (1976), 393–417.
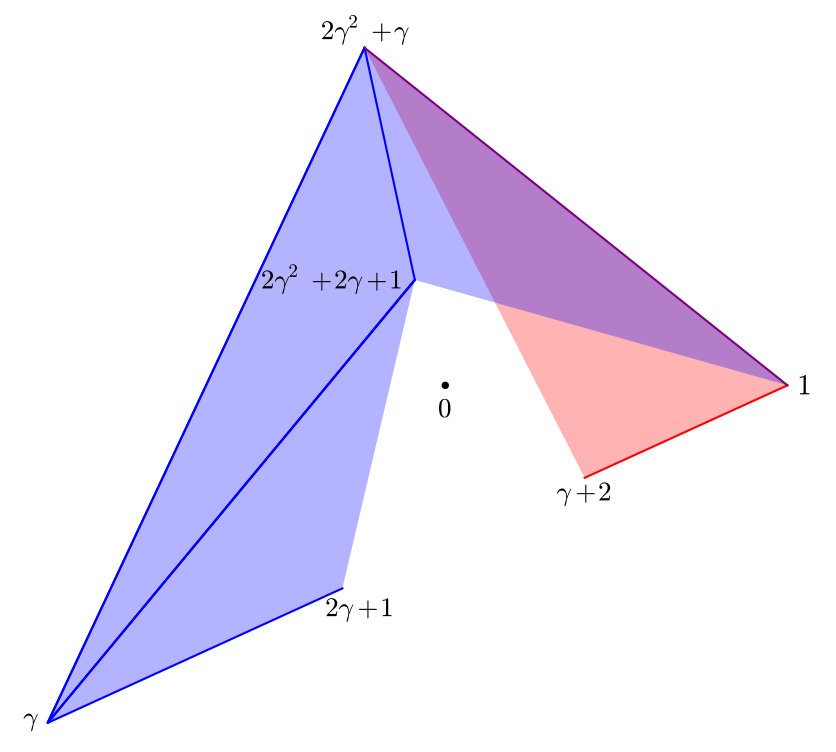 Figure 1
Figure 1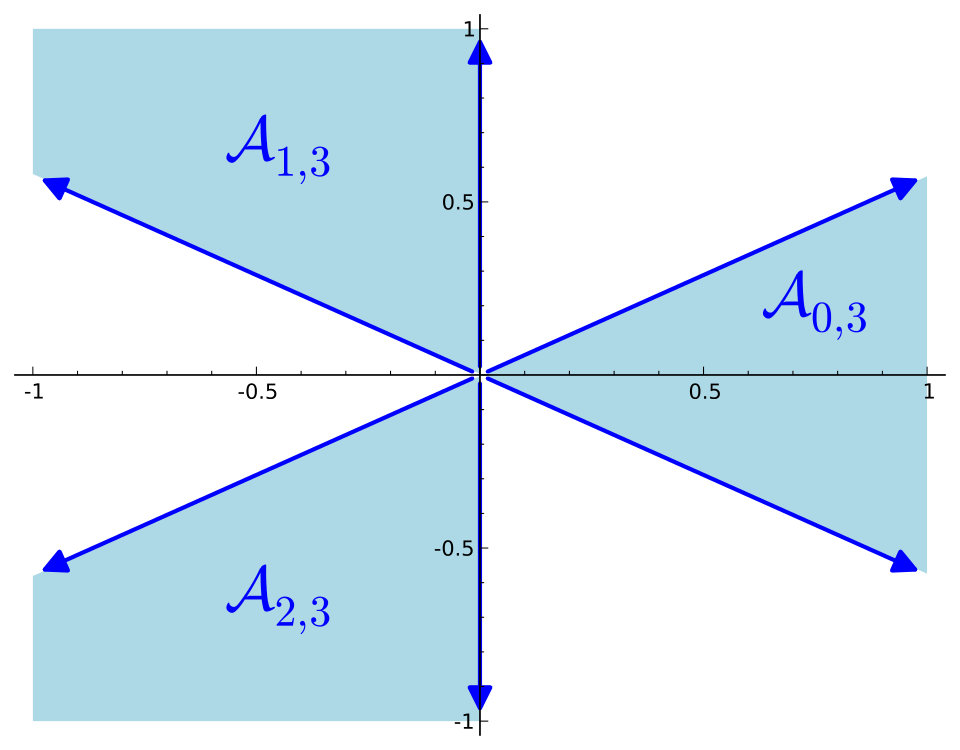 Figure 2
Figure 2