Order allocation, rack allocation and rack sequencing for pickers in a mobile rack environment
Cristiano Arbex Valle, John E Beasley

TL;DR
This paper addresses the complex problem of allocating orders and mobile racks to pickers in robotic fulfillment systems, proposing formulations, heuristics, and sequencing methods validated on large, publicly available test data.
Contribution
It introduces a novel integer programming formulation for order and rack allocation, along with heuristics and a rack sequencing approach, tailored for robotic mobile fulfillment environments.
Findings
Heuristics effectively solve large instances with up to 150 orders and racks.
Feasible rack sequences can be generated by focusing on a subset of orders.
Computational results demonstrate the approach's scalability and practical applicability.
Abstract
In this paper we investigate the problem of simultaneously allocating orders and mobile storage racks to static pickers. Here storage racks are allocated to pickers to enable them to pick all of the products for the orders that have been allocated to them. Problems of the type considered here arise in facilities operating as robotic mobile fulfilment systems. We present a formulation of the problem of allocating orders and racks to pickers as an integer program and discuss the complexity of the problem. We present two heuristics (matheuristics) for the problem, one using partial integer optimisation, that are directly based upon our formulation. We also consider the problem of how to sequence the racks for presentation at each individual picker and formulate this problem as an integer program. We prove that, subject to certain conditions being satisfied, a feasible rack sequence for…
Click any figure to enlarge with its caption.
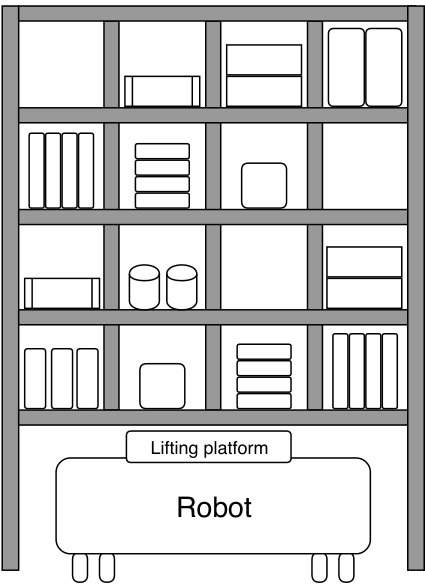 Figure 1
Figure 1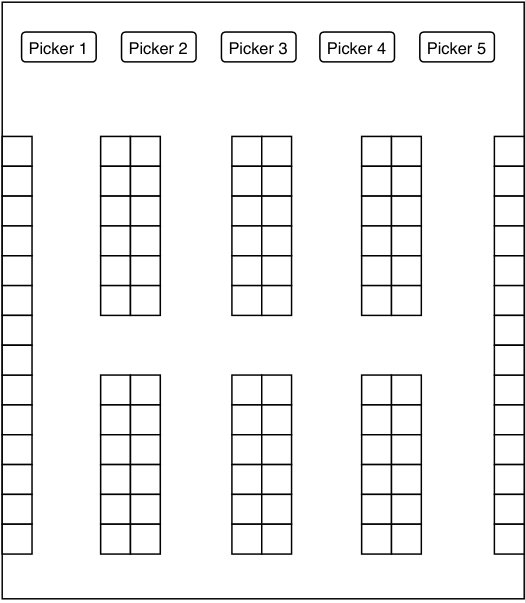 Figure 2
Figure 2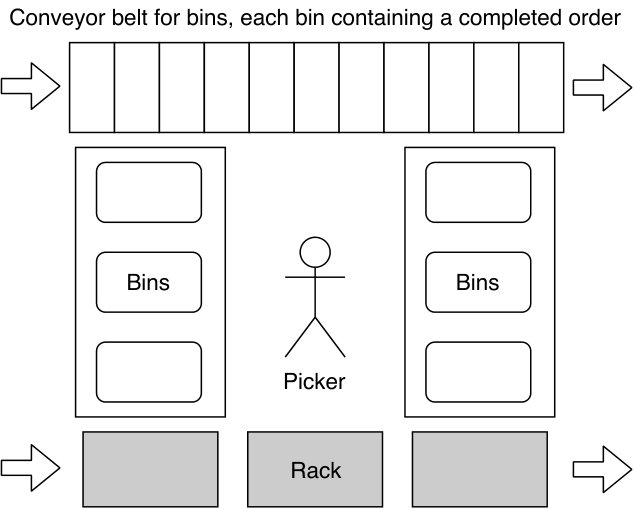 Figure 3
Figure 3Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.