Non-line-of-sight 3D imaging with a single-pixel camera
G. Musarra, A. Lyons, E. Conca, Y. Altmann, F. Villa, F. Zappa, M. J., Padgett, and D. Faccio

TL;DR
This paper presents a novel method for real-time, high-resolution 3D imaging of hidden scenes using a single-pixel camera combined with back-projection algorithms and high-resolution time-of-flight data, enabling color reconstruction without mechanical scanning.
Contribution
It introduces a new approach for non-line-of-sight 3D imaging that achieves full color and high resolution with fast acquisition times using a single-pixel detector.
Findings
Successful 3D color reconstruction of hidden scenes
Imaging with no mechanical scanning parts
Sub-second acquisition times
Abstract
Real time, high resolution 3D reconstruction of scenes hidden from the direct field of view is a challenging field of research with applications in real-life situations related e.g. to surveillance, self-driving cars and rescue missions. Most current techniques recover the 3D structure of a non-lineof-sight (NLOS) static scene by detecting the return signal from the hidden object on a scattering observation area. Here, we demonstrate the full colour retrieval of the 3D shape of a hidden scene by coupling back-projection imaging algorithms with the high-resolution time-of-flight information provided by a single-pixel camera. By using a high effciency Single-Photon Avalanche Diode (SPAD) detector, this technique provides the advantage of imaging with no mechanical scanning parts, with acquisition times down to sub-seconds.
Click any figure to enlarge with its caption.
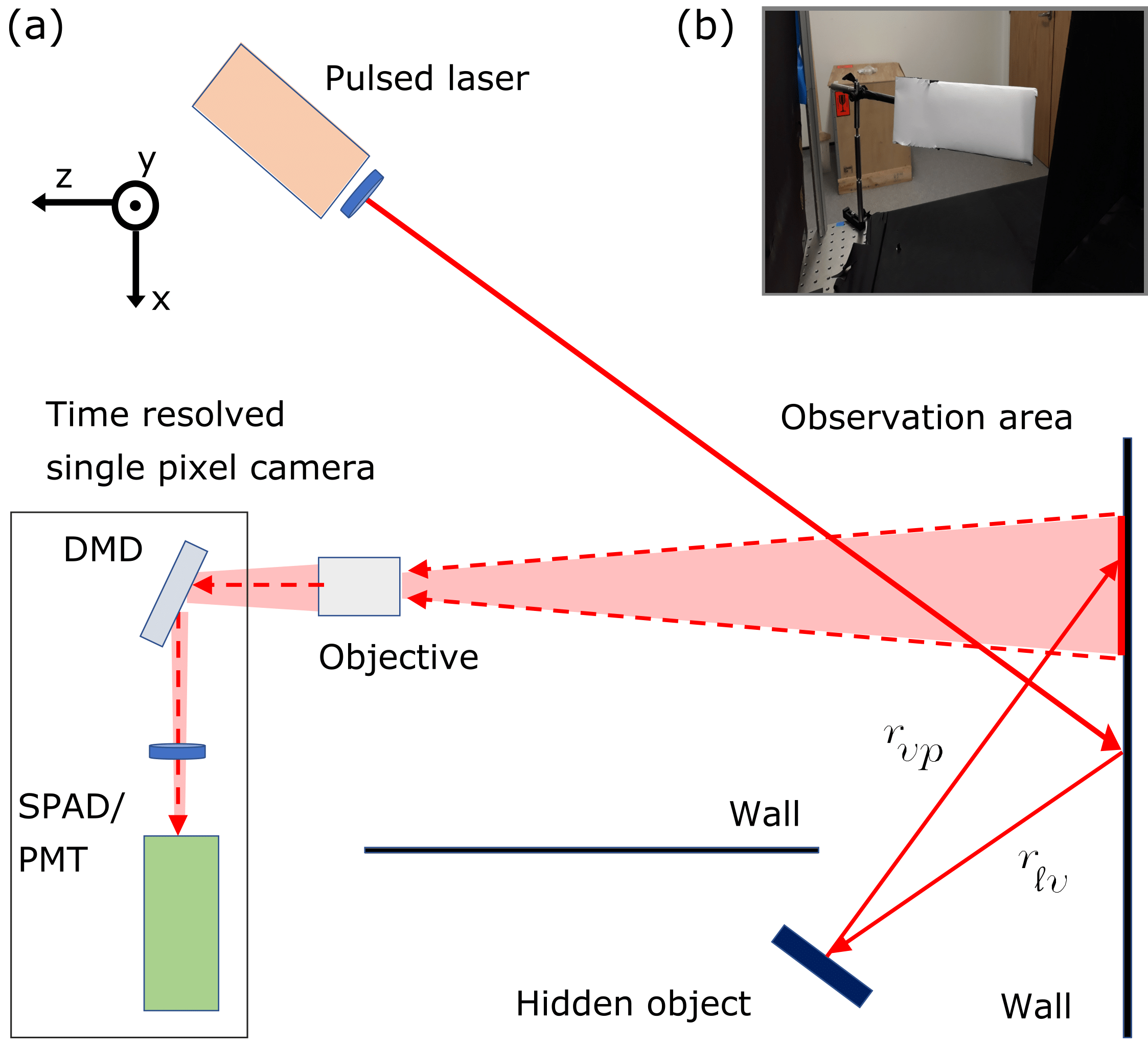 Figure 1
Figure 1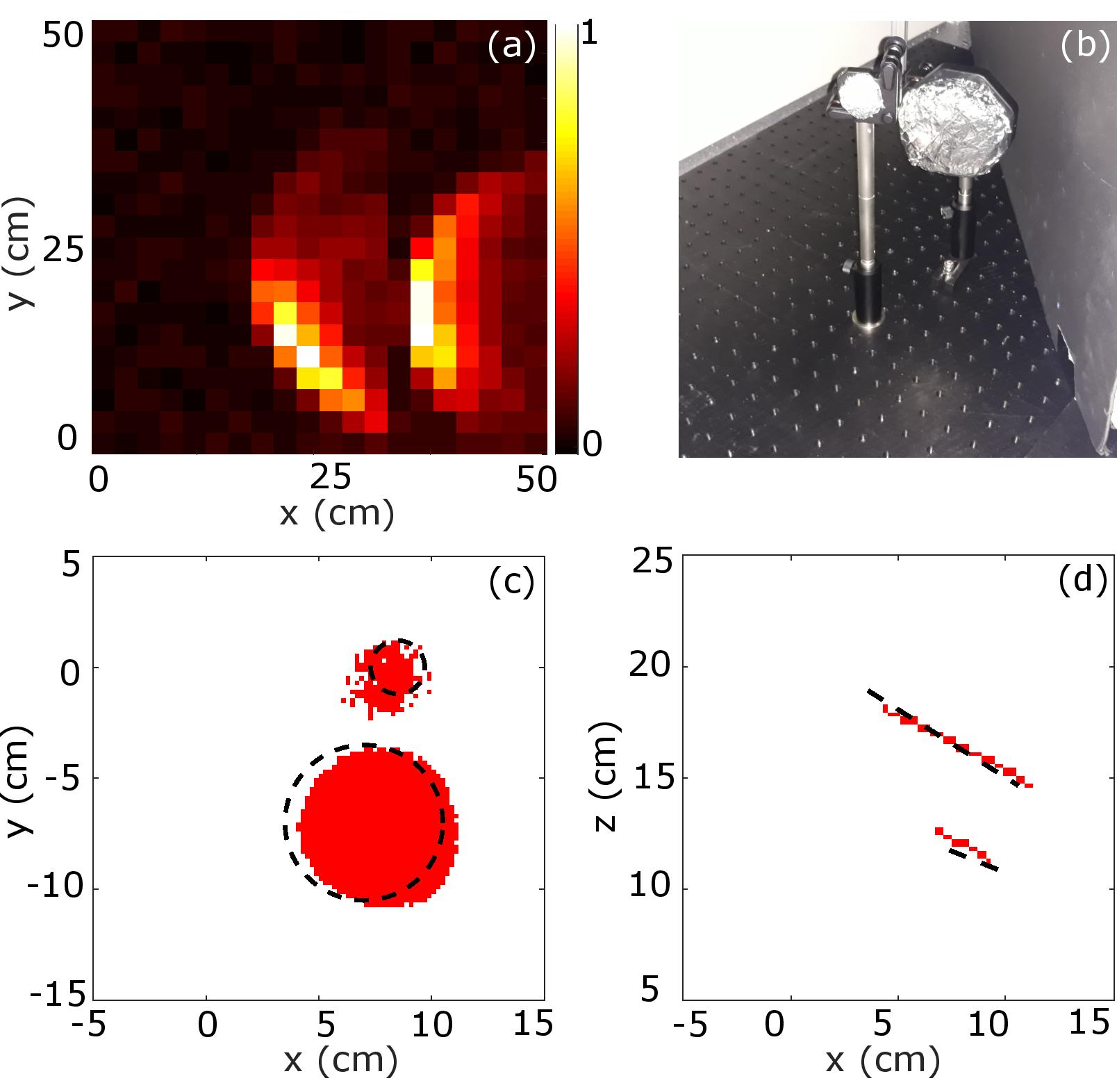 Figure 2
Figure 2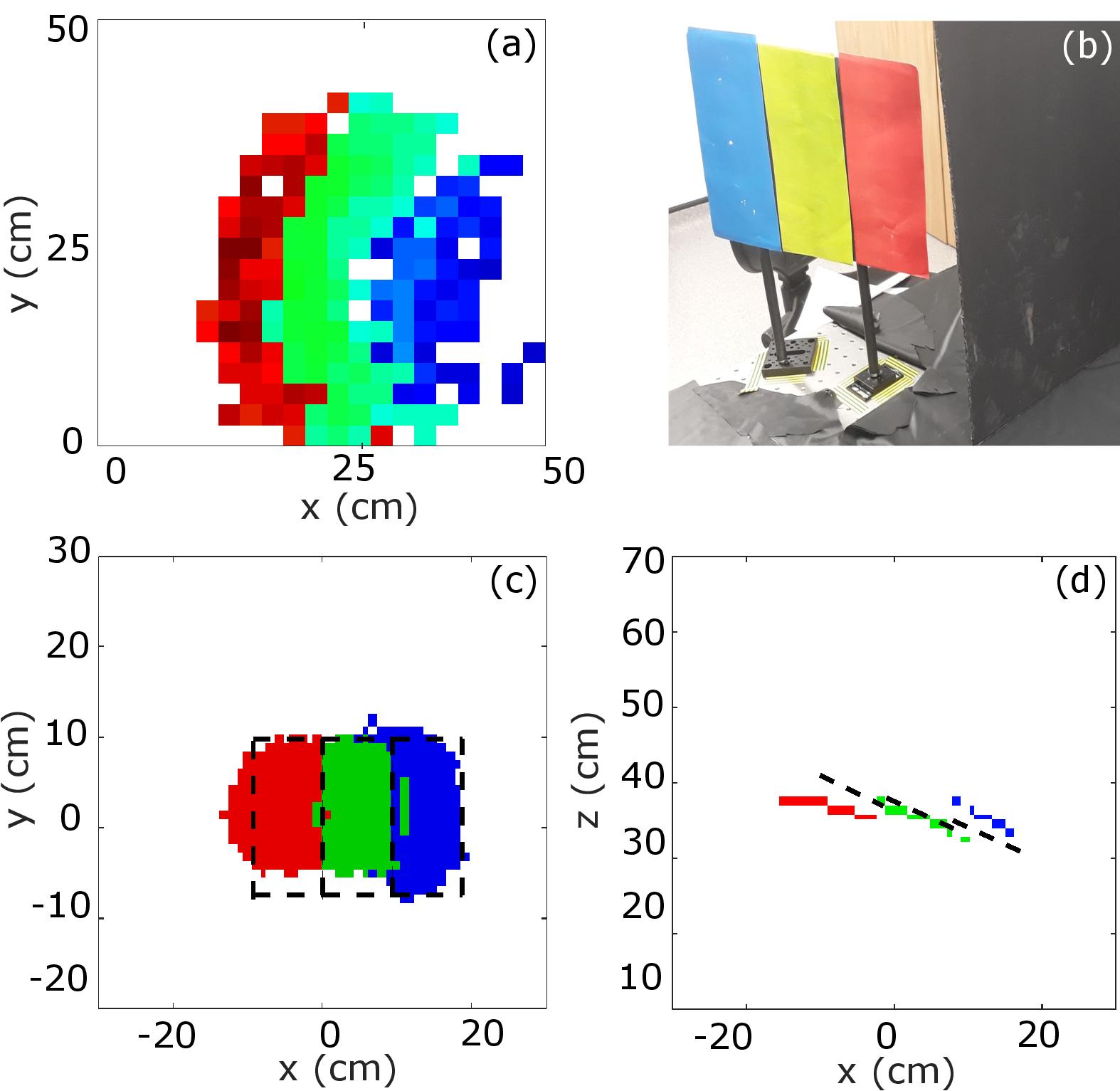 Figure 3
Figure 3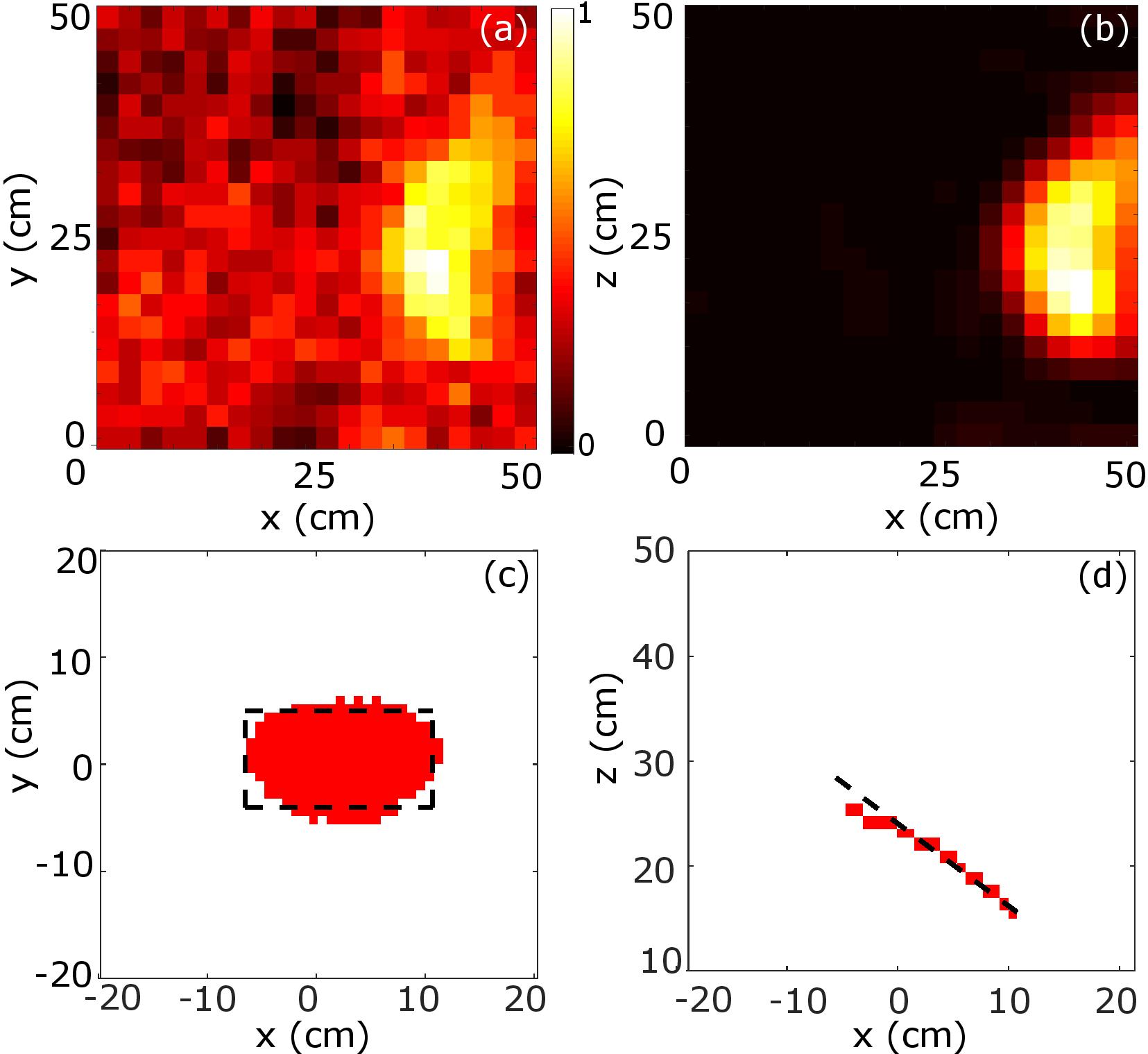 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Non-line-of-sight 3D imaging with a single-pixel camera
G. Musarra
School of Physics & Astronomy, University of Glasgow, Glasgow G12 8QQ, UK.
A. Lyons
School of Physics & Astronomy, University of Glasgow, Glasgow G12 8QQ, UK.
E. Conca
Dipartimento di Elettronica, Informazione e Bioingegneria, Politecnico di Milano, 20133 Milano, Italy
Y. Altmann
School of Engineering and Physical Sciences, Heriot-Watt University, Edinburgh EH144AS, UK.
F. Villa
Dipartimento di Elettronica, Informazione e Bioingegneria, Politecnico di Milano, 20133 Milano, Italy
F. Zappa
Dipartimento di Elettronica, Informazione e Bioingegneria, Politecnico di Milano, 20133 Milano, Italy
M. J. Padgett
School of Physics & Astronomy, University of Glasgow, Glasgow G12 8QQ, UK.
D. Faccio
School of Physics & Astronomy, University of Glasgow, Glasgow G12 8QQ, UK.
Abstract
Real time, high resolution 3D reconstruction of scenes hidden from the direct field of view is a challenging field of research with applications in real-life situations related e.g. to surveillance, self-driving cars and rescue missions. Most current techniques recover the 3D structure of a non-line-of-sight (NLOS) static scene by detecting the return signal from the hidden object on a scattering observation area. Here, we demonstrate the full colour retrieval of the 3D shape of a hidden scene by coupling back-projection imaging algorithms with the high-resolution time-of-flight information provided by a single-pixel camera. By using a high efficiency Single-Photon Avalanche Diode (SPAD) detector, this technique provides the advantage of imaging with no mechanical scanning parts, with acquisition times down to sub-seconds.
pacs:
Valid PACS appear here
††preprint: APS/123-QED
The identification of scenes hidden from the direct line-of-sight, as happens for objects hidden behind an occluder or wall, is a challenging imaging task with applications in defence, surveillance and self-driving vehicles faccio2018trillion . Non-line-of-sight (NLOS) imaging has been demonstrated by using radar systems sume2009radar , wavefront shaping katz2012looking and speckle correlation katz2014non ; faccio2018trillion ; altmann2018quantum and recently even with passive cameras capturing light originating from behind a wall using an ordinary digital camera goyal2019 . Most approaches in this field have demonstrated how to identify the hidden scene by collecting the light scattered back by hidden objects with a system similar to light detection and ranging (LIDAR) by using the time-of-flight information of the back scattered signal wandinger2005introduction ; schwarz2010lidar ; kirmani2011looking ; buttafava2015non ; pediredla2017reconstructing . This technique typically involves a pulsed laser beam pointed on a scattering surface, producing a spherical wave propagating into the hidden scene. When the spherical wave hits the hidden object, the light is then scattered back towards the scattering surface. Collecting the third bounce echo scattered from the hidden object allows the detection and identification of hidden scene by advanced 3D reconstruction algorithms velten2012recovering . Past results have demonstrated how this technique can be used for tracking a moving hidden object even over large distances gariepy2016detection ; chan2017non and for the retrieval of the 3D shape of a static hidden object by using back-projection imaging algorithms velten2012recovering ; Arellano17 or ellipsoid mode decomposition for multiple hidden objects jin2018reconstruction . Alternative methods aimed at simplifying or increasing the speed of LIDAR-like NLOS imaging rely on 2D continuous illumination klein2016tracking , deep learning caramazza2018neural and confocal illumination/collection o2018confocal . The multiple-bounce back-scattered signal is typically very weak so these techniques require high temporal resolution and high speed single-photon cameras with high detection efficiency.
However, one of the main limitations of current NLOS imaging systems is the finite temporal resolution of the detectors, which in turn determines the spatial resolution of the retrieval and thus the ability to reconstruct satisfactorily the 3D structure of the hidden scene. Furthermore the complete 3D retrieval of the hidden scene often requires prohibitive time resources with the 3D imaging of a moving object, although progress is being made to reduce the acquisition and reconstruction times o2018confocal ; goyal2019 , with the goal of reaching second or even sub-second times. Additionally, the spatial resolution of the retrieval can be improved by using iterative backprojection algorithms that however, typically require longer computational times la2018error ; kak2001algorithms .
Another rapidly evolving imaging technique is based on so-called single-pixel cameras padgett2019 . Standard 2D single-pixel imaging systems recover images by projecting an array of patterns onto the scene and detecting only the total reflected or transmitted light intensity, for which a single pixel is sufficient. The computational image reconstruction can then be achieved by computing a weighted sum of all the illumination patterns, where the weight of each pattern is given by the corresponding measured intensity level. This technique can also be extended for use e.g. in microscopy radwell2014single , imaging through scattering media tajahuerce2014image and terahertz imaging chan2008single or full 3D LIDAR gibson2017real ; sun2016single ; edgar2016real .
Although this technique requires many consecutive measurements, the consequent long acquisition time required for high spatial resolution images can be significantly reduced by applying compressive sensing duarte2008single ; satat2017lensless ; chan2008single . More importantly, the technique provides more flexibility in choosing the optimal (single pixel) detector for the imaging challenge being addressed. Of relevance to this work, this implies that one can choose a single pixel detector with enhanced temporal response and build upon the typically better temporal resolutions that are available in single pixel format (timing resolutions down to picoseconds), when compared to camera/SPAD array technologies.
In this work we demonstrate full 3D retrieval of hidden scenes by using a time-resolved single-pixel camera. The choice of a single pixel camera approach allows us to use optimised (sub 30 ps impulse response function) single photon detectors in combination with a digital mirror device (DMD) so as to remove the need for any scanning components whilst building upon the 20 kHz refresh rate of the DMD and high single photon sensitivity to reduce acquisition times with good reconstruction fidelity. By employing a white-light laser, we extend the technique to achieve the full RGB colour retrieval of non-cooperative, hidden objects and by choosing high efficiency single photon avalanche diodes (SPADs) we also achieve sub-second acquisition times.
Figure 1(a) shows the experimental set-up: the single-pixel camera is composed of a camera lens objective (8 mm focal length, f/3.5) that images a 50x50 cm2 portion of a scattering wall onto a DMD (placed 1.16 m from the wall). The DMD then projects only selected portions (masks) of the image onto a single-pixel single-photon detector through a microscope objective. The single-photon detector therefore acts as a bucket detector and has 30 ps impulse response time and an area of 57x57 m2. The DMD masks have 20x20 pixels corresponding to 2.6x2.6 cm2 pixel areas on the scattering wall. The single-photon data is recorded in time-correlated-single-photon-counting (TCSPC) mode triggered by the illumination laser, as a histogram of photon arrival times with 4096 time bins of 6.1 ps duration each. The laser is directed on the scattering wall 10 cm to the right of the field of view of the single-pixel camera, producing a first scattered spherical wave. Part of the spherical wave hits the hidden object which in turns scatters back into the field of view where it is captured by the time-resolved single-pixel camera. We then explored various imaging scenarios, testing different objects and DMD mask choices.
For the first scenario we investigated a hidden scene of two cooperative objects, i.e. a highly reflective, tin-foil 7.62 cm diameter cylinder and a 2.54 cm diameter mirror placed at different positions and distances from the wall [see Fig. 2(b)]. We used a 120 fs pulsed laser nm wavelength with a repetition rate of 80 MHz and an average power of 800 mW. We collect the third bounce echo with a simple raster scan acquisition on the DMD, one 2.6x2.6 cm2 imaging pixel at a time, and collect the reflected light onto a photomultiplier tube (PMT, hybrid photo detector HPM-100-07, Becker&Hickl, 4% efficiency at nm) with optimised temporal response (the measured total impulse response time was 27 ps FWHM). The acquisition time is set by the amount of the back scattered signal detected by the sensor. In this case the acquisition time is 10 seconds per mask (i.e. pixel) for a total acquisition time of 66 minutes. Figure 2(a) shows one time frame of the collected third bounce echos of the two hidden objects.
We proceed with the retrieval of the 3D shape of the hidden objects by applying the back-projection imaging algorithm first introduced by Velten et al. velten2012recovering ; la2018error . Although faster retrieval methods are available (see e.g. Arellano17 ), our primary focus here is on the hardware rather than on the retrieval software. Regarding the time-of-flight evaluation, we consider the moment the laser hits the wall as the zero time reference. We therefore divide the 3D space in voxels and we calculate the likelihood of the target to be localized on each voxel by using the time of flight the light takes to cover the distance where is the distance between the laser and the voxel and is the distance between the voxel and the pixel. The relation indicates that all the possible contributions to a given pixel lie on the surface of an ellipsoid whose foci are the laser spot and the pixel position. The ensemble of the 400 temporal histograms overlap at the scattering object position and thus encodes the 3D geometry of the hidden objects. We assign the likelihood of a voxel by summing the intensity of the pixels that could have received any contribution from the voxel. Following Ref. velten2012recovering , the final 3D shape of the object is improved by applying a Laplacian filter followed by a threshold selection on the data along the direction of the voxel grid.
Figures 2(c) and (d) show the results on the x-y plane and on the x-z plane, respectively. The dotted line in each figure indicates the actual positions of the targets. Our results show that this technique provides an accurate 3D shape recovering of the hidden (cooperative) targets, although with relatively long acquisition times.
We then investigate a hidden scene of non-cooperative objects with the same setup (Figure 3). In this case, the scene to be recovered is a red-green-blue (RGB) coloured object, placed outside the direct line-of-sight [Fig. 3(b)], where each coloured region has a rectangular shape of 20x9 cm2. In order to retrieve color information we use a supercontinuum laser (SuperK EXTREME/FIANIUM, NKT Photonics, repetition rate 67 MHz, pulse duration ps, average power 100 mW in the 450 nm - 700 nm spectral range). For the RGB retrieval we run a separate measurement for each of the three RGB colours, using a corresponding band-pass spectral filter centred at of 490, 550 and 610 nm (40 nm bandwidth) after the laser source with roughly 20 mW average power for each color. As above, the optimal acquisition time, due to the relatively low laser power, was found to be 10 seconds per mask for an overall acquisition time of 66 minutes. Figure 3(a) shows the three return signals scattered back by the three RGB coloured targets at a time frame of 8 ns. Figures 3(c) and (d) show the reflectivity on the x-y plane and on the x-z plane respectively: as can be seen, the retrieved 3D scene corresponds very closely to the ground truth (dashed lines).
The last scenario we investigate is a non-cooperative hidden object (a white paper rectangle of 24x10 cm2, see Fig. 1(b)) aimed at the optimising acquisition time. We achieve high speed acquisition by using a high efficiency (70 % peak efficiency at 550 nm) SPAD detector sanzaro2018single with a measured impulse response function of 30 ps FWHM. The SPAD has a square active area of 57x57 m2 and we use a 75 mm focal length lens and a long working distance objective (magnification factor 50) to focus the light after the DMD on to the sensor. The high sensitivity of the detector allows a shorter acquisition time of 1 millisecond per mask, which in this case where chosen as the first 400 Hadamard patterns with the goal of increasing the amount of collected light for each mask (50% of the pixels are always projected onto the detector for each mask). For each Hadamard pattern, one binary mask and its negative are used and combined, leading to a total of 800 patterns. This allowed the total acquisition time to be reduced to only 0.8 s. In this case we used the same supercontinuum laser of the previous scenario with a power of 550 mW at 550 nm.
As shown in Fig. 4(a) the collected third bounce echo of the signal is affected by low signal-to-noise ratio due to the short acquisition time. We therefore first apply a denoising algorithm similar to that used in caramazza2018enhancing thus returning the signal shown in Fig. 4(b). Precisely, a cost function is defined, accounting for the forward model (including observation noise assumed to be Poisson distributed) relating the image sequence (or video) reaching the DMD and the set of temporal sequences recorded for each Hadamard pattern. The cost function also includes two penalty terms to promote temporal and spatial smoothness after denoising. This is enforced by using a spatial total variation (TV) regularization, as well as a low-pass constraint on the Fourier transform of the temporal intensity profile of each pixel. This cost function is convex and the denoising step, i.e. the cost function minimization, is performed using an alternating direction method of multipliers (ADMM) algorithm Figueiredo2010 , as in Altmann2016 ; Tobin2018 . Figures 4(c) and (d) show the retrieved reflectivity of the hidden objects on the x-y plane and on the x-z plane respectively. Our results therefore show that this technique provides an accurate 3D shape of a hidden target even with sub-seconds acquisition times with an average number of only 1.2 photons/pixel in each time frame (with a maximum peak photon number of photons/pixel).
In conclusion, the high efficiency and the high temporal resolution of single-pixel single-photon detectors allow us to accurately recover the 3D shape of hidden objects even with low resolution masks of 20x20 pixels and no mechanical scanning parts.
The main limitation in the spatial resolution of the retrieval is due to the pixel size on the scattering wall. In our case, a pixel size of 2.6x2.6 cm2 limits the temporal resolution to 60 ps due to the blurring of the pulse wavefront as it crosses the 3.6 cm pixel collection area (taking the diagonal of the square pixel). This effecively corresponds to an uncertainty in the arrival time of the return pulse and, in analogy with standard LIDAR, will translate into an uncertainty of the object depth location that is 1/2 this value, i.e. 1.8 cm. This can be overcome by decreasing the pixel size however, at the cost of longer acquisition times due to the larger number of Hadamard patterns (or pixels to scan).
Overall, the ability to identify a hidden scene by the proposed approach is mainly determined by the time resolution of the detector and by the time required to acquire a significant back-scattered signal. The retrieval of hidden scenes still remains a challenging task due to long acquisition times, low spatial resolution of the retrieval and computational sources, although significant steps have been made recently, see e.g. Refs. o2018confocal ; goyal2019 . We have shown a NLOS ultra-fast imaging technology which can reliably recover the 3D shape in colour of a scene with high spatial resolution by using single-pixel, single-photon detectors with high temporal resolution. By using a high sensitivity detector, this system is able to retrieve the shape of the hidden target with an improved acquisition time of 0.8 seconds paving the way to real-time 3D shape recovery of hidden objects. The accurate 3D shape recovery of this system could be further improved by fully exploiting the benefits of using single-pixel camera for the acquisition. Indeed a future improvement in this method would be to decrease the acquisition times by using compressive sampling chen2018imaging . By combining compressive sensing and constant improvements of detection and computational resources, recovery of the 3D shape of hidden moving objects with high spatial resolution should be possible.
Acknowledgments. The authors acknowledge support from the Royal Academy of Engineering under the Research Fellowship scheme RF201617/16/31 and EPSRC, UK grant EP/M01326X/1.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1(1) D. Faccio and A. Velten. A trillion frames per second: the techniques and applications of light-in-flight photography. Reports on Progress in Physics , 2018.
- 2(2) A. Sume, M. Gustafsson, A. Jänis, S. Nilsson, J. Rahm, and A. Örbom. Radar detection of moving objects around corners. In Radar Sensor Technology XIII , volume 7308, page 73080 V. International Society for Optics and Photonics, 2009.
- 3(3) O. Katz, E. Small, and Y. Silberberg. Looking around corners and through thin turbid layers in real time with scattered incoherent light. Nature photonics , 6(8):549–553, 2012.
- 4(4) O. Katz, M. Heidmann, P.and Fink, and S. Gigan. Non-invasive single-shot imaging through scattering layers and around corners via speckle correlations. Nature photonics , 8(10):784, 2014.
- 5(5) Y. Altmann, S. Mc Laughlin, M. J. Padgett, V. K Goyal, A.O. Hero, and D. Faccio. Quantum-inspired computational imaging. Science , 361(6403):eaat 2298, 2018.
- 6(6) C. Saunders, J. Murray-Bruce, and V. K Goyal. Computational periscopy with an ordinary digital camera. Nature , 565(8):472?475, 2019.
- 7(7) U. Wandinger. Introduction to lidar in lidar-range-resolved optical remote sensing of the atmosphere. Springer, New York , 2005.
- 8(8) B. Schwarz. Lidar: Mapping the world in 3d. Nature Photonics , 4(7):429, 2010.