Rotational hypersurfaces of prescribed mean curvature
Antonio Bueno, Jose A. Galvez, Pablo Mira

TL;DR
This paper classifies rotational hypersurfaces in Euclidean space with prescribed mean curvature using phase space analysis, revealing a Delaunay-type classification for even prescribed functions and demonstrating richer behaviors than constant mean curvature cases.
Contribution
It introduces a phase space analysis approach to classify rotational hypersurfaces with prescribed mean curvature, extending Delaunay-type results and highlighting complex behaviors.
Findings
Delaunay-type classification for even prescribed functions
Existence of diverse hypersurface behaviors beyond constant mean curvature
Rich variety of rotational hypersurfaces with non-constant prescribed mean curvature
Abstract
We use a phase space analysis to give some classification results for rotational hypersurfaces in whose mean curvature is given as a prescribed function of its Gauss map. For the case where the prescribed function is an even function in , we show that a Delaunay-type classification holds for this class of hypersurfaces. We also exhibit examples showing that the behavior of rotational hypersurfaces of prescribed (non-constant) mean curvature is much richer than in the constant mean curvature case.
Click any figure to enlarge with its caption.
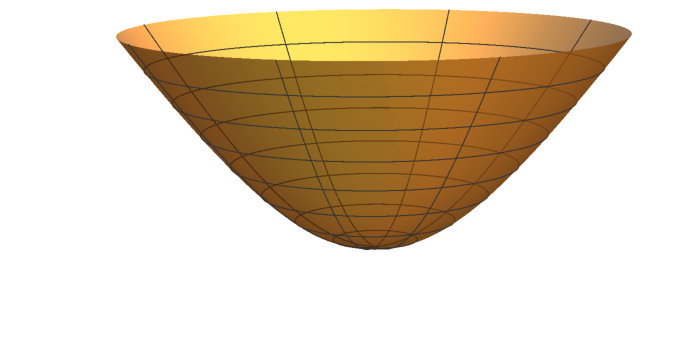 Figure 1
Figure 1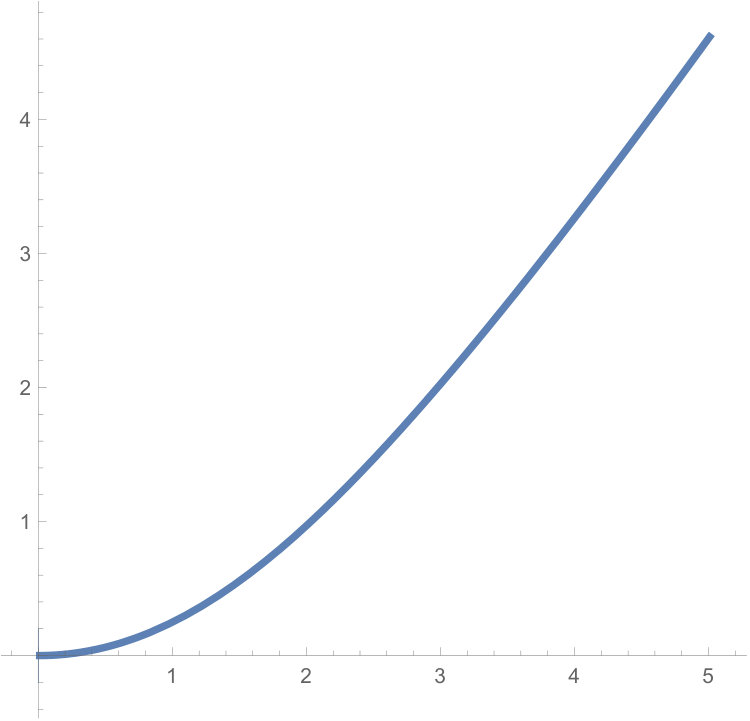 Figure 2
Figure 2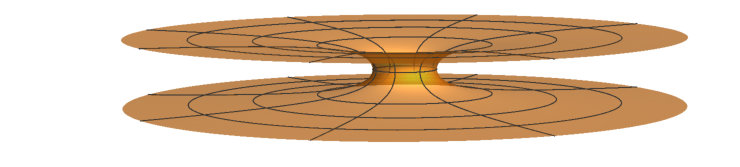 Figure 3
Figure 3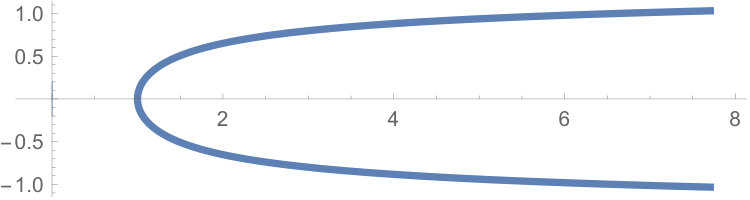 Figure 4
Figure 4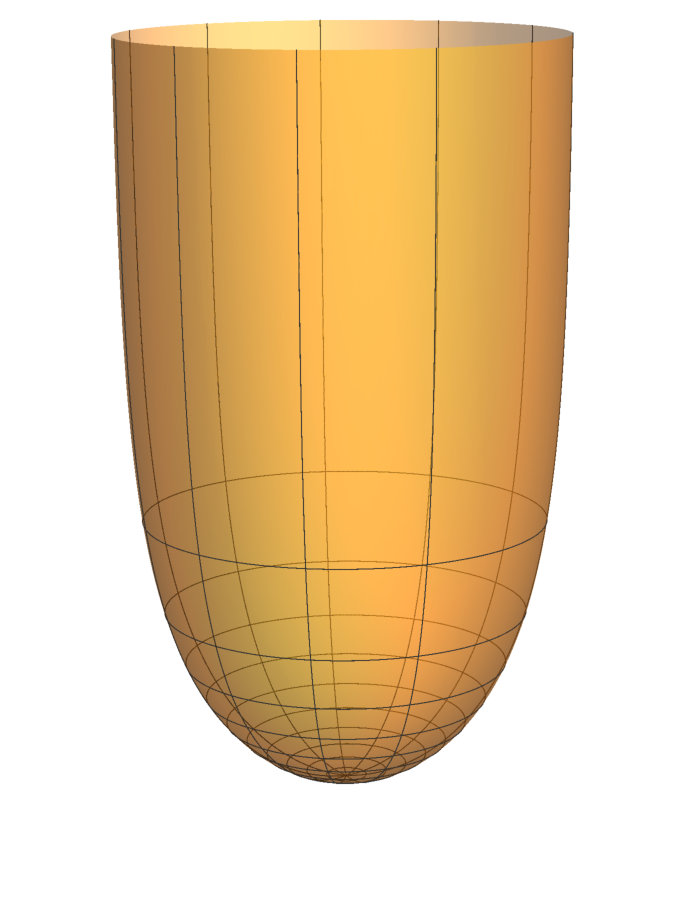 Figure 5
Figure 5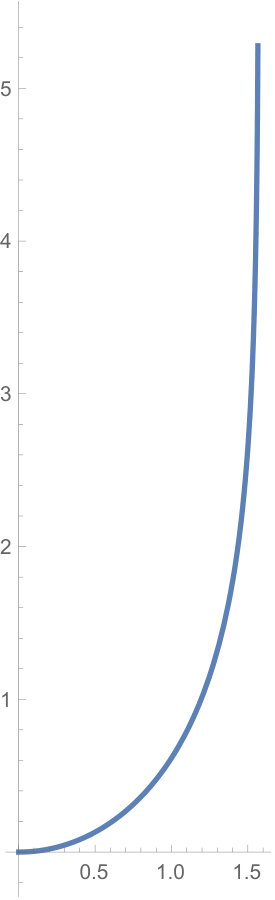 Figure 6
Figure 6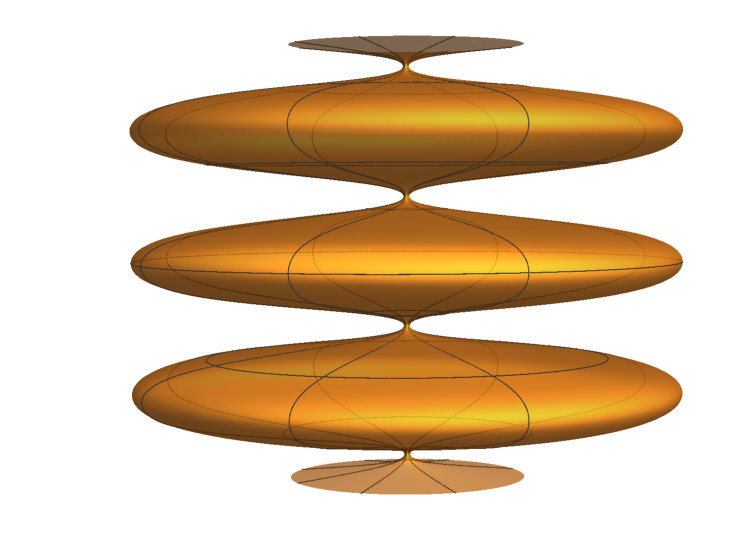 Figure 7
Figure 7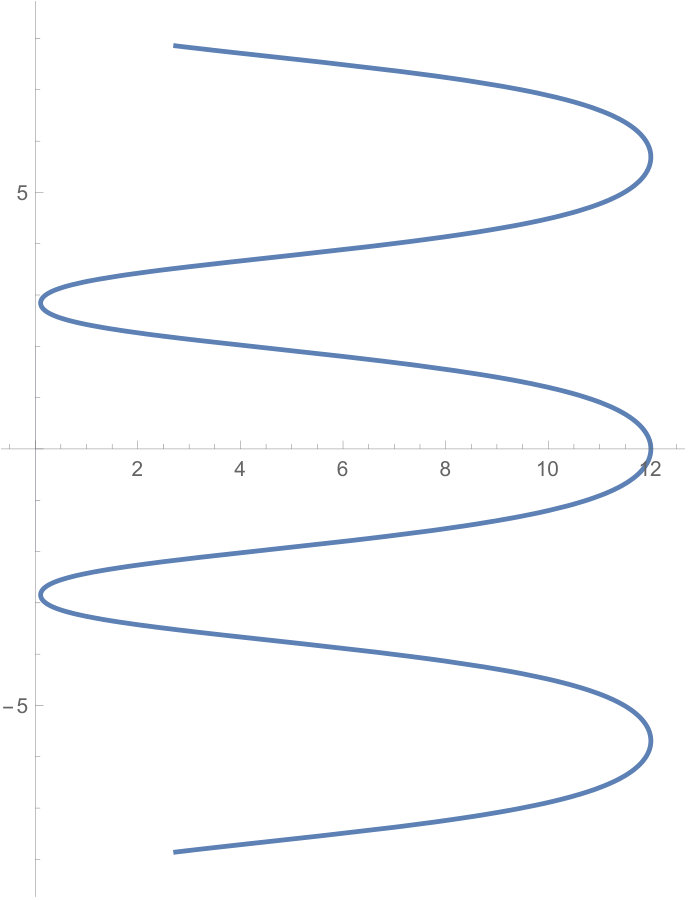 Figure 8
Figure 8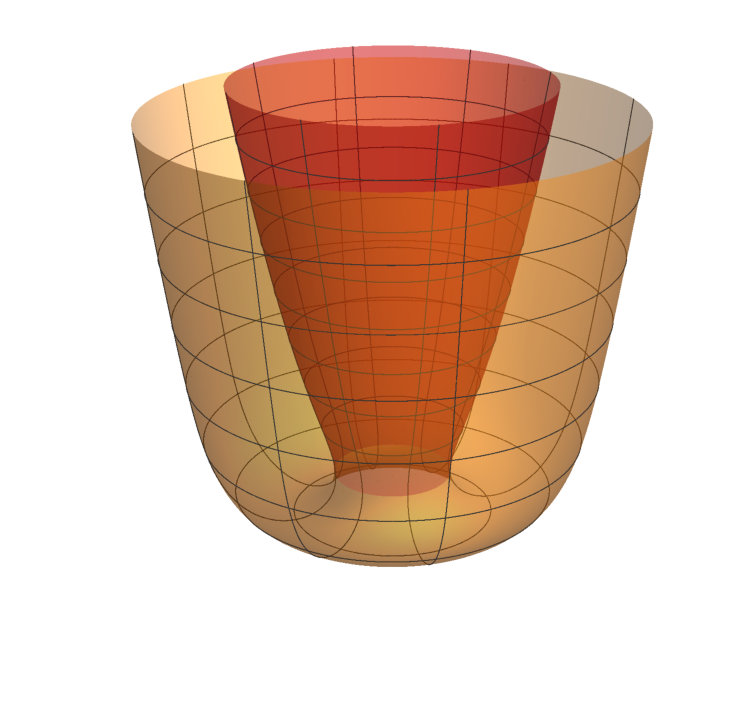 Figure 9
Figure 9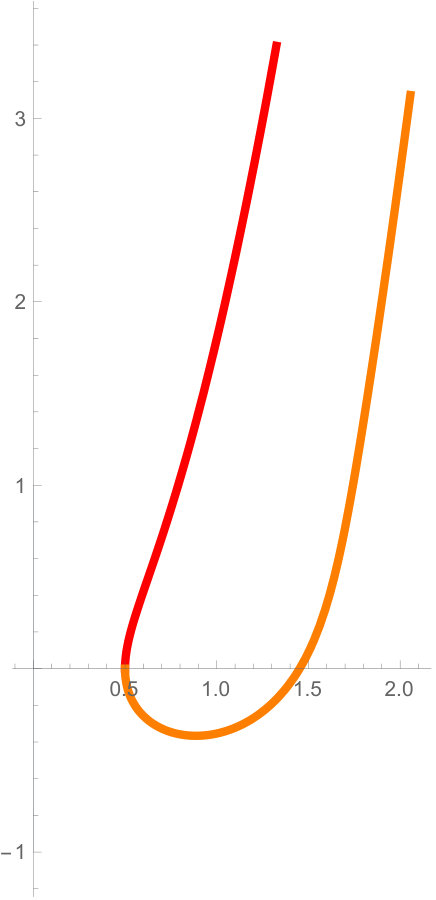 Figure 10
Figure 10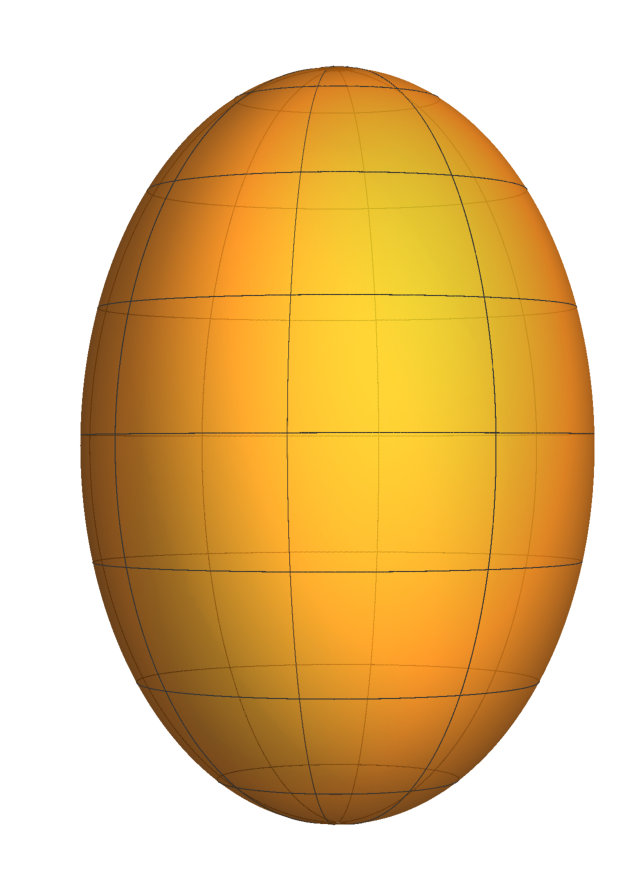 Figure 11
Figure 11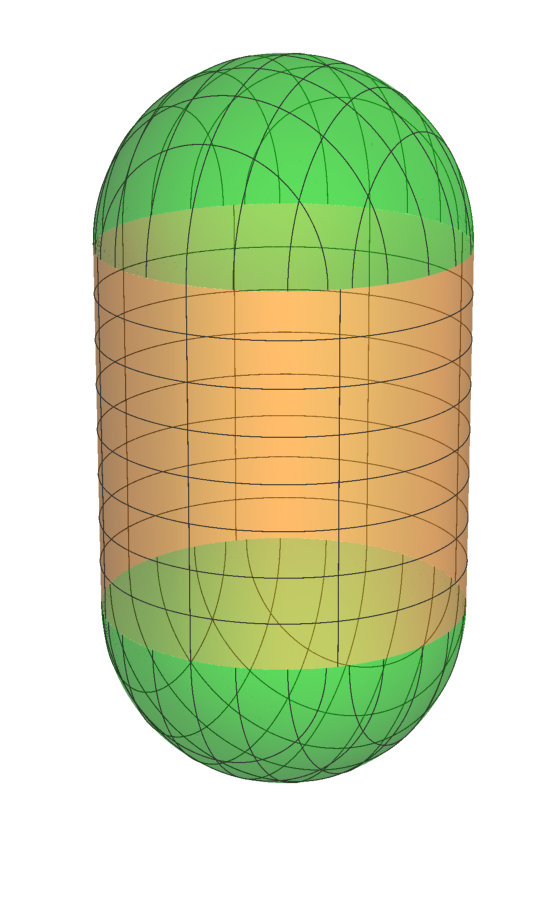 Figure 12
Figure 12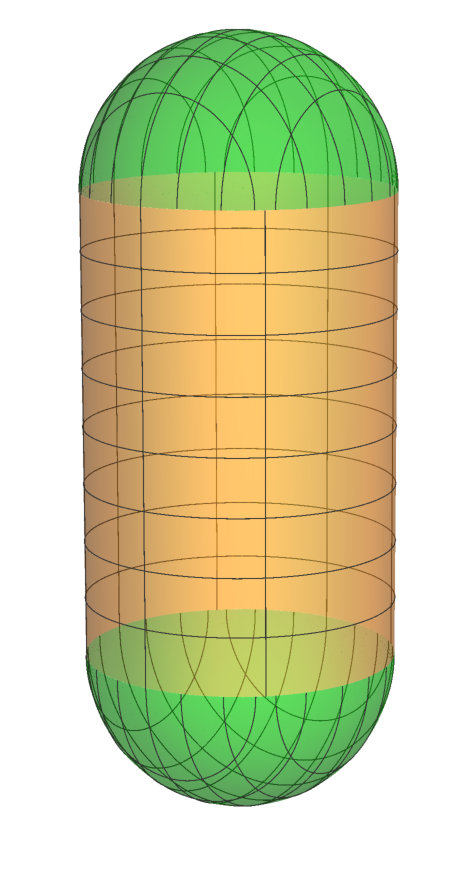 Figure 13
Figure 13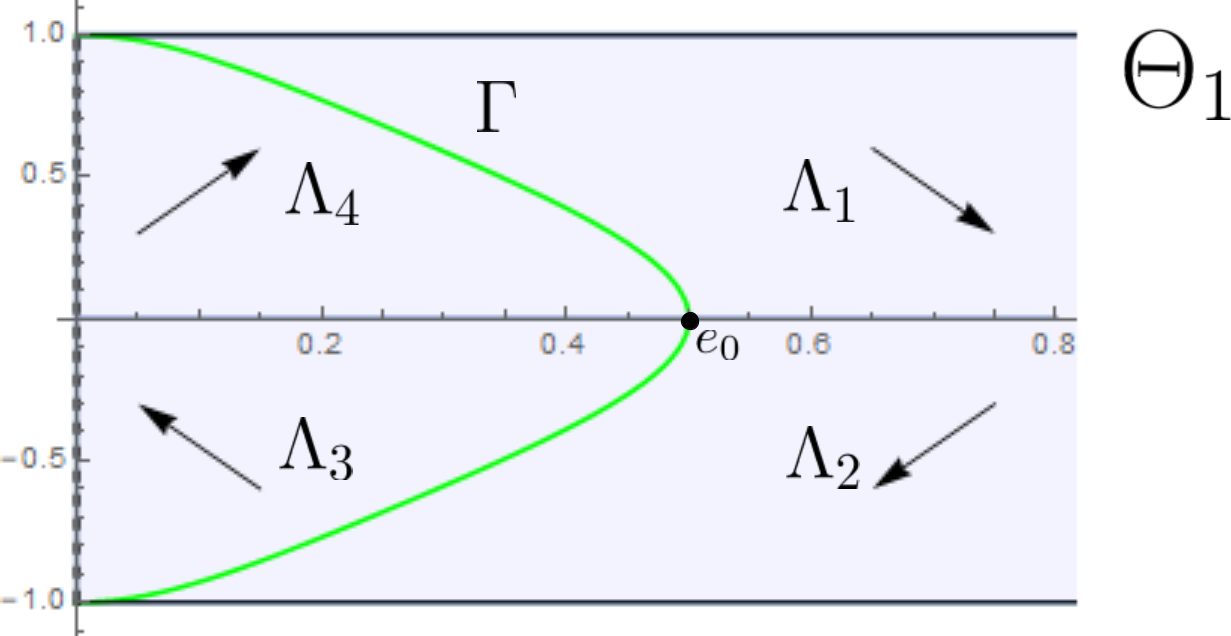 Figure 14
Figure 14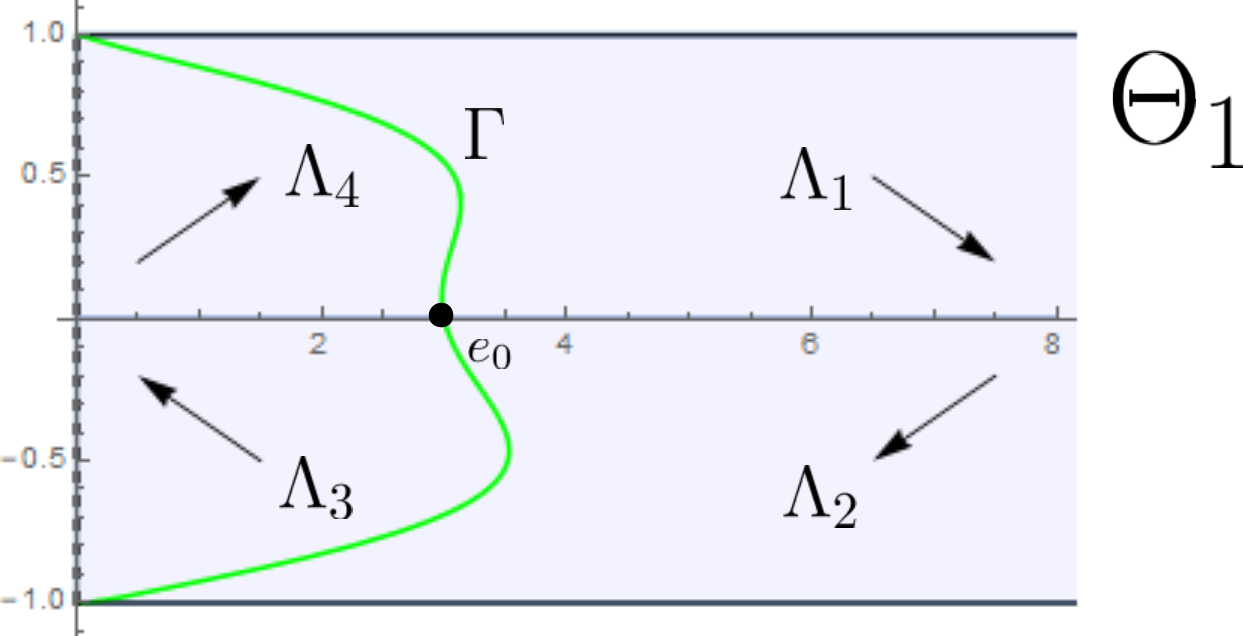 Figure 15
Figure 15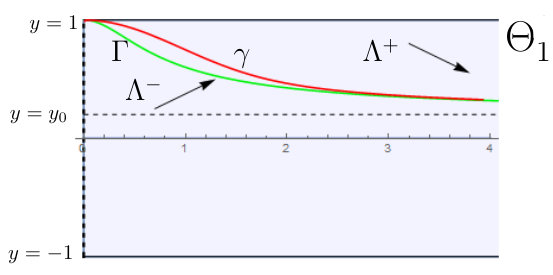 Figure 16
Figure 16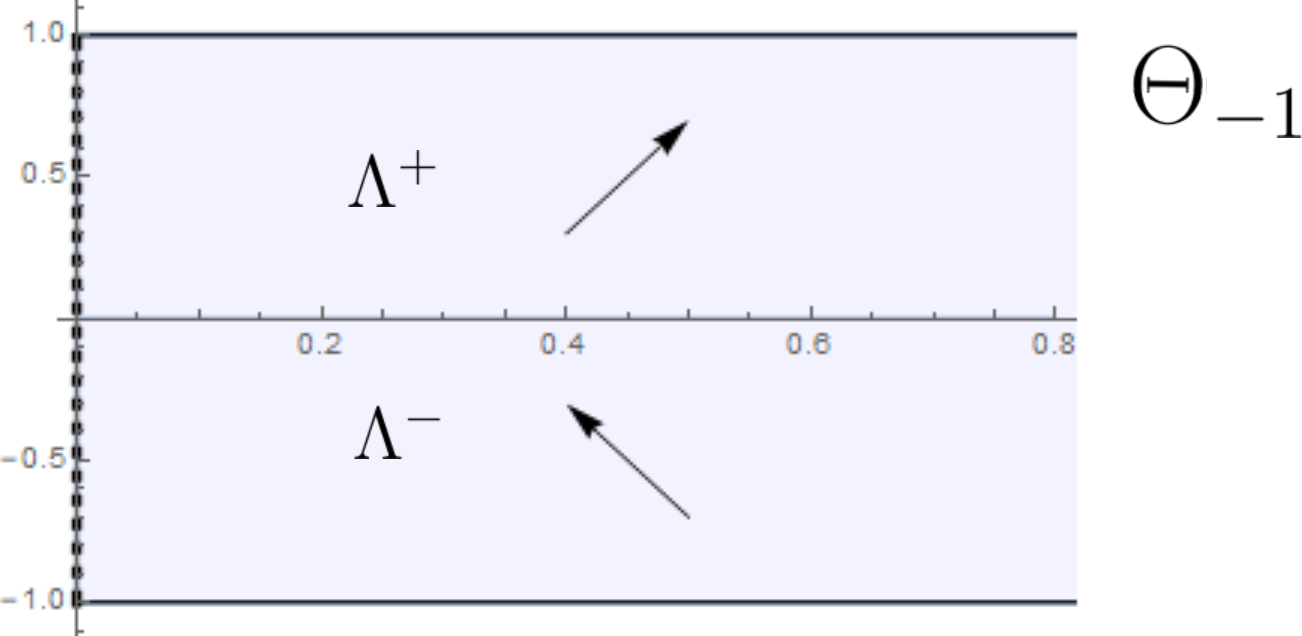 Figure 17
Figure 17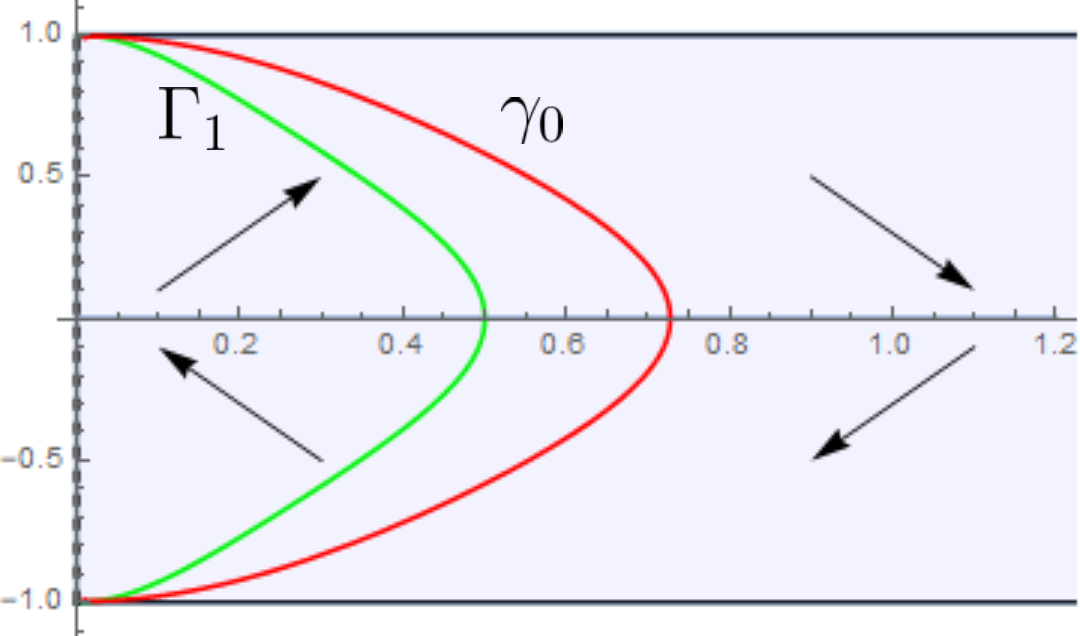 Figure 18
Figure 18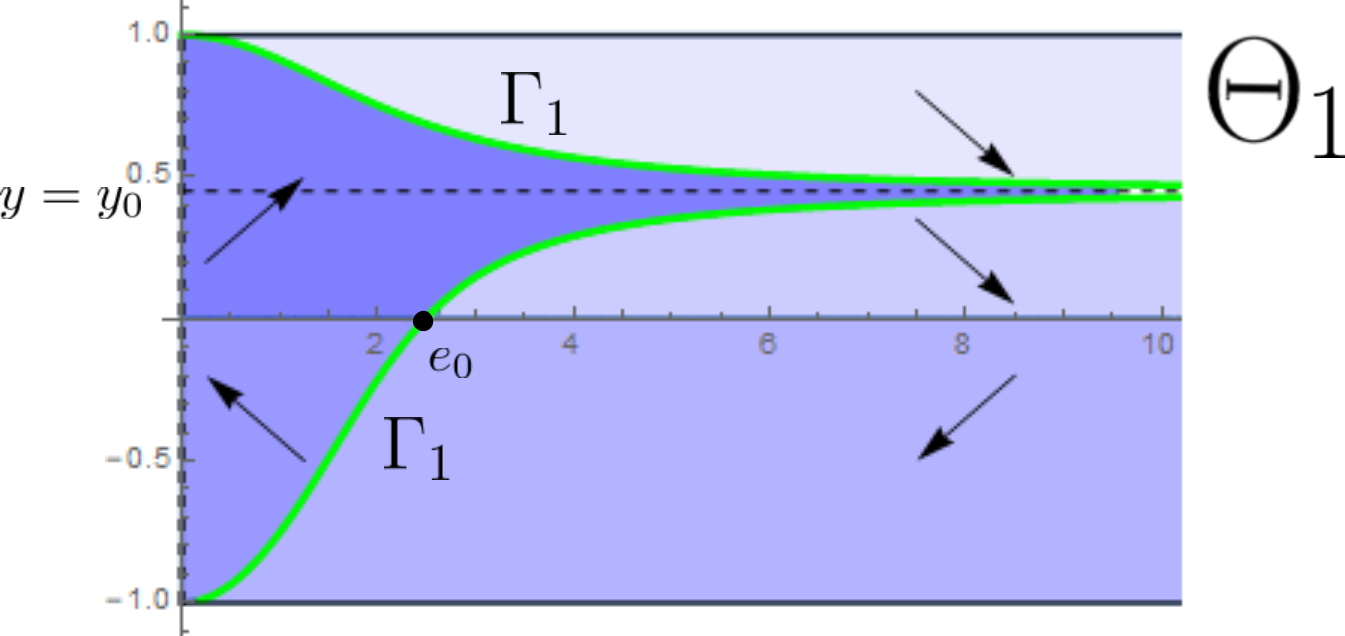 Figure 19
Figure 19 Figure 20
Figure 20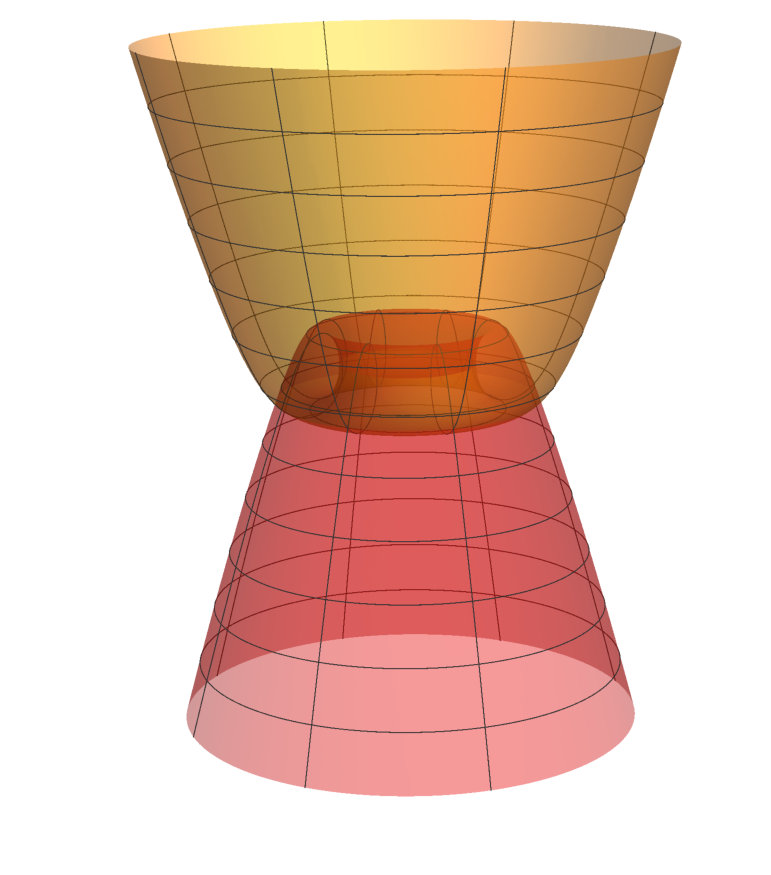 Figure 21
Figure 21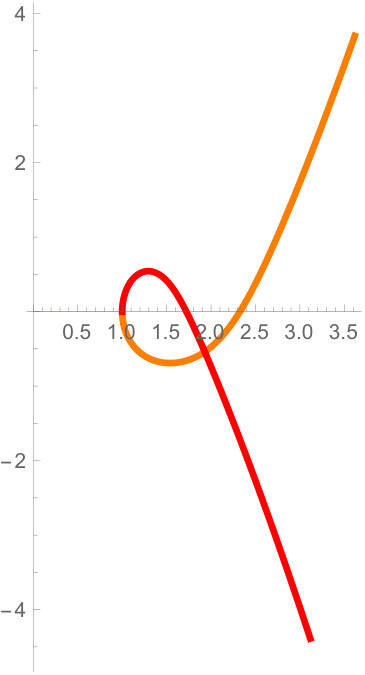 Figure 22
Figure 22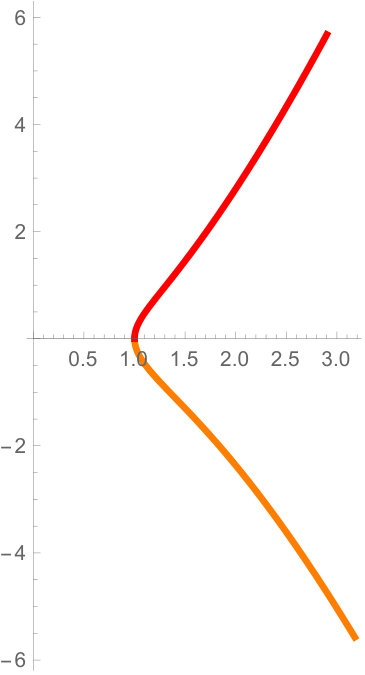 Figure 23
Figure 23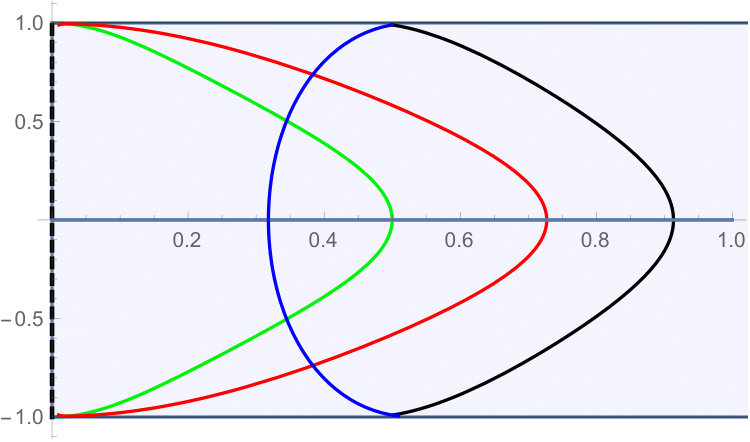 Figure 24
Figure 24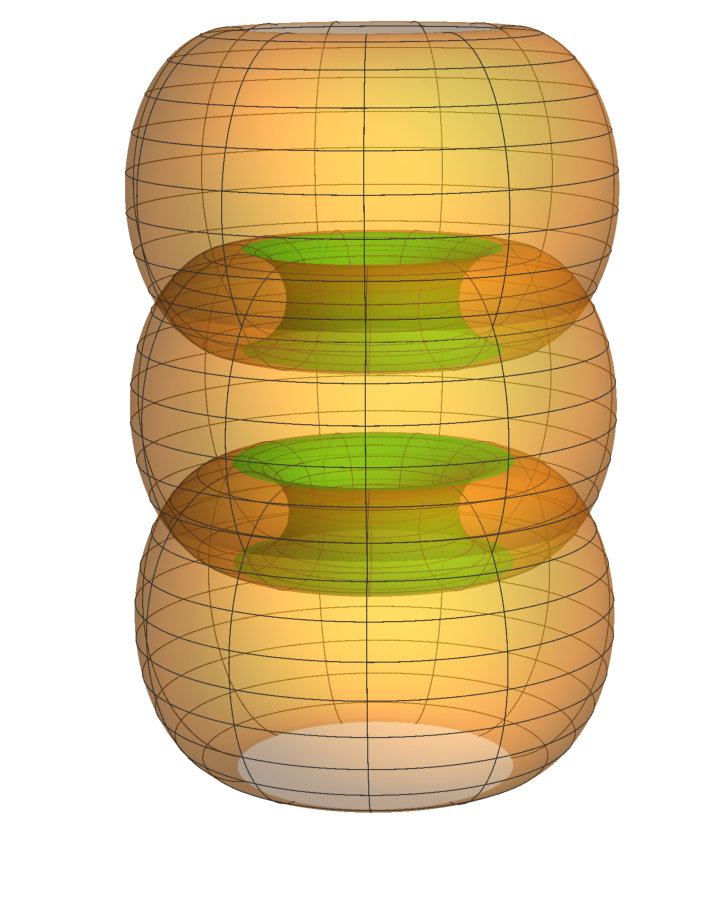 Figure 25
Figure 25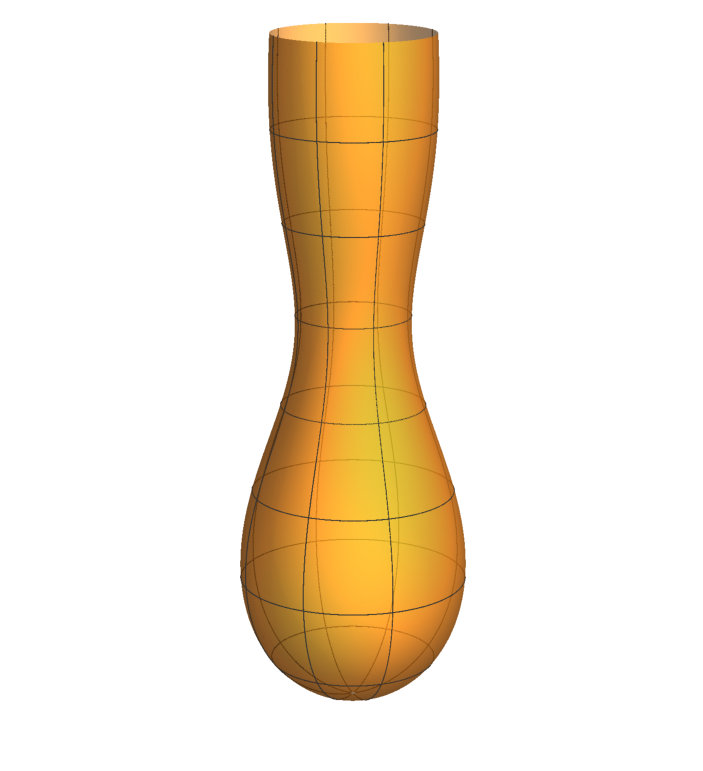 Figure 26
Figure 26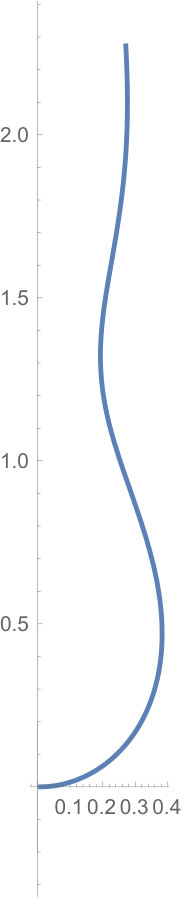 Figure 27
Figure 27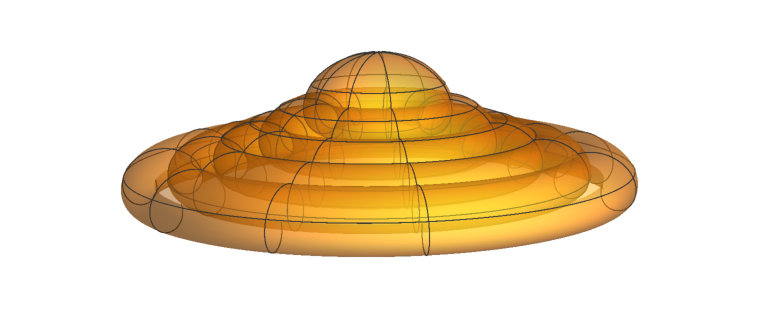 Figure 28
Figure 28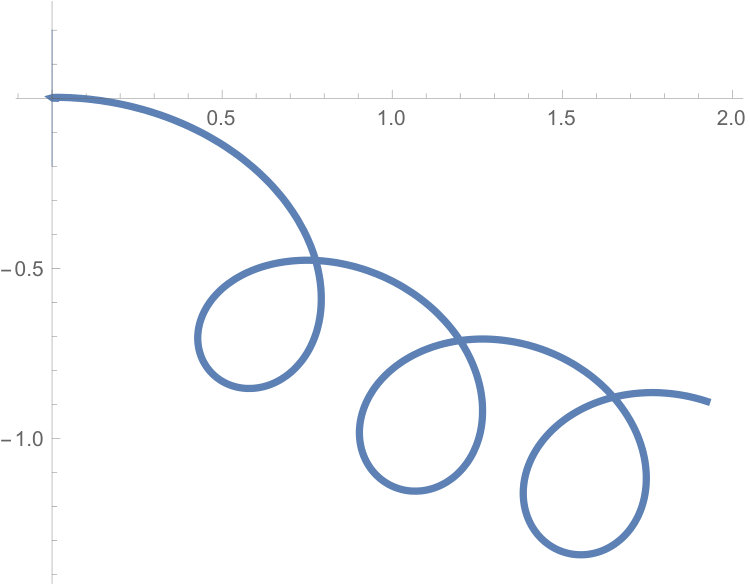 Figure 29
Figure 29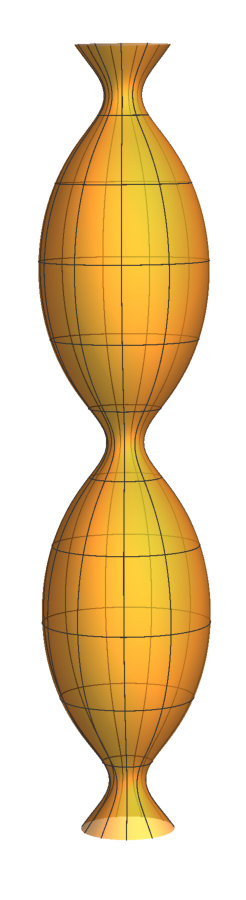 Figure 30
Figure 30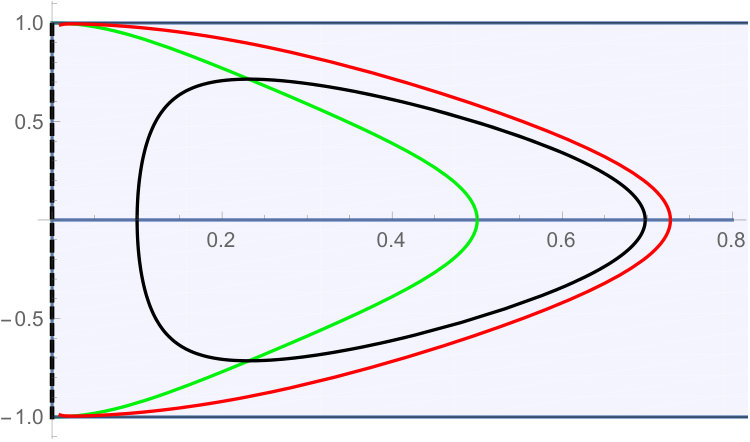 Figure 31
Figure 31Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
**Rotational hypersurfaces of prescribed
mean curvature
** Antonio Buenoa, José A. Gálvezb and Pablo Mirac
Departamento de Geometría y Topología, Universidad de Granada, E-18071 Granada, Spain.
e-mail: [email protected], [email protected]
Departamento de Matemática Aplicada y Estadística, Universidad Politécnica de Cartagena, E-30203 Cartagena, Murcia, Spain.
e-mail: [email protected] †† Mathematics Subject Classification: 53A10, 53C42, 34C05, 34C40
Abstract
We use a phase space analysis to give some classification results for rotational hypersurfaces in whose mean curvature is given as a prescribed function of its Gauss map. For the case where the prescribed function is an even function in , we show that a Delaunay-type classification holds for this class of hypersurfaces. We also exhibit examples showing that the behavior of rotational hypersurfaces of prescribed (non-constant) mean curvature is much richer than in the constant mean curvature case.
1 Introduction
In this paper we study the existence and classification of rotational hypersurfaces of the Euclidean space whose mean curvature is given as a prescribed function of its Gauss map . Specifically, given , we are interested in finding hypersurfaces that satisfy
[TABLE]
Following [BGM], any such will be called a hypersurface of prescribed mean curvature , or an -hypersurface, for short. When is given as a graph in canonical coordinates of , and we endow with its upwards orientation, i.e., the one for which , where , then (1.1) is written as the elliptic, second order quasilinear PDE
[TABLE]
where denote respectively the divergence and gradient operators on ; note that is the unit normal of the graph. A difficulty arising in the study of (1.2) is that, in contrast with the well-studied case in which the right-hand side in (1.2) depends only on , this equation does not have in general a variational structure.
The geometric study of -hypersurfaces is motivated by classical works of Alexandrov and Pogorelov in the 1950s (see [Al, Po]) about existence and uniqueness of ovaloids in defined by a prescribed curvature function in terms of its Gauss map. However, the global geometry of complete, non-compact -hypersurfaces in has not been studied in the literature for general choices of until recently. Indeed, the only well studied geometric theories in this regard are those of constant mean curvature hypersurfaces (corresponding to and of self-translating solitons of the mean curvature flow, which correspond to the choice for some .
In [BGM] the authors started the development of the global theory of complete -hypersurfaces, with a special emphasis on its relation with the case of constant mean curvature hypersurfaces. We showed there that, under mild symmetry and regularity assumptions on the function , the theory of -hypersurfaces sometimes admits a uniform treatment that resembles the constant mean curvature case.
Our goal in the present paper is to complement the theory developed in [BGM] with a study of the rotational -hypersurfaces in , in the case that the function is rotationally symmetric, i.e. for some . In such generality for , it seems hopeless to find an explicit description of such rotational -hypersurfaces, similar to the cases of CMC hypersurfaces, or of the self-translating solitons of the mean curvature flow. Thus, we will follow a different approach. We will treat the resulting ODE as a nonlinear autonomous system and we will carry out a qualitative study of its solutions through a phase space analysis. In this way, we will prove that, for some very general choices of , the geometry of these rotational -hypersurfaces resembles the classical constant mean curvature case. However, we will also show that in general there exists an immense variety of global geometric behaviors for general rotational -hypersurfaces. As a matter of fact, some of the examples that we construct here show that the hypotheses in some theoretical results in [BGM] are necessary.
We next explain the organization of the paper. In Section 2 we will develop the phase space analysis explained above, and use it to prove that any rotational -hypersurface in diffeomorphic to is strictly convex (Theorem 2.5). Let us remark that by a strictly convex hypersurface in we mean an oriented hypersurface in all of whose principal curvatures are different from zero and of the same sign. In particular, if is compact and strictly convex, then the Gauss map is a global diffeomorphism, and is the boundary of a strictly convex bounded set of ; we call then a strictly convex sphere.
When vanishes at some point, we will construct in Section 3, for very general choices of , a family of rotational -bowls (which are entire strictly convex graphs) and of -catenoids (which resemble the usual minimal catenoids in , and are diffeomorphic to ).
In Section 4 we will prove a classification theorem for rotational -hypersurfaces in , in the case that is positive, rotationally symmetric and even (i.e. for every ). In these general conditions, we will show in Theorem 4.1 that the geometry of such rotational -hypersurfaces follows the same pattern as the classical Delaunay classification of rotational hypersurfaces of non-zero constant mean curvature in . That is, all such examples are convex spheres, right circular cylinders, properly embedded hypersurfaces of unduloid type, or proper, non-embedded hypersurfaces of nodoid type.
In contrast with this classification theorem and the existence of bowls and catenoids, in Section 5 we will show that there exist many rotational -surfaces in which do not behave at all like CMC surfaces in . For instance, we will consruct complete, convex -graphs converging to a cylinder, or properly embedded disks asymptotically wiggling around a cylinder. We will also show examples with a wing-like shape, or with two strictly convex ends pointing in opposite directions. Many of these examples can also be constructed so that they self-intersect. All this variety, just for the very particular class of rotational -surfaces in , shows that the class of -hypersurfaces in is indeed very large, and rich in what refers to possible examples and geometric behaviors.
The phase space analysis developed in the present paper has motivated some studies in more general situations, see [B1, B2, B3, GM3]. Let us also remark that the study of rotational graphs for which the mean curvature is given as a prescribed function of (and not of its Gauss map) has received many contributions, in and other ambient spaces; see e.g. [BV, DRT, DG, L2, P] and references therein for just a few examples. See also [K, KN] for the case where the mean curvature is prescribed as a function of the profile curve of the rotational hypersurface.
Acknowledgements: This work is part of the PhD thesis of the first author.
2 Phase space analysis of rotational -hypersurfaces
In this section we will let be a rotationally symmetric function, i.e. for some and some function on . Up to an Euclidean change of coordinates, we will assume that , and so
[TABLE]
Thus, equation (1.1) for an immersed oriented hypersurface in yields
[TABLE]
where is the angle function of .
Let be an immersed, oriented, rotational hypersurface in , obtained as the orbit of a regular planar curve parametrized by arc-length
[TABLE]
under the action of all orientation preserving linear isometries of that leave the -axis pointwise fixed. A parametrization for is
[TABLE]
By changing the orientation of the profile curve if necessary, the angle function of is given by . There are at most two different principal curvatures on , given by
[TABLE]
where denotes the geodesic curvature of the profile curve .
Let now be in the conditions stated at the beginning of this section, related by (2.1), and let be a rotational -hypersurface in . Thus, satisfies (2.2). So, from (2.3), the profile curve of satisfies
[TABLE]
Noting that , we obtain from (2.4) that is a solution to the autonomous second order ODE
[TABLE]
on every subinterval where for all .
Denoting , (2.5) transforms into the first order autonomous system
[TABLE]
The phase space of (2.6) is , with coordinates denoting, respectively, the distance to the rotation axis and the angle function of . If , there is a unique equilibrium of (2.6) in , namely
[TABLE]
This equilibrium corresponds to the case where is a right circular cylinder in of constant mean curvature and vertical rulings. Otherwise, there are no equilibria in . The orbits provide then a foliation by regular proper curves of (or of , in case exists). It is important to observe that, since is , the uniqueness of the initial value problem for (2.6) implies that if an orbit converges to , the value of the parameter goes to .
The points in where are those placed at the intersection of with the (possibly disconnected) horizontal graph given for by
[TABLE]
Note that does not take a finite value at the zeros of , since is . We will denote . It must be remarked that might be empty; for instance, in the case and . A computation shows that the values where the profile curve of has zero geodesic curvature are those where , i.e., those where .
The curve and the axis divide into connected components where both and are monotonous. In particular, at each of these monotonicity regions, the profile curve has geodesic curvature of constant sign. Specifically, by (2.3) we have at each point , :
[TABLE]
Also, by viewing the orbits of (2.6) as graphs wherever possible (i.e. wherever ), we have
[TABLE]
Thus, in each of these monotonicity regions the sign of the quantity is constant. In particular, the behavior of the orbit of (2.6) passing through a given point is determined by the signs of and (wherever exists). We point out below some trivial particular consequences:
Lemma 2.1
In the above conditions, for any such that exists, the following properties hold:
*If (resp. ) and , then is strictly decreasing (resp. increasing) at . * 2. 2.
If (resp. ) and , then is strictly increasing (resp. decreasing) at . 3. 3.
If , then the orbit passing through is orthogonal to the axis. 4. 4.
If , then and has a local extremum at .
In order to describe further properties of orbits in the phase space , we turn our attention to the Dirichlet problem. Recall that if is an upwards-oriented graph of prescribed mean curvature , then satisfies (1.2). The next result follows from [Mar, Corollary 1], and gives general conditions for the existence of -graphs in .
Proposition 2.2
Let be a bounded domain and for some . Let , and assume that:
* where stands for the volume of the -dimensional unit ball.* 2. 2.
* for all , where is the inner pointing unit conormal of , viewed as a vector in , and is the mean curvature of the submanifold with respect to .*
Then, the Dirichlet problem
[TABLE]
has a unique solution .
A direct consequence from Proposition 2.2 is:
Lemma 2.3
Let be in the conditions stated at the beginning of the section, and . Then, there exists a unique (up to vertical translations) -hypersurface in that is rotational with respect to the the -axis, and that meets this rotation axis orthogonally at some point , with unit normal at given by the vertical unit vector .
- Proof:
By Proposition 2.2, we can solve the Dirichlet problem (2.11) for the equation of upwards-oriented -graphs in , on a sufficiently small ball , with constant Dirichlet data on the boundary. Since is rotationally invariant, the graph of the solution is a rotational -hypersurface in with unit normal at the origin. Since the equation in (2.11) is invariant by additive constants, the uniqueness of in these conditions is immediate from the maximum principle. The same argument can be done for downwards-oriented -graphs in , what completes the proof of Lemma 2.3.
Lemma 2.3 has the following consequence for our analysis of the phase space .
Corollary 2.4
Assume that for some , and let such that . Then, there exists a unique orbit in that has as an endpoint. There is no such an orbit in .
- Proof:
Let be the rotational -hypersurface given for by Lemma 2.3 (the relation between and is given by (2.1)). Let be the profile curve of , defined for or depending on the orientation chosen on , and assume that , i.e. corresponds to the point of orthogonal intersection of with its rotation axis. Since is an umbilical point of , all principal curvatures of at are equal and of the same sign as .
By (2.3), the geodesic curvature of at is non-zero, and thus the sign of , which will as usual be denoted by , is constant for small enough. It follows then again by (2.3) that . Consequently, the profile curve generates an orbit in the phase space with as an endpoint. Uniqueness of this orbit follows from the uniqueness in Lemma 2.3. It is also clear from the argument that such an orbit cannot exist in , because of the condition .
The previous corollary can be used to describe geometrically the compact, rotational -hypersurfaces immersed in that are diffeomorphic to .
Theorem 2.5
Let be an immersed, rotational -hypersurface in diffeomorphic to , for rotationally symmetric. Then is a strictly convex sphere.
- Proof:
By Proposition 2.6 in [BGM], the existence of a compact -hypersurface for some implies that never vanishes. Thus, up to a change of orientation, we can assume that in our situation.
Let be the profile curve of , and let be given by (2.1). Since by the previous argument, the curve where is given by (2.8) does not exist for , and for , is a compact connected arc with endpoints and . Hence, we have four monotonicity regions inside , with monotonicities given by Lemma 2.1, and an equilibrium ; see Figure 2.2.
By Corollary 2.4, there exists an orbit in the phase space that has as an endpoint; it corresponds to an open subset of that contains a point of with unit normal , at which meets its rotation axis orthogonally. By the monotonicity properties of the regions , the curve lies in the region for all points near . By the regularity and compactness of , the curve cannot approach any point of the form with . Indeed, if had such an endpoint, would be asymptotic to its rotation axis (this corresponds to ), or it would present a non-removable isolated singularity around some point touching its rotation axis (), and these situations cannot happen. Also, it cannot happen that converges asymptotically to the equilibrium , since in that case, as explained after (2.7), the parameter would converge to , and this contradicts the compactness of . Since cannot self-intersect, it becomes then clear from the monotonocity properties of the phase space that there are only two possible behaviors for :
- i)
If intersects at some point in , then enters at some moment in the region (and hence, afterwards it also enters in ), and so it has to converge asymptotically to the equilibrium of , which is not possible, as explained above. 2. ii)
Otherwise, stays in , and it is a graph of the form , with for some . Again by compactness of , we must have . Thus, can be extended to be a compact graph for , and it has a second endpoint at some with .
Next, we can repeat all the argument above, and obtain a second orbit in , that has as an endpoint, and which corresponds to a piece of where it intersects its rotation axis with unit normal . We conclude that can be extended to be a graph for , with a second endpoint at some with . Since and cannot intersect on , the only possibility is that or . Thus, by the uniqueness property of Corollary 2.4, we have , which is then an orbit in joining with .
By (2.6), and since stays in the region , it follows that for all . Consequently, by (2.9) we see that all principal curvatures of are positive at every point, and so is a strictly convex sphere in .
Theorem 2.5 does not hold if the function is merely assumed to be in . Indeed, let be a smooth strictly convex radial graph in over a closed ball of a certain radius , with Let be obtained from by a symmetry with respect to the hyperplane and a translation of vector , , and let denote the compact (with boundary) vertical cylinder in . Assume that defines a smooth rotational hypersurface in . Then, it is easy to see that if two points have the Gauss map image in , they also have the same mean curvature at those points. That is, satisfies equation (1.1) for some rotationally symmetric . Clearly, is a rotational -hypersurface that bounds a convex set of , but that is not strictly convex, see Figure 2.3.
3 -bowls and -catenoids in
In this section we show examples of properly embedded rotational -hypersurfaces in , for very general choices of the radially symmetric function . As before, we let be given in terms of by (2.1). First, we will construct examples of entire, strictly convex, -graphs. In analogy with the theory of self-translating solitons of the mean curvature flow, we will call them -bowls.
Proposition 3.1
Let be given by (2.1) in terms of , and suppose that there exists (resp. ) such that . Then there exists an upwards-oriented (resp. downwards-oriented) entire rotational -graph in . Moreover, is either a horizontal hyperplane, or a strictly convex graph.
- Proof:
If (resp. ), can be chosen to be an upwards-oriented (resp. downwards-oriented) horizontal hyperplane in , and the result is trivial.
Consider next the case that , and let be the largest value of such that . Since on and , the horizontal graph defined by (2.8) has a connected component given by the restriction of to the interval , and satisfies and .
Define now by , and let and . These components and are the only connected components of , and they have as their common boundary. Moreover, are monotonicity regions of , and by Lemma 2.1 each orbit in (resp. ) satisfies that (resp. ); see Figure 3.1.
Let now be the upwards-oriented rotational -graph in constructed in Lemma 2.3, and let denote the orbit in associated to the profile curve of , which has an endpoint at ; see Corollary 2.4. By the monotonicity properties explained above, lies in for points near . By the same monotonicity properties, and using item 4 of Lemma 2.1, we can conclude that is globally contained in . Thus, by its monotonocity and properness, can be seen as a graph , where satisfies , and for all .
This implies that is an entire rotational graph in . Since is totally contained in for , we have by (2.9) that the principal curvatures of are everywhere positive. Moreover, since does not leave the monotonicity region , we conclude from (2.6) and (2.9) that is also everywhere positive. Thus, is a strictly convex entire graph.
This concludes the proof in the case that and . A similar argument works in the case that and . The remaining two cases, namely , and , , are reduced to the previous ones by a change of orientation. This completes the proof of Proposition 3.1.
The next result shows that there exist catenoid-type rotational -hypersurfaces for a large class of rotationally invariant choices of .
Proposition 3.2
Let , , be given by (2.1) in terms of , and suppose that . Then, there exists a one-parameter family of properly embedded rotational -hypersurfaces in of strictly negative Gauss-Kronecker curvature at every point, and diffeomorphic to . Each of them is a bi-graph over , where , for some .
- Proof:
Let be the rotational -hypersurface in generated by a unit speed curve that satisfies the initial conditions , and for some ; i.e. corresponds (up to a vertical translation) to the unique solution of (2.6) with initial conditions , . Then, the orbit of (2.6) associated to passes through and belongs to the phase space around that point; i.e. in (2.6).
Observe that, since , the curve with given by (2.8) does not exist (i.e. is empty). Thus, there are two monotony regions in , given by and . Any orbit in (resp. ) satisfies that (resp. ). We should also note that, by the condition , and since , no orbit in can have a limit point of the form for some , since this would contradict uniqueness of the solution to the Cauchy problem for (2.6); observe for this that is a solution to (2.6), and that as with , the right-hand side of (2.6) is along .
Taking these properties into account, it is easy to deduce that the orbit is given as a horizontal graph for some with , and so that , (resp. ) for all (resp. for all ), and as . As a matter of fact, using (2.10), it is easy to show that this is possible in our conditions only if , . Thus, is a bi-graph in over , with the topology of . That is, where both are graphs over with , and meets the hyperplane orthogonally along .
By (2.6) we get for all . So, by (2.9), we have that at every the relations and hold. In particular, the Gauss-Kronecker curvature of is negative at every point. This completes the proof.
We remark that these examples resemble indeed the usual catenoids in minimal hypersurface theory, and that Proposition 3.2 recovers them for the choice . However, while minimal catenoids can be given an explicit parametrization, this is not the case for the -catenoids constructed in Proposition 3.2. Moreover, these -catenoids can have different asymptotic behaviors, i.e. different growths at infinity, depending on the choice of the prescribed mean curvature function . Understanding this asymptotic behavior can lead to proving half-space theorems for properly immersed -hypersurfaces in for some rather general choices of rotationally symmetric functions , by using the classical ideas of Hoffman and Meeks in [HM] about properly immersed minimal surfaces in . See e.g. [B3] for some results in this direction.
4 Classification: a Delaunay-type theorem
Given , a classical theorem by Delaunay shows that there are exactly four types of rotational hypersurfaces in with constant mean curvature , up to isometry: round spheres , right circular cylinders of radius , a one-parameter family of properly embedded unduloids, and a one-parameter family of non-embedded nodoids. Both unduloids and nodoids are invariant under the discrete -group generated by some vertical translation in .
In this section we will extend Delaunay’s classification, and show that a similar description holds for rotational -hypersurfaces in , in the case that is positive, rotationally invariant and even, i.e for all . In terms of the function associated to by (2.2), this means that for all .
We should point out that, in contrast with the classical CMC case, for a prescribed function in the conditions above, the Delaunay hypersurfaces with prescribed cannot be given a general explicit description by integral formulas. We should also point out that this Delaunay-type classification is not true anymore if the prescribed mean curvature is not an even function on . In Section 5 we will provide examples that support this claim.
Theorem 4.1
Let be given by (2.1) in terms of , and suppose that for all . Then, the following list exhausts, up to vertical translations, all existing rotational -hypersurfaces in around the -axis:
The right circular cylinder , where . 2. 2.
A strictly convex rotational -sphere . 3. 3.
A one-parameter family of properly embedded -unduloids, . 4. 4.
A one-parameter family of properly immersed, non-embeded, -nodoids, .
Moreover, any -unduloid or -nodoid is invariant by a vertical translation in , diffeomorphic to , and lies in a tubular neighborhood of the -axis in . The Gauss map image of each -unduloid omits open neighborhoods of the north and south poles in . The Gauss map image of each -nodoid is .
- Proof:
Let be any solution to (2.6). Since , it follows that is also a solution to (2.6). Geometrically, this means that any orbit of the phase space , , is symmetric with respect to the axis. The curve in given by (2.8) together with divides the phase space into four monotonicity regions , all of them meeting at the equilibrium in (2.7). The curve in does not exist, and so has only two monotony regions: and . See Figure 4.1.
Let us prove next that no orbit in or can have a limit point of the form , . Indeed, assume that such an orbit exists, and let denote the profile curve of its corresponding rotational -hypersurface . Then, for a sequence of values , and in particular approaches the rotation axis in a non-orthogonal way (since ). So, by the monotonicity properties of the phase space, we see that a piece of is a graph on a punctured ball in . Moreover, the mean curvature function of , viewed as a function on , extends continuously to the puncture, with value . Hence, it is known that the graph extends smoothly to the ball , see e.g. [LRo]. In particular, the unit normal at the puncture is vertical. This is a contradiction with .
The description of the orbits in follows then easily from the fact above, and the previous monotonicity properties. Any such orbit is given by a horizontal graph , with for every for some , and such that restricted to is strictly increasing. In the case that as for some orbit, the rotational -hypersurface in described by that orbit would be a symmetric bi-graph over the exterior of an open ball in . This is impossible, since for some ; indeed, it is well known that there do not exist graphs in over the exterior of a ball, with mean curvature bounded from below by a positive constant. Hence, and any orbit in has two limit endpoints of the form for some . The resulting -hypersurface in associated to any such orbit is then a compact (with boundary) symmetric bi-graph over some domain of the form , and its boundary is given by
[TABLE]
for some . The -coordinate of the profile curve of is strictly decreasing, and the unit normal to along (resp. along ) is constant, and equal to (resp. to ).
We describe next the orbits in together with their associated -hypersurfaces. First, observe that the equilibrium , given by (2.7), corresponds to the cylinder .
Let us analyze the structure of the orbits of around . Noting that by symmetry, we can check that the linearized system at associated to the nonlinear system (2.6) for is
[TABLE]
whose orbits are ellipses around the origin. By classical theory of nonlinear autonomous systems, this means that there are two possible configurations for the space of orbits of (2.6) near ; either all such orbits are closed curves (a center structure), or they spiral around . However, this second possibility cannot happen, since all orbits of (2.6) are symmetric with respect to the axis , and lies in this axis. In particular, we deduce that *all orbits of stay at a positive distance from the equilibrium . *
Next, observe that by Corollary 2.4 there exists an orbit in the phase space that has as a limit point. Note that lies near inside the monotonicity region , and it cannot stay forever in that region, by an argument as the one above using that . Moreover, stays at a positive distance from , by the previous discussion, and it does not intersect . Thus, must intersect the axis at some point , with . By symmetry of the phase space, we deduce that can be extended to be an orbit in that joins the limit points and , and that lies in the region ; see Figure 4.2. It is clear that the rotational -hypersurface associated to the orbit is a strictly convex -sphere (see Theorem 2.5).
Also, observe that divides into two connected components: the one containing the equilibrium , which we will denote by , and the one where is unbounded, which will be denoted by . Any orbit of other than lies entirely in one of these two open sets.
By symmetry and monotonicity, and the fact that is the unique orbit in with an endpoint of the form , it is clear that any orbit in is a symmetric horizontal graph , with for some , and such that is strictly increasing (resp. decreasing) in (resp. in ). Let denote the rotational -hypersurface in associated to any such orbit in , and let be its profile curve. Note that since . By similar arguments to the ones used for , we conclude that is a compact (with boundary) symmetric bi-graph in over some domain in of the form , and
[TABLE]
for some . The unit normal to along (resp. along ) is (resp. ).
Consequently, by uniqueness of the solution to the Cauchy problem for rotational -hypersurfaces in , we can deduce that, given , the -hypersurfaces and that we have constructed associated to can be smoothly glued together along any of their boundary components where their unit normals coincide, to form a larger -hypersurface. For this, we should note that both and are defined up to vertical translations in , and so we can assume without loss of generality in the previous construction that or that (and hence and have the same Cauchy data). There are two cases to consider.
If we have simultaneously and , the hypersurface obtained by gluing with is a compact rotational -hypersurface diffeomorphic to . But now, note that since is rotationally symmetric, in particular, it is invariant with respect to linearly independent geodesic reflections of . In these conditions, Proposition 2.8 in [BGM] establishes that the hypersurface must be diffeomophic to , and this contradicts the previous information on its topology.
Consequently, we have and , or and . In that way, by iterating the previous process we obtain a proper, non-embedded rotational -hypersurface in diffeomorphic to , invariant by a vertical translation. This proves the existence of the family of -nodoids in .
To end the proof of Theorem 4.1, we consider an orbit of that is contained in the region . Recall that we proved previously that stays at a positive distance from the equilibrium . Also, recall that we showed at the beginning of the proof that cannot approach a point of the form with . So, as is symmetric with respect to the axis, if we take into account the monotonocity properties of , we deduce that is a closed curve containing in its inner region. This implies that the profile curve of the rotational -hypersurface associated to any such orbit satisfies that is defined for all real values, that for all , and that is periodic. These properties imply that is an -unduloid, with all the properties listed in the statement of the theorem (see Figure 4.4). This concludes the proof.
It is interesting to remark that the family of -unduloids for a given in the conditions of Theorem 4.1 is a continuous -parameter family. Similarly to what happens in the CMC case, at one extreme of the parameter domain we have a (singular) vertical chain of tangent rotational -spheres , and at the other extreme we have the -cylinder .
It is also important to stress that the ideas in the proof of Theorem 4.1 can be used to classify the rotational -hypersurfaces in for other types of rotationally symmetric choices of .
For instance, assume that is rotationally symmetric, and its associated function satisfies that for every , and . In that case it can be shown using the previous ideas (although details will be skipped here) that there are exactly four types of rotational -hypersurfaces in with axis : horizontal hyperplanes, cylinders of the form , -catenoids of non-vanishing mean curvature like the ones of Proposition 3.2 (with opposite orientation), and hypersurfaces of -unduloid type similar to those of Theorem 4.1. Interestingly, in this situation the family of -unduloids varies between the cylinder and a singular family of double covers of horizontal hyperplanes joined along the -axis. See Figure 4.5.
We give next an application of Theorem 4.1. Let us recall that constant mean curvature spheres in are described by a classical theorem of H. Hopf: any surface of constant mean curvature surface immersed in and diffeomorphic to is a sphere of radius . In [GM1, GM2, GM3] the last two authors proved several extensions of Hopf’s theorem to very general geometric situations. In the context of -surfaces in , their result can be phrased as follows:
Theorem 4.2** ([GM1, GM2])**
Let , and assume that there exists a strictly convex -sphere in . Then any -surface immersed in diffeomorphic to is a translation of .
So, as a direct application of Theorems 4.1 and 4.2, and since there are no compact -hypersurfaces in if vanishes somewhere (see [BGM, Proposition 2.6]), we have:
Corollary 4.3
Let be even (i.e. ) and rotationally symmetric, and let be an immersed -surface in diffeomorphic to . Then, is the rotational, strictly convex -sphere given by Theorem 4.1.
5 Examples with no CMC counterpart
The results in Sections 3 and 4 show, in particular, the existence of the following types of rotational -hypersurfaces in for rather general choices of the (rotationally symmetric) prescribed mean curvature function : hyperplanes, cylinders, bowls, catenoids, convex spheres, unduloids and nodoids. This might suggest that -hypersurfaces behave roughly as CMC hypersurfaces. In this section we shall see, however, that there are many other possible types of rotational -hypersurfaces in . For definiteness, we will restrict our discussion to the case .
So, in what follows, we will consider some specific functions , which define rotationally symmetric functions by means of (2.1), and we will construct rotational -surfaces in associated to them.
We first consider the case that touches its rotation axis orthogonally. If is an even positive function on , then is a strictly convex sphere (see Theorem 4.1). However, if is not even, the generic situation is that one of the orbits that start at in the phase space ends up spiraling around the equilibrium, while the other one ends up leaving in a finite time of its parameter across one of the boundary curves (and thus, it enters the other phase space ). In the first case, we obtain properly embedded rotational -disks in that converge asymptotically to the vertical cylinder of mean curvature , wiggling around it. See Figure 5.1. In the second case, we typically obtain properly immersed, non-embedded, rotational -disks that do not remain at a bounded distance from their rotation axis. See Figure 5.2.
Another less common, but still possible situation, is that the orbit in that starts at converges to the equilibrium without spiraling around it. This gives examples of complete, non-entire, strictly convex rotational -graphs that converge asymptotically to a cylinder. For instance, consider the rotational surface in around the -axis, with profile curve , with . Note that is the generating curve of the Grim reaper cylinder in the theory of self translating solitons of the mean curvature flow.
The curve is a strictly convex curve asymptotic to the vertical line . A straightforward computation yields that has angle function given by , and its mean curvature function can be written as a function of , as follows: , where is given by
[TABLE]
Since for all , we can extend to be a positive function on . Thus, for the prescribed mean curvature function in associated to such we obtain the existence of a strictly convex rotational -graph with the topology of a disk which is asymptotic to the right circular cylinder of radius .
We consider next the case that the rotational surface does not touch its rotation axis. Assume that satisfies , with (resp. ) if (resp. ). Then, by analyzing the resulting phase space as in previous results, we obtain the existence of wing-like -catenoids; see Figure 5.4. They have a similar shape to the well-known rotational wing-like translating solitons to the mean curvature flow (see [CSS]), which are recovered for the specific choice . All of them are properly immersed annuli in , with their two ends going both either upwards or downwards.
Consider, finally, the case that satisfies , with if . In that case there exist two types of properly immersed, rotational -surfaces with the topology of an annulus, but this time with one end going upwards and the other going downwards. Each of such ends can be seen as a strictly convex graph over an exterior planar domain .
In the first type of these examples, the coordinate of the profile curve of is monotonous, and so is properly embedded; see Figure 5.5. In the second type of examples, is not monotonous, and the profile curve describes a nodoid-type loop along which loses embeddedness. See Figure 5.6
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1]
- 2[Al] A.D. Alexandrov, Uniqueness theorems for surfaces in the large, I, Vestnik Leningrad Univ. 11 (1956), 5–17. (English translation: Amer. Math. Soc. Transl. 21 (1962), 341–354).
- 3[BV] M.F. Bidaut-Veron, Rotationally symmetric hypersurfaces with prescribed mean curvature, Pacific J. Math. 173 (1996), 29–67.
- 4[B 1] A. Bueno, Translating solitons of the mean curvature flow in the space ℍ 2 × ℝ superscript ℍ 2 ℝ \mathbb{H}^{2}\times\mathbb{R} , J. Geom. (2018) 109:42. https://doi.org/10.1007/s 00022-018-0447-x
- 5[B 2] A. Bueno, Prescribed mean curvature surfaces in the product spaces 𝕄 2 ( κ ) × ℝ superscript 𝕄 2 𝜅 ℝ \mathbb{M}^{2}(\kappa)\times\mathbb{R} ; Analysis of rotational surfaces, existence of spheres and a Delaunay-type classification result, preprint (2018), ar Xiv:1807.10040.
- 6[B 3] A. Bueno, Half-space theorems for properly immersed surfaces in ℝ 3 superscript ℝ 3 \mathbb{R}^{3} with prescribed mean curvature, preprint, (2019), ar Xiv:1901.04343
- 7[BGM] A. Bueno, J.A. Gálvez, P. Mira, The global geometry of surfaces with prescribed mean curvature in ℝ 3 superscript ℝ 3 \mathbb{R}^{3} , preprint (2018), ar Xiv:1802.08146.
- 8[CSS] J. Clutterbuck, O. Schnurer, F. Schulze, Stability of translating solutions to mean curvature flow, Calc. Var. Partial Diff. Equations 29 (2007), no. 3, 281–293.