Real-Time Quad-Rotor Path Planning Using Convex Optimization and Compound State-Triggered Constraints
Michael Szmuk, Danylo Malyuta, Taylor P. Reynolds, Margaret Skye, Mceowen, and Behcet Acikmese

TL;DR
This paper introduces a novel approach using compound state-triggered constraints within convex optimization to enable real-time quad-rotor path planning, effectively replacing computationally intensive mixed-integer programming.
Contribution
It applies compound state-triggered constraints to quad-rotor path planning, integrating discrete decision logic into continuous optimization for the first time.
Findings
Successfully planned paths through hoops and obstacle courses.
Achieved real-time trajectory generation at over 3 Hz and 1.5 Hz.
Demonstrated reliability in Monte-Carlo simulations.
Abstract
The contribution of this paper is the application of compound state-triggered constraints (STCs) to real-time quad-rotor path planning. Originally developed for rocket landing applications, STCs are made up of a trigger condition and a constraint condition that are arranged such that satisfaction of the former implies satisfaction of the latter. Compound STCs go a step further by allowing multiple trigger and constraint conditions to be combined via Boolean "and" or "or" operations. The logical implications embodied by STCs can be formulated using continuous variables, and thus enable the incorporation of discrete decision making into a continuous optimization framework. In this paper, compound STCs are used to solve quad-rotor path planning problems that would typically require the use of computationally expensive mixed-integer programming techniques. Two scenarios are considered: (1)…
Click any figure to enlarge with its caption.
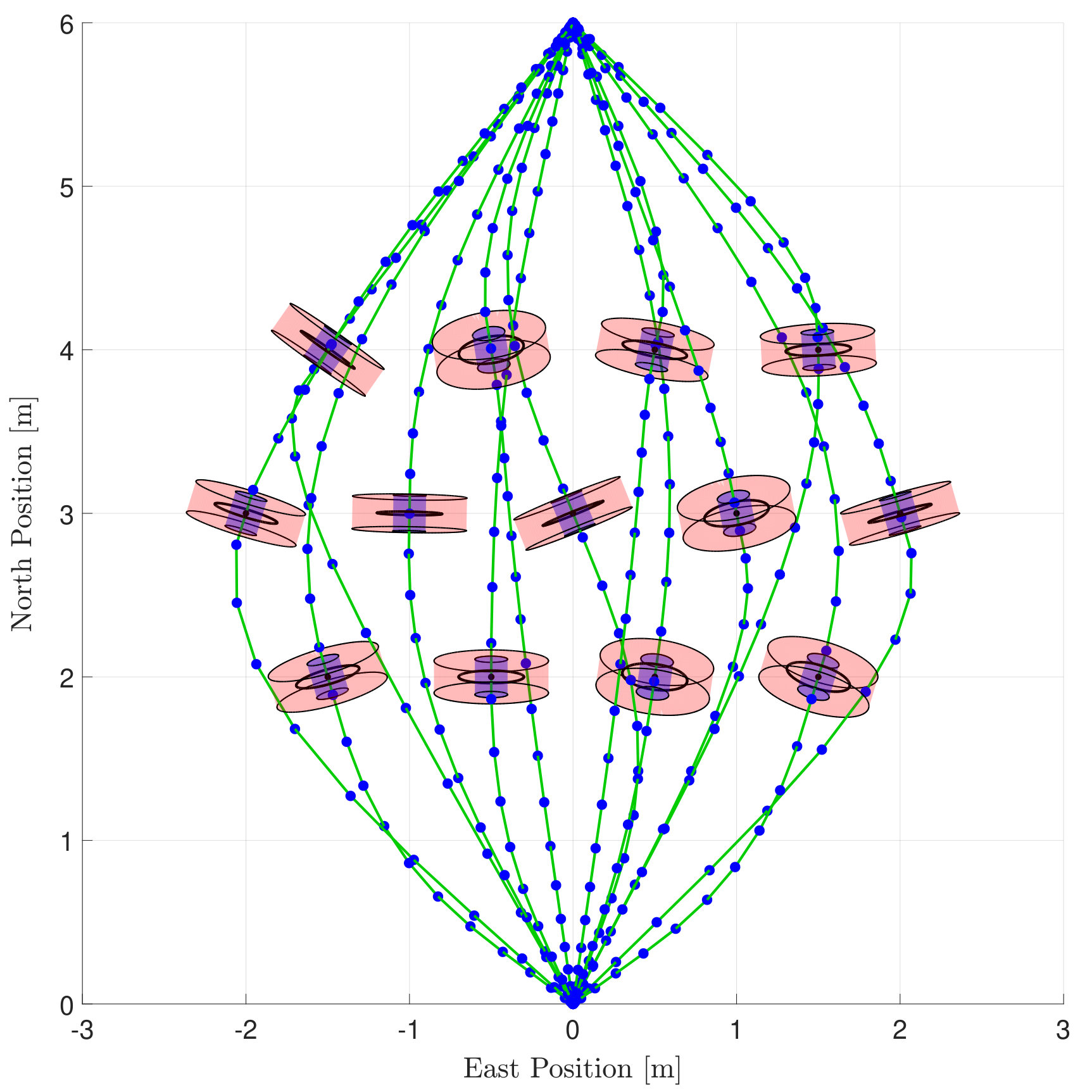 Figure 1
Figure 1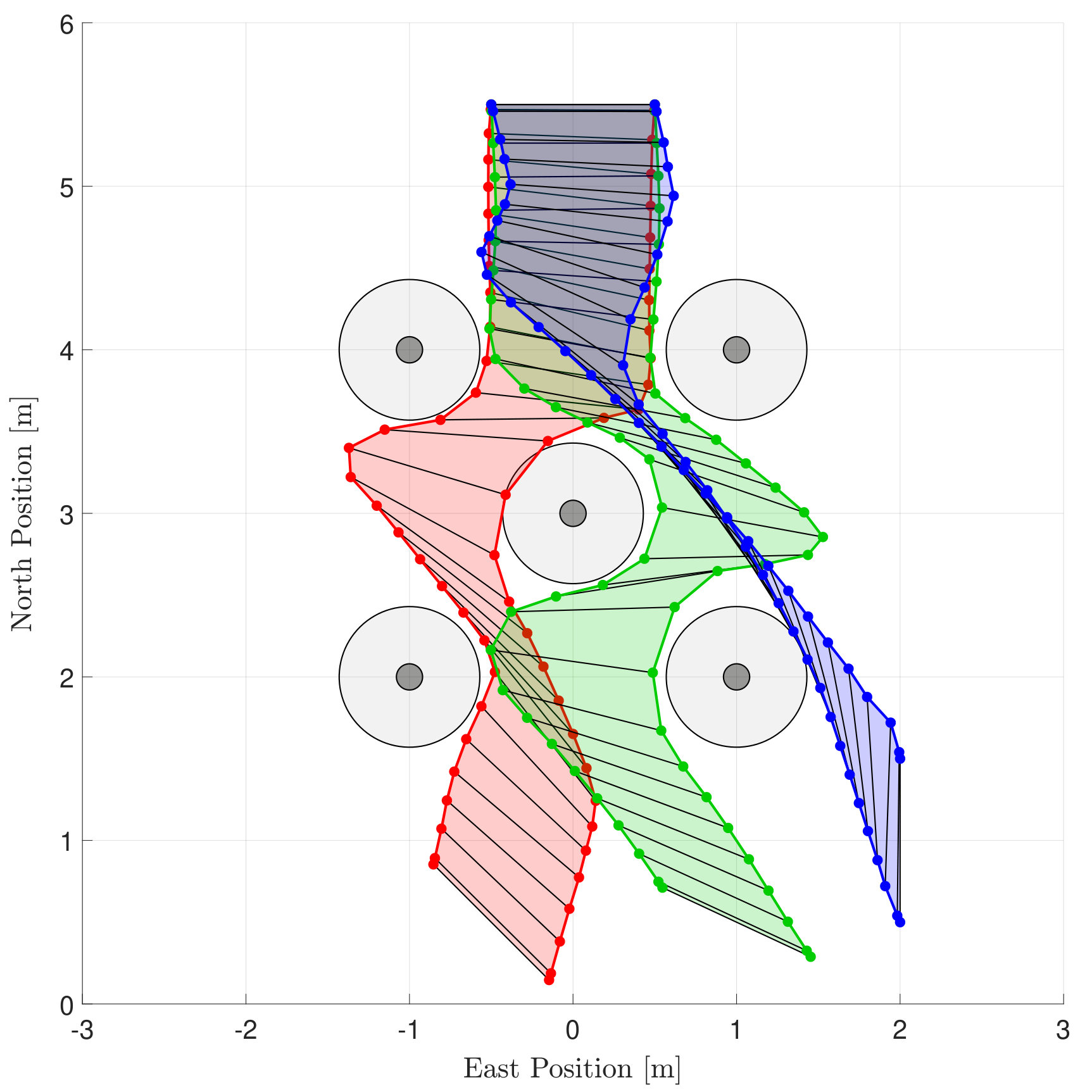 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.