Active Area Coverage from Equilibrium
Ian Abraham, Ahalya Prabhakar, and Todd D. Murphey

TL;DR
This paper presents a hybrid systems approach enabling robots to actively seek informative measurements while maintaining safe equilibrium states, demonstrated through various dynamic system applications.
Contribution
It introduces a controller based on hybrid systems theory that integrates stability with active data collection using Gaussian processes.
Findings
Successfully maintains Lyapunov attractiveness during active data collection
Demonstrates shape estimation, dynamic learning, and gait generation in different robotic systems
Shows effectiveness of the method in complex dynamic environments
Abstract
This paper develops a method for robots to integrate stability into actively seeking out informative measurements through coverage. We derive a controller using hybrid systems theory that allows us to consider safe equilibrium policies during active data collection. We show that our method is able to maintain Lyapunov attractiveness while still actively seeking out data. Using incremental sparse Gaussian processes, we define distributions which allow a robot to actively seek out informative measurements. We illustrate our methods for shape estimation using a cart double pendulum, dynamic model learning of a hovering quadrotor, and generating galloping gaits starting from stationary equilibrium by learning a dynamics model for the half-cheetah system from the Roboschool environment.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1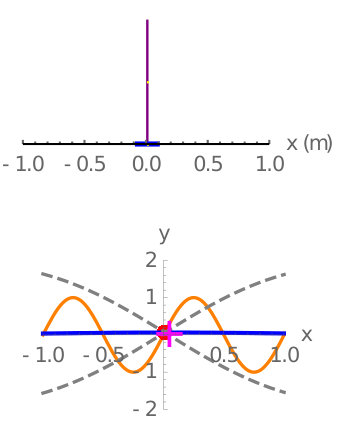 Figure 2
Figure 2 Figure 3
Figure 3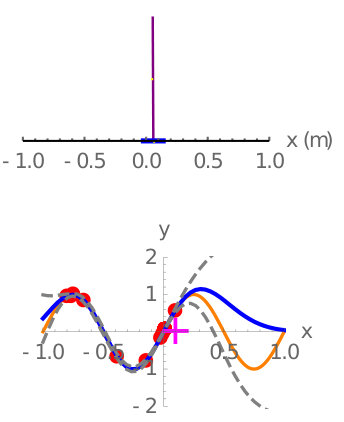 Figure 4
Figure 4 Figure 5
Figure 5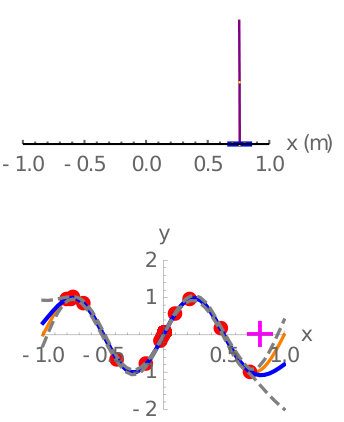 Figure 6
Figure 6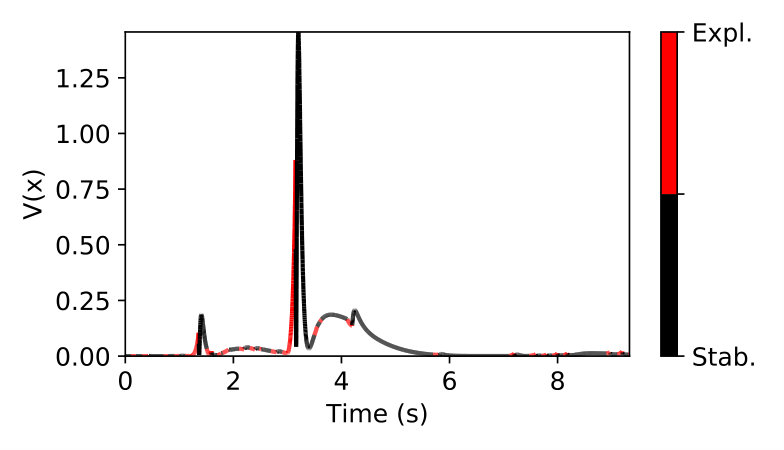 Figure 7
Figure 7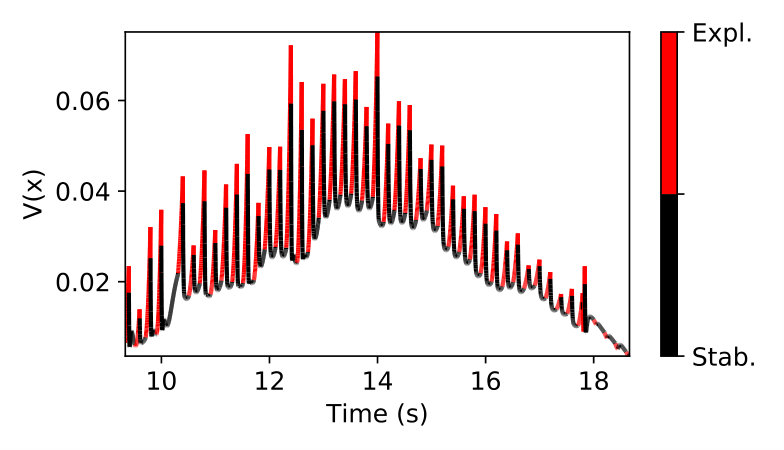 Figure 8
Figure 8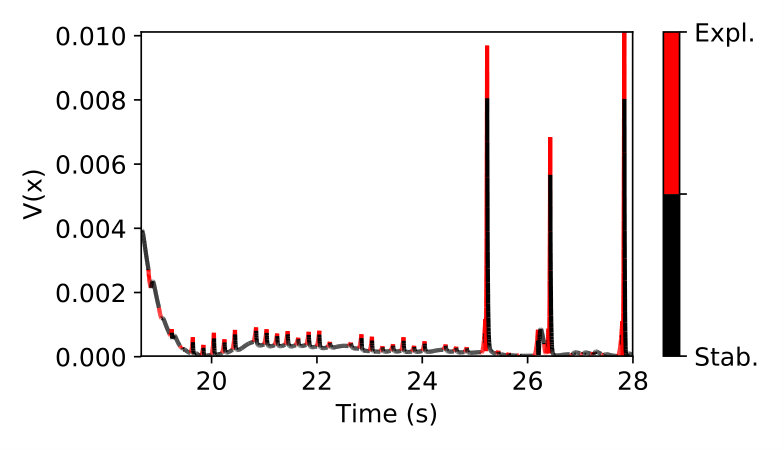 Figure 9
Figure 9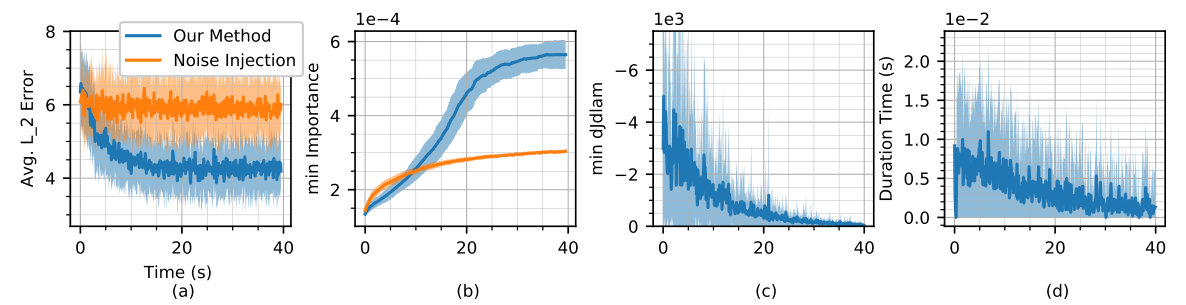 Figure 10
Figure 10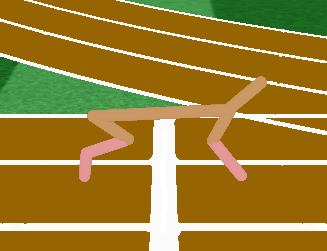 Figure 11
Figure 11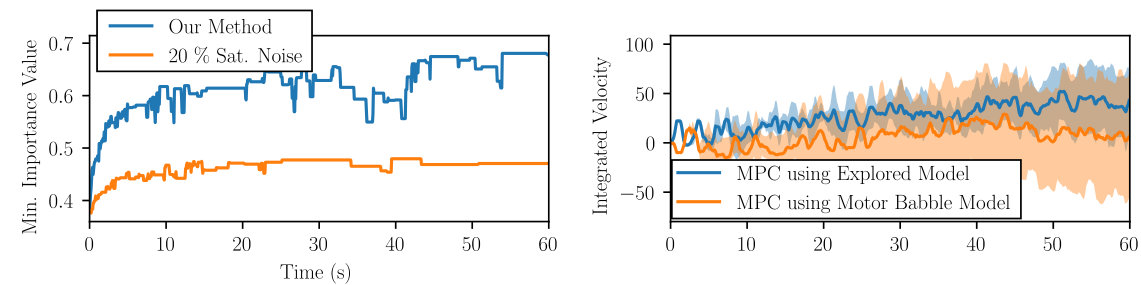 Figure 12
Figure 12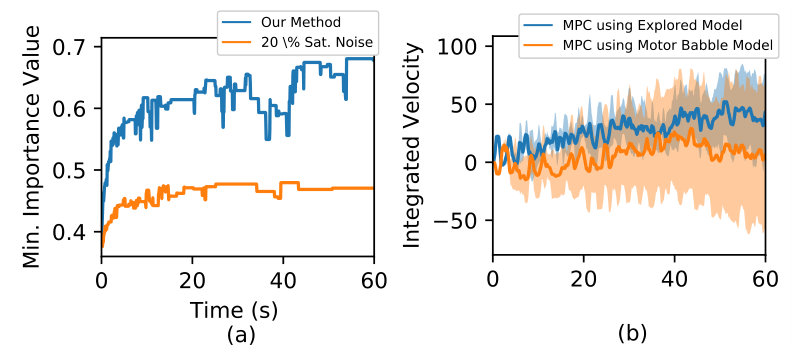 Figure 13
Figure 13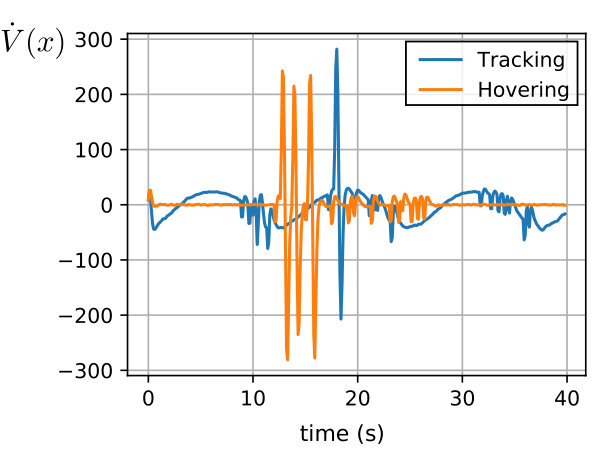 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.