Integer Programming as a General Solution Methodology for Path-Based Optimization in Robotics: Principles, Best Practices, and Applications
Shuai D. Han, Jingjin Yu

TL;DR
This paper presents a general, easy-to-apply integer programming methodology for solving complex path-based optimization problems in robotics, demonstrating high efficiency and optimality across multiple challenging applications.
Contribution
The paper introduces a simple two-step IP solution approach applicable to various path-based problems and proposes two new robotics problems solvable with this method.
Findings
Efficiently produces near-optimal solutions for large, complex problems.
Demonstrates applicability to multi-robot path planning, constraint removal, and reward collection.
Introduces two new robotics problems solved effectively with the proposed methodology.
Abstract
Integer programming (IP) has proven to be highly effective in solving many path-based optimization problems in robotics. However, the applications of IP are generally done in an ad-hoc, problem specific manner. In this work, after examined a wide range of path-based optimization problems, we describe an IP solution methodology for these problems that is both easy to apply (in two simple steps) and high-performance in terms of the computation time and the achieved optimality. We demonstrate the generality of our approach through the application to three challenging path-based optimization problems: multi-robot path planning (MPP), minimum constraint removal (MCR), and reward collection problems RCPs). Associated experiments show that the approach can efficiently produce (near-)optimal solutions for problems with large state spaces, complex constraints, and complicated objective…
Click any figure to enlarge with its caption.
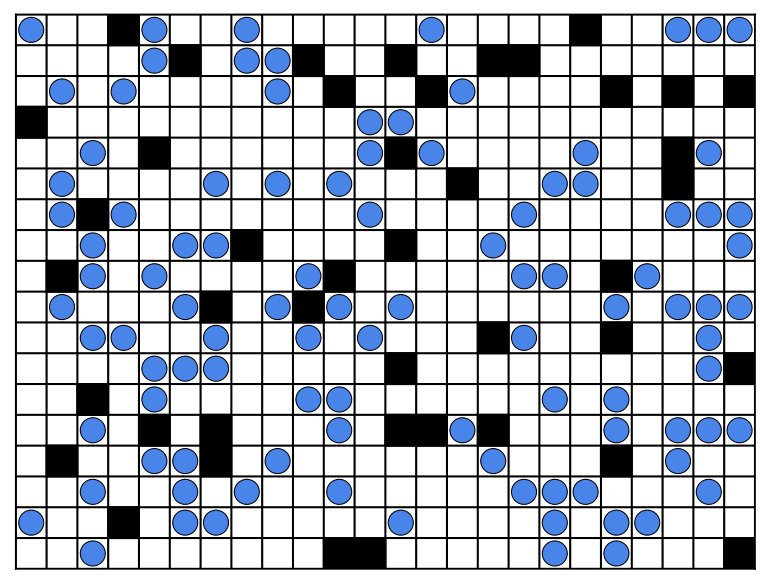 Figure 1
Figure 1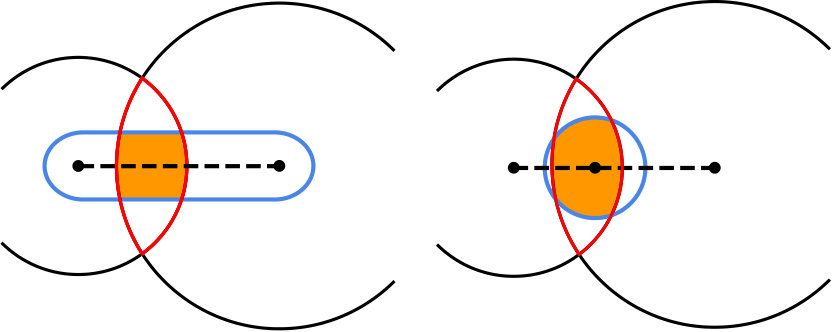 Figure 2
Figure 2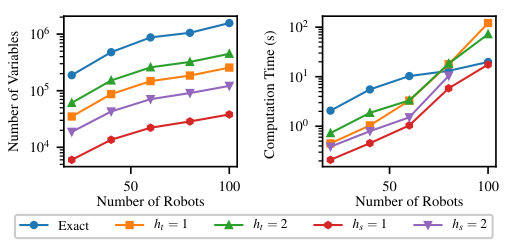 Figure 3
Figure 3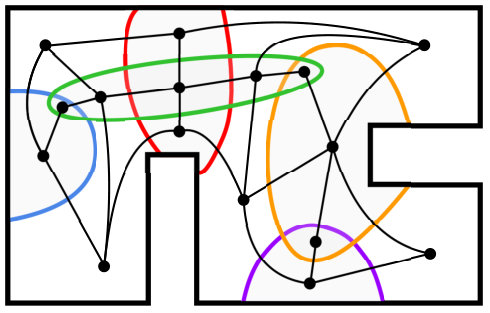 Figure 4
Figure 4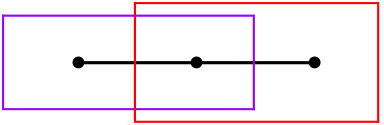 Figure 5
Figure 5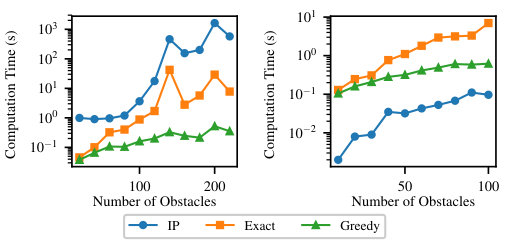 Figure 6
Figure 6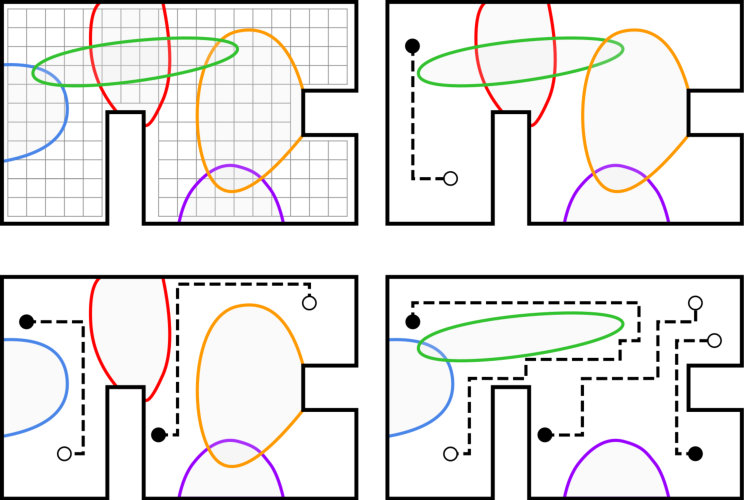 Figure 7
Figure 7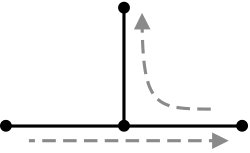 Figure 8
Figure 8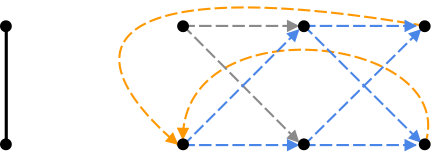 Figure 9
Figure 9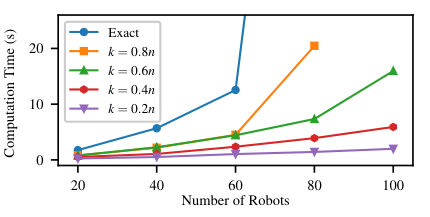 Figure 10
Figure 10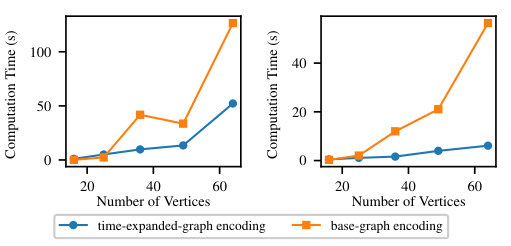 Figure 11
Figure 11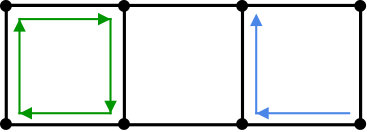 Figure 12
Figure 12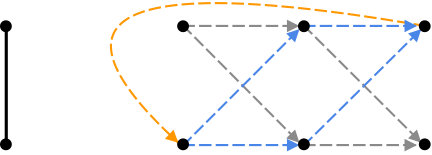 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Vehicle Routing Optimization Methods · Formal Methods in Verification
Integer Programming as a General Solution Methodology for Path-Based Optimization in Robotics: Principles, Best Practices, and Applications
Shuai D. Han Jingjin Yu
S. D. Han and J. Yu are with the Department of Computer Science, Rutgers, the State University of New Jersey, Piscataway, NJ, USA. E-Mails: {shuai.han, jingjin.yu} @ rutgers.edu.
Abstract
Integer programming (IP) has proven to be highly effective in solving many path-based optimization problems in robotics. However, the applications of IP are generally done in an ad-hoc, problem specific manner. In this work, after examined a wide range of path-based optimization problems, we describe an IP solution methodology for these problems that is both easy to apply (in two simple steps) and high-performance in terms of the computation time and the achieved optimality. We demonstrate the generality of our approach through the application to three challenging path-based optimization problems: multi-robot path planning (MPP), minimum constraint removal (MCR), and reward collection problems (RCPs). Associated experiments show that the approach can efficiently produce (near-)optimal solutions for problems with large state spaces, complex constraints, and complicated objective functions. In conjunction with the proposition of the IP methodology, we introduce two new and practical robotics problems: multi-robot minimum constraint removal (MMCR) and multi-robot path planning (MPP) with partial solutions, which can be quickly and effectively solved using our proposed IP solution pipeline.
I introduction
The study of robot task and motion planning problems aims at finding a path (resp., paths) for the robot (resp., robots) to optimize certain cumulative cost or reward. While some settings admit efficient search-based algorithmic solutions, e.g., via dynamic programming, such problems are frequently computationally intractable [1, 2]. In such cases, two approaches are often employed: (i) designing polynomial-time algorithms that compute approximately optimal solutions, and (ii) applying greedy search, assisted with heuristics. Both approaches have their fair share of drawbacks in practical applications: the former does not always ensure good optimality and the later often does not scale well as the problem instance becomes larger.
In this paper, we describe an integer programming (IP) methodology as a third general solution approach toward challenging path-based optimization problems. The key to building an IP-based solution is the construction of a model constituting of variables and inequalities that encodes all constraints of the target problem. For optimizing over paths, we make the important observation that it is natural to partition the model construction process into a path-encoding step followed by a second step that adds the optimization constraints. Following this methodology, we can readily solve many distinct and challenging path-based optimization problems including multi-robot path planning (MPP), minimum constraint removal (MCR), and reward collection problems (RCPs). As shown with extensive evaluation, the IP approaches often come with competitive performance in terms of both computation time and solution optimality. In conjunction with the proposition of the IP methodology, we introduce two new robotics problems: multi-robot minimum constraint removal (MMCR) and multi-robot path planning (MPP) with partial solutions. These problems are natural generalizations of MCR and MPP, respectively, that are practical but can be more challenging computationally.
Related Work. Integer programming (IP) methods are widely used to tackle combinatorial optimization challenges since their inception [3, 4], with applications to a variety of problems spanning the traveling salesperson problem (TSP) [5], network flow [6], multi-target tracking [7], etc. More recent studies have applied IP on path optimization problems in robotics including multi-robot path planning [8, 9, 10] and robotic manipulation [11, 12], to list a few.
This work is motivated by and builds on a long line of work that used IP, starting with the surprising initial success as IP was applied to multi-robot path planning (MPP) [10], which achieved a leap in performance in optimally solving MPP. MPP is an important problem that finds applications in a diverse array of areas including evacuation [13], formation [14, 15], localization [16], microdroplet manipulation [17], object transportation [18], search and rescue [19], and human robot interaction [20]. In the past decade, significant progress has been made on optimally solving MPP problems in discrete, graph-base environments. Algorithmic solutions for such a discrete MPP are often through reduction to other problems [21, 22, 10]. Decoupling-based heuristics are also proven to be useful [23, 24, 25]. Similar to the partial solution aspect examined in this paper, a recent work [26] provides a search-based solver which optimizes the number of robots that reach goals in a limited time horizon.
To demonstrate the generality and ease of application of our methodology, we also examined the minimum constraint removal (MCR) and a class of robotic reward collection problems (RCPs). MCR, which requires finding a path while removing the least number of blocking obstacles, is relevant to constraint-based task and motion planning [27, 28], object rearrangement [29, 12], and control strategy design [30]. Two search-based solvers are provided in [1] that extend to weighted obstacles [31]. Methods exist that balance between optimality, path length and computation time [32]. Recent studies on MCR reduce the gap between lower and upper bounds regarding optimality [33]. Reward collection problems (RCPs) are generally concerned with gathering rewards without exceeding some (e.g., time or distance) budget. There is a variety of such problems including the classical traveling salesperson problem (TSP) [34] and the orienteering problem (OP) [35]. Our focus here is geared toward the more complex variations [36, 37] involving non-additive optimization objectives. Such problems model challenging information gathering tasks, e.g., precision agriculture [38], monitoring environmental attributes of the ocean [39], and infrastructure inspection [40]. These problems are generally at least NP-hard [41, 35, 1].
**Contributions. This study brings two main contributions: **
- •
Building on previous studies, we propose a general integer programming (IP) solution framework for path-based optimization problems in robotics. The two-step pipeline of the framework is easy to apply and also frequently produces highly optimal solutions.
- •
We formulate the multi-robot minimum constraint removal (MMCR) problem and the multi-robot path planning (MPP) with partial solutions problem, as practical generalizations of MCR and MPP, respectively. We show that the IP approach can effectively solve these new problems.
In addition to the main contributions, the study provides many additional, problem-specific heuristics that significantly enhance the performance of the baseline IP formulation; some of these heuristics are also generally applicable. Unless explicitly mentioned and referenced, the enhancements (e.g., heuristics) described in the paper are also presented here for the first time. While IP-based methods have already been used in robotics, to the best of our knowledge, this work is the first one that summarizes a general IP framework that can be readily applied to a variety of path-based optimization problems, backed by thorough simulation-based experimental evaluations.
Organization. The rest of this paper is structured as follows. In Section II, we formally define MPP, multi-robot MCR, and RCP. In Section III, we outline the general IP solution methodology and describe two tried-and-true approaches for path encoding. In Sections IV–VI, we demonstrate how the IP model may be completed for the three diverse robotics problems and introduce many best practices along the way. We conclude in Section VII. In Appendix, we provide a guidance to IP implementation.
II Preliminaries
II-A Path-Based Optimization Problems
For stating path-based optimization problems, we adopt the standard graph-theoretic encoding of paths. Consider a connected undirected graph with vertex set and edge set . For , let be the neighborhood of . For a robot with initial and goal vertices , a path is defined as a sequence of vertices satisfying: (i) ; (ii) ; (iii) , or . For robots with their initial and goal configurations given as and , the paths are then , where . These paths are not necessarily collision-free. We now outline three diverse classes of path-based optimization problems.
II-A1 Multi-Robot Path Planning (MPP)
The main task in multi-robot path planning (MPP) is routing robots to their goals while avoiding robot-robot collisions, which happen when two robots meet at a vertex or an edge. Note that the graph-theoretic formulation already considers static obstacles. For to be collision-free, , must satisfy: (i) ; (ii) . The objective for MPP is to minimize the makespan , which is the time for all the robots to reach the goal vertices.
In this paper, we also introduce a practical MPP generalization that allows partial solutions, i.e., only robots are required to reach their pre-specified goals. This formulation models diminishing reward scenarios where the payoff stops accumulating after a certain amount of targets are reached. Here, the ending vertices for the other paths can be arbitrary vertices in . Note that must still be collision-free. Being more general, the problem is also much more difficult to solve. We note that this setting is different from the case where the robots are indistinguishable, which is much simpler and admits fast polynomial time algorithms.
Problem 1** (Generalized Time-Optimal MPP).**
Given , find a collision-free path set that routes at least robots to the goals and minimizes .
An example for (partial) MPP is provided in Fig. 1.
II-A2 Multi-Robot Minimum Constraint Removal (MMCR)
Given a graph , let an obstacle be a subset of vertices in . Given a finite set of obstacles , the multi-robot minimum constraint removal problem seeks a solution and a set of obstacles to be removed , such that paths in do not traverse through any obstacles in . The objective is to minimize the number of obstacles to be removed, i.e., . More formally:
Problem 2** (MMCR).**
Given , find and which minimizes , and for all : .
An illustration of MMCR is provided in Fig. 2.
II-A3 Reward Collection Problem (RCP)
Denote as the set of non-negative real numbers. In a reward collection problem (RCP), a robot is tasked to travel on a graph for a limited amount of time , while maximizing the reward it collects111Multi-robot RCP can be readily defined; we omit the such discussions given the already extensive multi-robot coverage and the page limit.. Such a setup defines two functions: a cost function specifies the time already spent, and a reward function tracks the reward collected along . Obviously, time here may be replaced by other types of bounded resources, e.g., fuel.
Problem 3** (RCP).**
Given , find that maximize under the constraint ,
We work with two variations of RCP in this paper: the quadratic correlated orienteering problem (QCOP) and the optimal tourist problem (OTP).
In a Quadratic Correlated Orienteering Problem (QCOP), each vertex is associated with a reward . If , not only but also partial rewards from vertices in are collected if does not contain these vertices. Denote the correlated weights as , the maximum possible reward collected from is . Suppose indicates whether , the total reward collected is
[TABLE]
In QCOP, each edge is associated with a time cost . The time constraint of QCOP requires that
[TABLE]
In an Optimal Tourist Problem (OTP), the reward collected at vertex is described by a non-decreasing function , where is the length of time that the robot spends at . The total reward is then expressed as
[TABLE]
Similar to QCOP, the time constraint of OTP requires that
[TABLE]
It has been shown that optimal MPP, QCOP, and OTP are all NP-hard [2, 36, 37]. MMCR is a multi-robot generalization of the single-robot MCR problem, which is known to be NP-hard [1]. As a consequence, MMCR is also computationally intractable.
II-B Integer Programming Basics
Integer programming (IP), roughly speaking, addresses a class of problems that optimize an objective function subject to integer constraints. A typical IP sub-class is integer linear programming (ILP). Given a vector consists of integer variables, a general ILP model is expressed as:
[TABLE]
Here, are vectors and is a matrix. In general, solution to must contain only integers. Note that the formulation is compatible with equality constraints since an equality constraint can be interpreted as two inequality constraints. As will be demonstrated, due to IP’s rather straightforward formulation, the reduction from path-planning problems to IP are often not hard to achieve in low polynomial time using our methodology. Apart from the unsophiscated reductions, IP is also a well-known fundamental methematical problem that has been studied extensively. Thus, an IP model can often be solved quickly and optimally using solvers like Gurobi [42], Cplex [43] and GLPK [44].
Remark*.*
As a note on scope, our work studies IP formulations and path-based optimization problems from an algorithmic perspective. We do not handle execution details such as workspace discretization, uncertainties, and communication issues. These items are eventually to be manged by other parts in the system. For example, with proper synchronization and feedback based control, solutions generated by the ILP-based MPP solver [10] can be readily executed on multi-robot hardware platforms [45].
III General Methodology and Path Encoding
Our methodology for path-based optimization problems generally follows a straightforward two-step process. In the first step, a basic IP model is constructed that ensures only feasible paths are produced. This is the path encoding step. For example, in the case of a multi-robot path planning problem, the IP model must produce multiple paths that connect the desired start and goal configurations. In the second step, the optimization criteria and additional constraints, e.g., for collision avoidance, is enforced. In our experience, the path encoding step has a limited variations whereas the second step often has more variations and requires some creativity.
In this section, we provide detailed descriptions of two IP models for encoding paths: a base-graph encoding that works with the original edge set , and a time-expanded-graph encoding that encodes paths on a new graph generated by making multiple time-stamped copies of the vertex set . Feasible assignments to the integer variables in a given model correspond (in a one-to-one manner) to all possible paths in the original problem. The optimization step will be introduced in the next section.
III-A Base-Graph Encoding
We define a non-cyclic path to be a path that goes through any vertex at most once, i.e., . Given , the base graph encoding introduces a binary variable for each edge to indicate whether uses . The following constraints must be satisfied:
[TABLE]
[TABLE]
[TABLE]
Here, constraint (5) and (6) make starts from and ends at . Constraint (7) ensures that for each vertex, one outgoing edge is used if and only if an incoming edge is used. It prevents the path from creating multiple branches, and also forces each vertex to appear in at most once.
A solution from this formulation could contain subtours, which are cycles formed by edges that are disjoint from (see Fig. 3). As introduced in [36], these subtours can be eliminated by creating integer variables for each , and adding the following constraint for each pair of vertices :
[TABLE]
Proposition III.1**.**
Given , there exists a bijection between solutions to the base-graph encoding IP model and all non-cyclic paths in from to .
Proof.
() Given a feasible solution of the base-graph encoding IP model, a non-cyclic path starts from is constructed by following positive edge variables until reaching . The path is guaranteed to be feasible since (i) by constraint (5) and (6), the path can only start at and end at , (ii) by constraint (7) and (8), the path is composed of non-repetitive vertices in connected by edges in .
() A non-cyclic path can be translated to a feasible solution to the IP model by assigning the corresponding edge variables to and all others to [math]. These values satisfies constraint (5) (6) (7) (8) because is a sequence of vertices starts from , ends at , connected by edges, and has no subtours. ∎
When , we split () into two vertices and connect them to all the vertices in . A path can then be formulated on the graph with vertex set . The resulting path is acyclic in the new graph, but interpreted as a cycled path in and contains ().
III-B Time-Expanded-Graph Encoding
This path encoding method uses a time-expanded-graph instead of the original graph . Given a fixed time horizon , we make copies of , namely . Neighboring vertices in adjacent time steps are then connected by directed edges: for , the edge set between and is . We then add a directed feedback edge connecting to . An example is provided in Fig. 4. Similar to base-graph encoding, we use a binary variable to indicate whether is used. The variable associated with the feedback edge is . By denoting the outgoing (resp. incoming) edges of in this time-expanded graph as (resp. ), , constraints (5) (6) (7) are now expressed as:
[TABLE]
[TABLE]
The representation of a feasible path in this time-expanded graph is a sequence of directed edges that starts from , travel through exactly one vertex in each of , and finally goes back to uses the feedback edge. Similarly, a 1-1 solution correspondence exists in this case [10].
Proposition III.2**.**
There is a bijection function between feasible paths in with length less than , and feasible paths in the -step time-expanded-graph.
In a time-expanded-graph encoding, the length of the path generated is limited by the time horizon . The path can contain any vertex for multiple times. The number of variables in the time-expanded-graph encoding can be reduced by performing reachability tests (see Fig. 4), which remove edges not reachable from or . Reachability tests do not affect completeness and optimality. Scalability can be further improved using -way split [10], a divide-and-conquer heuristic that splits a problem into smaller sub-problems. The sub-problems require much shorter time to solve together than solving a single large problem.
III-C Basic Extensions of the Two Encoding
Both encoding can handle the case when a robot has multiple initials or goals to choose. In base-graph encoding, this is done by adding one virtual vertex, and connecting it to all possible initials and goals. In the time-expanded-graph encoding formulation, the same objective can be achieved by adding multiple feedback edges.
Both encoding can also be extended to the multi-robot scenario. Which is achieved by simply making one copy of all variables for each robot. The paths can then be planned disregarding mutual collisions. As we will show soon, with additional constraints, the time-expanded-graph encoding is able to generate collision-free paths.
Here we note that our IP models are solved using Gurobi Solver [42]. All experiments are executed on an Intel® CoreTM i7-6900K CPU with 32GB RAM at 2133MHz.
IV Time-Optimal Multi-Robot Path Planning
A high-performance time-optimal MPP IP model was proposed in [10] using the time-expanded-graph encoding. We review this baseline model and introduce two generic new heuristics for trimming the state space. We then introduce an updated IP model for MPP with partial solution.
The basic method [10] first calculates an underestimated by routing each robot to its goal without considering robot-robot collisions. This is achieved by running A* searches and taking the maximum path length. Then, an IP model is built and the feasibility is checked: for each robot , a set of variables satisfying constraints (9) and (10) is created and renamed as . The method tries to find a feasible variable value assignment with the following additional constraints: for all ,
[TABLE]
[TABLE]
Here, constraint (11) prevents robots from simultaneously occupying the same vertex, while constraint (12) eliminates head-to-head collisions on edges in . By Proposition III.2, an infeasible model indicates that no feasible solution exists in makespan . Then, with incremented by , the model is re-constructed and solved again. Once the model has a feasible solution, a solution to MPP with optimal makespan is then extracted.
Effective new heuristics. Intuitively, the time to solve an IP is often negatively correlated with the number of variables in the model. This suggests that the computation time may be reduced if we remove vertices in which are not likely to be part of the solution path. Recall that when calculating the underestimated makespan, for each robot , a shortest path from to is obtained. When the graph is not densely occupied, we are likely to find a solution by make some minor modifications to these initial candidate paths. Building on the analysis, we propose two new heuristics, based on reachability analysis, to reduce the number of variables in the IP model.
IV-1 Tubular Neighborhood
Fixing some parameter , for robot , the time-expanded-graph includes only if is within distance from some vertices in . The reachability region in this case mimics a tube around the candidate path. The rationale behind the heuristic is that, in general, the actual path a robot takes is not likely to significantly deviate from the reference path .
IV-2 Reachability Sphere
Fixing some parameter , for robot , the time-expanded-graph includes only if is within distance from the -th element in . The basic principle behind the reachability sphere heuristic is similar to that for the tubular neighborhood heuristic.
The effect of tubular neighborhood and reachability sphere heuristics are visualized on the left and right of Fig. 5, respectively. In this example, we visualize the variables when and assume for robot , . The dashed straight lines indicate , with their left ends and right ends . For clearness, all other vertices are not shown. If no heuristic is applied, contains all the vertices in the entire canvas. Through reachability tests, a vertex is removed from if it is not reachable from in time , or from in time . Reachability tests remove all the vertices not in the intersection of the two arcs centered at and , making contain only the vertices in the region with red boundaries. The tubular neighborhood heuristic with on the left sub-graph and the reachability sphere heuristic with on the right then removes all the vertices out of the shapes with blue borders. The vertices that are copied to are colored in orange.
We evaluate how the heuristics influence the performance using randomly generated test cases on a grid. As it is shown in Fig. 6, the number of variables is reduced by more than when or ; the computation time is reduced by at least when . In the best case (the red curve), the reduction in computation time is over ten fold, which is very significant. Somewhat to our surprise, for more than robots, reduced variable count in the IP model does not always translate to faster solution time. After digging in further, this seems to be related to how the Gurobi solver works: we could verify that our heuristics interfere with Gurobi’s own heuristics when there are too many robots. We report that the achieved optimality is not affected by the new heuristics for all the test cases.
Partial Solutions. To accommodate the constraint in Problem 1, we prioritize using the individual path lengths in determining the time expansion parameter . That is, we pick to the maximum length of the shortest robot paths out of the paths. For the rest of the robots, we allow their goals in the IP model to be in a neighborhood of their respective specified goals. This is achieved through the heuristics of adding additional feedback edges (see Fig. 7) for these robots. Note that now the reachability test should not be applied to the goals of these robots.
In evaluating the general MPP solver, we use a grid with vertices removed to simulate obstacles (see Fig. 8 for an example). As shown in Fig. 9, running time is significantly reduced when we only need a partial solution.
Support for a non-fully labeled problem. We can also adapt the existing IP model to resolve the problem in which a group of robots are indistinguishable, i.e., they are assigned a set of goals without individual targets. The final configuration of these robots in a solution can be an arbitrary permutation of the goals. This is also known as the -colored motion planning problem [46]. To update the model, suppose a group of robots share goal vertices, we create a single copy of for this group, and add feedback edges between all the pairs of initials and goals. The summation of the variables associated with these edges is set to be .
V Multi-Robot Minimum Constraint Removal
As implicitly stated in [1], the state space of MCR can be reduced by building a graph reflecting the coverage of different combinations of obstacles. Here, we explicitly construct this graph such that each element in is a set of connected vertices that exist in the same set of obstacles. Specifically, satisfies the following constraints: (i) ; (ii) , if and only if ; (iii) , there exists a path from to , and formed by elements in . Under this definition, , and , . In our implementation, is built by iteratively selecting a random and run breadth first search from until all the leaf nodes collide with different sets of obstacles from . An undirected edge is added to the edge set if there exist and , such that . An example is shown in Fig. 10.
For each robot , we denote as the set contains and as the set contains . We assume since otherwise the set of obstacles that need to be removed for robot is trivially . With slight abuse of notation, we denote as the neighborhood of . Following base-graph encoding, for each robot , a set of variables satisfying constraints (5) (6) (7) are created and renamed as .
In the rest of this section, unless otherwise stated, a path refers to a path in . We introduce binary variables to indicate if at least one of paths contains , and to indicate whether must be removed to make the paths do not collide with obstacles. The constraints for these variables are:
[TABLE]
[TABLE]
Here, is a large constant. Constraint (13) assigns positive values to only if is in any path. Constraint (14) ensures that , if , then are all assigned positive values. The objective for this model is to minimize , i.e., the number of obstacles to be removed. Note that subtour elimination is unnecessary in MMCR since neither a subtour nor duplicate elements in a path reduce the objective value. Robot-robot collision is not considered (but can be if needed). After solving this IP, the obstacles to be removed can be extracted from the model, after which an actual robot trajectory can be found easily.
We compare the IP approach to two search-based solvers from [1]. For MCR, a search node in these solvers is a tuple , where is the robot’s current location, and is the set of all the obstacles encountered from tracing back to . Different pruning methods are then applied to reduce the search space, giving rise to exact and greedy solvers. Both the exact and greedy solvers can be extended to MMCR via maintaining locations for all robots in the search state.
The comparison results are given in Fig. 11. The left figure is for MCR evaluated on a grid and the right one for MMCR with on a grid. All test cases are generated by randomly placing arbitrary sized rectangular obstacles in the grids.
We observe that the exact IP method runs slower than the exact discrete search-based method for MCR but significantly outperforms both search-based methods on MMCR. We believe the reason is that with a single robot in a grid-based environment, the problem is not “complex” enough for IP-based method to utilize its structural advantages. Further evaluation shows that our IP method can solve a problem on a grid with robots and obstacles in around seconds, while the search-based solvers would fail to complete in such a case.
As may be observed in Fig. 11, left, the computation time does not grow monotonically as the number of obstacles increases, even though the data is already averaged over instances. This is due to the NP-hardness of MCR and there could be some random instances that are particularly hard to solve. However, note that the relative performance difference between methods remains consistent.
VI Reward Collection Problems
In this section, we examine some complex reward collection problems (RCPs) to further demonstrate the flexibility of our IP methodology. The initial work on QCOP [36] and OTP [37] used base-graph encoding. We show here these problems can also be solved using time-expanded-graph encoding to gain better computational performance.
In QCOP, the initial and goal vertices can be freely chosen from fixed sets . To handle this, we create a virtual vertex and add directed edges from to all the candidacy initial vertices in , and from all the possible goal vertices in to . Specifically, these directed edges are added to the time-expanded-graph: . For a fixed time horizon , constraint (9) is now expressed as
[TABLE]
Using a binary variable to indicate whether is in the path, the constraint to assign a correct value to is
[TABLE]
With binary variables indicating whether vertices and edges are used, the objective value (1) (to be maximized) is directly encoded into the IP model. The time consumption requirement (2) is added as a constraint.
The time-expanded model for OTP is similar to QCOP with one extra set of constraints to ensure , and an additional set of non-integer non-negative variables to indicate how long the robot stays at . The constraint ensures that is a positive value only if is in the path where is a large constant.
We use variable size grid settings similar to those from [36, 37] for evaluation. We let contain randomly selected vertices. In QCOP, ; a random reward weight is assigned to each vertex. In OTP, we assume are linear functions with random positive coefficients. We observe from the result (Fig. 12) that the time-expanded-graph encoding is always competitive and performs significantly better as the size of the problem gets larger.
VII Discussion and Conclusion
In this work, building on previous efforts, we propose a two-step integer programming (IP) methodology for solving path-based optimization problems. The approach is applicable to a variety of computationally hard problems in robotics involving filtering through a huge set of candidate paths. Although simple to use, harnessing the power of heavily optimized solvers, the IP method comes with performance that is often competitive or even beats conventional methods. We point out two major strengths that come with the IP solution method: (i) due to its ease of use, the time that is required for developing a solution can be greatly reduced, and (ii) the method can provide reference optimal solutions to help speed up the design of conventional algorithms. With the study, which provides principles and many best practices for IP model construction for path-based optimization, we hope to promote the adoption of the method as a first choice when practitioners in robotics attack a new problem.
Appendix:
Detailed IP Model Construction Practice
In this section, we provide implementation details of our IP formulations using some simple problem examples. To better show the IP structures, we
- •
do not fully apply the reachability test, and
- •
do not remove redundant variables and constraints.
VII-A MPP* with Partial Solution*
Consider as shown in Fig 13, with problem parameters . Using a time-expanded encoding method, the binary variables in our IP formulation for are:
[TABLE]
[TABLE]
where the first variables denote the usage of feedback edges, and the last variables denote the usage of time-expanded edges generated from .
The objective function is:
[TABLE]
The constraints in the IP formulation are:
By constraint (9),
[TABLE]
By constraint (10),
[TABLE]
[TABLE]
By constraint (11),
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
By constraint (12):
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
Note that for a partial solution, the objective function does not need to be optimized; we can terminate the IP solution process when
[TABLE]
VII-B MPP* Heuristics*
Continuing with the previous example, when we use tubular neighborhood with , variables and will both be set to [math] since the shortest path for robot does not include . When rechability spheres with is used, more variables will be set to [math]. For this specific problem instance, these modifications do not affect the solution feasibility and optimality.
Note that although a good reachability test will remove all the variables mentioned above, on a larger problem instance the variables affected by each heuristic are generally not subsets of each other.
VII-C MMCR
As visualized in Fig 13, we add two obstacles into the previous MPP example to make it a MMCR example. With the same problem parameters . Using the base graph formulation, the binary variables are:
[TABLE]
[TABLE]
[TABLE]
The objective function is to minimize the number of obstacles that intersect with paths:
[TABLE]
By constraint (5),
[TABLE]
[TABLE]
By constraint (6),
[TABLE]
[TABLE]
By constraint (7),
[TABLE]
[TABLE]
Note that constraint (8) is not necessary in MMCR since additional subtours cannot decrease the value of the objective function.
By constraint (13),
[TABLE]
[TABLE]
[TABLE]
By constraint (14),
[TABLE]
[TABLE]
VII-D RCP
For this section, we only demonstrate an implementation example for OTP since the formulation can be roughly considered as QCOP with extra variables and constraints. We continue to use the graph in Fig. 13. Consider the three vertices are associated with three linear reward functions ; the robot starts from vertex ; the cost of edge and are and ; the maximum cost is ; . Using a time-expanded encoding method and with the additional virtual vertex , the binary variables in our IP formulation for are:
[TABLE]
[TABLE]
The three additional continuous variables are:
[TABLE]
The objective function is:
[TABLE]
By constraint (4),
[TABLE]
By constraint (15) (instead of (9)),
[TABLE]
By constraint (10),
[TABLE]
[TABLE]
[TABLE]
[TABLE]
By constraint (16),
[TABLE]
[TABLE]
[TABLE]
Additional constraints for OTP are:
[TABLE]
[TABLE]
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] K. Hauser, “The minimum constraint removal problem with three robotics applications,” The International Journal of Robotics Research , vol. 33, no. 1, pp. 5–17, 2014.
- 2[2] J. Yu, “Intractability of optimal multi-robot path planning on planar graphs,” IEEE Robotics and Automation Letters , vol. 1, no. 1, pp. 33–40, 2016.
- 3[3] G. Dantzig, Linear programming and extensions . Princeton university press, 2016.
- 4[4] G. L. Nemhauser and L. A. Wolsey, “Integer programming and combinatorial optimization,” Wiley, Chichester. GL Nemhauser, MWP Savelsbergh, GS Sigismondi (1992). Constraint Classification for Mixed Integer Programming Formulations. COAL Bulletin , vol. 20, pp. 8–12, 1988.
- 5[5] C. E. Miller, A. W. Tucker, and R. A. Zemlin, “Integer programming formulation of traveling salesman problems,” Journal of the ACM (JACM) , vol. 7, no. 4, pp. 326–329, 1960.
- 6[6] T. C. Hu, “Integer programming and network flows,” WISCONSIN UNIV MADISON DEPT OF COMPUTER SCIENCES, Tech. Rep., 1969.
- 7[7] C. Morefield, “Application of 0-1 integer programming to multitarget tracking problems,” IEEE Transactions on Automatic Control , vol. 22, no. 3, pp. 302–312, 1977.
- 8[8] T. Schouwenaars, B. De Moor, E. Feron, and J. How, “Mixed integer programming for multi-vehicle path planning,” in Control Conference (ECC), 2001 European . IEEE, 2001, pp. 2603–2608.