TL;DR
This paper introduces a dynamic-weighted Simplex Architecture with reinforcement learning for CPS, improving safety and performance in autonomous systems by reducing violations and increasing speed.
Contribution
It proposes a novel dynamic-weighted ensemble extension of the Simplex Architecture, with a reinforcement learning mechanism and a hardware testbed for validation.
Findings
60% fewer out-of-track violations
Higher optimized speed of 0.4 m/s
Effective resource monitoring framework
Abstract
Cyber Physical Systems (CPS) have increasingly started using Learning Enabled Components (LECs) for performing perception-based control tasks. The simple design approach, and their capability to continuously learn has led to their widespread use in different autonomous applications. Despite their simplicity and impressive capabilities, these models are difficult to assure, which makes their use challenging. The problem of assuring CPS with untrusted controllers has been achieved using the Simplex Architecture. This architecture integrates the system to be assured with a safe controller and provides a decision logic to switch between the decisions of these controllers. However, the key challenges in using the Simplex Architecture are: (1) designing an effective decision logic, and (2) sudden transitions between controller decisions lead to inconsistent system performance. To address…
Click any figure to enlarge with its caption.
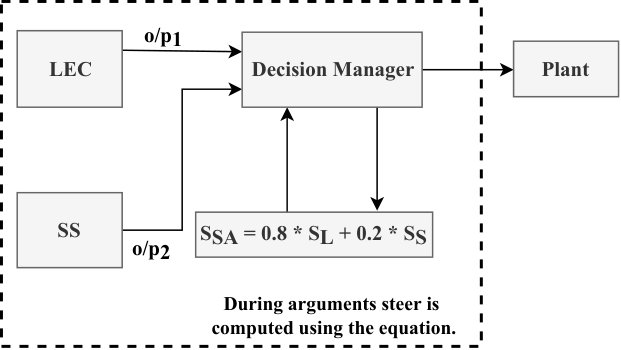 Figure 1
Figure 1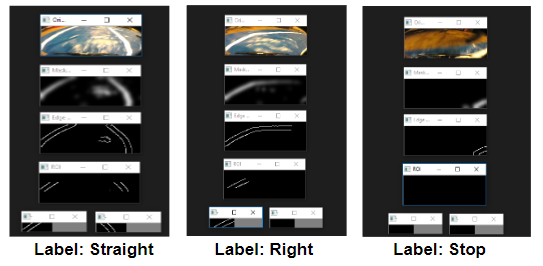 Figure 2
Figure 2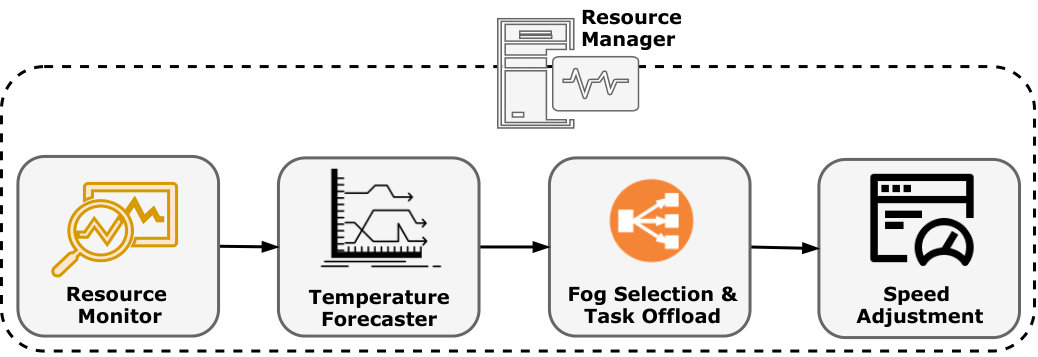 Figure 3
Figure 3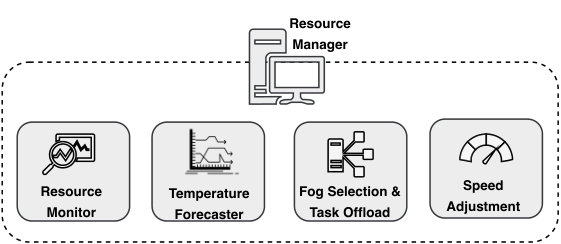 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8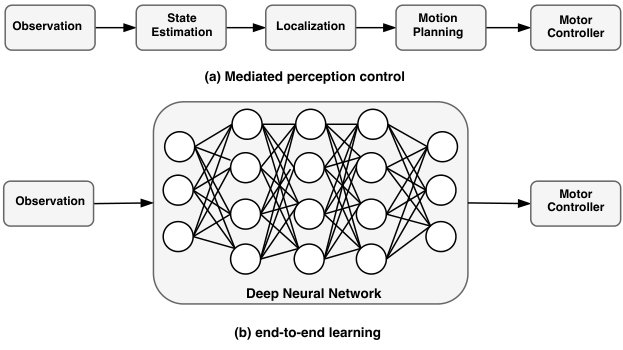 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12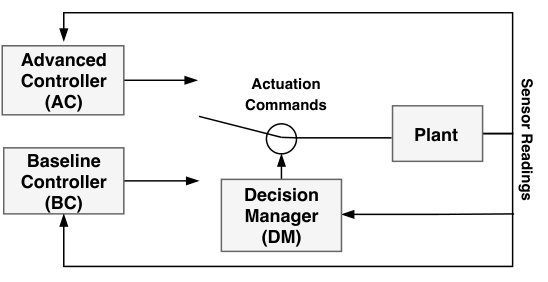 Figure 13
Figure 13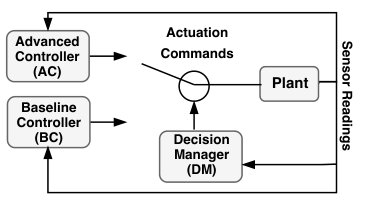 Figure 14
Figure 14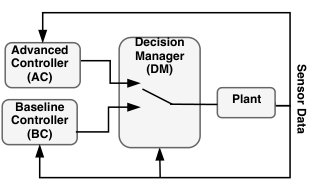 Figure 15
Figure 15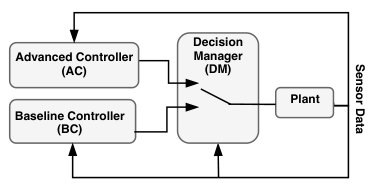 Figure 16
Figure 16 Figure 17
Figure 17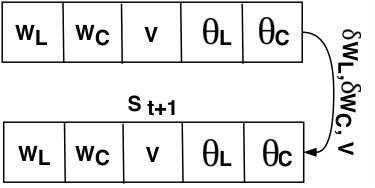 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Code & Models
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
MethodsSPEED: Separable Pyramidal Pooling EncodEr-Decoder for Real-Time Monocular Depth Estimation on Low-Resource Settings
