Iterative Learning Control for Fast and Accurate Position Tracking with an Articulated Soft Robotic Arm
Matthias Hofer, Lukas Spannagl, Raffaello D'Andrea

TL;DR
This paper demonstrates that an iterative learning control scheme significantly enhances the position tracking accuracy of an articulated soft robotic arm during rapid maneuvers, reducing errors from 13 to less than 2 degrees within 30 iterations.
Contribution
It introduces a norm-optimal iterative learning control method tailored for soft robotic arms, combining it with feedback control to achieve fast, accurate positioning during aggressive movements.
Findings
Root-mean-square tracking error reduced from 13° to <2°
Effective within fewer than 30 iterations
Applicable to high-speed, aggressive maneuvers
Abstract
This paper presents the application of an iterative learning control scheme to improve the position tracking performance for an articulated soft robotic arm during aggressive maneuvers. Two antagonistically arranged, inflatable bellows actuate the robotic arm and provide high compliance while enabling fast actuation. Switching valves are used for pressure control of the soft actuators. A norm-optimal iterative learning control scheme based on a linear model of the system is presented and applied in parallel with a feedback controller. The learning scheme is experimentally evaluated on an aggressive trajectory involving set point shifts of 60 degrees within 0.2 seconds. The effectiveness of the learning approach is demonstrated by a reduction of the root-mean-square tracking error from 13 degrees to less than 2 degrees after applying the learning scheme for less than 30 iterations.
Click any figure to enlarge with its caption.
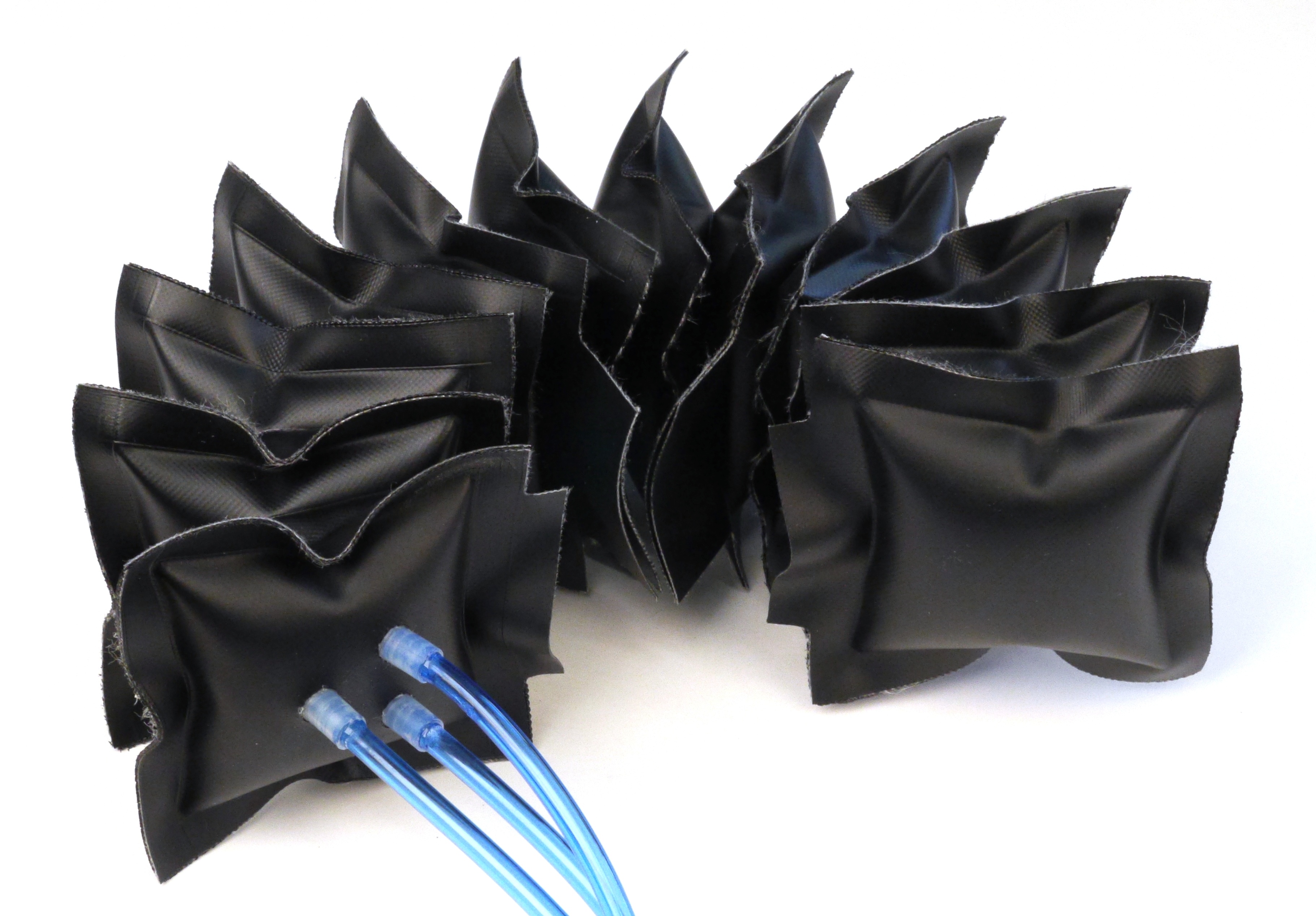 Figure 1
Figure 1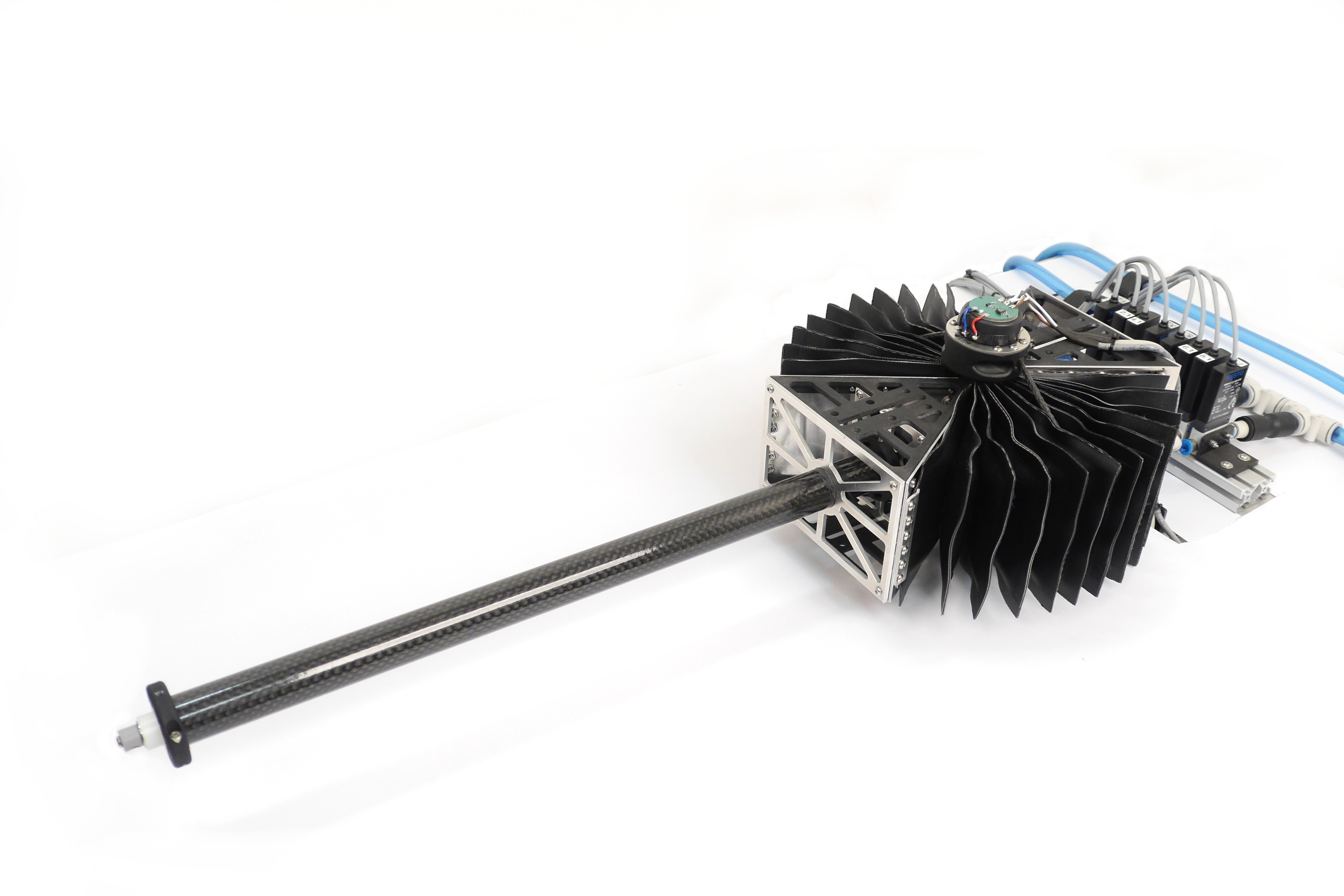 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.