Sufficient and necessary conditions for stabilizing singular fractional order systems with partially measurable state
Yiheng Wei, Jiachang Wang, Tianyu Liu, Yong Wang

TL;DR
This paper establishes necessary and sufficient conditions for stabilizing singular fractional order systems using observer-based and output feedback control, offering more general and efficient solutions than previous methods.
Contribution
It introduces new necessary and sufficient conditions for stabilization of singular fractional systems with partially measurable states, especially enhancing output feedback control techniques.
Findings
Derived conditions improve stabilization strategies for fractional systems.
Output feedback control conditions are more general and efficient.
Examples demonstrate the effectiveness of the proposed methods.
Abstract
This paper is concerned with the stabilization problem of singular fractional order systems with order . In addition to the sufficient and necessary condition for observer based control, a sufficient and necessary condition for output feedback control is proposed by adopting matrix variable decoupling technique. The developed results are more general and efficient than the existing works, especially for the output feedback case. Finally, two illustrative examples are given to verify the effectiveness and potential of the proposed approaches.
Click any figure to enlarge with its caption.
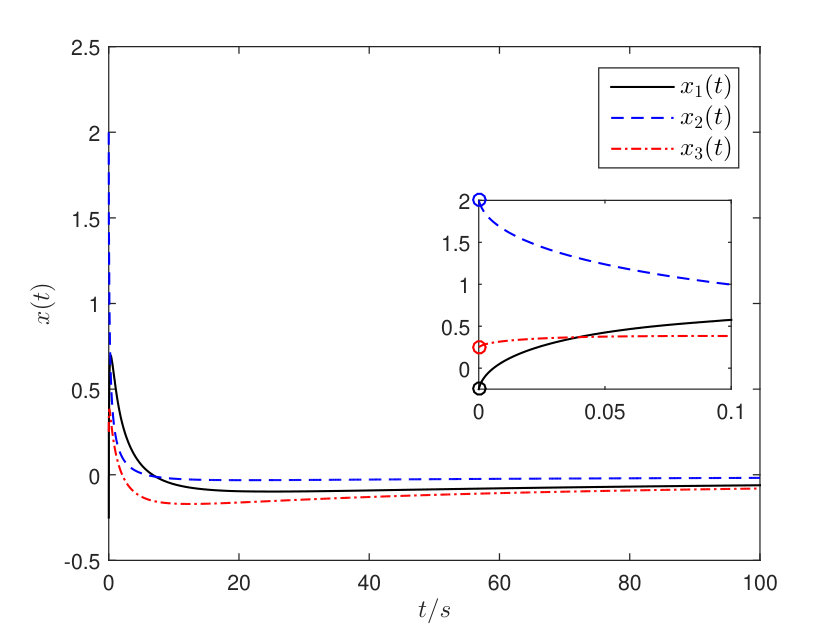 Figure 1
Figure 1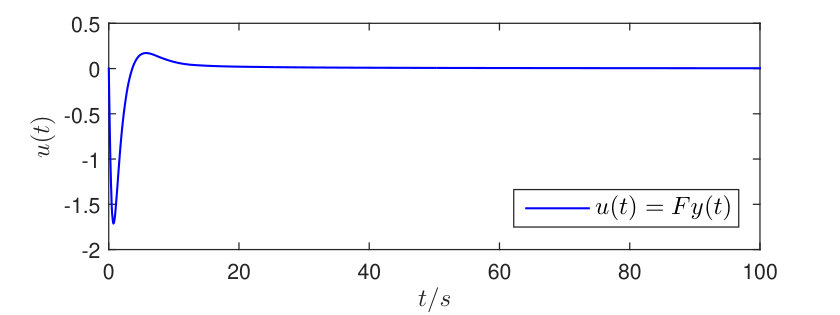 Figure 10
Figure 10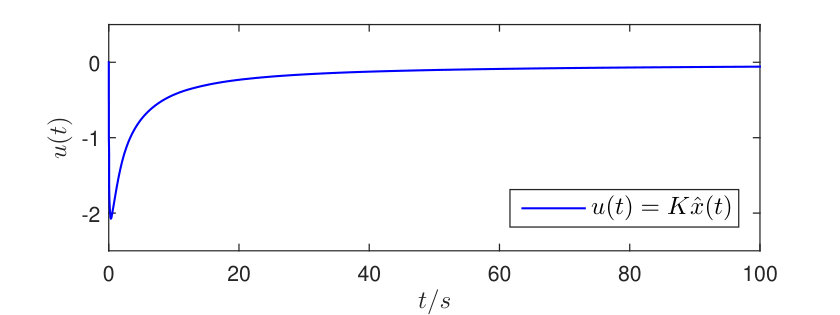 Figure 2
Figure 2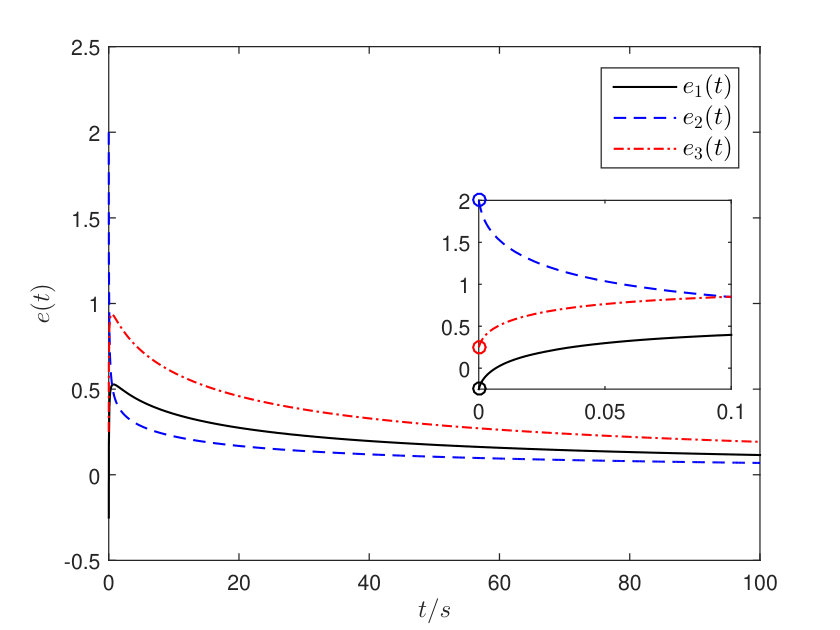 Figure 3
Figure 3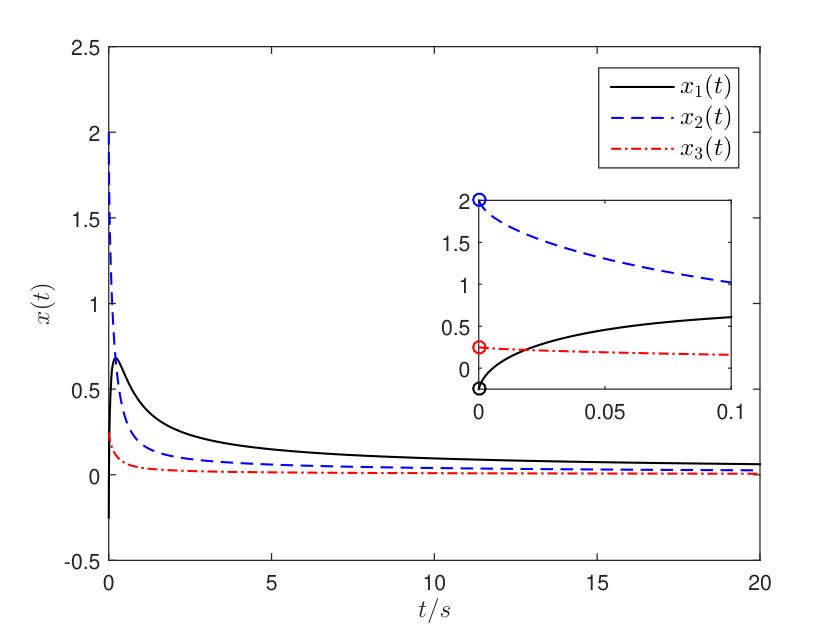 Figure 4
Figure 4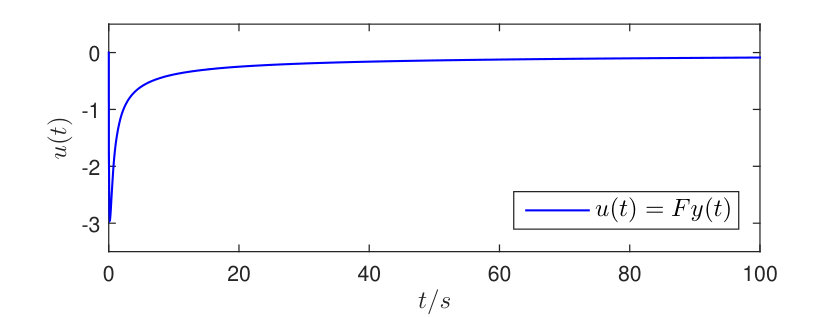 Figure 5
Figure 5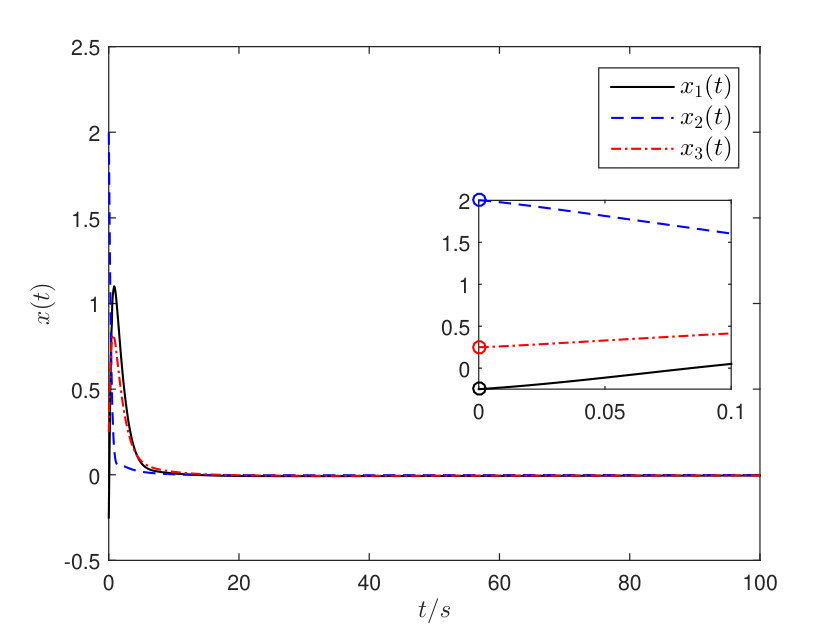 Figure 6
Figure 6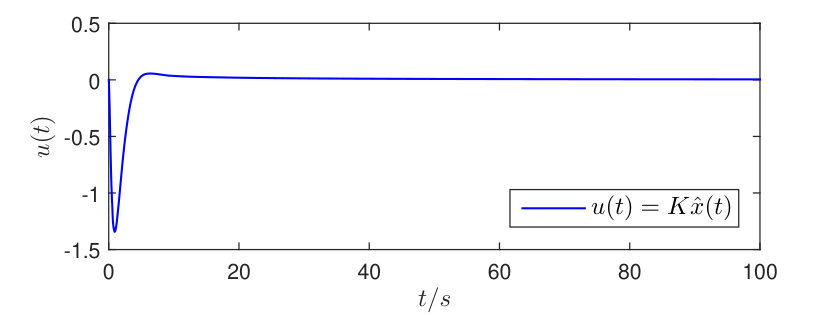 Figure 7
Figure 7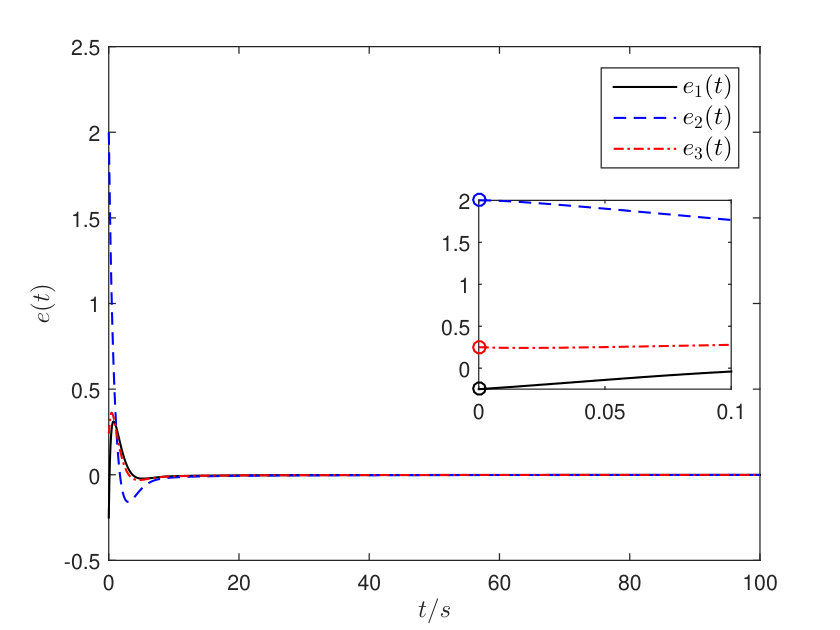 Figure 8
Figure 8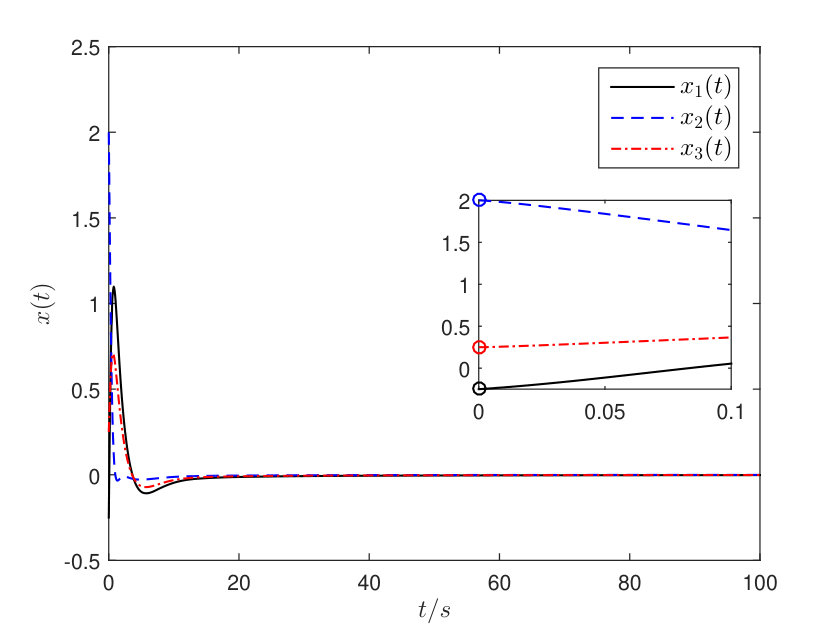 Figure 9
Figure 9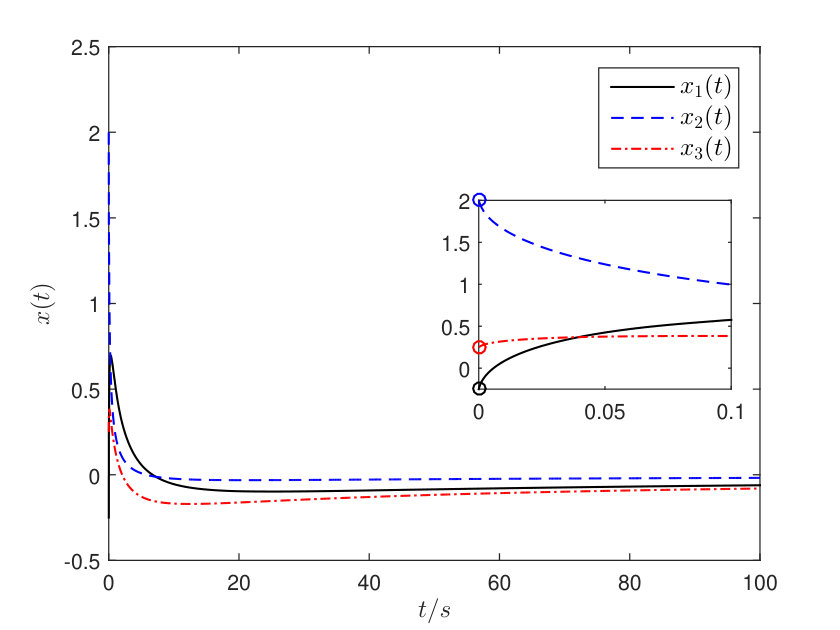 Figure 1
Figure 1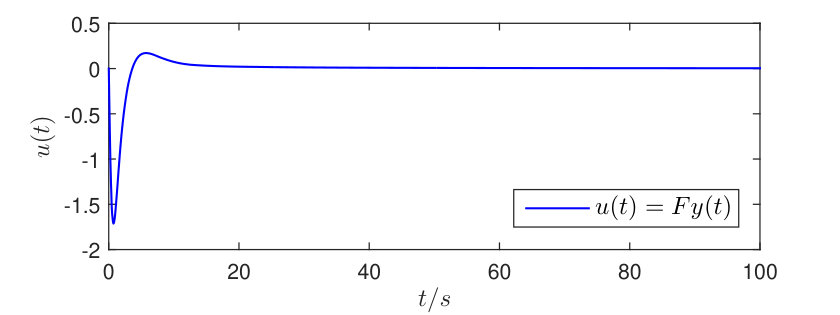 Figure 10
Figure 10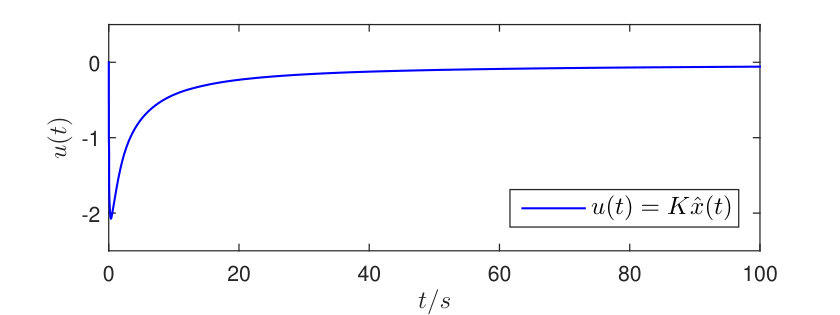 Figure 2
Figure 2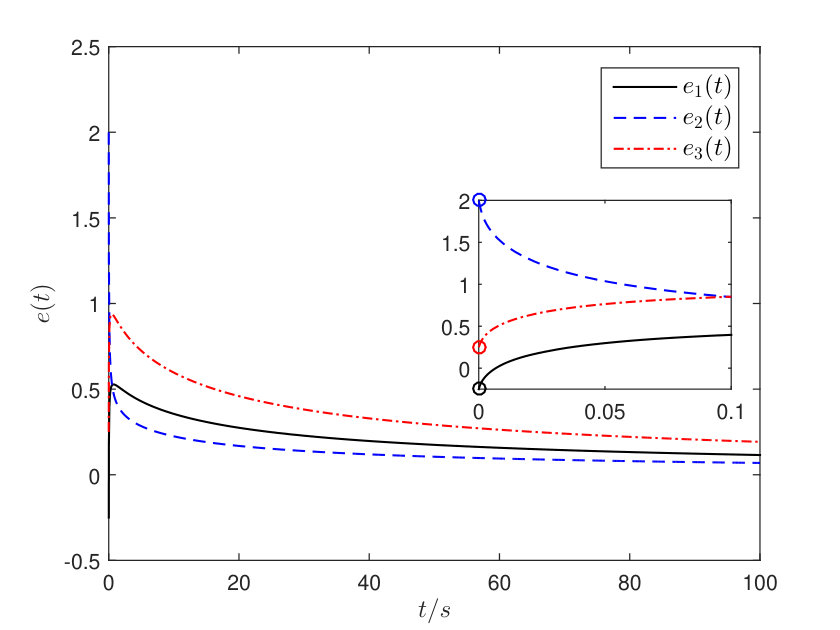 Figure 3
Figure 3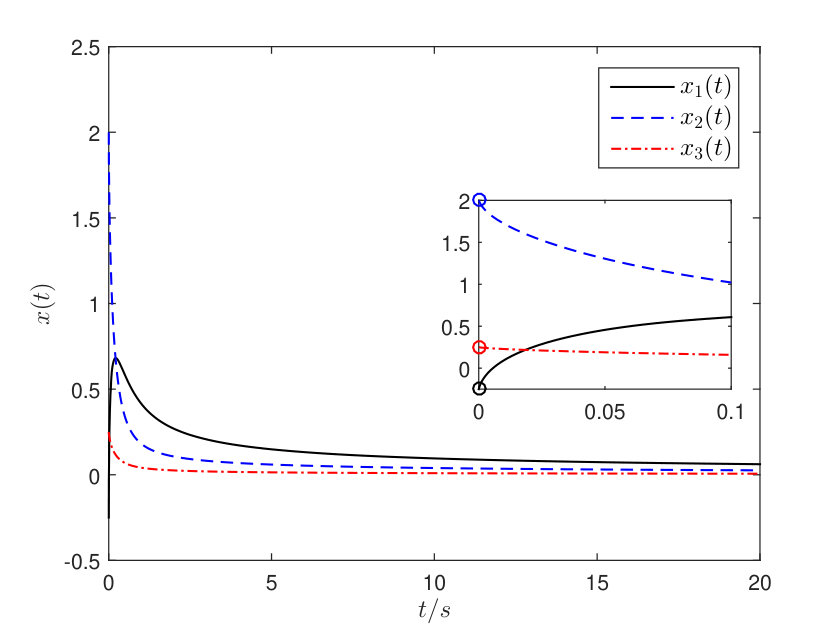 Figure 4
Figure 4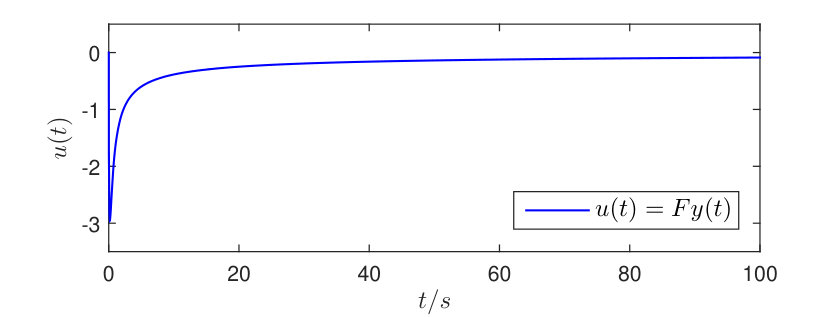 Figure 5
Figure 5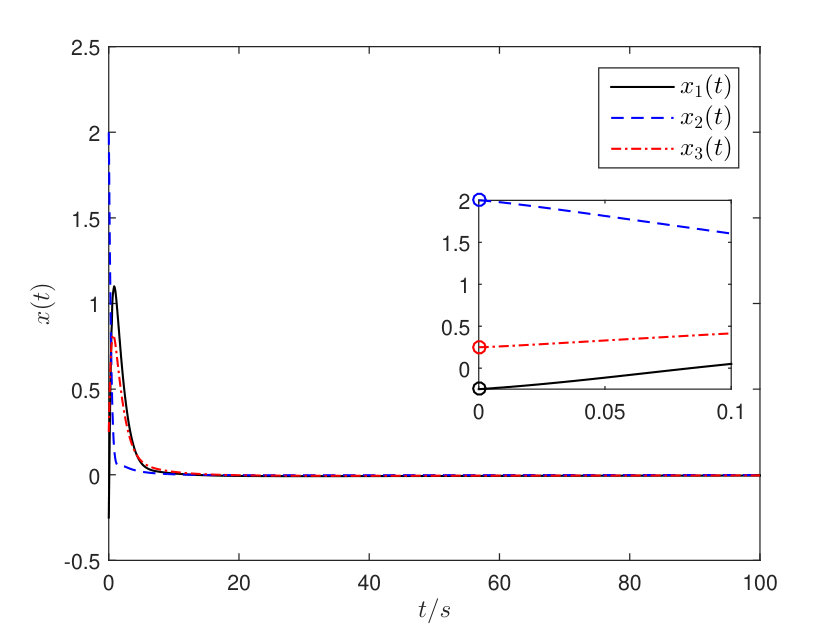 Figure 6
Figure 6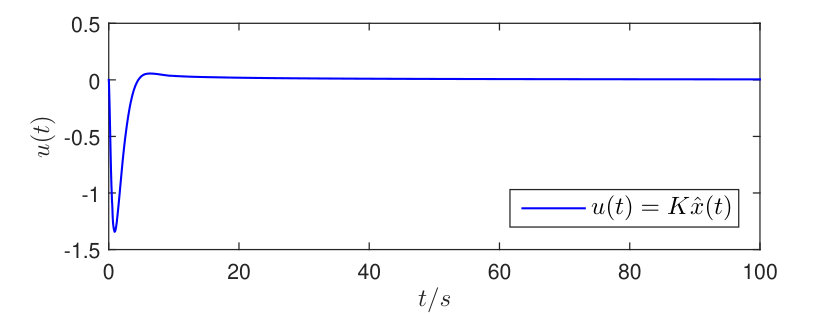 Figure 7
Figure 7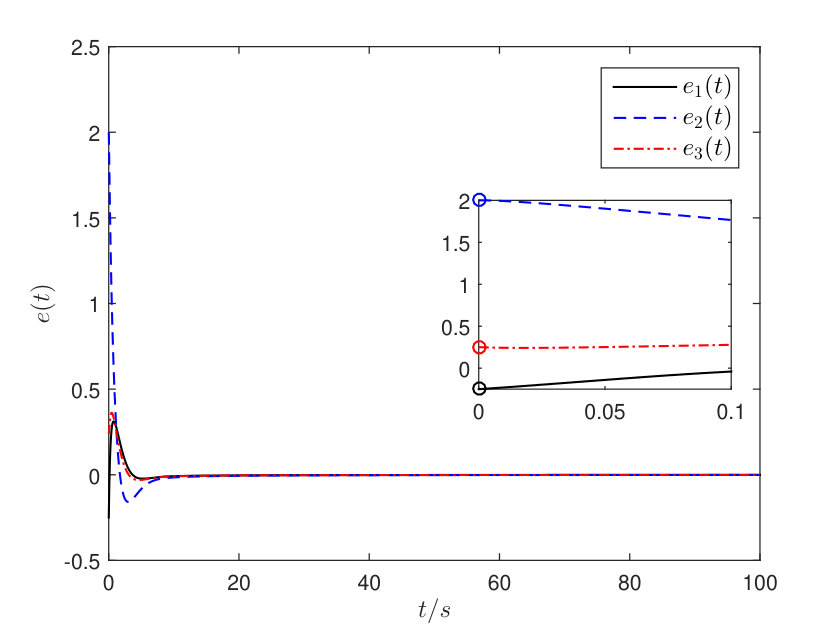 Figure 8
Figure 8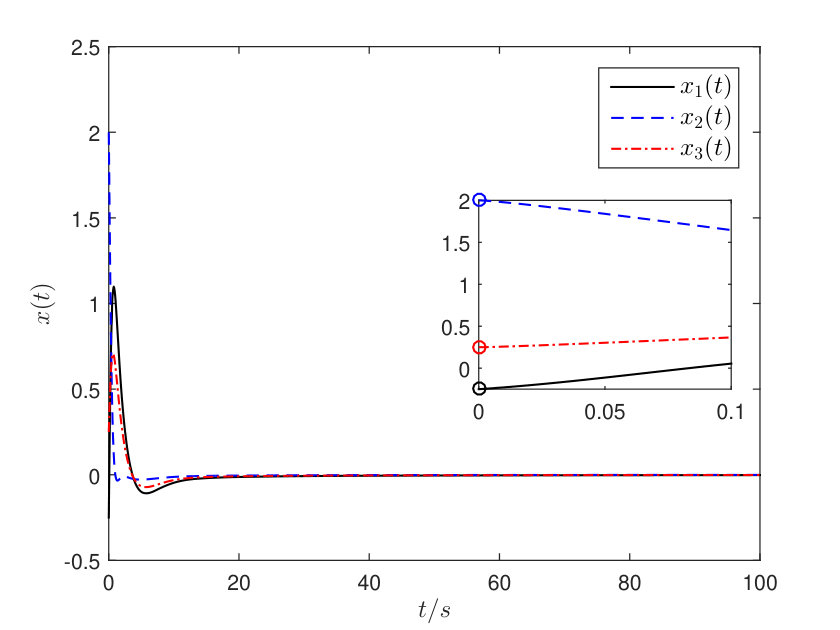 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Sufficient and necessary conditions for stabilizing singular fractional order systems with partially measurable state
Yiheng Wei, Jiachang Wang, Tianyu Liu, Yong Wang∗
Department of Automation, University of Science and Technology of China, Hefei, 230026, China
Abstract
This paper is concerned with the stabilization problem of singular fractional order systems with order . In addition to the sufficient and necessary condition for observer based control, a sufficient and necessary condition for output feedback control is proposed by adopting matrix variable decoupling technique. The developed results are more general and efficient than the existing works, especially for the output feedback case. Finally, two illustrative examples are given to verify the effectiveness and potential of the proposed approaches.
keywords:
Fractional order systems , singular systems, admissibility , stabilization , linear matrix inequality.
1 Introduction
Fractional order systems (FOSs) represent a useful class of systems which are more complicated than classical integer order systems. They often appear in various practical applications such as viscoelastic systems, electrochemistry, economy and biology systems [1, 2, 3]. Due to its importance in both theoretical study and practical applications, such systems attract increasing attention, especially with respect to system identification [4, 5], stability analysis [6, 7], controller synthesis [8, 9] and numerical computing [10, 11], etc.
As a particular-yet wide-class of systems, singular systems are more general than standard ones since they can be described by a mixture of differential equations and algebraic equations. Accordingly, singular systems have received much attention in the past few decades [12]. Many valuable results on singular FOSs have been reported too [13, 14, 15, 16]. Based on the Gronwall’s approach, the sufficient condition for the finite-time stability criterion was developed for stochastic singular FOS with [17]. With the idea of regularization, [18, 19] tried to transform singular FOSs into normal ones and then to control them. In contrast, the admissibility analysis and controller synthesis on singular FOSs with order lying in were comprehensively studied in a pioneering thesis [20]. On the basis of this work, some scholars solved some other related problems [21, 22]. To remove the equality constraint in admissibility criterion, Yu proposed a criterion in the form of pure linear matrix inequality (LMI) for the case [23]. With this LMI criterion without equality constraints, the corresponding control problem was done subsequently [24]. To reduce the number of decision matrix variables, Marir provided a more concise criterion [25]. However, it involves complex decision matrix variables. To overcome this deficiency, an elegant and efficient LMI criterion was derived by introducing the concept of fractional order positive definite matrix [26]. Similarly, an LMI criterion was presented from the region stability theory and the nonsingular decomposing technique [27]. Besides, Marir developed an admissible criterion for the case [28] which has the similar form with that in [23]. Since it is not practical or even impossible to access all the state, the partial state control problem of singular FOSs becomes meaningful. [28] studied the output feedback control problem for singular FOSs, while the LMI conditions in Theorem 3 are wrongly derived. The given criterion in [28] was used in observer based control problem [29]. [25] also studied the observer based control problem for the case, while Theorem 3 was also questionable. Motivated by the previous discussions, some observations can be reached. First, a criterion without inequality constraint, complex operations and many decision matrices is expected for observer based control. Nonetheless, the coupling phenomenon usually appears in such problem. Second, the sufficient and necessary condition for output feedback control is expected, since, to the best knowledge of the authors, the necessity is still an open problem for and . Third, a unified solution for both and cases is desirable, which will bring many theoretic and practical difficulties. In view of the above observations, this paper focuses on these challenging and essential problems.
The remainder of the paper is arranged as follows. Some preliminary results are provided along with the problem formulation in Section 2. In Section 3, the stabilization conditions of singular FOSs with two kinds of controllers are presented with rigorous proof. In Section 4, the effectiveness of our results is evaluated by two numerical examples. Finally, conclusions of this study are provided in Section 5.
Notations. is the transpose of matrix , is the inverse of matrix , is used to denote , is the determinant of matrix , denotes the rank of matrix , represents dimensional identity matrix, indicates the symmetric part of a matrix, such as \Big{[}{\begin{smallmatrix}A&B\\ *&C\end{smallmatrix}}\Big{]}=\Big{[}{\begin{smallmatrix}A&B\\ {{B^{\rm{T}}}}&C\end{smallmatrix}}\Big{]} where and , means the degree of polynomial and stands for the angle of a complex number .
2 Preliminaries
In this work, we consider the following singular FOS
[TABLE]
where is the pseudo semi-state, is the control input, is the measured output, which is just the mentioned partial measurable state, is the system commensurate order, is a singular matrix such that and and are constant matrices with appropriate dimensions.
The -th Caputo fractional derivative of is defined by [30]
[TABLE]
where , and is the Gamma function. Due to its good properties on Laplace transform and constant’s derivative, the Caputo definition is adopted throughout this paper [30].
Before moving on, the basic definitions [20] and relevant facts for singular FOSs are needed.
- i)
The pair is said to be regular if for . 2. ii)
The pair is said to be impulse free if . 3. iii)
The pair is said to be stable if all the finite eigenvalues of lie in .
The system (1) with is said to be admissible if is regular, impulse free and stable. The regularity guarantees the existence and uniqueness of a time-domain response to a given singular FOS, while non-impulsiveness ensures no infinite dynamical modes in such system. Stability corresponds to a convergent system output.
The -dimensional fractional order positive definite matrix set is defined by {\mathbb{P}^{n\times n}_{\alpha}}\triangleq\big{\{}\sin\big{(}{\frac{{\alpha\pi}}{2}}\big{)}X+\cos\big{(}{\frac{{\alpha\pi}}{2}}\big{)}Y:X,Y\in{\mathbb{R}^{n\times n}},\left[{\begin{smallmatrix}X&Y\\ {-Y}&X\end{smallmatrix}}\right]>0\big{\}} with . With the well defined matrix set, the following lemmas provide two dual sufficient and necessary criteria for the admissibility of system (1) with and .
Lemma 1**.**
[26]** The system (1) is admissible if and only if there exist matrices and , such that
[TABLE]
where , and .
Lemma 2**.**
[26]** The system (1) is admissible if and only if there exist matrices and , such that
[TABLE]
where , and .
3 Controller Design
3.1 Observer based control
Design the following observer based controller
[TABLE]
where is the estimation pseudo state, and are, respectively, observer gain and controller gain to be designed, such that the augmented system
[TABLE]
is admissible, where \bar{E}=\Big{[}{\begin{smallmatrix}E&{}\\ {}&E\end{smallmatrix}}\Big{]},~{}\bar{x}\left(t\right)=\Big{[}{\begin{smallmatrix}{x\left(t\right)}\\ {x\left(t\right)-\hat{x}\left(t\right)}\end{smallmatrix}}\Big{]} and \bar{A}=\Big{[}{\begin{smallmatrix}{A+BK}&{-BK}\\ 0&{A+LC}\end{smallmatrix}}\Big{]}.
In preparation for designing and , a useful property of is introduced here, which can be regarded as a generalization of statement viii) Theorem 1 in [6].
Theorem 1**.**
If , then for any with , one has .
Proof.
From the given condition of , there exist two matrices satisfying P=\sin\big{(}{\frac{{\alpha\pi}}{2}}\big{)}X+\cos\big{(}{\frac{{\alpha\pi}}{2}}\big{)}Y and . By defining , and , it follows
[TABLE]
where .
Additionally, the big matrix can be expressed as
[TABLE]
By using the singular value decomposition, one has
[TABLE]
where is a positive diagonal matrix, and are orthogonal matrices with appropriate dimensions.
Because the similarity transformation does not change the eigenvalue of the target matrix, then
[TABLE]
Considering that the order principal minor determinant of a positive definite matrix is still positive definite, one has
[TABLE]
From the fact that congruent transformation does not change the sign of the matrix eigenvalue, the desired result follows immediately
[TABLE]
Hence, one can say that . ∎
With the help of Lemmas 1, 2 and Theorem 1, the criterion on how to determine and can be presented.
Theorem 2**.**
Designing the controller (7) for system (1), the resulting closed-loop control system (8) is admissible if and only if there exist matrices , , , and , such that
[TABLE]
[TABLE]
where , , , , and the desired gains are given by
[TABLE]
[TABLE]
Proof.
The proof of this theorem can be presented from two aspects.
Sufficiency. From (16) and Lemma 2, it can be found that the system is admissible. By applying Lemma 1, there exist matrices and satisfying
[TABLE]
Formula (15) can be equivalently expressed as
[TABLE]
Hence, there exists a scalar , such that the following LMI holds
[TABLE]
for P=\Big{[}{\begin{smallmatrix}{{P_{1}}}&{}\\ {}&{\varepsilon{{\tilde{P}}_{2}}}\end{smallmatrix}}\Big{]}, Q=\Big{[}{\begin{smallmatrix}{{Q_{1}}}&{}\\ {}&{\varepsilon{{\tilde{Q}}_{2}}}\end{smallmatrix}}\Big{]} and {E_{0}}=\Big{[}{\begin{smallmatrix}{{E_{1}}}&{}\\ {}&{{E_{1}}}\end{smallmatrix}}\Big{]}. Therefore, under the conditions in Theorem 1, the resulting closed-loop control system (8) is admissible.
Necessity. It can be known from Lemma 1, if the system (8) is admissible, then there exist matrices , and with appropriate dimensions satisfying
[TABLE]
Without loss of generality, let us suppose those matrices satisfying P=\Big{[}{\begin{smallmatrix}{{P_{1}}}&{{P_{12}}}\\ {{P_{21}}}&{{P_{22}}}\end{smallmatrix}}\Big{]}, Q=\Big{[}{\begin{smallmatrix}{{Q_{1}}}&{{Q_{12}}}\\ {{Q_{21}}}&{{Q_{22}}}\end{smallmatrix}}\Big{]}, {{\bar{E}}_{1}}=\Big{[}{\begin{smallmatrix}{{E_{1}}}&0\\ 0&{{E_{1}}}\end{smallmatrix}}\Big{]} and . By adopting Theorem 1, it can obtain that if , then . Furthermore, one has
[TABLE]
which implies the inequality (15).
In a similar way, by using Lemma 2, it follows that if the system (8) is admissible, then there exist matrices , and with appropriate dimensions satisfying
[TABLE]
By assuming P=\Big{[}{\begin{smallmatrix}{{P_{11}}}&{{P_{12}}}\\ {{P_{21}}}&{{P_{2}}}\end{smallmatrix}}\Big{]}, Q=\Big{[}{\begin{smallmatrix}{{Q_{11}}}&{{Q_{12}}}\\ {{Q_{21}}}&{{Q_{2}}}\end{smallmatrix}}\Big{]}, {{\bar{E}}_{2}}=\Big{[}{\begin{smallmatrix}{{E_{2}}}&{}\\ {}&{{E_{2}}}\end{smallmatrix}}\Big{]} and , it becomes
[TABLE]
which leads to the inequality (16). All of the above discussions complete the proof of Theorem 2. ∎
Remark 1**.**
With the introduction of and , the coupling problem of multiple decision matrices has been solved well. Without adopting the Kronecker product, Theorem 2 is more concise than that in [24]. Compared with the result in [25], the proposed approach avoids the complex calculation successfully.
3.2 Output feedback control
The objective of this subsection is to design an output feedback controller
[TABLE]
such that the resulting closed-loop control system
[TABLE]
is admissible. First, one relevant lemma will be provided here, which will play a key role in dealing with the decoupling problem of matrix variables.
Lemma 3**.**
[31]* Let , and be given matrices with appropriate dimensions, thus*
[TABLE]
holds if and only if there exists an appropriate dimension matrix which satisfies
[TABLE]
Theorem 3**.**
Designing the controller (26) for system (1), the resulting closed-loop control system (27) is admissible, if and only if there exist matrices , , and , such that
[TABLE]
and the controller gain is given by
[TABLE]
where , , , and is an intermediate matrix derived from . The matrices , and satisfy the following LMI
[TABLE]
where , and .
Proof.
Sufficiency. Defining and , then (30) can be rewritten as (29). By applying Lemma 3, the equivalent conditions can be expressed as
[TABLE]
and
[TABLE]
Luckily, with the help of Lemma 2, the previous formula (34) clearly indicates that the closed-loop control system in (27) is admissible.
Necessity. Using Lemma 2, if the system (27) is admissible, then there exist matrices and satisfying
[TABLE]
Based on the basic property of open set, there must exist small positive number , such that
[TABLE]
When and , it follows
[TABLE]
Defining , one has
[TABLE]
By using the equivalence of formula (28) and formula (29), the desirable result (30) can be deduced immediately from formulas (35) and (38).
Note that, formula (38) means the following system
[TABLE]
is admissible. By adopting Lemma 1, one can conclude that there must exist matrices and satisfying
[TABLE]
Setting , (32) follows from (40) immediately.
All of these complete the proof of Theorem 3. ∎
Remark 2**.**
Although [28] has studied the output feedback control problem for singular FOS with , the main result in Theorem 3 is questionable. With the introduction of relaxation matrix , the coupling problem of decision matrices has been solved. Notably, a sufficient and necessary condition is systematically proposed for constructing output feedback controller. The proposed result in this study can not only solve the static output feedback problem but also solve the dynamic output feedback problem. The interested readers can refer to the reference [19].
3.3 Implementing strategy
From [12], it can be found that if the pair in (1) is regular, then there exist two invertible matrices satisfying
[TABLE]
where .
Defining \tilde{x}\left(t\right)=\big{[}{\begin{smallmatrix}{{x_{a}}\left(t\right)}\\ {{x_{b}}\left(t\right)}\end{smallmatrix}}\big{]}\triangleq Nx\left(t\right),\tilde{B}=\big{[}{\begin{smallmatrix}{{B_{1}}}\\ {{B_{2}}}\end{smallmatrix}}\big{]}\triangleq{M^{-1}}B, then the system in (1) can be rewritten as
[TABLE]
Let us record and . Then the algebraic equation and the differential equation in (42) can be equivalently expressed as
[TABLE]
[TABLE]
Note that is governed by a regular fractional order differential equation and can be calculated from and directly. Theorem 2 and Theorem 3 are both applicable to the case of . In this case, the investigated singular fractional order control system can be implemented successfully with the methods in [10]. Actually, when , reduces to the classical positive definite matrix set and the obtained results still hold. The corresponding implementation problem can be regarded as a special case of the previous one.
Because the fundamental Lemma 1 and Lemma 2 require , some measures should be taken specially for . For any , an auxiliary system can be built as
[TABLE]
Due to the fact that the transfer function of the system (1) is equivalent to that of the system (45), namely,
[TABLE]
and the initial conditions of linear singular FOSs do not affect their admissibility. Note that for , and therefore the admissibility of system (1) can be determined from the system (45). In other words, the procedure for dealing with the system with can be summarized as follows. i) With the help of the model transform in (45), then an auxiliary system can be constructed. ii) By applying Theorem 2 or Theorem 3, the needed controller can be designed. iii) By using the model transform in (42), an easy to implement model can be obtained. Although the presented criteria are suitable for both and , the main results are not independent of since the critical set is relevant to .
Besides the Caputo derivative, the following Riemann–Liouville derivative is also widely used
[TABLE]
where and . It has shown that an FOS with Caputo derivative and Riemann–Liouville derivative are equivalent in the form of infinite dimensional state space model except the initial conditions [10]. Additionally, the initial conditions do not affect the admissibility. As a result, the elaborated approaches still can be extended to the Riemann–Liouville case.
Remark 3**.**
Before ending this main results section, it is worth mentioning the main contributions of this work. i) An essential property on fractional order positive definite matrix is derived, which plays an important role in the sequel. ii) A sufficient and necessary condition for designing observer based controller is proposed, which needs fewer real decision matrices. iii) A sufficient and necessary condition for designing output feedback controller is developed, which is the first time to give such a complete condition. iv) After clearly providing the implementing strategy, the results are extended to the case of .
4 Numerical Example
In this section, we provide two numerical examples to illustrate the applicability of the proposed method. To enhance the persuasion, consider the benchmark system from [28] as follows
[TABLE]
which has been shown as regular, impulse free and unstable with zero input. To guarantee the system state change smoothly, a zero input should be provided at , thus and are initialized. To make the equation (48) hold without input, [{\begin{array}[]{*{20}{c}}{4}&{1}&{-4}\end{array}}]x(t)=0 is expected. Without loss of generality, let us configure the initial pseudo state as x(0)=[{\begin{array}[]{*{20}{c}}{-0.25}&{2}&{0.25}\end{array}}]^{\rm T}.
Example 1**.**
Consider the singular FOS (48) with . Firstly, , , E_{1}=[{\begin{array}[]{*{20}{c}}{0}&{1}&{-1}\end{array}}]^{\rm T} and E_{2}=[{\begin{array}[]{*{20}{c}}{0}&{0}&{1}\end{array}}] are chosen to satisfy , and . The initial condition of the observer is set as \hat{x}(0)=[{\begin{array}[]{*{20}{c}}{0}&{0}&{0}\end{array}}]^{\rm T}. Then, by applying Theorem 2, the needed controller gain and observer gain can be obtained as
[TABLE]
respectively. To confirm the effectiveness of the obtained results, the curves of the system state and the control input are given in Fig. 1 and Fig. 2, respectively.
The admissibility of the closed-loop control system in (8) can be seen clearly \textcolor[rgb]0,0,1from these two figures. Additionally, the convergence speed is slowly as claimed in [30] and is approximately equal to . From the enlarged view, it can be observed that the initial conditions coincide with the setting value. To show the observation performance clearly, the observation error is defined as and its curve is displayed in Fig. 3, which clearly demonstrates the validity of the designed observer. It can be found that the initial observation error equals to , since zero initial conditions are exerted on the developed observer.
From Theorem 3, the feasible controller gains can be obtained as follows
[TABLE]
The time response of the closed-loop control system (27) with output feedback control law (26) is illustrated in Fig. 4 and the corresponding control input is \textcolor[rgb]0,0,1shown in Fig. 5, which \textcolor[rgb]0,0,1reveals that the resulting system is admissible and its state converge to zero as . Note that the initial value of indeed appears as predefined.
Example 2**.**
Consider the singular FOS (48) with the related parameters . is selected for the model transform scheme in (45). The corresponding matrices can be designed in accordance with the principles of Example 1. To ensure the admissability of the closed-loop system, the feasible parameters are designed as
[TABLE]
It should point out that with the help of (45), the desired controller is designed while the simulation is performed on the original system (48) with . Because , an additional initial condition \dot{x}(0)=[{\begin{array}[]{*{20}{c}}{0}&{0}&{0}\end{array}}]^{\rm T} is given except . The time response of the closed-loop systems (8) with the designed controller is illustrated in Fig. 6, the corresponding control input is given in Fig. 7, and the state observation performance is provided in Fig. 8. All of these show that the observer and the corresponding controller perform well. For the output feedback control case, the time response of the closed-loop system (27) is plotted in Fig. 9, and the corresponding control input is given in Fig. 10, which show that it is asymptotically stable and its states converge to zero gradually. Additionally, compared with the case, in the case of converge more rapidly with comparable control, while the overshoot occur as expected. All the conducted simulations study shows the effectiveness of the proposed control scheme.
5 Conclusions
In this paper, the stabilization issue of singular fractional order systems with partial state feedback has been studied. By the aid of the admissibility criteria we proposed before, two sufficient and necessary criteria are derived for the observer based control case and the output feedback control case, respectively. The results are expressed in terms of LMI, which are convenient to use. Furthermore, the applicability and implementation are discussed. Numerical simulation has shown the effectiveness of the theoretic results obtained. It is believed that this study provides a promising way to solve such problems of singular fractional order systems.
Acknowledgements
The work described in this paper was supported by the National Natural Science Foundation of China (61601431, 61573332), the Anhui Provincial Natural Science Foundation (1708085QF141), the fund of China Scholarship Council (201806345002), the Fundamental Research Funds for the Central Universities (WK2100100028) and the General Financial Grant from the China Postdoctoral Science Foundation (2016M602032).
References
- Mathiyalagan et al. [2015]
K. Mathiyalagan, J. H. Park, R. Sakthivel,
Exponential synchronization for fractional-order chaotic systems with mixed uncertainties,
Complexity 21 (2015) 114–125.
- Zou and Xiang [2017]
W. Zou, Z. Xiang,
Containment control of fractional-order nonlinear multi-agent systems under fixed topologies,
IMA Journal of Mathematical Control and Information 35 (2017) 1027–1041.
- Sun et al. [2018]
H. Sun, Y. Zhang, D. Baleanu, W. Chen, Y. Chen,
A new collection of real world applications of fractional calculus in science and engineering,
Communications in Nonlinear Science and Numerical Simulation 64 (2018) 213–231.
- Cui et al. [2017]
R. Cui, Y. Wei, Y. Chen, S. Cheng, Y. Wang,
An innovative parameter estimation for fractional-order systems in the presence of outliers,
Nonlinear Dynamics 89 (2017) 453–463.
- Cheng et al. [2018]
S. Cheng, Y. Wei, D. Sheng, Y. Chen, Y. Wang,
Identification for Hammerstein nonlinear ARMAX systems based on multi-innovation fractional order stochastic gradient,
Signal Processing 142 (2018) 1–10.
- Wei et al. [2017]
Y. Wei, Y. Chen, S. Cheng, Y. Wang,
Completeness on the stability criterion of fractional order LTI systems,
Fractional Calculus and Applied Analysis 20 (2017) 159–172.
- Huang and Xiang [2016]
S. Huang, Z. Xiang,
Stability of a class of fractional-order two-dimensional non-linear continuous-time systems,
IET Control Theory Applications 10 (2016) 2559–2564.
- Sheng et al. [2017]
D. Sheng, Y. Wei, S. Cheng, J. Shuai,
Adaptive backstepping control for fractional order systems with input saturation,
Journal of the Franklin Institute 354 (2017) 2245–2268.
- Chen et al. [2018]
Y. Chen, Y. Wei, Y. Wang,
On 2 types of robust reaching laws,
International Journal of Robust and Nonlinear Control 28 (2018) 2651–2667.
- Wei et al. [2016]
Y. Wei, P. W. Tse, B. Du, Y. Wang,
An innovative fixed-pole numerical approximation for fractional order systems,
ISA Transactions 62 (2016) 94–102.
- Stanisławski et al. [2017]
R. Stanisławski, M. Rydel, K. J. Latawiec,
Modeling of discrete-time fractional-order state space systems using the balanced truncation method,
Journal of the Franklin Institute 354 (2017) 3008–3020.
- Duan [2010]
G. Duan, Analysis and Design of Descriptor Linear Systems, Springer, New York, 2010.
- Yin et al. [2015]
C. Yin, S. M. Zhong, X. Huang, Y. Cheng,
Robust stability analysis of fractional-order uncertain singular nonlinear system with external disturbance,
Applied Mathematics and Computation 269 (2015) 351–362.
- Liu et al. [2016]
S. Liu, X. Zhou, X. Li, W. Jiang,
Stability of fractional nonlinear singular systems and its applications in synchronization of complex dynamical networks,
Nonlinear Dynamics 84 (2016) 1–9.
- Lazarević and Tzekis [2016]
M. P. Lazarević, P. Tzekis,
Robust second-order PDα formula type iterative learning control for a class of uncertain fractional order singular systems,
Journal of Vibration and Control 22 (2016) 2004–2018.
- Jmal et al. [2018]
A. Jmal, O. Naifar, A. B. Makhlouf, N. Derbel, M. A. Hammami,
Sensor fault estimation for fractional-order descriptor one-sided Lipschitz systems,
Nonlinear Dynamics 91 (2018) 1713–1722.
- Mathiyalagan and Balachandran [2016]
K. Mathiyalagan, K. Balachandran,
Finite-time stability of fractional-order stochastic singular systems with time delay and white noise,
Complexity 21 (2016) 370–379.
- N’Doye et al. [2013]
I. N’Doye, M. Darouach, M. Zasadzinski, N. E. Radhy,
Robust stabilization of uncertain descriptor fractional-order systems,
Automatica 49 (2013) 1907–1913.
- Wei et al. [2017]
Y. Wei, P. W. Tse, Z. Yao, Y. Wang,
The output feedback control synthesis for a class of singular fractional order systems,
ISA Transactions 69 (2017) 1–9.
- Xu [2009]
J. Xu, Study on Some Problems in Analysis and Control of Fractional-order Systems, Master’s thesis, Shanghai Jiao Tong University, Shanghai, 2009.
- N’Doye et al. [2010]
I. N’Doye, M. Zasadzinski, M. Darouach, N. E. Radhy,
Stabilization of singular fractional-order systems: an LMI approach,
in: the 18th IEEE Mediterranean Conference on Control and Automation (MCCA 2010), Marrakech, Morocco, 2010, pp. 209–213.
- Song et al. [2012]
X. Song, L. Liu, Z. Wang,
Stabilization of singular fractional-order systems: a linear matrix inequality approach,
in: 2012 IEEE International Conference on Automation and Logistics (ICAL 2012), Zhengzhou, China, 2012, pp. 19–23.
- Yu et al. [2013]
Y. Yu, Z. Jiao, C. Y. Sun,
Sufficient and necessary condition of admissibility for fractional-order singular system,
Acta Automatica Sinica 39 (2013) 2160–2164.
- Ji and Qiu [2015]
Y. Ji, J. Qiu,
Stabilization of fractional-order singular uncertain systems,
ISA Transactions 56 (2015) 53–64.
- Marir et al. [2017]
S. Marir, M. Chadli, D. Bouagada,
A novel approach of admissibility for singular linear continuous-time fractional-order systems,
International Journal of Control, Automation and Systems 15 (2017) 959–964.
- Wei et al. [2016]
Y. Wei, B. Du, Y. Chen, S. Cheng, Y. Wang,
Necessary and sufficient admissibility condition of singular fractional order systems,
in: the 35th Chinese Control Conference (CCC 2016), Chengdu, China, 2016, pp. 85–88.
- Zhang and Chen [2018]
X. Zhang, Y. Q. Chen,
Admissibility and robust stabilization of continuous linear singular fractional order systems with the fractional order : the case,
ISA Transactions 82 (2018) 42–50.
- Marir et al. [2016]
S. Marir, M. Chadli, D. Bouagada,
New admissibility conditions for singular linear continuous-time fractional-order systems,
Journal of the Franklin Institute 354 (2016) 752–766.
- Lin et al. [2018]
C. Lin, B. Chen, P. Shi, J. Pengyu,
Necessary and sufficient conditions of observer-based stabilization for a class of fractional-order descriptor systems,
Systems and Control Letters 112 (2018) 31–35.
- Monje et al. [2010]
C. A. Monje, Y. Q. Chen, B. M. Vinagre, D. Y. Xue, V. Feliu-Batlle, Fractional-order Systems and Controls: Fundamentals and Applications, Springer, London, 2010.
- Saadni et al. [2006]
S. M. Saadni, M. Chaabane, D. Mehdi,
Robust stability and stabilization of a class of singular systems with multiple time-varying delays,
Asian Journal of Control 8 (2006) 1–11.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Mathiyalagan et al. [2015] K. Mathiyalagan, J. H. Park, R. Sakthivel, Exponential synchronization for fractional-order chaotic systems with mixed uncertainties, Complexity 21 (2015) 114–125.
- 2Zou and Xiang [2017] W. Zou, Z. Xiang, Containment control of fractional-order nonlinear multi-agent systems under fixed topologies, IMA Journal of Mathematical Control and Information 35 (2017) 1027–1041.
- 3Sun et al. [2018] H. Sun, Y. Zhang, D. Baleanu, W. Chen, Y. Chen, A new collection of real world applications of fractional calculus in science and engineering, Communications in Nonlinear Science and Numerical Simulation 64 (2018) 213–231.
- 4Cui et al. [2017] R. Cui, Y. Wei, Y. Chen, S. Cheng, Y. Wang, An innovative parameter estimation for fractional-order systems in the presence of outliers, Nonlinear Dynamics 89 (2017) 453–463.
- 5Cheng et al. [2018] S. Cheng, Y. Wei, D. Sheng, Y. Chen, Y. Wang, Identification for Hammerstein nonlinear ARMAX systems based on multi-innovation fractional order stochastic gradient, Signal Processing 142 (2018) 1–10.
- 6Wei et al. [2017] Y. Wei, Y. Chen, S. Cheng, Y. Wang, Completeness on the stability criterion of fractional order LTI systems, Fractional Calculus and Applied Analysis 20 (2017) 159–172.
- 7Huang and Xiang [2016] S. Huang, Z. Xiang, Stability of a class of fractional-order two-dimensional non-linear continuous-time systems, IET Control Theory & \& Applications 10 (2016) 2559–2564.
- 8Sheng et al. [2017] D. Sheng, Y. Wei, S. Cheng, J. Shuai, Adaptive backstepping control for fractional order systems with input saturation, Journal of the Franklin Institute 354 (2017) 2245–2268.