Helicoids and Catenoids in $M\times\mathbb{R}$
Ronaldo F. de Lima, Pedro Roitman

TL;DR
This paper explores the construction and properties of minimal hypersurfaces called vertical helicoids and catenoids in product manifolds, extending classical Euclidean examples to more general Riemannian manifolds.
Contribution
It introduces the concepts of vertical helicoids and catenoids in arbitrary Riemannian manifolds and characterizes their existence and uniqueness properties, extending classical minimal surface theory.
Findings
Vertical helicoids have similar uniqueness properties as in Euclidean space.
Vertical catenoids exist iff the manifold admits isoparametric hypersurfaces.
Complete classification of constant angle hypersurfaces in $M\times\mathbb{R}$.
Abstract
Given an arbitrary Riemannian manifold , we consider the problem of introducing and constructing minimal hypersurfaces in which have the same fundamental properties of the standard helicoids and catenoids of Euclidean space . Such hypersurfaces are defined by imposing conditions on their height functions and horizontal sections, and then called and . We establish that vertical helicoids in have the same fundamental uniqueness properties of the helicoids in We provide several examples of vertical helicoids in the case where is one of the simply connected space forms. Vertical helicoids which are entire graphs of functions on and are also presented. We give a local characterization of hypersurfaces…
Click any figure to enlarge with its caption.
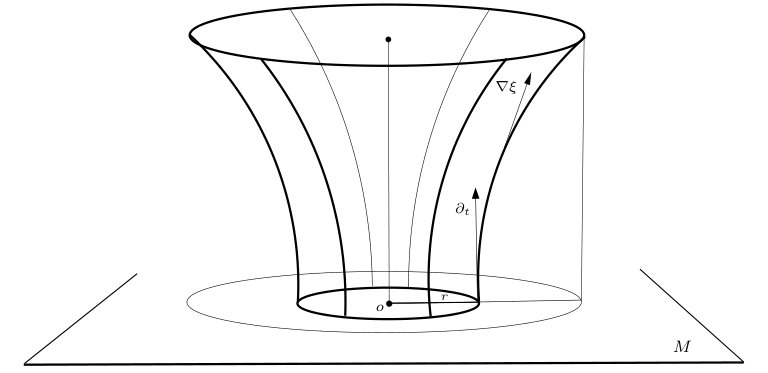 Figure 1
Figure 1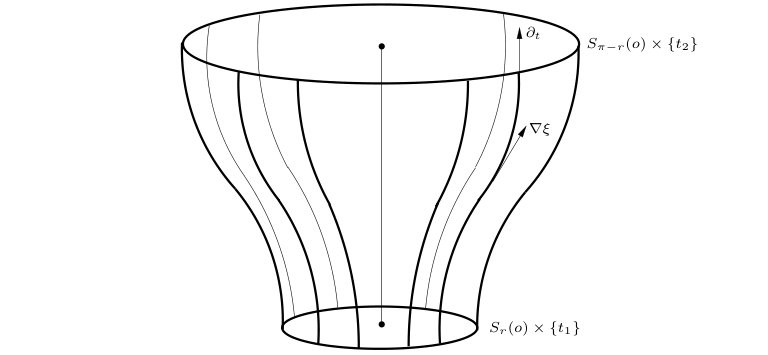 Figure 2
Figure 2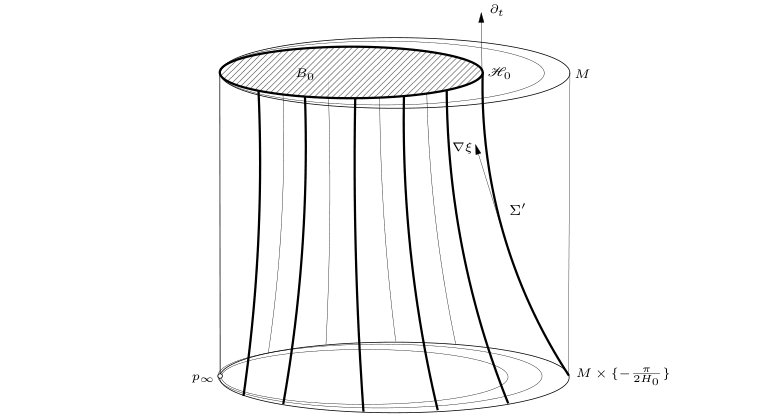 Figure 3
Figure 3Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Helicoids and Catenoids in
Ronaldo F. de Lima and Pedro Roitman
Departamento de Matemática - Universidade Federal do Rio Grande do Norte
Departamento de Matemática - Universidade de Brasília
Abstract.
Given an arbitrary Riemannian manifold , we consider the problem of introducing and constructing minimal hypersurfaces in which have the same fundamental properties of the standard helicoids and catenoids of Euclidean space . Such hypersurfaces are defined by imposing conditions on their height functions and horizontal sections, and then called vertical helicoids and vertical catenoids. We establish that vertical helicoids in have the same fundamental uniqueness properties of the helicoids in We provide several examples of properly embedded vertical helicoids in the case where is one of the simply connected space forms. Vertical helicoids which are entire graphs of functions on and are also presented. We show that vertical helicoids of whose horizontal sections are totally geodesic in are locally given by a ”twisting” of a fixed totally geodesic hypersurface of We give a local characterization of hypersurfaces of which have the gradient of their height functions as a principal direction. As a consequence, we prove that vertical catenoids exist in if and only if admits families of isoparametric hypersurfaces. If so, properly embedded vertical catenoids can be constructed through the solutions of a certain first order linear differential equation. Finally, we give a complete classification of the hypersurfaces of whose angle function is constant.
Key words and phrases:
helicoid – catenoid – product space.
2010 Mathematics Subject Classification:
53B25 (primary), 53C24, 53C42 (secondary).
1. Introduction
In this paper, we address the problem of defining and constructing minimal hypersurfaces in with special properties, where is an arbitrary Riemannian manifold. We will focus our attention on those fundamental properties of the standard helicoids and catenoids of Euclidean space so that the corresponding minimal hypersurfaces of will be called vertical helicoids and vertical catenoids.
More specifically, these hypersurfaces will be introduced by imposing conditions on their horizontal sections (intersections with ), and also on the trajectories of the gradient of their height functions (height trajectories, for short). Vertical helicoids, for instance, are defined as those hypersurfaces of whose horizontal sections are minimal hypersurfaces of , and whose height trajectories are asymptotic lines. Vertical catenoids, in turn, have nonzero constant mean curvature hypersurfaces as horizontal sections, and lines of curvature as height trajectories.
In this setting, we show that vertical helicoids of have all the classical uniqueness properties of the standard helicoids of . Namely, they are minimal hypersurfaces of and, as such, they are the only ones which are foliated by horizontal minimal hypersurfaces. They are also the only minimal local graphs of harmonic functions (defined on domains in ), and the only minimal non totally geodesic hypersurfaces of whose spacelike pieces are maximal with respect to the standard Lorentzian product metric of .
This last property extends the analogous classical result, set in Lorentzian space established by O. Kobayashi [14]. In our approach, we briefly consider the class of hypersurfaces of whose mean curvatures with respect to both the Riemannian and Lorentzian metrics of coincide. We call them mean isocurved. These hypersurfaces have been studied by Albujer-Caballero [4] in the case where the ambient space is (see [1] as well). Actually, during the preparation of this paper, we became acquainted with the recent works by Alarcón-Alias-Santos [2] and Albujer-Caballero [3] which have some overlapping with ours on this subject. Mean isocurved surfaces in and have also been considered by Kim et al in [13].
Concerning examples of vertical helicoids in , we show that they can be constructed by considering one-parameter groups of isometries of acting on suitable minimal hypersurfaces. When is one of the simply connected space forms, this method allows us to construct properly embedded minimal vertical helicoids in which are foliated by vertical translations of totally geodesic hypersurfaces of We also construct properly embedded vertical helicoids in and which are foliated by vertical translations of helicoids of and respectively. In the same way, we construct vertical helicoids in where is a Berger sphere. Finally, we obtain a family of properly embedded minimal vertical helicoids in which are foliated by -dimensional Clifford tori, and also a corresponding family of vertical helicoids in (previously constructed by Choe and Hoppe [7]), whose horizontal sections are the cones of these tori in
Other examples of vertical helicoids that we give are graphs of harmonic and horizontally homothetic functions defined on domains of certain manifolds such as the Nil and Sol 3-dimensional spaces (see Section 4.1). We remark that, all the vertical helicoids presented here, graphs or not, contain spacelike zero mean isocurved open sets.
We also give a local characterization of vertical helicoids of with totally geodesic horizontal sections and nonvanishing angle function by showing that each of its points has a neighborhood which can be expressed as a “twisting” of a totally geodesic hypersurface of (see Section 4.2 for more details).
Regarding vertical catenoids in , their study naturally leads to the consideration of a broader class of hypersurfaces of those which have the gradient of their height functions as a principal direction. These hypersurfaces have been given a local characterization by R. Tojeiro [20] assuming that is one of the simply connected space forms. Here, we extend this result to general products and conclude that a necessary and sufficient condition for the existence of minimal or constant mean curvature (CMC) hypersurfaces in with this property (in particular, vertical catenoids) is that admits families of isoparametric hypersurfaces.
This extension of Tojeiro’s result, in fact, provides a way of constructing such minimal and CMC hypersurfaces (as long as they are admissible) by solving a first order linear differential equation. This can be performed, for instance, when is any of the simply connected space forms, a Damek-Ricci space or any of the simply connected 3-homogeneous manifolds with isometry group of dimension 4: This result will also be applied for constructing properly embedded vertical catenoids in when is a Hadamard manifold or the sphere As a further application, we give a complete classification of hypersurfaces of whose angle function is constant.
The paper is organized as follows. In Section 2, we set some notation and formulae. In Section 3, we introduce mean isocurved hypersurfaces and establish some basic lemmas. We discuss on vertical helicoids in Section 4. In Section 5, we consider hypersurfaces of which have the gradient of their height functions as a principal direction. Finally, in Section 6, we discuss on vertical catenoids.
2. Preliminaries
Throughout this paper, will denote an arbitrary -dimensional Riemannian manifold. For such an we will consider the product manifold with its standard differentiable structure. We will set for the tangent bundle of where and stand for the tangent bundles of and respectively. We will endow with the Riemannian product metric:
[TABLE]
We shall write and for the projection of on its first and second factors, respectively, and for the gradient of with respect to the Riemannian metric We remark that is a parallel field on
Let be an orientable hypersurface of Given a unit normal field we will denote by the shape operator of relative to that is,
[TABLE]
where stands for the Levi-Civita connection of . The gradient of a differentiable function on will be denoted by
The height function and the angle function of are defined as
[TABLE]
Regarding these functions, the following fundamental identities hold:
[TABLE]
where the second one follows from the fact that is parallel in We point out that and that is a critical point of the height function if and only if If so, we say that is a horizontal point of Any field will be called horizontal as well.
3. Basic Lemmas
Given a product manifold for each we will call the submanifold a horizontal section of If intersects a horizontal section transversally, we call the set
[TABLE]
a horizontal section of the hypersurface
Notice that, for all is isometric to and that any horizontal section is a hypersurface of . In this setting, it is easily checked that
[TABLE]
is a well defined unit normal field to .
Now, denote the shape operator of with respect to by , and set and for the (non normalized) mean curvature functions of and , respectively.
Lemma 1**.**
Let be a horizontal section of a hypersurface of Then
[TABLE]
As a consequence, for , the following equality holds along :
[TABLE]
Proof.
We have that is totally geodesic in Hence, its Riemannian connection coincides with the restriction of the Riemannian connection of to . Therefore, for all , we have
[TABLE]
Thus, for all ,
[TABLE]
Now, in a suitable neighborhood of an arbitrary point on , consider an orthonormal frame such that are all tangent to . Then, on , we have
[TABLE]
which concludes the proof. ∎
3.1. Mean Isocurved Hypersurfaces
Let us consider in the Lorentzian product metric, which is defined as
[TABLE]
This metric relates to the Riemannian metric of through the identity
[TABLE]
which, as one can verify, is valid for all
Denote by a hypersurface of with the induced Lorentzian metric of We say that is spacelike if is a Riemannian manifold, that is, the Lorentzian metric on is positive definite. It is easily checked that is spacelike if and only if for all nonzero local field Also, any spacelike hypersurface of is necessarily orientable.
Assuming spacelike, choose a unit normal to , that is,
[TABLE]
It is a well known fact that the connections of with respect to the Riemannian and Lorentzian metrics coincide. So, keeping the notation of Section 2, we define the Lorentzian shape operator of with respect to as
[TABLE]
Finally, the (non normalized) Lorentzian mean curvature of is defined as
[TABLE]
Definition 1**.**
A spacelike hypersurface is said to be mean isocurved if its Riemannian and Lorentzian mean curvature functions, and , coincide. When we say that is zero mean isocurved.
Let us consider the following map
[TABLE]
which is easily seen to be an involution, that is, is the identity map of Moreover, for all the following identities hold:
[TABLE]
Given an oriented hypersurface with unit normal it follows from the second relation in (6) that is a Lorentzian normal field on Indeed,
[TABLE]
Moreover, considering also the equality (4), we have
[TABLE]
from which we conclude that is spacelike if and only if If so, set
[TABLE]
and write for the shape operator of with respect to
Lemma 2**.**
Let be a spacelike hypersurface of with no horizontal points. With the above notation, the following identities hold:
- i)
**
- ii)
**
Proof.
Given one has
[TABLE]
which proves (i).
Now, let us consider a point and a basis of which is orthonormal with respect to the Riemannian metric . Since is non horizontal, we can assume that are horizontal, i.e., tangent to and Hence, by (4), is orthonormal with respect to the Lorentzian metric , and
Denote by and the matrices of the shape operators and , respectively, with respect to the basis From (i), we have
[TABLE]
Also, for any index one has
[TABLE]
[TABLE]
This, together with (8), yields
[TABLE]
Putting (7) and (9) together, we have
[TABLE]
which implies that
[TABLE]
Since we have and the identity (10) clearly implies (iii). ∎
The following result extends [4, Theorem 4], set in Lorentzian space to hypersurfaces in
Corollary 1**.**
Let be a mean isocurved hypersurface of Then, its second fundamental form is nowhere definite. Furthermore, is semi-definite at if and only if is totally geodesic at
Proof.
Let us denote by the set of critical points of the height function of Keeping the notation of the proof of the preceding lemma, and considering the equality (10), we have that on for Thus,
[TABLE]
However, and Hence, the equality (11) implies that, at a point in the closure of in is neither definite nor semi-definite, unless, in the latter case, it vanishes.∎
4. Vertical Helicoids in
Inspired by some fundamental properties of the standard helicoids of (see Example 1 below), we introduce in this section the concept of vertical helicoid in . We shall establish the uniqueness properties of these hypersurfaces and present a variety of examples, as we mentioned in the introduction. In addition, we will characterize the vertical helicoids which are graphs of functions on and give a local characterization of vertical helicoids whose horizontal sections are totally geodesic in
Definition 2**.**
Let be a hypersurface of with no horizontal points and nonconstant angle function. We say that is a vertical helicoid if it satisfies the following conditions:
- •
The horizontal sections are minimal hypersurfaces of
- •
is an asymptotic direction of that is, on
Remark 1**.**
Considering the standard helicoids in one could expect that a right extension of this concept to the context of products should ask for the horizontal sections to be totally geodesic, since the horizontal sections of the helicoids in are straight lines. However, as our results and examples shall show, the appropriate condition to be imposed to the horizontal sections is, in fact, minimality, as in the above definition.
Remark 2**.**
The identity implies that is an asymptotic direction of if and only if the equality holds on In this case, we have that is constant along any trajectory of However, which gives that the tangent directions make a constant angle with the vertical direction Therefore, considering the concept of helix in as a curve which makes a constant angle with a given direction, we can extend it to curves in in an obvious way and conclude that the trajectories of on a vertical helicoid in are vertical helices.
In what follows, let denote the simply connected -space form of constant sectional curvature that is, the Euclidean space (), the -sphere (), or the hyperbolic space ().
Example 1** (Helicoids in ).**
Consider the following parametrization of the standard vertical helicoid of with pitch
[TABLE]
As its Riemannian unit normal field, we can choose
[TABLE]
which gives
Since is an orthogonal parametrization and depends only on we have that is parallel to In particular,
[TABLE]
Hence, is an asymptotic direction of
We also have that all horizontal sections of are straight lines. Therefore, is a vertical helicoid as in Definition 2. Moreover, from the equality
[TABLE]
we conclude that the open subset is spacelike and, as is well known, zero mean isocurved (see, e.g., [14]).
Considering the standard inclusions and we can apply an analogous reasoning to the parametrizations (see, e.g., [8, Section 4]):
[TABLE]
and conclude that their images are vertical helicoids in and respectively. They are both minimal surfaces containing open spacelike zero mean isocurved subsets, as verified in [13].
We prove now, as suggested by the above examples, that vertical helicoids in product spaces are minimal hypersurfaces. As such, except for some constant angle hypersurfaces, they are the only ones foliated by horizontal minimal hypersurfaces. Moreover, spacelike pieces of vertical helicoids (if any) are zero mean isocurved hypersurfaces in , and they are unique with respect to this property as well.
Theorem 1**.**
Let be a hypersurface of with no horizontal points and nonconstant angle function. Then, the following statements are equivalent:
- i)
* is a vertical helicoid.*
- ii)
* and all the horizontal sections are minimal hypersurfaces.*
If, in addition, is spacelike, then both (i) and (ii) are equivalent to:
- iii)
* is zero mean isocurved.*
Proof.
(i) (ii): Since we are assuming that is a vertical helicoid, we have for all horizontal sections and on Thus, from the identity (3) in Lemma 1, that is, is minimal.
(ii) (i): Now, we have for any horizontal section In this case, (3) yields which implies that is an asymptotic direction, that is, is a vertical helicoid.
(ii) (iii): We have and, as above, Hence, by Lemma 2-(iii), i.e., is zero mean isocurved.
(iii) (ii): From and Lemma 2-(iii), one has This, together with identity (3), gives that the horizontal sections are minimal hypersurfaces of Hence, is a vertical helicoid. ∎
Vertical helicoids can be constructed by “twisting” minimal hypersurfaces, as shown in the following examples.
Example 2** (Twisted planes in ).**
Given consider the map
[TABLE]
which we call a vertical twisting of the plane in It is easily verified that is a parametrization of a properly embedded hypersurface of . Also, direct computations give that
[TABLE]
is a unit normal field on . In particular, depends only on and that is, has no critical points on Also, the inverse matrix of the first fundamental form of in this parametrization is
[TABLE]
Therefore,
[TABLE]
Thus, is a (minimal) vertical helicoid, since its horizontal sections are planes of Moreover, its angle function satisfies
[TABLE]
which implies that the nonempty open subset of given by
[TABLE]
is spacelike. So, by Theorem 1, is zero mean isocurved in
Example 3** (Twisted helicoids in ).**
Let us consider now the map
[TABLE]
Clearly is a properly embedded hypersurface of which we call a twisted helicoid. A unit normal field to is
[TABLE]
so that Again, we have and
[TABLE]
which yields
Since, by construction, the horizontal sections of are two-dimensional helicoids in we conclude from the above that is a vertical helicoid in Moreover, if then the set
[TABLE]
is easily seen to be spacelike and, so, zero mean isocurved.
Now, define the functions by
[TABLE]
Applying induction on and proceeding as above, one concludes that the map
[TABLE]
parametrizes a properly embedded minimal vertical helicoid whose horizontal sections are vertical helicoids in Furthermore, for contains open spacelike zero mean isocurved subsets.
Example 4** (Twisted Clifford torus in ).**
Given consider the immersion
[TABLE]
defined by the equality
[TABLE]
Then, is proper and embedded in A computation shows that
[TABLE]
is a unit normal to which implies that its angle function is given by
[TABLE]
Also, the matrix of the first fundamental form of is
[TABLE]
In particular, for its inverse we have that since the corresponding cofactors of clearly vanish. This, together with the fact that depends only on gives that
[TABLE]
for is a horizontal vector. Therefore, is an asymptotic direction of Observing that each horizontal section of is a Clifford torus, which is a compact embedded minimal hypersurface of we conclude that is a properly embedded minimal vertical helicoid of
Finally, we have that the angle function of satisfies
[TABLE]
Hence, if we assume we have that the open set
[TABLE]
is nonempty and zero mean isocurved in
Example 5** (Twisted hyperbolic helicoid in ).**
Consider the Lorentzian model of hyperbolic space It is well known that the map
[TABLE]
parametrizes a properly embedded minimal surface which is called the hyperbolic helicoid of Considering its twisting defined, for by
[TABLE]
we have that the hypersurface is proper and embedded in A unit normal field for is given by
[TABLE]
where . Therefore, the angle function of is which depends only on
Proceeding as before, one easily concludes that is horizontal, i.e., that is an asymptotic direction of Hence, is a properly embedded minimal vertical helicoid in whose horizontal sections are hyperbolic helicoids of Also, for sufficiently large , contains open spacelike zero mean isocurved subsets.
Example 6** (Twisted helicoid in ).**
Consider the product , where the first factor is a Berger sphere. It is well known that, given the map
[TABLE]
is a parametrization of a minimal helicoid of (see, for instance, [19]).
From this helicoid, using the same twisting method of the previous examples, we obtain a vertical helicoid in that is given by
[TABLE]
To see that is indeed a vertical helicoid, it suffices to compute the angle function and check that its gradient is horizontal. After a long but straightforward computation, can be written as
[TABLE]
where is given by
[TABLE]
From these expressions, and after some further computations, we get that is horizontal. Also, for a convenient choice of the parameters , and of the range of and , is a spacelike immersion.
4.1. Vertical Helicoids as Graphs
Let be a differentiable (i.e., ) function defined on a domain It is easily checked that
[TABLE]
is a unit normal to , where, by abuse of notation, we are writing instead of In particular,
[TABLE]
is the angle function of
Denoting by the divergence of fields on as is well known, is a minimal hypersurface of if and only if satisfies the equation
[TABLE]
Lemma 3**.**
Let be the graph of a differentiable function on a domain , and let be a horizontal section of Then, the following hold:
- i)
* is minimal in if and only if satisfies:*
[TABLE]
- ii)
The mean curvature of is given by:
[TABLE]
Proof.
Given a differentiable function on it is an elementary fact that
[TABLE]
Then, considering (14) and setting , one easily concludes that the equations (14) and (15) are equivalent.
From (12), we have that is a unit normal field to . Therefore, if we choose an orthonormal frame in , we have
[TABLE]
Now, equality (16) follows from (17) if we set ∎
The identities in the above lemma suggest the consideration of horizontally homothetic functions, which we now introduce (cf. [16, 17]).
Definition 3**.**
We say that a smooth function on is horizontally homothetic if the identity holds on
Our next result establishes the uniqueness of vertical helicoids as minimal hypersurfaces which are local graphs of harmonic functions.
Theorem 2**.**
Let where is a smooth function defined on a domain whose gradient never vanishes. Then, if the angle function of is nonconstant, the following are equivalent:
- i)
* is a vertical helicoid in *
- ii)
* is harmonic and is minimal.*
- iii)
* is harmonic and horizontally homothetic.*
Proof.
Assume that is a vertical helicoid. Then, for any horizontal section of Also, by Theorem 1, is minimal. So, by Lemma 3, satisfies equation (15). Combining it with (16), we have
[TABLE]
which yields This, together with (15), implies that is a harmonic function, that is, (i) (ii).
Let us suppose now that (ii) holds. Then, satisfies (15). Since is harmonic, it follows that is also horizontally homothetic. Now, we have from (16) that the horizontal sections of are minimal. Hence, from Theorem 1, is a vertical helicoid, which shows that (i) and (ii) are equivalent.
The equivalence between (ii) and (iii) follows directly from Lemma 3-(i). ∎
We now make use of Theorem 2 to obtain vertical helicoids which contain spacelike pieces of zero mean isocurved hypersurfaces. Before that, let us remark that, by (32), the angle function of satisfies
[TABLE]
Therefore, is a spacelike hypersurface if and only if
Example 7**.**
Consider the set of points which satisfy and define on it the function
[TABLE]
From a direct computation, one concludes that is harmonic and horizontally homothetic. Thus, Theorem 2 gives that is a vertical helicoid. Moreover, the gradient of is
[TABLE]
which implies that
[TABLE]
Therefore, if we assume and consider the set of points for which the right hand side of (18) is we have that is spacelike and, in particular, zero mean isocurved in
Example 8** (Y-L Ou examples).**
The following functions , which were considered by Y-L Ou in [16, 17], are all harmonic and horizontally homothetic. Therefore, by Theorem 2, their graphs are complete embedded vertical helicoids in the corresponding product
- i)
- ii)
- iii)
We remark that, in contrast with (i), in (ii) and (iii) the horizontal sections of are non totally geodesic. Also, in all cases, for certain suitable values of the parameter has nonempty spacelike zero mean isocurved open sets.
4.2. Construction and Local Characterization of Vertical Helicoids
In this section, we generalize the method for constructing vertical helicoids in which we applied in Examples 2–6. We also give a local characterization of vertical helicoids whose horizontal sections are totally geodesic.
Let be an open interval in and let
[TABLE]
be a one-parameter group of isometries of such that is the identity map. Choose a hypersurface define by
[TABLE]
and let and be unit normal fields on and , respectively.
Definition 4**.**
Given a constant we call the hypersurface
[TABLE]
the -pitched twisting of determined by
Given , denote by the orbit of in under the action of , that is,
[TABLE]
Finally, define the -function of as
[TABLE]
Lemma 4**.**
Given let be the -pitched twisting of a hypersurface determined by a one-parameter group Then, never vanishes on Furthermore, defines an asymptotic direction on if and only if the gradient of the -function of is a horizontal field. If so, is a minimal vertical helicoid in , provided is minimal in and is nonconstant on Under these conditions, the open set
[TABLE]
if nonempty, is spacelike and, then, zero mean isocurved in
Proof.
Given a point we have that
[TABLE]
Hence, a unit normal field for in can be defined as
[TABLE]
In particular, the angle function of at is given by
[TABLE]
Hence, , which implies that never vanishes on Equality (22) also gives that is a multiple of So, is an asymptotic direction of if and only if for all . This proves the first part of the statement.
For the second part, we have just to consider Theorem 1 and observe that all the horizontal sections of are isometric to . Hence, they are minimal if is minimal in In addition, a direct computation yields which implies that , if nonempty, is spacelike. This finishes the proof. ∎
Let be as in the above lemma. Given considering (21), we will denote by the component of on So, on we have
[TABLE]
Lemma 5**.**
Let be as in Lemma 4. Assume that its -function is independent of i.e., on Then is a horizontal field on if and only if
[TABLE]
Proof.
Since we have
[TABLE]
Hence, if and only if ∎
Recall that the cone over a given hypersurface of is the hypersurface of which is defined as
[TABLE]
It is an elementary fact that a hypersurface is minimal in if and only if its associated cone is minimal in
Lemma 6**.**
Assume that is a hypersurface of and let be the cone of over . Assume further that is a one-parameter subgroup of the orthogonal group Given denote by (respect. ) the -pitched twisting of in (respect. ) determined by , that is,
- •
**
- •
**
Under these conditions, is a vertical helicoid in if and only if is a vertical helicoid in Moreover, open spacelike subsets occur in if and only if they occur in .
Proof.
Setting and , it is easily checked that the unit normals and coincide (as vectors in ). Thus, denoting by the angle function of we have that . Consequently, is horizontal on if and only if is horizontal on In addition, any horizontal section is clearly the cone of in In particular, is minimal in if and only if is minimal in Therefore, is a vertical helicoid in if and only if is a vertical helicoid in .
The last assertion in the statement follows from the equality ∎
Now, by means of Lemmas 4–6, we construct properly embedded vertical helicoids in whose horizontal sections project on totally geodesic hypersurfaces of First, we handle the Euclidean case For that, consider the matrices
[TABLE]
and, for define as the following block diagonal matrix:
- •
\Gamma_{s}=\left[\begin{array}[]{ccccc}e^{(ks)J}&&&&\\ &e^{(ks)J}&&&\\ &&\ddots&&\\ &&&e^{(ks)J}&\\ &&&&e^{(ks)J}\end{array}\right] ( even).
- •
\Gamma_{s}=\left[\begin{array}[]{ccccc}e^{(ks)J}&&&&\\ &e^{(ks)J}&&&\\ &&\ddots&&\\ &&&e^{(ks)J}&\\ &&&&\,1\end{array}\right] ( odd).
We have that is a one-parameter group of isometries of So, given we can choose a totally geodesic hyperplane through the origin and consider the -pitched twisting determined by . In this setting, since and commute, we have that
[TABLE]
Hence, for any
[TABLE]
where
- •
\boldsymbol{J}=\left[\begin{array}[]{ccccc}J&&&&\\ &J&&&\\ &&\ddots&&\\ &&&J&\\ &&&&J\end{array}\right] ( even).
- •
\boldsymbol{J}=\left[\begin{array}[]{ccccc}J&&&&\\ &J&&&\\ &&\ddots&&\\ &&&J&\\ &&&&0\end{array}\right] ( odd).
Thus,
[TABLE]
i.e., is nonconstant and independent of Also, the orbits , lie on geodesic spheres of centered at the origin Thus, since the hypersurfaces all intersect these spheres orthogonally, we have, in particular, that (23) holds. So, by Lemma 5, is horizontal on
Now, Lemma 4 applies and gives that is a properly embedded vertical helicoid in In addition, equality (24) and the second part of Lemma 4 imply that, for a sufficiently large contains open spacelike zero mean isocurved subsets.
The above method can be easily adapted for constructing properly embedded vertical helicoids in Indeed, one has just to consider the standard isometric immersion of into the Lorentz space and then define the isometries as
- •
\Gamma_{s}=\left[\begin{array}[]{cccccc}e^{(ks)J}&&&&&\\ &e^{(ks)J}&&&&\\ &&\ddots&&&\\ &&&e^{(ks)J}&\\ &&&&e^{(ks)J}&\\ &&&&&1\end{array}\right] ( even).
- •
\Gamma_{s}=\left[\begin{array}[]{cccccc}e^{(ks)J}&&&&&\\ &e^{(ks)J}&&&&\\ &&\ddots&&&\\ &&&e^{(ks)J}&&\\ &&&&1\phantom{12}&\\ &&&&&1\end{array}\right] ( odd).
The rest of the argument is the same as in the Euclidean case.
For the spherical case we consider the standard isometric immersion of into and then define as the totally geodesic sphere where is an arbitrary totally geodesic hyperplane of through the origin . For , the -twisting of determined by as described above, is a vertical helicoid in Since is the cone of over Lemma 6 gives that the corresponding -twisting of is a properly embedded minimal vertical helicoid in
We summarize these considerations in the following
Theorem 3**.**
There exists a two-parameter family of properly embedded vertical helicoids in whose horizontal sections are vertical translations of totally geodesic hypersurfaces of Such a is an -pitched twisting of a totally geodesic hypersurface determined by a suitable one-parameter subgroup of . Furthermore, for any fixed the parameter can be chosen in such a way that contains open spacelike zero mean isocurved subsets.
Our next result shows that any vertical helicoid in with nonvanishing angle function and totally geodesic horizontal sections is locally a twisting. In particular, Theorem 3 admits a local converse.
Theorem 4**.**
Let be a vertical helicoid with nonvanishing angle function. Assume that each horizontal section is totally geodesic in Then, given there exist a connected open set of , a hypersurface and a one-parameter group of isometries
[TABLE]
such that is the -pitched twisting of determined by that is,
[TABLE]
Proof.
Let be the flow of the field on i.e.,
[TABLE]
Considering that
[TABLE]
we have In particular, takes a horizontal section to .
Since we are assuming we have that is locally a vertical graph. So, there exists a connected open set of satisfying where is a differentiable function defined on the domain
After a vertical translation, we can assume nonempty and for some In this setting, define the field as
[TABLE]
and let be the its flow on , that is,
[TABLE]
Writing one has for (Here, we are identifying with ) Moreover, it follows from (12) that is parallel to which implies that is orthogonal to all level sets ,
Noticing that the family defines a totally geodesic foliation of we conclude from [21, Corollary 6.6] that, for the restriction of to is an isometry over its image . Also, since is a vertical helicoid, we have that , and so is constant along the curves (see Remark 2). In addition, , and Thus, for any we have
[TABLE]
It follows from the above considerations that, defining as the union of all level sets with any map is an isometry from to Therefore, if we set, by abuse of notation, and we have that
[TABLE]
as we wished to prove. ∎
Since -dimensional minimal submanifolds are totally geodesic, Theorem 4 has the following consequence.
Corollary 2**.**
Any two-dimensional vertical helicoid with nonvanishing angle function is given, locally, by a twisting of a geodesic of
As a further application of Lemma 4, we now generalize the construction made in Example 4. Namely, we will obtain a family of properly embedded vertical helicoids in the product by twisting -dimensional Clifford tori.
We will adopt the following notation. The identity matrix of order will be denoted by . We will write , now, for the block matrix
[TABLE]
Then, setting , and the following identity holds:
[TABLE]
In particular, the derivative of the map is
[TABLE]
Theorem 5**.**
Let be the minimal Clifford torus of the sphere . Then, for any the -pitched twisting
[TABLE]
is a properly embedded vertical helicoid in . Furthermore, for any fixed the parameter can be chosen in such a way that contains open spacelike zero mean isocurved subsets.
Proof.
Consider the standard immersion of into and define the following local parametrization of :
[TABLE]
where and are conformal parametrizations of
Setting and , we have that
[TABLE]
In particular, is a unit normal field on where
[TABLE]
Writing and , we have that the orbit of a point under the action of is
[TABLE]
From , one has
[TABLE]
Thus, with the notation of Lemma 4,
[TABLE]
so that is independent of Now, for define
[TABLE]
and notice that
[TABLE]
Hence, setting and , (recall that and are both conformal), we have that
[TABLE]
for
From (25), we have that So,
[TABLE]
from which we conclude that the matrix of with respect to is
[TABLE]
where the non dotted missing entries are all zero.
Computing the cofactors of the first entries of the last line of , we conclude that the first entries of the last line of are
[TABLE]
where Since the coordinates of with respect to the frame
[TABLE]
are the entries of the column matrix
[TABLE]
it follows from (26) and (27) that the last coordinate of with respect to is
[TABLE]
so that is a horizontal field on
Finally, we observe that
[TABLE]
Thus, given , for a sufficiently large the open set of points of on which is nonempty. The result, then, follows from Lemma 4. ∎
From the above theorem and Lemma 6, we have:
Corollary 3**.**
Let be the cone over the Clifford torus of . Then, for any the -pitched twisting
[TABLE]
is an embedded vertical helicoid of Furthermore, for any fixed the parameter can be chosen in such a way that contains open spacelike zero mean isocurved subsets.
It should be mentioned that, through a method different from ours, Choe and Hoppe [7] showed that the twisted cones in the above corollary are minimal hypersurfaces of . (We are grateful to Alma Albujer for let us know about this work.) A distinguished property of these -twisted cones is that, for sufficiently large they constitute nodal sets of the solutions of the Allen-Cahn differential equation (see [9]).
5. Hypersurfaces with a Canonical Direction
With the aim of introducing and studying vertical catenoids in we proceed now to the characterization of hypersurfaces of which have as a principal direction. Our approach will be based on the work of R. Tojeiro [20], who considered the case where is a constant sectional curvature space form
We start with an arbitrary isometric immersion
[TABLE]
assuming that there is a neighborhood of in without focal points of that is, the restriction of the normal exponential map to is a diffeomorphism onto its image. In this case, denoting by the unit normal field of there is an open interval such that, for all
[TABLE]
is a well defined geodesic of without conjugate points. In particular, for all
[TABLE]
is an immersion of into which is said to be parallel to Observe that, given , the tangent space of at is the parallel transport of along from [math] to Also, with the induced metric, the unit normal of at is
Now, define in the hypersurface
[TABLE]
where is an increasing diffeomorphism, i.e., We call an -graph of
For any point one has
[TABLE]
A unit normal to is
[TABLE]
In particular, its angle function is
[TABLE]
Theorem 6**.**
If is an -graph in the following hold:
- i)
* and never vanish on *
- ii)
* is a principal direction of *
- iii)
* and the principal curvature of in the direction are constant along the horizontal sections of *
Conversely, if is a hypersurface with nonvanishing angle function which has as a principal direction, then is locally an -graph.
Proof.
Assume that is an -graph of Then, by (30), and In particular, never vanishes on
Since, for any , is a geodesic of (and so of ), and we have Then, noticing that one has
[TABLE]
Hence, for all we have that which implies that is a principal direction of In addition, one has
[TABLE]
So, the corresponding eigenvalue of is
[TABLE]
(for ), which gives that is a function of alone, and so it is constant along the horizontal sections of By (30), the same is true for
Finally, observing that we conclude that is also a principal direction of with principal curvature i.e.,
[TABLE]
This proves the first part of the theorem.
Conversely, let us suppose that is a hypersurface which has as a principal direction and whose angle function never vanishes. Then, is (locally) a graph of a differentiable function defined on a domain (By abuse of notation, we keep denoting this local graph by .)
As we have seen in Section 4.1, in this setting,
[TABLE]
where, as before, we are writing instead of
Considering the flow of on and possibly restricting the domain we can assume that the horizontal sections are all connected and homeomorphic to a certain Riemannian manifold In other words, there exists an open interval such that the map given by
[TABLE]
is a well defined immersion satisfying .
Define the map by
[TABLE]
and observe that each is an immersion whose image is a level set of In particular, is orthogonal to with respect to the induced metric. Furthermore, since is a principal direction and we have that is constant along the horizontal sections (so, the same is true for since ). This, together with (32), gives that, for each is constant on the level set Consequently, the (normalized) trajectories of are geodesics of (see [20, Lemma 1]).
For a fixed let us denote by the velocity vector of the trajectory at that is,
[TABLE]
In particular, the curve is tangent to and, by the above considerations, is a geodesic of (when reparametrized by arclength). Also, from
[TABLE]
we have which yields
[TABLE]
Let be the arclength parameter of from an arbitrary point Since is a function of alone, it follows from (33) that the same is true for Hence, the function depends only on and satisfies Writing, by abuse of notation, , and , one has that each is an arclength geodesic of so that the immersions are parallel and is the corresponding -graph. This finishes the proof. ∎
We get from Theorem 6 the following result, which classifies the hypersurfaces of whose angle function is constant. For , this was done in [15, 20].
Corollary 4**.**
Let be a connected hypersurface of . Then, if the angle function of is constant, one of the following holds:
- i)
* is an open set of .*
- ii)
* is an open set of a vertical cylinder over a hypersurface of *
- iii)
* is locally an -graph with constant.*
Conversely, if one of these possibilities occur, then is constant.
Proof.
Suppose that is constant on Clearly, (i) occurs if , and (ii) occurs if Otherwise, and Since, it follows that is a principal direction of Hence, by Theorem 6, is locally an -graph and, by (30), is constant.
The converse is immediate in cases (i) and (ii). The case (iii) follows directly from equality (30). ∎
An important class of hypersurfaces of having as a principal direction are the rotation hypersurfaces, which are those obtained by the rotation of a plane curve about an axis Clearly, any horizontal section of a rotational hypersurface is contained in a geodesic sphere with center at Considering this property, we introduce the following notion of rotational hypersurface in .
Definition 5**.**
A hypersurface is called rotational, if there exists a fixed point such that any horizontal section is contained in a geodesic sphere with center at If so, we call the axis of
Remark 3**.**
Let be a rotational hypersurface with no horizontal points and nonvanishing Since concentric geodesic spheres constitute a parallel family of hypersurfaces of under these hypotheses, is locally an -graph. Hence, by Theorem 6, is a principal direction of any such rotational
We introduce now a special type of family of parallel hypersurfaces which will play a fundamental role in the sequel.
Definition 6**.**
We call a family of parallel hypersurfaces isoparametric if has constant mean curvature (depending on ) for all If so, each hypersurface is also called isoparametric.
Example 9**.**
It is well known that any totally umbilical hypersurface of is isoparametric (see, e.g., [10]).
Example 10**.**
There are certain Hadamard-Einstein manifolds, known as Damek-Ricci spaces, which have many families of isoparametric hypersurfaces, including its geodesic spheres. More specifically, geodesic spheres (of any radius) in symmetric Damek–Ricci spaces are isoparametric with constant principal curvatures, whereas geodesic spheres (of small radius) in non-symmetric Damek–Ricci spaces are isoparametric with nonconstant principal curvatures. The symmetric Damek-Ricci spaces are completely classified. They are the hyperbolic space the complex hyperbolic space the quaternionic hyperbolic space, and the octonionic hyperbolic plane (see [10, Section 6] and the references therein for an account of Damek-Ricci spaces).
Example 11**.**
Let , be one of the simply connected 3-homogeneous manifolds with isometry group of dimension 4: The products and (), the Heisenberg space (), the Berger spheres (), or the universal cover of the special linear group (). In [11], the authors classified all isoparametric hypersurfaces of these spaces, showing, in particular, that none of them is spherical.
In our next result, we show that there exist minimal or constant mean curvature -graphs in if and only if has isoparametric hypersurfaces.
Theorem 7**.**
Let be an -graph, such that is isoparametric with constant mean curvature . Assume that, for a given constant the diffeomorphism is defined by the equality
[TABLE]
where is a solution of the linear differential equation of first order
[TABLE]
satisfying Under these conditions, has constant mean curvature Conversely, if has constant mean curvature then is isoparametric and the function is necessarily given by (34) with
Proof.
Let us denote the mean curvature of by . By equalities (3) and (31), we get where
[TABLE]
So, we have However, by (30), one has Therefore, if we set we get
[TABLE]
A direct computation gives that and also that
[TABLE]
Thus, if is isoparametric and the function is defined by (34) (with satisfying (35)), it follows by (37) that Then, comparing (35) and (36), we conclude that has constant mean curvature
Conversely, if has constant mean curvature it follows from (36) that is isoparametric and, by (37), that is given by equality (34) with ∎
6. Vertical Catenoids in
In this section, we introduce the minimal hypersurfaces of which resemble the standard catenoids of with respect to some of its fundamental properties. The definition is as follows.
Definition 7**.**
We say that a hypersurface of with no horizontal points and nonconstant angle function is a vertical catenoid if the following conditions are satisfied:
- i)
is a principal direction of with principal curvature
- ii)
Any horizontal section has nonzero constant mean curvature (i.e., depending only on ) given by
[TABLE]
Regarding condition (ii) in the above definition, notice that, from Theorem 6, for any satisfying condition (i), the function is constant along the horizontal sections It should also be noticed that a vertical catenoid, as defined, is not necessarily rotational (see Definition 5). At the end of this section we construct non rotational properly embedded vertical catenoids in , where is a Hadamard manifold (see Theorems 10 and 11).
The result below follows directly from Lemma 1 and Remark 3. It establishes the minimality of catenoids as hypersurfaces of , and also the uniqueness of rotational vertical catenoids as minimal rotational hypersurfaces of . The latter is a well known property of the standard catenoids of Euclidean space
Proposition 1**.**
The following assertions on a hypersurface with no horizontal points and nonconstant angle function hold:
- •
If is a vertical catenoid, then is minimal.
- •
If is rotational and minimal, then is a vertical catenoid.
It follows from Theorems 6 and 7 that, as long as contains isoparametric hypersurfaces, there exist vertical catenoids in which are -graphs. This applies, for instance, to all manifolds described in Examples 9–11. In what follows, we use this fact to construct properly embedded vertical catenoids by “gluing” pieces of such graphs.
First, recall that is said to be a Hadamard manifold if it is complete, simply connected, and has non positive sectional curvature. Any Hadamard manifold is diffeomorphic to through the exponential map, so that, for a given point , and the geodesic sphere with center at and radius is well defined. We will write for the geodesic ball of with center at and radius , and for its closure in
Theorem 8**.**
Let be a Hadamard manifold whose geodesic spheres are all isoparametric. Then, there exists a one-parameter family of properly embedded rotational catenoids in the product which are all homeomorphic to and symmetric with respect to the horizontal section
Proof.
Fix and choose For each let
[TABLE]
be the geodesic sphere of with center at and radius Since is a Hadamard manifold, each immersion is convex and non totally geodesic. Hence, taking the “outward” unit normal of , we have that the (constant) mean curvature of is negative. In particular, setting
[TABLE]
we have that is a solution of which satisfies for all
Now, with the purpose of applying Theorem 7, we define the function
[TABLE]
The integral on the right is improper, for as So, we have to prove that is well defined, i.e., that this integral is convergent. For that, notice that as In particular, there exist such that
[TABLE]
This, and the fact that is decreasing and satisfies for gives
[TABLE]
which implies that the function is well defined, and that as From this and Theorems 6 and 7, we conclude that the -graph, which we denote by , is a rotational vertical catenoid.
Furthermore, is clearly a graph over contained in and with boundary In addition,
[TABLE]
which, together with (30), gives that as Hence, the tangent spaces of along any trajectory of on converge to a vertical space (i.e., parallel to ) at a point on (see Fig. 1).
Now, let be the reflection of with respect to Then, is also a rotational catenoid in with boundary which implies that it can be “glued” together with along that is, we can define
[TABLE]
Since the tangent spaces of and are vertical along we have that is smooth. Moreover, being a geodesic sphere, is a manifold. Also, the trajectories of on are geodesics (see [20, Lemma 1]) — so, they are as well — and any of them intersects transversally. Therefore, is a properly embedded rotational catenoid in which is clearly homeomorphic to and symmetric with respect to ∎
The above theorem and the considerations of Example 10 give the following result.
Corollary 5**.**
Let be a symmetric Damek-Ricci space. Then, there exists a one-parameter family of properly embedded rotational catenoids in which are all homeomorphic to and symmetric with respect to
Assume and let be a rotational catenoid as in Theorem 8. When , is a standard catenoid of obtained by rotating a catenary about a fixed axis. For the half catenoid in one has
[TABLE]
It is easily checked that this function is bounded for So, in this case, for any , the rotational catenoid is contained in a “slab” determined by two horizontal sections. For we have
[TABLE]
which is clearly an unbounded function.
In the height function of any is uniformly bounded. More precisely, given for any is contained in a slab of width Indeed, in this setting, the mean curvature of is which gives, for
[TABLE]
Thus, the function which defines is
[TABLE]
Applying, in the last integral, the change of variables we get
[TABLE]
However, which implies that
[TABLE]
Remark 4**.**
In [5], the authors constructed the rotational catenoids in by rotating suitable curves about an axis. They also obtained the bound for the height of the half catenoids
Next, we show that admits a one-parameter family of rotational catenoids as well.
Theorem 9**.**
There exists a one-parameter family of properly embedded Delaunay-type rotational catenoids in , that is, each is periodic, homeomorphic to , and has unduloids as the trajectories of the gradient of its height function.
Proof.
Let , be a family of concentric geodesic spheres of with center at and outward normal orientation, that is, the mean curvature of is Given consider the function
[TABLE]
which can be verified to be a solution of satisfying
Now, let us define the function
[TABLE]
Since and we can proceed as in the proof of Theorem 8 to conclude that is well defined and bounded. In particular, and are well defined.
It follows from the above that is homeomorphic to and has boundary (Fig. 2). Also, the tangent spaces of are vertical along its boundary for Therefore, from successive reflections of with respect to suitable horizontal sections of , we obtain a periodic properly embedded rotational catenoid homeomorphic to ∎
Remark 5**.**
The above Delaunay-type catenoids were also obtained in [18].
Given a Hadamard manifold recall that the Busemann function of corresponding to an arclength geodesic is defined as
[TABLE]
The level sets of a Busemann function are called horospheres of In this setting, as is well known, is a parallel family which foliates Furthermore, any geodesic of which is asymptotic to (i.e., with the same point on the asymptotic boundary of ) is orthogonal to each horosphere . We also remark that horospheres are submanifolds of class (at least) (see, e.g., [12, Proposition 3.1]).
In hyperbolic space any horosphere is totally umbilical with constant principal curvatures equal to Also, as shown in [6, Proposition-(vi), pg. 88], except for hyperbolic space(i)(i)(i)In [6], hyperbolic space is not considered a Damek-Ricci space., any Damek-Ricci space contains a family of parallel horospheres such that the principal curvatures of each are and , both with constant multiplicities.
Let us see now that, when is a Hadamard manifold whose horospheres are properly embedded and isoparametric with the same mean curvature, as in the above examples, one can construct properly embedded vertical catenoids in with special properties.
Theorem 10**.**
Let be a parallel family of properly embedded horospheres of constant mean curvature in a Hadamard manifold Then, there exists a properly embedded vertical catenoid in of class at least which is homeomorphic to . Furthermore, is foliated by horospheres, is symmetric with respect to and is asymptotic to both and
Proof.
For each , consider the isometric immersion such that . Define the function
[TABLE]
and notice that is a solution of satisfying
[TABLE]
Thus, by Theorem 7, defining
[TABLE]
one has that the -graph is a minimal hypersurface of In addition,
[TABLE]
Hence, denoting by the mean convex side of , and identifying with it follows that is a minimal graph over which has boundary and is asymptotic to (see Fig. 3). In particular, is homeomorphic to .
We also have that So, as in the previous theorems, any trajectory of on meets orthogonally. Therefore, setting for the reflection of with respect to , and defining we can argue just as before and conclude that is a properly embedded -differentiable (for horospheres are, at least, differentiable) vertical catenoid of which has all the stated properties. ∎
In our next result, we consider more general isoparametric foliations of Hadamard manifolds.
Theorem 11**.**
Let be an isoparametric family of hypersurfaces in a Hadamard manifold Assume that:
- i)
For all is a proper embedding with positive mean curvature
- ii)
* foliates i.e., *
Then, there exists a properly embedded catenoid in which is homeomorphic to Furthermore, is foliated by (vertical translations of) the leaves of and is symmetric with respect to
Proof.
Since for all we have that the function
[TABLE]
which is a solution of satisfies:
[TABLE]
In addition, From this, as in the preceding proofs, we get that
[TABLE]
is a well defined function, i.e., this improper integral is convergent. So, the -graph is a minimal graph over whose -trajectories meet orthogonally. Here, is the mean convex side of . In particular, is homeomorphic to . Now, by reflecting with respect to as we did before, we obtain the desired vertical catenoid of ∎
In hyperbolic space the well known families of equidistant hypersurfaces satisfy the conditions of Theorem 11, since they foliate and have constant mean curvature between [math] and Also, each leaf of such a family is and homeomorphic to So, we have the following final result, which was obtained in [8] for the particular case
Corollary 6**.**
Let be a family of parallel equidistant hypersurfaces in Then, there exists a properly embedded vertical catenoid in which is homeomorphic to . Moreover, is symmetric with respect to and is foliated by (vertical translations of) the leaves of
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] E. M. Alarcón, A. L. Albujer, M. Caballero: Spacelike hypersurfaces in the Lorentz-Minkowski space with the same Riemannian and Lorentzian mean curvature. Proceedings of the Lorentzian Geometry and Related Topics - Geloma - 2016. (2017) 1–12.
- 2[2] E. M. Alarcón, L. J. Alias, F. R. dos Santos: A new approach to minimal and maximal hypersurfaces in product spaces. Results in Mathematics, 74(3) (2019) 116.
- 3[3] A. L. Albujer, M. Caballero: A note on mean isocurved hypersurfaces in a Lorentzian product space, preprint (2019).
- 4[4] A. L. Albujer, M. Caballero: Geometric properties of surfaces with the same mean curvature in R 3 superscript 𝑅 3 R^{3} and L 3 superscript 𝐿 3 L^{3} . J. Math. Anal. Appl. 445 (2017), 1013–1024.
- 5[5] P. Bérard, R. Sa Earp. Minimal hypersurfaces in ℍ n × ℝ superscript ℍ 𝑛 ℝ \mathbb{H}^{n}\times\mathbb{R} , total curvature and index. Boll. Unione Mat. Ital., 9 (3) (2016), 341–468.
- 6[6] J. Berndt, F. Tricerri, L. Vanhecke: Generalized Heisenberg groups and Damek-Ricci harmonic spaces. Lecture Notes in Mathematics 1598. Springer Verlag (1995).
- 7[7] J. Choe, J. Hoppe: Higher dimensional minimal submanifolds generalizing the catenoid and helicoid. Tohoku Math. J., 65 (2013), 43–55.
- 8[8] B. Daniel: Isometric immersions into 𝕊 n × ℝ superscript 𝕊 𝑛 ℝ \mathbb{S}^{n}\times\mathbb{R} and ℍ n × ℝ superscript ℍ 𝑛 ℝ \mathbb{H}^{n}\times\mathbb{R} and applications to minimal surfaces. Trans. Amer. Math. Soc. 361 (2009), 6255–6282.