Minkowski products of unit quaternion sets
Rida T. Farouki, Graziano Gentili, Hwan Pyo Moon, Caterina Stoppato

TL;DR
This paper introduces and analyzes the Minkowski product of unit quaternion sets to characterize combined spatial rotations with uncertainties, providing new mathematical insights and visualization methods.
Contribution
It presents the first analysis of Minkowski products of unit quaternion sets, including closure conditions, specific set products, and visualization techniques.
Findings
Closure under Minkowski product for spherical caps on $S^3$
Methods for visualizing quaternion sets in $ r^3$
Principles for identifying boundary points in Minkowski products
Abstract
The Minkowski product of unit quaternion sets is introduced and analyzed, motivated by the desire to characterize the overall variation of compounded spatial rotations that result from individual rotations subject to known uncertainties in their rotation axes and angles. For a special type of unit quaternion set, the spherical caps of the 3-sphere in , closure under the Minkowski product is achieved. Products of sets characterized by fixing either the rotation axis or rotation angle, and allowing the other to vary over a given domain, are also analyzed. Two methods for visualizing unit quaternion sets and their Minkowski products in are also discussed, based on stereographic projection and the Lie algebra formulation. Finally, some general principles for identifying Minkowski product boundary points are discussed in the case of full-dimension set…
Click any figure to enlarge with its caption.
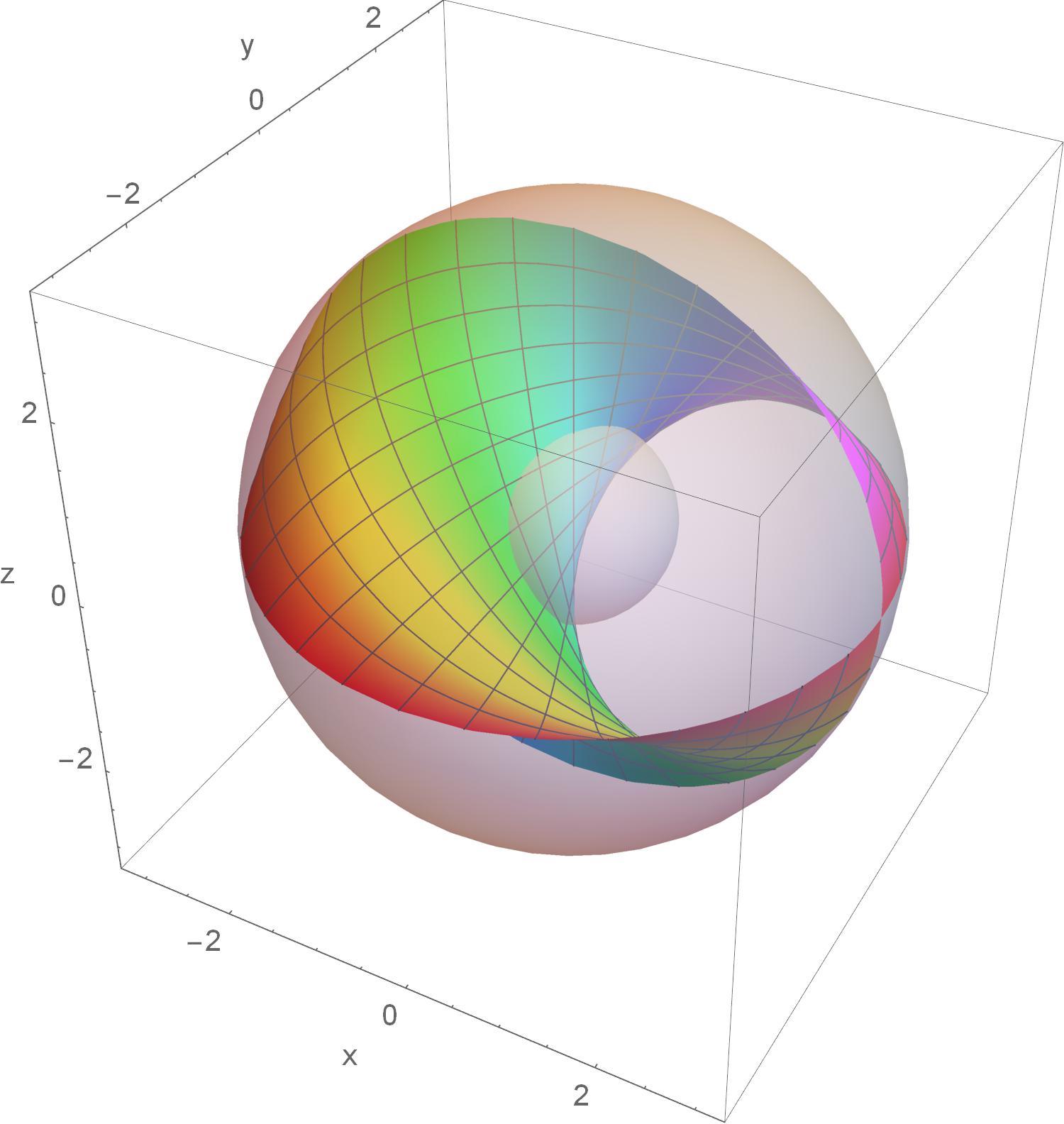 Figure 1
Figure 1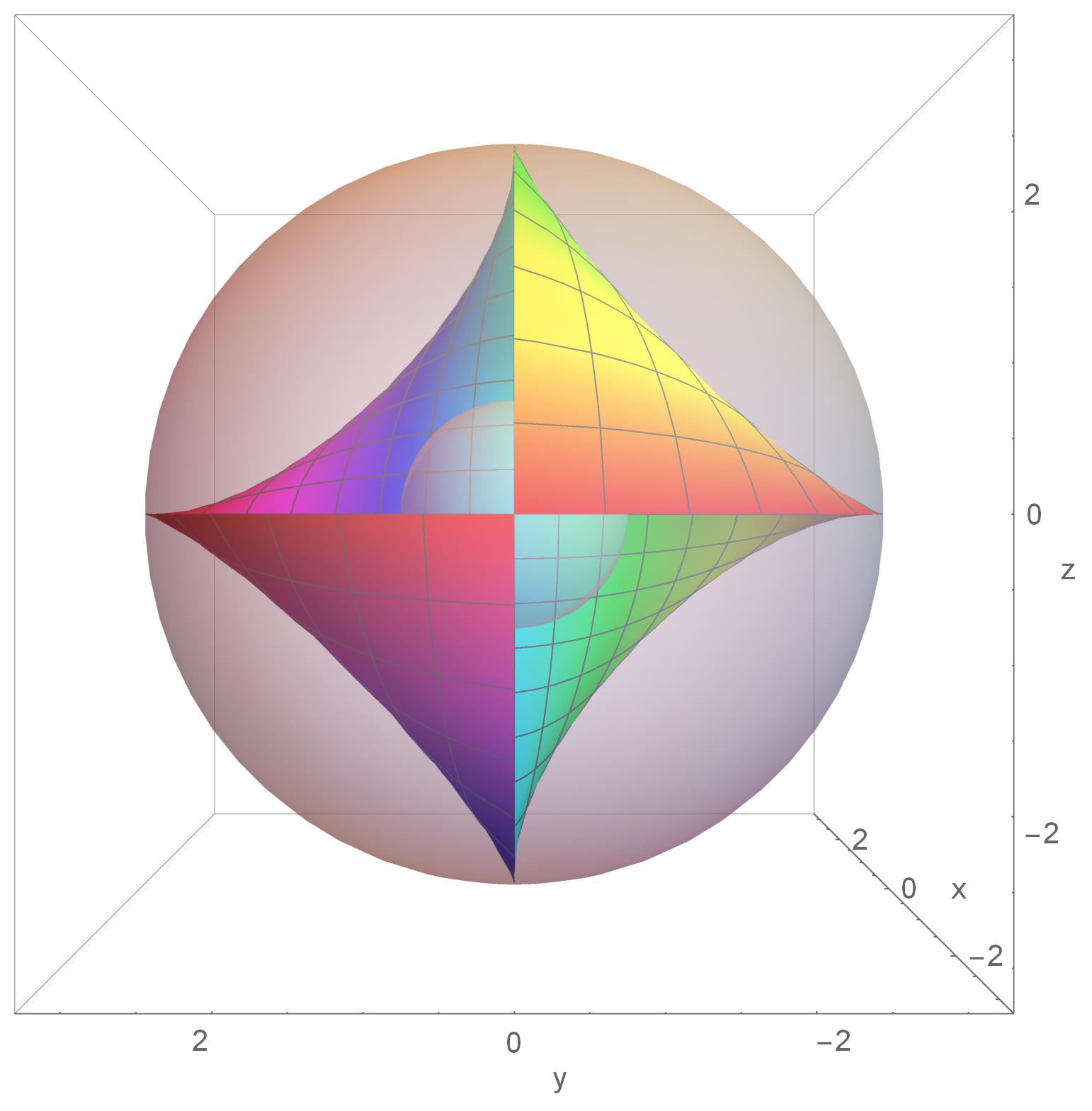 Figure 1
Figure 1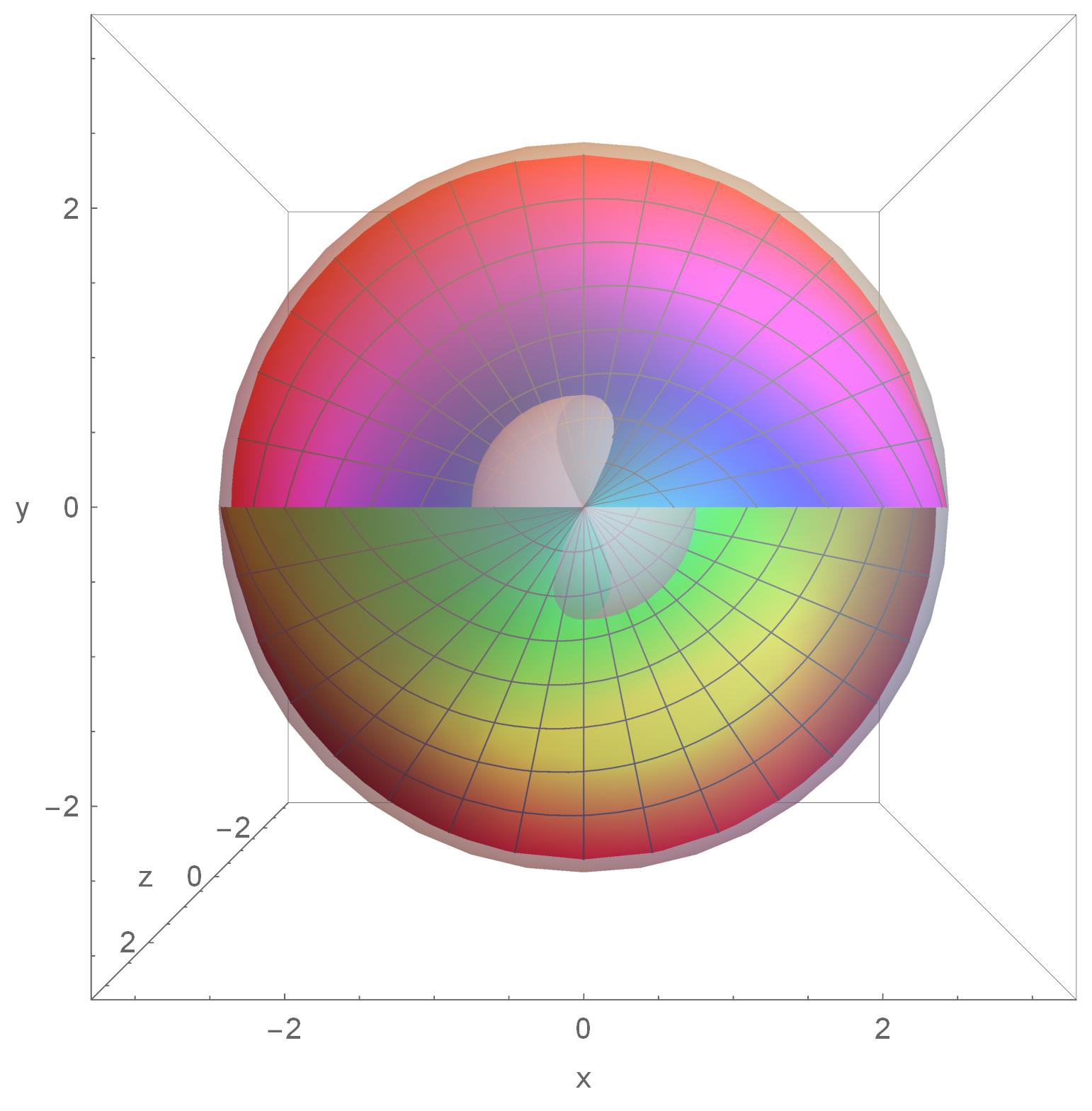 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Minkowski products of unit quaternion sets
Rida T. Farouki
Department of Mechanical and Aerospace Engineering,
University of California, Davis, CA 95616, USA
Graziano Gentili
Dipartimento di Matematica e Informatica “U. Dini,”
Università di Firenze, Viale Morgagni 67/A, I–50134 Firenze, Italy
Hwan Pyo Moon
Department of Mathematics,
Dongguk University–Seoul, Seoul 04620, Republic of Korea
Caterina Stoppato
Dipartimento di Matematica e Informatica “U. Dini,”
Università di Firenze, Viale Morgagni 67/A, I–50134 Firenze, Italy
Abstract
The Minkowski product of unit quaternion sets is introduced and analyzed, motivated by the desire to characterize the overall variation of compounded spatial rotations that result from individual rotations subject to known uncertainties in their rotation axes and angles. For a special type of unit quaternion set, the spherical caps of the 3–sphere in , closure under the Minkowski product is achieved. Products of sets characterized by fixing either the rotation axis or rotation angle, and allowing the other to vary over a given domain, are also analyzed. Two methods for visualizing unit quaternion sets and their Minkowski products in are also discussed, based on stereographic projection and the Lie algebra formulation. Finally, some general principles for identifying Minkowski product boundary points are discussed in the case of full–dimension set operands.
Keywords: Minkowski products, unit quaternions, spatial rotations
3–sphere, stereographic projection, Lie algebra, boundary evaluation.
e–mail addresses: [email protected], [email protected],
[email protected], [email protected].
1 Introduction
The Minkowski sum of two point sets is the set of all points generated [16] by the vector sums of points chosen independently from those sets, i.e.,
[TABLE]
The Minkowski sum has applications in computer graphics, geometric design, image processing, and related fields [9, 11, 12, 13, 14, 15, 20]. The validity of the definition (1) in for all stems from the straightforward extension of the vector sum to higher–dimensional Euclidean spaces. However, to define a Minkowski product set
[TABLE]
it is necessary to specify products of points in . In the case , this is simply the real–number product — the resulting algebra of point sets in is called interval arithmetic [17, 18] and is used to monitor the propagation of uncertainty through computations in which the initial operands (and possibly also the arithmetic operations) are not precisely determined.
A natural realization of the Minkowski product (2) in may be achieved [7] by interpreting the points and as complex numbers, with being the usual complex–number product. Algorithms to compute Minkowski products of complex–number sets have been formulated [6], and extended to determine Minkowski roots and powers [3, 8] of complex sets; to evaluate polynomials specified by complex–set coefficients and arguments [4]; and to solve simple equations expressed in terms of complex–set coefficients and unknowns [5]. The Minkowski algebra of complex sets introduces rich geometrical structures and has useful applications to mathematical morphology, geometrical optics, and the stability analysis of linear dynamic systems.
In proceeding to higher dimensions, it is natural to consider next the case of , in which a (non–commutative) “product of points” may be specified by invoking the quaternion algebra. In this context, the study of the Minkowski sum has no obvious and intuitive motivation, but the use of unit quaternions to describe spatial rotations provides a compelling case for the investigation of Minkowski products in . Applications in computer animation, robot path planning, 5–axis CNC machining, and related fields frequently involve compounded sequences of spatial rotations, that are individually subject to certain indeterminacies. The set of all possible outcomes of such compounded sequences of indeterminate spatial rotations possesses a natural description as the (ordered) Minkowski product of unit quaternion sets.
The remainder of this paper is organized as follows. Section 2 provides a brief review of the key properties of unit quaternions and their interpretation as rotation operators, while Section 3 discusses the visualization of the set of all unit quaternions (namely, the 3–sphere in ) through its stereographic projection to . The concept of a Minkowski product of two unit quaternion sets is then introduced in Section 4. In Sections 5 and Section 6, we focus on a specific type of unit quaternion set, the spherical caps on , and show that they exhibit closure under the Minkowski product. Section 7 then considers products of sets more closely related to applications, specified by fixing either the rotation axis or the angle, and varying the other over a given domain. As an alternative to stereographic projection, Section 8 describes a Lie algebra approach to visualizing unit quaternion sets and their Minkowski products, which has the virtue of generating bounded images in . Finally, Section 9 discusses general principles for identifying boundary points of Minkowski products, giving some necessary conditions and a sufficient condition for a product of two points to lie on the boundary. Section 10 summarizes the key results of this study and suggests further lines of investigation.
2 Quaternions and spatial rotations
Quaternions are “four–dimensional numbers” of the form
[TABLE]
where the elements , , of the quaternion algebra obey the multiplication rules and , , . A quaternion may be regarded as comprising scalar (real) and vector (imaginary) parts and , and we write . Real numbers and –vectors are subsumed as “pure scalar” and “pure vector” quaternions. The sum and (non–commutative) product of and can be expressed using scalar and cross products of vectors as
[TABLE]
Every quaternion has a conjugate , and a non–negative magnitude defined by , and one can verify that and . If , the quaternion has an inverse satisfying , and and specify the left and right division of by . We also define an inner product of and (regarded as vectors in ) by
[TABLE]
A unit quaternion satisfies , and it may be identified with a point on the unit 3–sphere in defined by the equation . Since a product of two unit quaternions is also a unit quaternion, the points of have the structure of a (non–commutative) group with respect to the quaternion product. Note that the inner product (3) is invariant under multiplication of the operands by a unit quaternion,
[TABLE]
since such multiplications correspond [2] to rotations in .
Any unit quaternion may be expressed in the form
[TABLE]
for some angle and unit vector . This defines a rotation operator in — for any pure vector , the product also defines a pure vector, corresponding to a rotation of through angle about an axis defined by . Note that and define equivalent rotations.
Successive spatial rotations can be replaced by a “compounded” rotation — the result of consecutively applying rotations and to is , which can be expressed as with . The non–commutative product captures the fact that the result of a sequence of rotations depends upon the order of their application. The rotation angle and axis of are given by
[TABLE]
[TABLE]
3 Stereographic projection to
The set of all unit quaternions occupies the 3–sphere in . To visualize a stereographic projection can be used to map it into , just as points on the 2–sphere can be imaged onto to generate a map of the earth’s surface. We recall the following definition.
Definition 1
Consider the conformal map defined by
[TABLE]
and its inverse
[TABLE]
The maps and , or rather their continuous extensions to the Alexandroff compactification , are called quaternionic Cayley transformations.
As conformal maps, and map –spheres and –spaces to –spheres and –spaces for . In particular, the next result concerns the unit -sphere in , denoted , and the –space of purely imaginary quaternions, denoted .
Proposition 1
The stereographic projection from the point of to , defined by
[TABLE]
is the restriction of to .
Proof : By direct computation, for all we have
[TABLE]
Hence, writing when , we obtain
[TABLE]
The set of unit quaternions can be parameterized in terms of hyperspherical coordinates through the expression
[TABLE]
where and . In terms of the scalar–vector form (5) with we have
[TABLE]
and conversely
[TABLE]
where is the angle with cosine and sine .
For each unit quaternion , the point defined by the stereographic projection (8) may be identified as the intersection with of the line in that passes through and . In terms of the hyperspherical coordinates (10) on , we have
[TABLE]
Thus may be interpreted as the point with “ordinary” spherical coordinates on the 2–sphere in with radius . The points and , corresponding to and , are mapped to the origin of and to infinity, respectively. In terms of the scalar–vector form (5) of , the stereographic projection to becomes
[TABLE]
i.e., is mapped to the point identified by the unit vector on the 2–sphere of radius in . Note that, although the unit quaternion specifies a rotation by angle about , equivalent to that specified by , it is mapped to the distinct point
[TABLE]
4 Quaternionic Minkowski product
Definition 2
The Minkowski product of two subsets of is defined by
[TABLE]
If , then the elements of describe all possible compounded rotations generated by a rotation followed by a rotation .
Remark 1
As a consequence of the properties of quaternionic multiplication, is an associative but noncommutative operation on the power set of .
The following Lemma can be verified by direct computation.
Lemma 1
Let
[TABLE]
Then for all the directional derivatives of in the directions and are
[TABLE]
Remark 2
Consider two unit quaternions
[TABLE]
and the unit quaternions that result from perturbations to the rotation angles and axes of . By Lemma 1, the following equality holds to first order:
[TABLE]
Thus, to first order in and the product is always distinct from — i.e., the unit quaternion product map has no stationary points.
We address the problem of determining Minkowski products of different types of subsets of . For subsets of of full dimension, we would ideally like to determine either (i) a “faithful” (one–to-one) parameterization, over a suitable domain in three parameters, of the product set ; or (ii) a characterization of its boundary in . Problem (ii) is, in general, more tractable. We show in Section 9 that , so (ii) amounts to identifying corresponding points and that generate (potential) points on the Minkowski product boundary .
5 Unit quaternion spherical caps
In the Minkowski algebra of complex sets [7], emphasis was placed on circular disks as set operands, and it seems natural to extend this to the context of unit quaternion sets. For this reason, the first class of subsets of that we will study is that of spherical caps, namely the subsets
[TABLE]
defined by the intersection of with a –ball that has a prescribed radius and unit quaternion as center. The set (13) includes all unit quaternions whose distance (measured on ) from does not exceed . In the case of deviations resulting from small perturbations and to the rotation angle and axis of , it includes all unit quaternions satisfying
[TABLE]
Remark 3
For the intersection of with the ball of radius and center in is identical to its intersection with a half–space orthogonal to , namely
[TABLE]
since . We distinguish three cases:
- •
for , this set coincides with ;
- •
for it is a proper subset of — a spherical cap — and its boundary in the topology of induced by is a –sphere;
- •
for , it is the singleton set .
Based on the preceding remark, we set with so that , and formulate unit quaternion spherical caps as follows.
Definition 3
For and , we define
[TABLE]
and denote its boundary in the topology of as .
Regarding quaternions as unit vectors in , we can also interpret as the intersection of with the cone of vectors whose inclinations with do not exceed . We note that, if , then is just the scalar part of . For the unit quaternion corresponding to a rotation through angle about the axis , the condition reduces to
[TABLE]
i.e., . The boundary corresponds to satisfaction of (14) with equality, i.e., . As observed in Remark 3, if (), and if (. In the case (), it is the set of all unit quaternions with any rotation axis and rotation angles .
Remark 4
Setting , we have
[TABLE]
5.1 Visualization by stereographic projection
We now consider the stereographic projection of the set onto .
Proposition 2
Let and .
If then is a closed –ball in . 2. 2.
If then is a closed half–space in . 3. 3.
If then is minus an open 3–ball.
Finally, for the image of through is , and for it is .
Proof : Since the statements for the cases and are trivial, we focus on the case . The set is the intersection of with a –ball centered at in . Thus,
[TABLE]
where is a closed subset of that includes as an interior point. The proposition then follows from the following observations:
If then and is a closed –ball in . 2. 2.
If then and is a closed half–space in . 3. 3.
If then is an interior point of and is minus an open –ball.
6 Products of unit quaternion spherical caps
We now compute the product . To this end, the following remark will be useful.
Remark 5
For all and for all , we have
[TABLE]
since from (4) we note that .
As a first consequence, it is possible to visualize and its boundary as copies of and , rotated within so as to have center instead of . We recall that and have been described in detail in the first part of Section 5.
Before considering the general product , it is instructive to examine a special case.
Lemma 2
Let . Then
[TABLE]
Proof : By Remark 4, is the set of all products of the form with , , . Now, the scalar part of is equal to
[TABLE]
which is greater than or equal to . If this bound implies that . If , the bound only implies the trivial inclusion .
On the other hand, let . If we can identify real numbers , with and such that , then for a suitably chosen with , and we conclude that . If , then such and exist when . If , then they exist for all . This proves that in the former case, and that in the latter case.
We are now ready to present the general result for the Minkowski products of unit quaternion spherical caps.
Theorem 1
Let and . Then
[TABLE]
Proof : From Remark 5, we have and . Taking into account Remark 1, we write
[TABLE]
We now apply Lemma 2. If then
[TABLE]
whence
[TABLE]
by two further applications of Remark 5. However, if , then
[TABLE]
7 Bounded rotation angles and axes
Although unit quaternion spherical caps admit a simple and elegant theory for their Minkowski products, they correspond to somewhat complicated and non–intuitive relations among the feasible rotation axes and angles. We now consider different types of sets, of greater relevance to the physical actuators used in robot manipulators, 5–axis milling machines, and related contexts.
Specifically, we analyze below the Minkowski products of sets defined by (1) fixed rotation axes, and rotation angles that vary over prescribed subsets of ; and (2) fixed rotation angles, and rotation axes that deviate from prescribed directions by no more than a given angle. In case (1) the operand sets are curves and their product is a 2–surface in , while in case (2) the operand sets are 2–surfaces and their product is of full dimension in .
7.1 Fixed rotation axis, bounded angle
Let us consider the following sets.
Definition 4
For each quaternionic imaginary unit , and for all and all ,
[TABLE]
is the great circle in that passes through and . For all the set is an arc of this great circle. Finally, is the singleton .
Proposition 3
For a fixed quaternionic imaginary unit , angles , and ranges , the product is a circle, a circular arc, or a singleton:
[TABLE]
Proof : The statement is an immediate consequence of the fact that
[TABLE]
for all .
We now study the nature of the product in greater detail. To this end, the following remark will prove useful.
Remark 6
For each quaternionic imaginary unit , and for all and all ,
[TABLE]
Theorem 2
For fixed quaternionic imaginary units with , the product
[TABLE]
is an immersed –surface in , possibly with boundary. The smallest unit quaternion spherical cap that includes this product has , where
[TABLE]
Moreover, if neither nor is equal to , and at least one of them is less than , then is an embedded –surface in , with boundary. Its boundary consists of four circular arcs which have pairwise intersections at the four points
[TABLE]
Proof : By Remarks 5 and 6, it suffices to consider the case . Consider the surjective map
[TABLE]
Note that is non–singular, since the –derivative and –derivative cannot be linearly dependent over : if they were, then would also be linearly dependent, contradicting the hypothesis .
Now let us determine for which the inclusion
[TABLE]
holds. The scalar part of the product is
[TABLE]
This quantity spans the whole interval with
[TABLE]
Moreover, is an embedding if and only if is injective. The equality holds if, and only if, , i.e., or . Thus, is injective if and only if neither nor equals and at least one of them is less than . When is an embedding, the boundary of consists of the four circular arcs
[TABLE]
[TABLE]
as desired.
Proposition 4
If then the smallest unit quaternion spherical cap that includes has
[TABLE]
Furthermore, the boundary of the embedded surface intersects the boundary of either at the two corners or at .
Proof : Let . By direct computation, the only critical point of in the interior of is its maximum point . Moreover, the restrictions to are concave. Hence, the minimum of in is attained at one of the four corner points . Now
[TABLE]
[TABLE]
and consequently
[TABLE]
since .
7.2 Bounded rotation axis, fixed angle
We now consider the following sets.
Definition 5
For each quaternionic imaginary unit and for all and all , we define
[TABLE]
is the –sphere obtained by intersecting with the –space of quaternions whose scalar part is equal to . For all , the set is a spherical cap of that –sphere, whose boundary in the topology of the –sphere is a circle:
[TABLE]
Here we introduce the symbol to distinguish this type of boundary from the boundary of the same set in the topology of . Finally, we note that .
Proposition 5
Choose quaternionic imaginary units and let and . Then the rank of the real differential of the map
[TABLE]
at a point is less than if and only if .
Proof : We denote the map by and fix a point . By Lemma 1, we have
[TABLE]
[TABLE]
for all and in the tangent space to at the point , i.e., for all
[TABLE]
The image of the differential of is the sum of the –plane through the origin and the –plane through the origin. Now, has dimension less than if and only if , which is equivalent to
[TABLE]
and this in turn is equivalent to , i.e., .
The previous result immediately implies the following description of the product for small .
Corollary 1
Choose quaternionic imaginary units with and let . Then if are sufficiently small, we have:
the map
[TABLE]
is a submersion; 2. 2.
its image is (the closure in of) an open subset of ; 3. 3.
the boundary is included in
[TABLE]
where the two members of the union intersect in the set .
The next result determines which spherical caps contain and it provides a rough estimate of which contain .
Proposition 6
For each quaternionic imaginary unit and for all and all , the smallest unit quaternion spherical cap that includes has equal to
[TABLE]
As a consequence, for all , all , and all , if then the unit quaternion spherical cap
[TABLE]
includes .
Proof : The first statement is a consequence of the fact that, for , the expression
[TABLE]
attains its minimum when . The second statement follows from the inclusions
[TABLE]
and from Theorem 1.
Remark 7
The inequality is strict if and only if and .
In some instances, the estimate for the product presented in Proposition 6 is sharp.
Example 1
For all quaternionic imaginary units and all ,
[TABLE]
by Proposition 6 and Remark 7. For a fixed unitary orthogonal to , the product of the two elements
[TABLE]
of has scalar product with equal to . Hence, the product of these elements does not belong to if . **
8 Lie algebra representation
As an alternative to stereographic projection, the Lie algebra associated with the Lie group provides a more intuitive visualization in of the Minkowski products of unit quaternion sets. In this algebra, spatial rotations are represented by Euler vectors of the form , where is the rotation angle and the unit vector defines the rotation axis. With , any set of spatial rotations lies inside the sphere with center at the origin and radius in . This approach avoids mapping finite points to infinity, which was the case with stereographic projection in Section 5.
We recall that the elements of the Lie algebra are exactly all skew-symmetric real matrices. Thus,
[TABLE]
defines an isomorphism between the vector spaces and . It maps any vector to the matrix associated with the linear map . If the inverse isomorphism is denoted by
[TABLE]
then by direct computation one can verify that for all ,
[TABLE]
where is the commutator of and .
Each element of has the form with and
[TABLE]
where is a unitary element of .
Remark 8
If is unitary, then by direct computation111Here the vector is regarded as a column matrix, subject to the matrix product. we have
[TABLE]
and
[TABLE]
Consequently, the exponential map
[TABLE]
acts on as follows:
[TABLE]
The explicit form of the matrix defining a rotation by angle about a unit axis vector is well known, e.g., [1, p. 75].
Remark 9
If , then . Consequently, the logarithmic map acts on as follows:
[TABLE]
where the range of is .
Multiplication on induces, through the logarithmic map (16), an operation on defined by the Baker–Campbell–Hausdorff (BCH) formula [10, 19]. We give a brief introduction to this approach, and illustrate its use in visualizing Minkowski products of unit quaternion sets by some examples.
Definition 6** (Baker–Campbell–Hausdorff formula)**
We define as the unique function such that
[TABLE]
for all . The symbol is also used to denote the function mapping any pair to .
Note that expressions (6) and (7) suffice to determine the rotation angle and axis in the relation
[TABLE]
We now illustrate the Lie algebra approach by several computed examples.
Example 2
We consider (see Section 7) the great circles
[TABLE]
associated with the subsets of that comprise rotations about the and axes, respectively. We can visualize the Minkowski product as . The BCH operands can be parameterized as
[TABLE]
The set is a surface lying inside the sphere with center 0 and radius , as illustrated in Figure 1 (for reference, the spheres of radius 1 and are also shown). The hue value of the plot corresponds to the parameter .**
Example 3
Consider (see Section 7) the Minkowski product
[TABLE]
The former set is defined by a fixed rotation axis and variable rotation angle, and the latter corresponds to a fixed rotation angle with rotation axes varying in a neighborhood of the axis. The BCH operands are
[TABLE]
The -dimensional set is the union of a one–parameter family of surfaces.**
Example 4
Consider now the Minkowski product
[TABLE]
These sets have a fixed rotation angle , and rotation axes varying in neighborhoods of the and axes, respectively. The BCH operands are
[TABLE]
The -dimensional set can be regarded as the union of a two–parameter family of surfaces.**
9 Minkowski product boundaries
Thus far, we have investigated Minkowski products for specific 1–dimensional, 2–dimensional, and 3–dimensional subsets of . We now consider properties of the Minkowski product valid for any subsets of that have interior points in the topology of induced by . We note that, in this setting, and are interior points if and only if and include unit quaternion spherical caps and with and .
Theorem 3
Let and let , . Then is an interior point of if is an interior point of , or is an interior point of .
Proof : When is an interior point of , there exists a such that . Then by Remark 5,
[TABLE]
whence is included in , so is an interior point of . The case when is an interior point of is treated in the same fashion.
Corollary 2
Let be subsets of and let be their boundaries in the topology of . Then the boundary of in the topology of is included in .
The requirement that , is a necessary but not sufficient condition for . In general, products of points on and may generate interior points of , and it can be difficult to identify only those pairs of boundary points such that :
- •
may cover all of (and thus have no boundary) even in cases where and are proper subsets of ;
- •
it may happen for that
[TABLE]
where is an interior point of or is an interior point of ;
- •
if are -surfaces in then we cannot expect to coincide with by dimensional considerations.
All three phenomena can be observed in the next example:
Example 5
By Theorem 1, the equality holds for all . Now:
- •
if , then has no boundary;
- •
the product of the boundary points and equals the product of the interior points and ;
- •
if then, by direct computation, the product of two boundary points of belongs to if, and only if, ; therefore,
[TABLE]
is included in the interior of .
For the case of Minkowski sums of point sets in or , a necessary condition for the sum of boundary points and to belong to is well–known: namely, the normals to at must be linearly dependent — or, equivalently, the tangent spaces to and at and must be identical. This principle was extended to Minkowksi products of point sets in by interpreting points as complex numbers , and invoking the complex logarithm to transform Minkowski products into Minkowski sums [6, 7].
The situation with the Minkowski products of unit quaternion sets is more subtle, because the map is not a homomorphism from the multiplicative group to the additive group , i.e., in general
[TABLE]
Nevertheless, we can find a necessary condition using a different strategy. We begin by considering the case of spherical caps, before proceeding to state and prove a general result.
Lemma 3
Let and let be such that . Suppose that the boundaries in of the spherical caps and intersect at . Then belongs to the boundary of the Minkowski product in if, and only if, there exists an imaginary unit such that
[TABLE]
This happens if, and only if, is included in and the boundaries are tangent at .
Proof : By hypothesis, the scalar part of equals and the scalar part of equals . In this case, the scalar part of equals if, and only if, there exists an imaginary unit such that and . This happens if, and only if, is included in the (smaller) arc of the great circle in with endpoints and . This is the same as asking for to be included in and for to be tangent at .
Definition 7
Let . Then the boundary of in is tame if, for every point , the following conditions hold:
- (1)
* includes a spherical cap with , such that ;* 2. (2)
at , the set of all tangent vectors to curves in through spans a –plane, which we denote by and call the tangent plane to at , as usual.
In the situation described in the previous definition, coincides with the tangent plane to the –sphere at .
Remark 10
If is the closure in of an open connected subset of and its boundary is a smooth surface, then is tame.
Theorem 4
Let , be proper subsets of and assume that , are both tame. Let and . If belongs to , then
[TABLE]
Furthermore, for each spherical cap with whose boundary is tangent to at , and each spherical cap with whose boundary is tangent to at , we have
[TABLE]
Proof : Fix any spherical cap whose boundary is tangent to at , and any spherical cap whose boundary is tangent to at . We rotate to , and to in . After these rotations:
- •
the point belongs to both and ;
- •
is a spherical cap tangent to at ;
- •
is a spherical cap tangent to at ;
- •
.
Finally, since is obtained from by means of the rotation , we conclude that is equivalent to .
We now show that implies both the equality and one of the inclusions . We claim that
[TABLE]
Indeed, if were an interior point of then it would be an interior point of , contradicting our hypothesis. Lemma 3 allows us to deduce that one of and is included in the other, and that their boundaries are tangent at . As a consequence,
[TABLE]
as desired.
The previous theorem immediately implies the next corollary: a criterion to identify parts of that are not included in .
Corollary 3
Let be proper subsets of with tame boundaries, and let , . Suppose two spherical caps , exist, such that
neither cap includes the other; 2. 2.
both caps are included in ; 3. 3.
the boundaries of both caps are tangent to at .
Then
[TABLE]
In other words, does not include any point of , and does not include any point of .
Example 6
Let and set
[TABLE]
Consider the boundary point of . Then as a consequence of the previous corollary, for each proper subset of with tame boundary, the boundary does not include any point of .**
Theorem 4 inspires our last result, which identifies a sufficient condition for a product of points and to belong to .
Theorem 5
Let , for proper subsets , of . Assume that there exist and a spherical cap with and with
[TABLE]
Then
[TABLE]
Proof : Suppose, by contradiction, that is an interior point of
[TABLE]
Then would be an interior point of
[TABLE]
and since , this would contradict Lemma 3.
We mention that, in order to apply this sufficient condition, it is not necessary to assume that the tangent planes , are well–defined. However, if they are well-defined, then
[TABLE]
We also point out that, in the statement, the assumption is essential. This fact is illustrated in the next examples.
Example 7
If and then, although is a boundary point of , the Minkowski product
[TABLE]
admits no boundary points.**
Example 8
Fix and let , so that . Set
[TABLE]
and consider the boundary point of . Although , the point is an interior point of . Indeed, it can be obtained not only as the product of with itself, but also as the product of the two points and . These two points are interior points of because they are interior points of and because
[TABLE]
10 Closure
The characterization of the uncertainties in a compounded spatial rotation, arising from the ordered product of a sequence of individual rotations subject to prescribed uncertainties in their rotation angles and axes, is of fundamental interest in diverse contexts. Unit quaternion sets offer compact and intuitive representations for families of spatial rotations, and their Minkowski products describe the outcomes of all combinations of the individual rotations.
Whereas Minkowski sums have been extensively studied, and methods for computing them readily generalize to higher dimensions, Minkowski products have received less attention. Using complex–number multiplication to define products of points in , algorithms for the Minkowski products of planar sets are based upon invoking the complex logarithm to transform Minkowski products into Minkowski sums. However, the situation with unit quaternion sets is much more challenging, since (i) they reside in a non–Euclidean space, the 3–sphere ; and (ii) their product is non–commutative.
This preliminary study of the Minkowski products of unit quaternion sets describes some basic results and guiding principles for their systematic study. A family of unit quaternion sets that is closed under the Minkowski product — the spherical caps of — was identified, and some key results concerning sets defined by fixing either the rotation axis or rotation angle, and allowing the other to vary over a given domain, were also developed. To help visualize unit quaternion sets and their Minkowski products, mappings to based upon stereographic projection and the associated Lie algebra were proposed. Finally, general principles to identify boundary points of Minkowski products, for full–dimension operand sets with smooth boundaries, were analyzed.
The results presented herein serve to introduce the problem of computing Minkowksi products of unit quaternions, to establish some basic foundations, and to identify some possibilities and difficulties it entails. Through its depth and practical importance, this problem offers scope for much further study.
Acknowledgements
The second and fourth authors are partly supported by the Italian Ministry of Education (MIUR) through Finanziamento Premiale FOE 2014 “Splines for accUrate NumeRics: adaptIve models for Simulation Environments” and by Istituto Nazionale di Alta Matematica (INdAM) through Gruppo Nazionale per le Strutture Algebriche, Geometriche e le loro Applicazioni (GNSAGA).
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] S. L. Altmann (1986), Rotations, Quaternions, and Double Groups , Dover Publications (reprint), Mineola, NY.
- 2[2] P. Du Val (1964), Homographies, Quaternions, and Rotations , Clarendon Press, Oxford.
- 3[3] R. T. Farouki, W. Gu, and H. P. Moon (2000), Minkowski roots of complex sets, Geometric Modeling and Processing 2000 , IEEE Computer Society Press, 287–300.
- 4[4] R. T. Farouki and C. Y. Han (2004), Computation of Minkowski values of polynomials over complex sets, Numerical Algorithms 36 , 13–29.
- 5[5] R. T. Farouki and C. Y. Han (2005), Solution of elementary equations in the Minkowski geometric algebra of complex sets, Advances in Computational Mathematics 22 , 301–323.
- 6[6] R. T. Farouki, H. P. Moon, and B. Ravani (2000), Algorithms for Minkowski products and implicitly–defined complex sets, Advances in Computational Mathematics 13 , 199–229.
- 7[7] R. T. Farouki, H. P. Moon, and B. Ravani (2001), Minkowski geometric algebra of complex sets, Geometriae Dedicata 85 , 283–315.
- 8[8] R. T. Farouki and H. Pottmann (2002), Exact Minkowski products of N 𝑁 N complex disks, Reliable Computing 8 , 43–66.