Massive Random Access with Common Alarm Messages
Kristoffer Stern, Anders E. Kal{\o}r, Beatriz Soret, Petar Popovski

TL;DR
This paper models massive IoT access with correlated device activation and shared alarm messages, showing that correlation can enable ultra-reliable communication at the cost of spectral efficiency.
Contribution
It introduces a new model for massive access incorporating correlation and common alarms, along with an error probability framework including false positives.
Findings
Correlation enables high reliability in massive access
Shared alarms improve error performance
Trade-off between reliability and spectral efficiency
Abstract
The established view on massive IoT access is that the IoT devices are activated randomly and independently. This is a basic premise also in the recent information-theoretic treatment of massive access by Polyanskiy. In a number of practical scenarios, the information from IoT devices in a given geographical area is inherently correlated due to a commonly observed physical phenomenon. We introduce a model for massive access that accounts for correlation both in device activation and in the message content. To this end, we introduce common alarm messages for all devices. A physical phenomenon can trigger an alarm causing a subset of devices to transmit the same message at the same time. We develop a new error probability model that includes false positive errors, resulting from decoding a non-transmitted codeword. The results show that the correlation allows for high reliability at the…
Click any figure to enlarge with its caption.
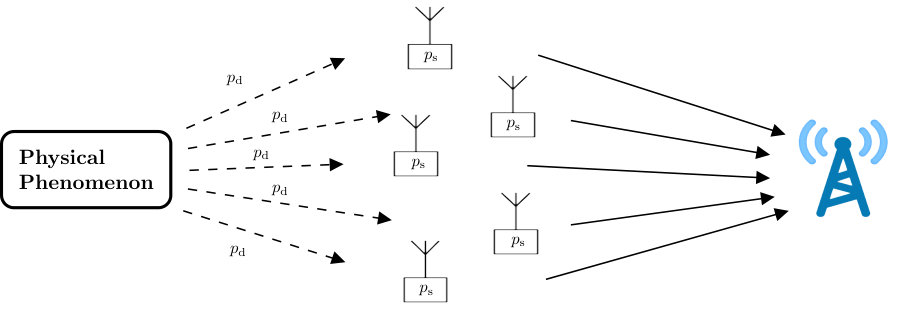 Figure 1
Figure 1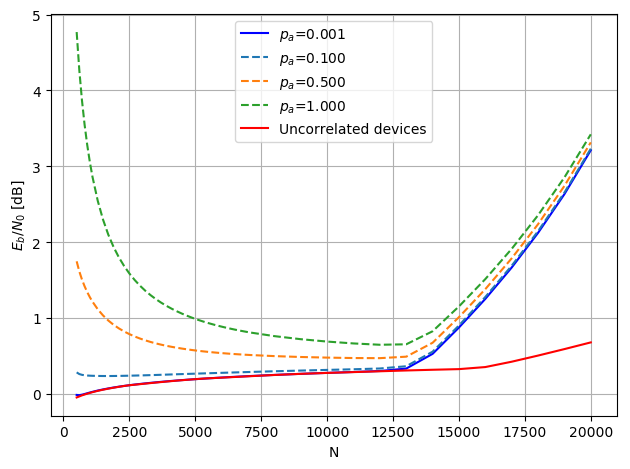 Figure 2
Figure 2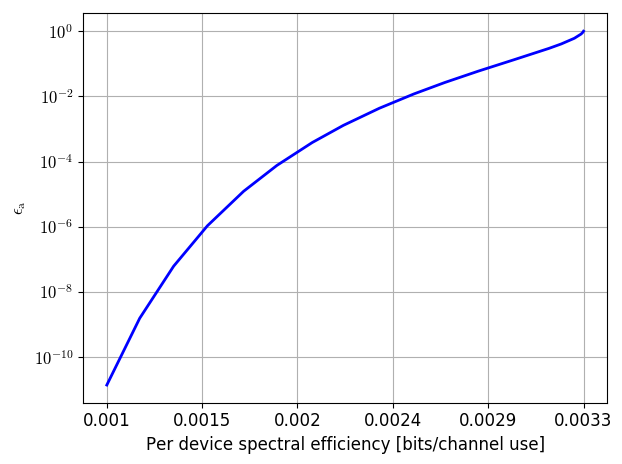 Figure 3
Figure 3| Notation | |||
|---|---|---|---|
| : | Alarm event | : | Target probability of error for alarm messages |
| : | Total number of devices | : | Target probability of error for standard messages in alarm event |
| : | Number of active devices | : | Target probability of false positive |
| : | Number of devices sending an alarm message | : | Spectral efficiency |
| : | Alarm probability | : | Entropy |
| : | Standard message probability | Message transmitted by the -th device | |
| : | Alarm detection probability | (lower case): | , for scalars/vectors |
| : | Set of standard messages | (upper case): | , for random variables/vectors |
| : | Set of alarm messages | : | Empty tuple |
| : | Blocklength | : | 0 |
| : | Average transmission power | Set of all -subsets of the set | |
| : | Maximal transmission power | : | Input alphabet |
| : | Target probability of error for standard messages without an alarm | : | Output alphabet |
| Classification of events | ||
|---|---|---|
| Error | No error | |
| No alarm | - A standard message is not decoded: | - A standard message is decoded: |
| - More than one device sends the same message: | - Different messages are sent: | |
| - At least one alarm message is decoded: | - No alarm message is decoded: | |
| (false positive) | (true negative) | |
| Alarm | - The alarm message is not decoded: | - The alarm message is decoded: |
| (false negative) | (true positive) | |
| - More than one alarm message is decoded: | - More than one device sends the same alarm message: | |
| - A standard message is not decoded: | ||
| - Two or more device sends the same standard | ||
| message: | ||
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
\usetikzlibrary
calc
\tikzsetevery picture/.style=line width=0.75pt
Massive Random Access with Common Alarm Messages
Kristoffer Stern, Anders E. Kalør, Beatriz Soret, Petar Popovski
Department of Electronic Systems, Aalborg University, Denmark
Email: [email protected], {aek, bsa, petarp}@es.aau.dk
Abstract
The established view on massive IoT access is that the IoT devices are activated randomly and independently. This is a basic premise also in the recent information-theoretic treatment of massive access by Polyanskiy [1]. In a number of practical scenarios, the information from IoT devices in a given geographical area is inherently correlated due to a commonly observed physical phenomenon. We introduce a model for massive access that accounts for correlation both in device activation and in the message content. To this end, we introduce common alarm messages for all devices. A physical phenomenon can trigger an alarm causing a subset of devices to transmit the same message at the same time. We develop a new error probability model that includes false positive errors, resulting from decoding a non-transmitted codeword. The results show that the correlation allows for high reliability at the expense of spectral efficiency. This reflects the intuitive trade-off: an access from a massive number can be ultra-reliable only if the information across the devices is correlated.
I Introduction
The interconnection of billions of devices within the Internet of Things (IoT) paradigm is one of the main challenges for future networks. Accordingly, the service structure of 5G, fully aligned with the ITU-R vision for IMT-2020, includes the massive Machine Type-Communication (mMTC) as one of the three core connectivity types. mMTC is typically defined through a scenario in which a massive number of IoT devices are connected to a Base Station (BS). The activation of the IoT devices is intermittent, such that at a given time, the IoT devices that are active and have a message to send constitute a random subset from the total set of devices [2]. A main use case for IoT is a distributed sensor network that intelligently monitors and manages a large number of devices [3]. The traffic in such systems can be (quasi-)periodic or event-driven [4]. In addition, source information and time correlations occur when many devices are sensing a common physical phenomenon.
The conventional multiple access channel (MAC) has been well characterized [5, 6, 7]. The main results here are derived using the fact that the probability of successful joint decoding goes asymptotically to one with increasing blocklength. However, in the context of mMTC the devices have small data payloads. Even though a small subset of the devices are active simultaneously, the large total number of devices (up to in a single cell [8]) means that the number of active devices can still be comparable to the blocklength. This results in finite blocklength (FBL) effects. A number of works have addressed the problem of massive access [9, 8]. However, in terms of theoretical rigor and fundamental results two works stand out, both of them assuming independent traffic. The first one is on the many-access channel by X. Chen et al. [10]. This paper shows the scaling of the number of users with the blocklength. On the other hand, Y. Polyanskiy provides a model in [1] that is closer to the way massive access is commonly understood. Key elements of the model are devices employing the same codebook which precludes the identification of users and the error measure is done on a per-device basis. This has also been called unsourced random access [11].
In this we build upon the model in [1] with an important extension: we bring in the correlation of activation and message content across different devices. This is different from the mainstream view on massive random access, where the device activation and message content is independent across the devices. An exemplary case is as follows: IoT devices can send standard messages or alarm messages, the latter with critical reliability requirement and triggered by a commonly observed phenomenon. In normal operation, standard uncorrelated messages are sent. Upon the alarm activation, a number of IoT devices will prioritize it and send the same message. This reflects the extreme all-or-nothing correlation where devices are either mutually independent, or they are completely correlated both in source information and in time. Our model intends to capture the following intuitive observation. If the number of devices that transmit the same alarm message increases, then the reliability of the alarm message increases at the expense of the decrease of the total amount of information that comes from the total population of connected IoT devices. The model can be seen as having an (alarm) event that needs to be communicated through a random subset of devices, see Fig. 1. By removing the alarm event the model boils down to the model in [1].
Differently from previous works, the per-device probability of error is not meaningful for devices transmitting the alarm event in our model. Instead, the common alarm itself can be seen as a “ghost” device, which communicates through the actual IoT devices (see Fig. 1) and we calculate the error probability with respect to this ghost device. In addition, the fact that we consider two message types (standard and alarm messages) necessitates the introduction of false positive errors, namely decoding a codeword that was not transmitted. In the system model in Fig. 1, decoding an alarm message when no alarm has occurred is critical. This type of error is, typically, not considered in a common communication-theoretic setting, where an error is defined as the event in which a decoder is not decoding a codeword correctly.
The rest of the paper is organized as follows. Section II introduces the system model including the source information and time correlations. In Section III the entropy and the spectral efficiency of the correlated devices is derived. Section IV defines the alarm random access code based on the novel error model, and the error bound is derived in Section V. Finally, numerical evaluations are presented in Section VI, and concluding remarks are given in Section VII. Table I lists the notation used in this paper.
II Correlation Model
We consider the uplink in a random access channel in which each access opportunity is a block of channel uses. In each block, out of devices transmit a message from one of the two disjoint message sets and , consisting of standard messages and alarm messages, respectively. A typical case is having a stringent reliability requirement for the alarm messages, and a high throughput and massive access requirement for the rest. As also done in [1], we assume that the number of active devices, , is known by the receiver.
Let be a memoryless multiple access channel (MAC) satisfying permutation invariance where are the input and output alphabets. That is, the distribution coincides with for any and any permutation . This assumption relates to the fact that no user identification is done at the receiver, i.e. unsourced random access [11]. Therefore, all devices use the same encoder and the receiver decodes according to the possibly randomized map , where is the random number of devices that send alarm messages and denotes the set of all -subsets of the set .
We denote the message transmitted by the -th device as . The transmitted messages are chosen according to the following model: An alarm event, , occurs with probability , and there is no alarm with probability . If no alarm occurs then the system acts as in [1], i.e. each device transmits a message uniformly chosen from with probability , and it is silent with probability . If an alarm occurs, with probability a device will detect it and transmit an alarm message. Contrary to the standard messages, all devices detecting the alarm send the same message chosen uniformly from . With probability the device will act as if no alarm has occurred. It follows that and . Notice that the probability in our model is the joint event of detecting an alarm and deciding to transmit a corresponding alarm message. The latter can be seen as a system design parameter and its impact to the system performance, particularly in the tradeoff between reliability and spectral efficiency, is discussed in next section.
In contrast to practical random access scenarios, we assume that the number of active devices, , is known by the receiver. This assumption can be justified by noting that could be estimated using the same procedure as in [12]. Specifically, the base station can decode the received packets under the assumption that , and then re-generate the resulting packets and subtract them from the received signal. can then be determined based on the residual, which will equal the noise , see (12) if the correct value of has been determined. Furthermore, since the number of alarm messages, , is assumed unknown in the model, an incorrectly estimated will mainly affect the decoding of the non-critical standard messages.
III Spectral efficiency
In this section, we study how the presence of common alarm messages affects the information transmitted in the system. We consider the system spectral efficiency defined as , where is the number of devices transmitting messages , is the joint entropy function and is the blocklength.
The total number of devices, , in the network affects the system spectral efficiency. To see this, consider the case with a high alarm detection probability , a low , alarm probability , and suppose we receive messages, i.e. . If also , then there is a high probability that an alarm has occurred since we know that all devices transmitted and that is high. Moreover, in this case all devices have most likely transmitted the same message, resulting in a low spectral efficiency. On the other hand, with devices in the network the probability that an alarm has occurred is low, being unlikely that devices do not detect an alarm when is high. In this case, the messages are likely to be distinct, resulting in a high spectral efficiency.
The exact expression for the system spectral efficiency for this model is stated in Theorem 1.
Theorem 1**.**
For out of received messages and correlated devices as describe in Section II the system spectral efficiency, , is
[TABLE]
where is given by
[TABLE]
and
[TABLE]
Proof of Theorem 1 can be found in Appendix A.
For or (i.e. no correlation) the system spectral efficiency is the well-known as in [1].
IV Alarm Random Access Codes
We now define a random access code that allows for reliability diversity for standard and alarm messages. This entails having different error events for the two message types. Specifically, in order to capture the characteristics of alarm messages, we introduce reliability constraints that relates to the certainty of decoding alarm messages in the event of an alarm, but also to the certainty of not decoding alarm messages when no alarms has occurred (false positives). This is different from usual analysis since we need not only consider the event of incorrectly decoding a message, but also the type of message that is decoded instead.
The error events are listed in Table II, where we have included the “No error” column to emphasize the opposite characteristics of alarm messages and standard messages. We define error events for standard messages as in [1], i.e. errors are considered per-device and the event that more than one device sends the same standard message results in an error. In contrast, no error occurs if multiple devices transmit the same alarm message. Similarly, decoding distinct alarm messages also results in an error since only one alarm is assumed to be active at a time, while decoding distinct standard messages is naturally not an error. Formally, we define the following error events: is the event of not decoding the message from the -th device, for is the event of not decoding an alarm message or decoding more than one, and is the event of decoding any alarm message (which is an error when no alarm has occurred). This leads to the following definition of a -user alarm random access (ARA) code.
Definition 2**.**
An alarm random access (ARA) code for the -user channel is a pair of (possibly randomized) maps, the encoder , and the decoder satisfying
[TABLE]
where , when there is no alarm and , in the alarm event for a random number, , alarm messages.
The left hand side of (8) is the probability of not decoding or resolving the alarm message in the alarm event. The left hand side of (9) is the average per-device error probability when there is no alarm, and (10) refers to the case when there is an alarm. Lastly left hand side of (11) is the probability of false positives. In a practical scenario the entities , , and can be treated as reliability requirements, in which case the achievability of an ARA code is of interest.
In the remainder of the paper we limit the analysis to the Gaussian MAC (GMAC) given by
[TABLE]
where is a standard Gaussian noise vector. Additionally a maximal average transmission power, , is included. That is we require . This model is based on the assumption that the blocklength is short enough to be within the coherence time of the channel. This allows for the devices to do channel inversion and precode their signals so that they add up coherently at the receiver. This gives the possibility of a very high reliability for alarm messages.
V Random Coding Error Bound
The achievability conditions for an ARA code are presented in Theorem 3, which provides bounds for the error probabilities , , and for a given blocklenght , message set sizes and , average transmission power , and maximal transmission power .
Theorem 3**.**
Fix . There exists an alarm random access code for the -user GMAC satisfying power-constraint and
[TABLE]
Defining and , then related to (13):
[TABLE]
Related to (16):
[TABLE]
Related to (14)
[TABLE]
where , is a -subset of true standard messages and is codeword corresponding to message . Related to (15):
[TABLE]
Proof of Theorem 3 can be found in Appendix B.
VI Numerical evaluation
The bounds in Theorem 3 are given for a fixed number of active devices, , but the probability of a given value of depends on whether an alarm has happened or not. Therefore, we consider the average bound over the distribution of conditioned on the alarm state and the total number of devices, . The distribution of given an alarm is
[TABLE]
and the distribution of given no alarm is
[TABLE]
We first study the trade-off between the probability of error for alarm messages and the per-device spectral efficiency , during the event of an alarm. We consider a setting with 1000 devices and a blocklength of $n=$30\,000. The alarm and standard messages are and bits, respectively. The probability of activation when there is no alarm is , and the transmission power is chosen such that the target average error bound for standard messages is {10}^{-1}, and the probability of false positive alarms is below $\epsilon_{\mathrm{fp}}=${10}^{-5}. Having only a few bits for alarm messages is a realistic setting, e.g. in a sensor network the alarm could be that a sensed value is too high or too low resulting in only one bit needed for the alarm message.
In Fig. 2 it can be seen that the probability of error increases for increasing spectral efficiency (decreasing ). Notice that the maximum spectral efficiency is achieved when the error probability is one (or equivalently, ), i.e. no alarm messages are detected. This is expected since a higher number of devices transmitting alarm messages reduces the per-device spectral efficiency, but increases the received signal-to-noise ratio of alarm messages. Furthermore, very high reliability is achievable. This trade-off between spectral efficiency and probability of error is not surprising since this is also the case when the blocklength or message set size are changed. The novelty is in the fact that it is the correlation between devices that causes the trade-off.
We now consider the minimal average transmission power, , required to satisfy some target error probabilities. We assume no power restriction. That is in Theorem 3. Let all parameters be fixed except and . This is an optimization problem on the form
[TABLE]
The constraint functions are strictly increasing for decreasing values of and , and the first two constraints do not depend on . Therefore, the problem can be efficiently solved using bisection by first minimizing subject to the first two constraints, and then determine from the last two constraints using the from the previous step. This provides a feasible solution for the values of and of interest in this paper. However, if no feasible can be obtained from the second step, then a solution can be found by setting and minimizing subject to the last two constraints.
We use the same system parameters as in the previous scenario, except that we now fix {10}^{-5} and $\epsilon_{\mathrm{s}}=\epsilon_{\mathrm{sa}}=${10}^{-1}. Based on the optimal and the values of , , we evaluate the minimal average energy-per-bit .
In Fig. 3 the solid blue line shows the energy-per-bit as a function of total number devices, , for this setup. Notice that optimization is done for each . Additionally, the achievable energy-per-bit for the uncorrelated case is included for reference, and is obtained as described in [1] but without the transmission power restriction. It can be seen that almost the same energy-per-bit is achievable for correlated and uncorrelated devices up to approximately devices, where the energy-per-bit required in the correlated case starts to increase significantly. This is due to the fact that the bound for false positives starts to dominate the choice of . Thus, due to high multi-access interference, the probability of decoding a false positive is higher than the probability of failing to decode a standard message. The increase in power needed to accommodate the false positive target probability causes the error probability of standard messages to go well below their target error probability . In fact, with more than devices the error bound for standard messages is also approximately . This is similar to the behavior in the uncorrelated case where the finite blocklength penalty is the dominating constraint when is small, while multi-access interference dominates for large [1]. This is seen in the increase in the slope at around devices in the uncorrelated case.
The effect of increasing alarm probability, , can be seen as the dashed curves in Fig. 3. The energy-per-bit is higher for larger due to the increased rate of alarm events where spectral efficiency is lower. The energy-per-bit in alarm events corresponds to the curve for . Notice that the energy requirement and the probability are not altered by varying since the error probabilities for ARA codes are conditioned on the occurrence of an alarm. The high energy-per-bit for small and high is due to the large number of devices (relative to ) that must devote their resources to a single alarm message in order to accommodate the target alarm reliability. In general, the curves corresponding to different values of are approaching each other for increasing . This is caused by the almost constant number of alarm messages required to achieve the alarm target reliability. For increasing this ratio of alarm messages to standard messages grows and the traffic will be mostly standard messages.
VII Conclusions
We have studied the trade-off between reliability and spectral efficiency in a massive random access scenario where the devices can send standard messages or alarm messages. The alarm messages are triggered by a common physical phenomenon and introduce correlation in both the transmitted messages and the activation of devices. We derive the system spectral efficiency and propose an achievability bound for alarm random access codes. We show that very reliable transmissions of alarm messages can be achieved, but that the correlation causes a trade-off in spectral efficiency. In particular, when the multi-access interference is moderate, the cost of providing high reliability of alarm messages is small in terms of the average energy-per-bit. However, when multi-access interference is high, the probability of decoding a false positive alarm message dominates the error probabilities, and the cost of providing high reliability is significant.
Appendix A Proof of Theorem 1
To explicitly show the dependency on the number of messages define
[TABLE]
as the event that the first out of devices transmit and the rest are silent. Due to symmetry in the devices, and without loss of generality, we assume the first devices that are transmitting. By the law of total probability this event has probability
[TABLE]
System spectral efficiency, , is defined as where the joint entropy of all messages can be expressed using the chain rule for entropy [13, Theo. 2.5.1] as
[TABLE]
Thus we need to express the conditional entropy given by
[TABLE]
where
[TABLE]
for .
Observe that and are disjoint so that we can split each sum in (47) into two sums over and . For convenience, we define the set as the set of -subsets of that contain at least one alarm message and rewrite (47) as
[TABLE]
We first derive an expression for using the fact that at least one of belongs to . We additionally split the sum in (48) into two sums; one over and one over :
[TABLE]
Using Bayes’ theorem we obtain
[TABLE]
Since all devices that detect the alarm transmit the same message, the first term in (50) is
[TABLE]
Similarly, for the summation over in (50) we obtain
[TABLE]
Since the standard messages are not mutually exclusive, and equally likely, it follows that the second term in (50) becomes
[TABLE]
Substituting (52) and (54) into (50) yields .
We now derive an expression for in (49). Let denote the (random) number of alarm messages in and, without loss of generality, assume that the alarm messages occupy the first positions of , i.e. and . For a fixed , the probability is obtained using Bayes’ theorem as
[TABLE]
where is given as in (3). Notice that as before only one alarm message is used at a given time so is not raised to the power of . Since there are exactly equiprobable and disjoint message sets consisting of alarm messages and standard messages, the first term of (49) can be expressed as
[TABLE]
We now consider the second term in (49). Here the conditional messages in and messages in are all standard messages. In contrast to the previous case, this can happen both when there is no alarm, and when there is alarm but none of the devices detect it. As before, we rewrite (48) as
[TABLE]
Since each alarm message is equally likely, applying Bayes’ theorem and the law of total probability repeatedly yields
[TABLE]
Similarly, for we obtain
[TABLE]
Therefore we get
[TABLE]
Finally, is given by
[TABLE]
Using (63) and (64), the last term in (49) can be expressed as
[TABLE]
Inserting (57) and (66) into (47) yields the final expression:
[TABLE]
∎
Appendix B Proof of Theorem 3
Generate the codewords . We assume that the first codewords are alarm messages and the last codewords are standards messages. Recall that is the codeword selected by the -th device. If then device transmits instead, i.e. , otherwise , . Decoding is done in two steps. The transmitted alarm message (if any) is decoded first and canceled from the received signal, and then the decoder proceeds to decoding the standard messages. Notice that the order of decoding reflects the fact that alarm messages are expected to have a higher reliability requirement than standard messages.
In the first step, the decoder estimates the transmitted alarm message and the number of devices transmitting the alarm message :
[TABLE]
If the decoder outputs as the alarm message and zero otherwise. The estimated interference from the alarm messages is subtracted from the received signal in a successive interference cancellation fashion as . Next the decoder outputs the set of standard messages
[TABLE]
We consider Gallager type bounds [14]. Initially we ignore the power constraint and assume that the transmitted codewords are instead of . Furthermore, we assume that are drawn without replacement from . The contributions from these assumptions will be taken into account later. We consider each of the four bounds in the theorem separately.
B-A Alarm decoding error
We start with the bound in (13), i.e. the probability of not decoding an alarm message in the alarm event, denoted by . From symmetry we assume that devices are transmitting alarm message . We want to bound . Define the interference as , where we note the dependency on . We then have . Let be a random index in and let be some integer. Then by definition of the decoder (68) an error occurs if
[TABLE]
i.e. if the distance, in -norm, from a multiple of a wrong codeword to the received signal is smaller than from the true alarm transmissions . We therefore define the error event
[TABLE]
We want to bound the probability of this event for all possible combinations of and , thus we define the collection of events
[TABLE]
and
[TABLE]
Clearly, since the decoder is designed to only output one alarm message, thereby eliminating the possibility of collision of alarm messages at the decoder.
We first use the fact that is a sum of Gaussian random vectors and hence is also Gaussian, and obtain the bound
[TABLE]
where , and where . The bound in (74) follows from the Chernoff bound [15] and (75) uses the identity [1]
[TABLE]
where , , and ).
Next we use Gallager’s -trick [14] to bound . For events and we have . We get
[TABLE]
Taking expectation over and using (78) yields
[TABLE]
where and . Now in the same manner as in (80)-(82) expectation is taken over and where (78) is used for both. We get
[TABLE]
where and . Introducing and applying the union bound gives
[TABLE]
Finally, we take the expectation over . The distribution of is a binomial distribution given by
[TABLE]
where the normalization coefficient arises because of the certainty that devices were active. It follows that
[TABLE]
We now consider the impact of the power constraint. Since the standard messages are treated as interference in this bound, we ignore the power constraint for the standard messages as the bound is still valid. For the alarm messages only one is active at a given time, so we add the following term to the error probability:
[TABLE]
where . This gives the bound in (13).
B-B False positive alarms
We now turn to the bound in (16), i.e. the bound for the probability of false positive alarms, . In this case the true , and a false positive occurs if the decoder outputs . Let and . We define the error event
[TABLE]
The only difference between the error event and is the absence of the true alarm messages. Therefore we define
[TABLE]
and
[TABLE]
We have that . As in Section B-A we use the Chernoff bound and the identity (78), and take the expectation over to get the bound
[TABLE]
where and . Using Gallager’s -trick we obtain
[TABLE]
Taking the expectation over and , and applying the union bound over , we get the bound
[TABLE]
where for and .
Similar to the previous case, constraining the transmission power results in less interference and hence lower error probability. Therefore, the bound given by (97) is still an upper bound on the error probability in the power constrained case, and no additional term is needed.
B-C Standard message error with no alarm
We now consider the bound in (14), i.e. the bound for the per-device probability of error for standard messages when no alarm has occurred, . Since the standard message decoder relies on canceling the interference caused by the alarm messages, we assume that correct decoding of standard messages can only occur if the decoder does not output a false positive alarm. If there is no false positive, the scenario coincides with the one derived in [1] given by in (27). Since the probability of a false positive alarm is bounded by , the probability of error is bounded as
[TABLE]
The bound above ignores the impact of power constraint for the interfering standard messages. However, as in the previous section, the bound is still valid in the case of a false positive alarm. When no false positive alarm is decoded, the power constraint and collision error of standard messages are accounted for in through the last two terms in (27) as derived in [1].
B-D Standard message error with alarm
Finally, we turn to the bound in (15), i.e. the average per-device probability of error for the standard messages in the alarm event, . As in Section B-C, we assume that there is automatically an error if the alarm is incorrectly decoded. Assume that the first devices are transmitting the alarm message . The probability of error for standard messages is bounded by the probability that the alarm is incorrectly decoded or the standard messages are incorrectly decoded after correctly canceling the interference from alarm messages. Since the probability for the latter event is bounded by we obtain
[TABLE]
where is given by (85).
To derive a bound on we consider the complementary event . Let and , and define error event
[TABLE]
This event is similar to the error event with the exception that here the alarm message is known. We define
[TABLE]
and, as in Section B-A, use the Chernoff bound and the identity (78) with the expectation over to get the bound
[TABLE]
where . Taking the expectation over and using (78) we have
[TABLE]
where and . Finally, the union bound over is used to get
[TABLE]
It follows that . Substituting this into (102) and taking expectation over as in Section B-A gives
[TABLE]
The bound above already includes collisions and the power constraint in the decoding of standard messages through . However, we still need to include the power constraint of the alarm messages. As in Section B-A, this is done by adding to each of the two error event bounds and . By defining the final bound becomes
[TABLE]
∎
Acknowledgment
This work has been in part supported the European Research Council (ERC) under the European Union Horizon 2020 research and innovation program (ERC Consolidator Grant Nr. 648382 WILLOW) and Danish Council for Independent Research (Grant Nr. 8022-00284B SEMIOTIC).
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] Y. Polyanskiy, “A perspective on massive random-access,” in 2017 IEEE International Symposium on Information Theory (ISIT) , June 2017, pp. 2523–2527.
- 2[2] 3GPP, “Service requirements for machine-type communications,” TS 22.368 V 14.0.1, June 2017.
- 3[3] IEC, “White paper: Internet of things: Wireless sensor networks,” Inernational Electrotechnical Commission, Tech. Rep., November 2014.
- 4[4] N. Nikaein, M. Laner, K. Zhou, P. Svoboda, D. Drajic, M. Popovic, and S. Krco, “Simple traffic modeling framework for machine type communication,” in ISWCS 2013; The Tenth International Symposium on Wireless Communication Systems , Aug 2013.
- 5[5] E. Plotnik and A. Satt, “Decoding rule and error exponent for the random multiple-access channel,” in Proceedings. 1991 IEEE International Symposium on Information Theory , June 1991, pp. 216–216.
- 6[6] R. Ahlswede, “Multi-way communication channels,” in Second International Symposium on Information Theory: Tsahkadsor, Armenia, USSR, Sept. 2-8, 1971 , 1973.
- 7[7] R. Gallager, “A perspective on multiaccess channels,” IEEE Transactions on Information Theory , vol. 31, no. 2, pp. 124–142, March 1985.
- 8[8] C. Bockelmann, N. Pratas, H. Nikopour, K. Au, T. Svensson, C. Stefanovic, P. Popovski, and A. Dekorsy, “Massive machine-type communications in 5g: physical and mac-layer solutions,” IEEE Communications Magazine , vol. 54, no. 9, pp. 59–65, September 2016.