Distributed control and game design: From strategic agents to programmable machines
Dario Paccagnan

TL;DR
This paper explores decentralized control of large-scale systems through game theory, analyzing equilibrium efficiency and designing utility functions to achieve near-optimal collective behavior without centralized coordination.
Contribution
It introduces new bounds on equilibrium strategies, scalable algorithms for equilibrium convergence, and a novel framework for utility design in cooperative resource allocation.
Findings
Bound on the distance between Nash and Wardrop equilibria
Scalable algorithms guiding agents to equilibrium
Framework for utility design ensuring near-optimal equilibria
Abstract
Large scale systems are forecasted to greatly impact our future lives thanks to their wide ranging applications including cooperative robotics, mobility on demand, resource allocation, supply chain management. While technological developments have paved the way for the realization of such futuristic systems, we have a limited grasp on how to coordinate the individual components to achieve the desired global objective. This thesis deals with the analysis and coordination of large scale systems without the need of a centralized authority. In the first part of this thesis, we consider non-cooperative decision making problems where each agent's objective is a function of the aggregate behavior of the population. First, we compare the performance of an equilibrium allocation with that of an optimal allocation and propose conditions under which all equilibrium allocations are efficient.…
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4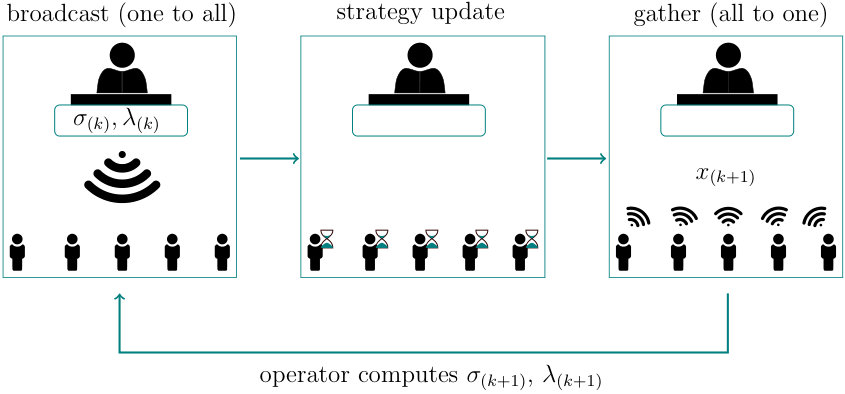 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12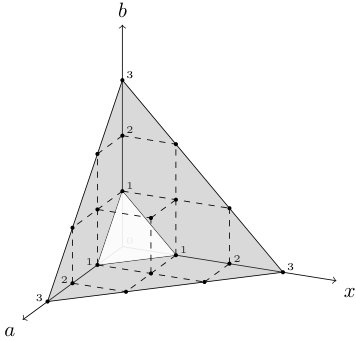 Figure 13
Figure 13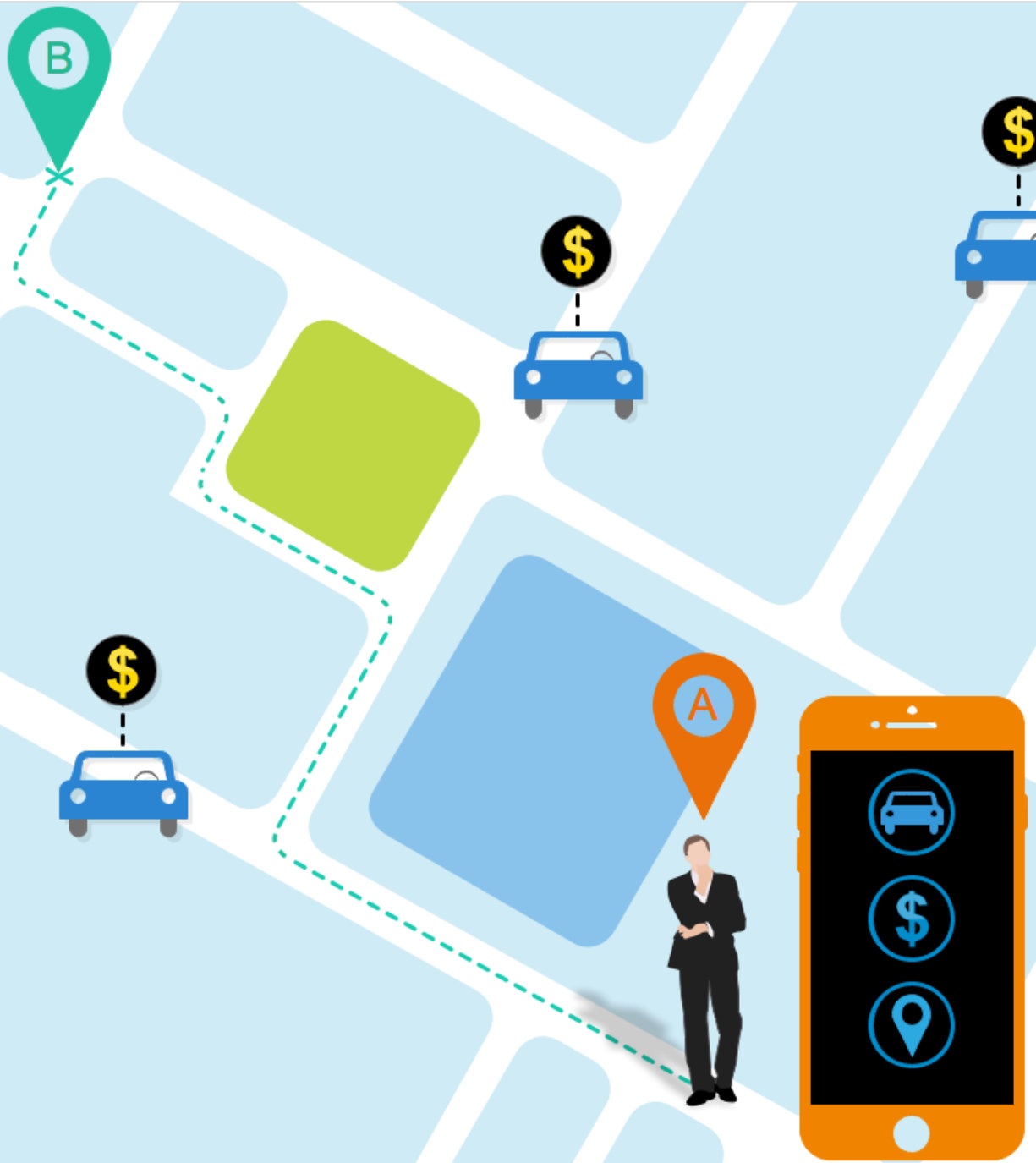 Figure 14
Figure 14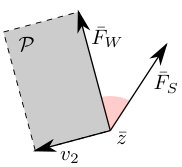 Figure 15
Figure 15Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.