Joint Blocklength and Location Optimization for URLLC-enabled UAV Relay Systems
Cunhua Pan, Hong Ren, Yansha Deng, Maged Elkashlan, and Arumugam, Nallanathan

TL;DR
This paper proposes a joint optimization of blocklength and UAV location in UAV relay systems to meet URLLC requirements, using a novel iterative algorithm that outperforms existing methods.
Contribution
It introduces a perturbation-based iterative algorithm for joint blocklength and location optimization in UAV relay systems under URLLC constraints.
Findings
The proposed algorithm achieves performance comparable to exhaustive search.
It significantly outperforms existing algorithms in simulation.
The method effectively minimizes decoding error probability under latency constraints.
Abstract
This letter considers the unmanned aerial vehicle (UAV)-enabled relay system to deliver command information under ultra-reliable and low-latency communication (URLLC) requirements. We aim to jointly optimize the blocklength allocation and the UAV's location to minimize the decoding error probability subject to the latency requirement. The achievable data rate under finite blocklength regime is adopted. A novel perturbation-based iterative algorithm is proposed to solve this problem. Simulation results show that the proposed algorithm can achieve the same performance as the exhaustive search method, and significantly outperforms the existing algorithms.
Click any figure to enlarge with its caption.
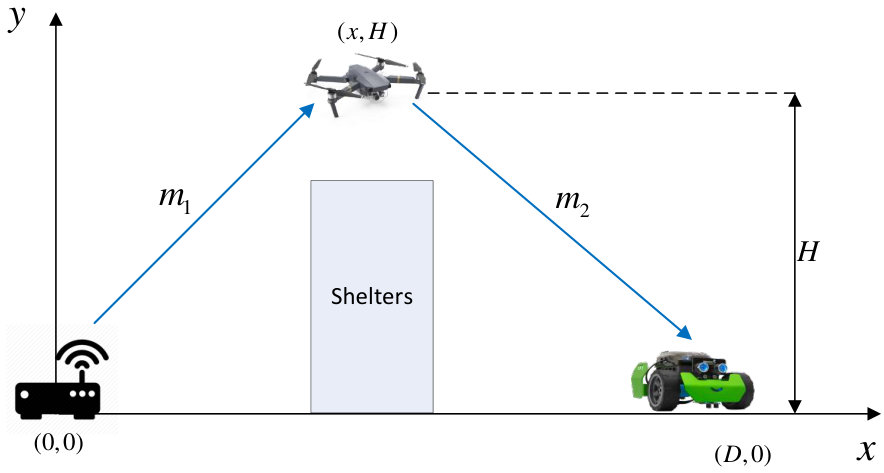 Figure 1
Figure 1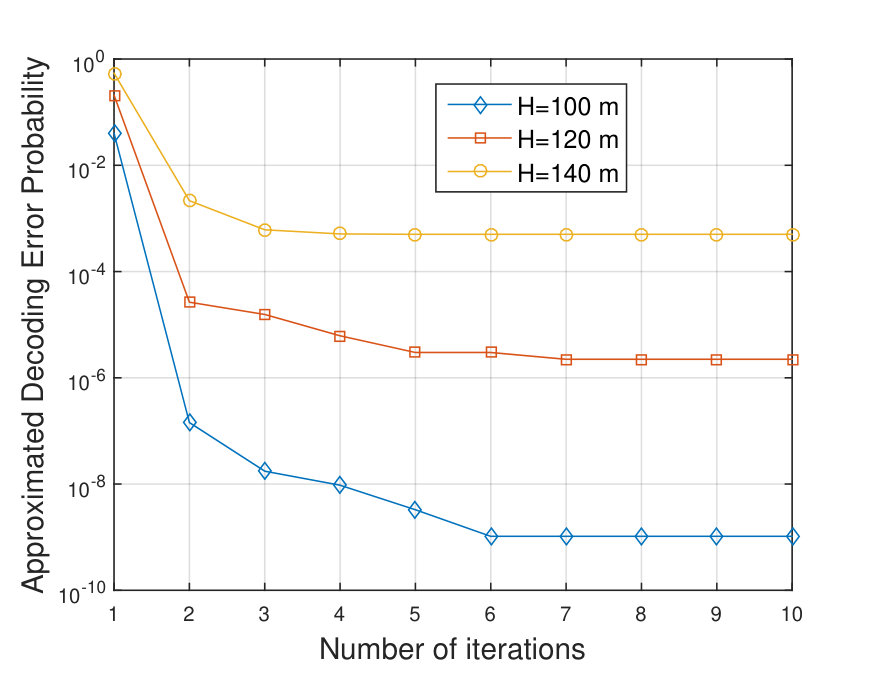 Figure 2
Figure 2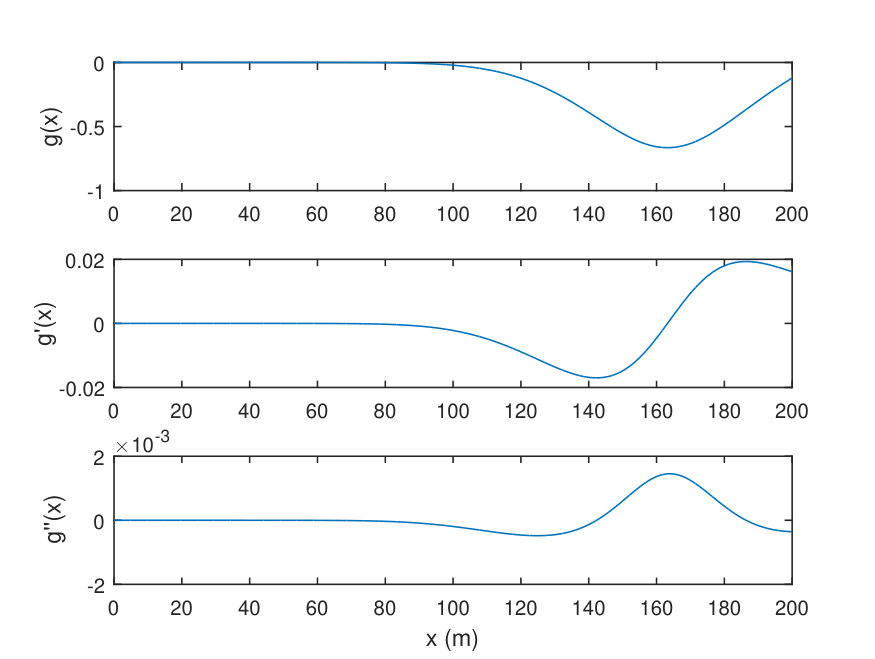 Figure 3
Figure 3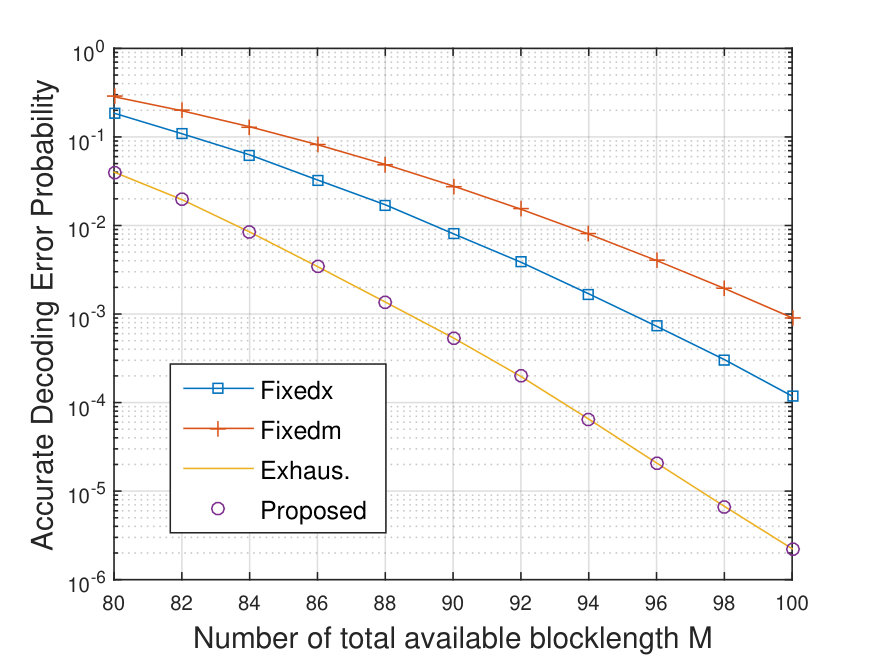 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUAV Applications and Optimization · Wireless Communication Security Techniques · Advanced Wireless Communication Technologies
Joint Blocklength and Location Optimization for URLLC-enabled UAV Relay Systems
Cunhua Pan, Hong Ren, Yansha Deng, Maged Elkashlan, and Arumugam Nallanathan
Abstract
This letter considers the unmanned aerial vehicle (UAV)-enabled relay system to deliver command information under ultra-reliable and low-latency communication (URLLC) requirements. We aim to jointly optimize the blocklength allocation and the UAV’s location to minimize the decoding error probability subject to the latency requirement. The achievable data rate under finite blocklength regime is adopted. A novel perturbation-based iterative algorithm is proposed to solve this problem. Simulation results show that the proposed algorithm can achieve the same performance as the exhaustive search method, and significantly outperforms the existing algorithms.
I Introduction
UAV-assisted communication has attracted extensive attention due to its fast deployment and favorable channel gain [1]. UAVs can also serve as relays to provide wireless connectivity between two devices without direct communication links [1, 2, 3, 4, 5]. Joint relay trajectory and power allocation was studied in [2]. In [3], UAV node placement and communication resource allocation were jointly optimized. In [4], Zhang et al. studied the joint trajectory and power optimization to minimize the outage probability. In [5], the throughput maximization problem was studied for a two-user broadcast channel, which can be regarded as a decode-forward relay system where each hop has the same rate.
In 2017, URLLC has been regarded as one of three pillar applications that should be supported in the 5G communications [6]. Applications requiring URLLC services include factory automation, autonomous driving, remote surgery, etc. In URLLC, short packet transmission is normally selected to support the low-latency transmission [7]. In this case, the conventional Shannon’s capacity based on the law of large numbers is no longer applicable. The achievable capacity under short packet regime was first derived in [8], which is a complicated function of the system parameters.
Recently, [9] and [10] considered the delay issues in UAV communications. Mean packet transmission delay minimization problem was studied in [9] with multi-layer UAVs, while minimum-rate ratio for each user was considered in [10] to flexibly adjust the percentage of its delay-constrained data traffic. However, the latency requirement was not considered in [9, 10], and the Shannon’s capacity formula was adopted.
In this paper, we consider a downlink communication system in a frontline as shown in Fig. 1, where a central controller needs to send command information to a distant robot that performs certain reconnaissance missions in a military area. For concealment, shelters with thick cement/metal walls are built between the outside controller and the military area. Hence, the channel gain between the controller and the robot is weak and negligible, and requires a UAV to fly above the shelter to assist the transmission between the controller and the robot. We aim for jointly optimizing the location of the UAV and blocklength allocation of the UAV and the controller to minimize the decoding error probability subject to the latency and location constraints. To solve this problem, we propose a novel perturbation-based iterative algorithm to alternatively optimize the location and the blocklength. Our results show that the proposed low-complexity algorithm achieves almost the same performance as the exhaustive search method, and performs much better than the existing algorithms.
II System Model
As shown in Fig. 1, we consider a two-dimensional UAV-enabled military surveillance scenario111In this paper, we consider only one UAV and one robot since it may be easily discovered by the enemies with more UAVs and robots. In addition, the expression of the decoding error probability for multiple UAVs and robots is very complicated and difficult to optimize, which will be left for future work., where the UAV hovers at above the horizontal line between the controller and the robot222It is obvious that better system performance can be achieved with high channel power gains, which is the case when the UAV hovers above the line between the controller and the robot., with as the fixed altitude. The locations of controller and robot are and . The packet size of the command signal is bits, whose transmission needs to be completed within seconds. Then, the overall blocklength is [7], where is the system bandwidth. Each transmission period has two phases, i.e., the first phase corresponds to the transmission from controller to UAV, while the second is from UAV to robot. The blocklength allocated for each phase is given by and , respectively. The transmission powers from controller and UAV are fixed as and , respectively.
The channel power gain from the controller to the UAV, and that from the UAV to the robot are denoted as and , respectively. According to the measurement result in [11], the LOS probability is close to one when the UAV is above a certain altitude (e.g. 120 m), and the free space channel model can be adopted. Thus, and can be represented as
[TABLE]
where is channel power gain at a reference distance of meter.
According to [8], to transmit a short packet of size within symbols, the decoding error at the UAV is given by , where with 333The noise is normalized to unit. and . Similarly, the decoding error probability at the robot is given by , where .
We consider that the UAV acts as a decode-and-forward (DF) relay. Then, the overall decoding error probability from the controller to the robot is given by
[TABLE]
To enable URLLC, we aim to jointly optimize the location of the UAV and the blocklength for two phases to minimize the overall decoding error probability under the latency/blocklength constraint. Thus, the optimization problem can be formulated as
[TABLE]
where (3b) specifies the feasible region for that mainly depends on the shape of the shelters, is the positive integer set. Problem (3) is difficult to solve due to: 1) the objective function is not jointly convex w.r.t. the optimization variables; 2) even with fixed blocklength or location, the objective function is not convex w.r.t. the location or the blocklength.
III Low-complexity Algorithm
In this section, we develop a low-complexity iterative algorithm to solve Problem (3). In particular, we first find the optimized blocklength with fixed location , and then find the optimal location by fixing the blocklength allocation, and at last alternatively solve each subproblem until convergence.
III-A Optimize Blocklength Allocation with Fixed
With fixed UAV location , the channel gains and are fixed according to (1). Then, we only need to optimize the blocklength. Remind that the expression of objective function in (2) is very complicated. To handle this difficulty, we note that to guarantee the extremely low error probability for the whole link, the error probability for each link should be sufficiently small. In this case, we can approximate the overall error probability as . In the following theorem, we prove that is a convex function of .
Theorem 1: We assume that is a continuous variable. Given the channel gains and , is a convex function w.r.t. .
Proof: We first prove that is a convex function w.r.t. , then the convexity of function can be proved in a similar method by replacing with . Thus, the summation of two convex functions is a convex function.
To simplify the notation, we denote . The first order and second order of w.r.t. are given by
[TABLE]
Since the first term in the brackets of (5) is positive, we only need to prove so that is a convex function.
To this end, we first simplify the function as
[TABLE]
where and are constants given by and , respectively.
The first and second derivative of w.r.t. are
[TABLE]
which show that is a strictly concave function of . Then is a convex function w.r.t. . By using the similar derivations, we show that is also a convex function w.r.t. . This completes the proof.
Based on Theorem 1, we apply the bisection search method to find the optimal blocklength allocation through solving the following equation:
[TABLE]
The details of searching for the optimal blocklength allocation are provided in Algorithm 1.
III-B Optimal Location Optimization with Fixed and
In this subsection, we aim for optimizing location with given and . However, the objective function is not a convex function w.r.t. . In the following, we numerically show that has only one local minimum point. Hence, there only exists only one solution that minimizes .
To provide clear explanations, we define a new function , which has the same monotonic property of . We first obtain the first and second derivative of w.r.t. as follows. We define and , where and are given by and , respectively.
The first derivative of w.r.t. is given by
[TABLE]
where is given by
[TABLE]
with given by
[TABLE]
and given by
[TABLE]
In (13), is
[TABLE]
The second derivative of w.r.t. can be calculated as
[TABLE]
where are given by
[TABLE]
with given by
[TABLE]
and given by
[TABLE]
In (16), is given by
[TABLE]
where .
Unfortunately, is not a convex function w.r.t. in the whole region of . Fig. 2 plots the functions , and versus . It is observed from this figure that when , , which means is a concave function. On the other hand, when , and is a convex function. Finally, when , becomes a concave function again. However, it is observed that when , and when . This means function first decreases with for and then increases with for , and there exists only one minimum value. It is difficult to rigorously prove this due to the cumbersome expression of . We check all the other simulation parameters, all numerical results show the same trend of function 444The rational behind this is that when x is small, the link from UAV to the robot will be the bottleneck of the whole link, and vice versa. . As a result, the bisection search can be used to find the root of , details of which can be found in the following algorithm.
III-C Overall Algorithm and Analysis
It is noted from simulations that the conventional block coordinate descent method, which directly iterates between blocklength and location, is very likely to get stuck at the initial point. To overcome this issue, we introduce a small perturbation for the blocklength in each iteration as shown in line 4 of Algorithm 3, where is a small integer.
The overall algorithm for solving Problem (3) is provided in Algorithm 3. The convergence of this algorithm is guaranteed since the objective value decreases in each step and the value is lower-bounded by zero. The complexity of this algorithm is analyzed as follows. In each iteration of Algorithm 3, we need to run both Algorithm 1 only once and Algorithm 2 for three times. The complexity of Algorithm 1 is given by , while that of Algorithm 2 is . Hence, the overall complexity of Algorithm 3 is given by . In simulations, the algorithm generally converges within ten iterations.
By using the similar analysis, the complexity of exhaustive search method is given by , which is significantly higher that of Algorithm 3.
Since the original problem in (3) is non-convex, Algorithm 3 cannot be guaranteed to yield a globally optimal solution. However, from the simulation results, we can find that this algorithm can achieve the same performance as the exhaustive search method.
IV Simulation Results
We now perform simulation results to show the performance of our proposed algorithm. The system parameters are set as follows: system bandwidth of , m, m, m, m, bits, , dB, Watt, Watt, , . The system transmission delay duration is set as . Thus, the total number of symbols is .
In Fig. 3, we plot the convergence behaviour of Algorithm 3 for various . It is shown in Fig. 3 that the algorithm converges rapidly and generally ten iterations are enough for convergence for all considered , which indicates that our algorithm has a low complexity.
In Fig. 4, we compared the proposed algorithm with the following algorithms: 1) exhaustive search algorithm (labeled as ‘Exhaus.’), 2) optimal blocklength allocation with fixed location (labeled as ‘Fixedx’), and 3) the optimal location with fixed blocklength (labeled as ‘Fixedm’). It is seen from Fig. 4 that the proposed algorithm achieves the same performance as that of the exhaustive search algorithm, and significantly outperforms the other two algorithms, which emphasizes the importance of joint optimization.
V Conclusions
This paper studied the joint location and blocklength allocation for UAV relay system with URLLC requirement. An effective low-complexity iterative algorithm was proposed to solve the optimization problem. Each subproblem can be solved by using the bisection search method. Simulation results confirm that the proposed algorithm achieved the same performance as that of the exhaustive search method, and has superior performance over the existing algorithms.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] Y. Zeng, R. Zhang, and T. J. Lim, “Wireless communications with unmanned aerial vehicles: opportunities and challenges,” IEEE Commun. Mag., , vol. 54, no. 5, pp. 36–42, May 2016.
- 2[2] ——, “Throughput maximization for UAV-enabled mobile relaying systems,” IEEE Trans. Commun. , vol. 64, no. 12, pp. 4983–4996, Dec 2016.
- 3[3] R. Fan, J. Cui, S. Jin et al. , “Optimal node placement and resource allocation for UAV relaying network,” IEEE Commun. Lett. , vol. 22, no. 4, pp. 808–811, April 2018.
- 4[4] S. Zhang, H. Zhang et al. , “Joint trajectory and power optimization for UAV relay networks,” IEEE Commun. Lett. , vol. 22, no. 1, pp. 161–164, Jan 2018.
- 5[5] Q. Wu, J. Xu, and R. Zhang, “Capacity characterization of UAV-enabled two-user broadcast channel,” IEEE J. Sel. Areas Commun. , vol. 36, no. 9, pp. 1955–1971, Sep. 2018.
- 6[6] M. Shafi, A. F. Molisch et al. , “5G: A tutorial overview of standards, trials, challenges, deployment, and practice,” IEEE J. Sel. Areas Commun. , vol. 35, no. 6, pp. 1201–1221, June 2017.
- 7[7] G. Durisi, T. Koch, and P. Popovski, “Toward massive, ultrareliable, and low-latency wireless communication with short packets,” Proc. IEEE , vol. 104, no. 9, pp. 1711–1726, Sept 2016.
- 8[8] Y. Polyanskiy, H. V. Poor, and S. Verdu, “Channel coding rate in the finite blocklength regime,” IEEE Trans. Inf. Theory , vol. 56, no. 5, pp. 2307–2359, May 2010.