Homotopy properties of smooth functions on the M\"obius band
Iryna Kuznietsova, Sergiy Maksymenko

TL;DR
This paper investigates the homotopy properties of smooth functions on the Möbius band, specifically computing the isotopy classes of diffeomorphisms preserving such functions under certain conditions.
Contribution
It provides explicit calculations of the group of isotopy classes of diffeomorphisms preserving Morse functions on the Möbius band, extending to non-orientable surfaces.
Findings
Computed the group of isotopy classes of diffeomorphisms preserving Morse functions on the Möbius band.
Extended results to certain classes of functions on non-orientable surfaces.
Established conditions under which the computations hold for functions with specific germ properties.
Abstract
Let be a M\"obius band and be a Morse map taking a constant value on , and be the group of diffeomorphisms of fixed on and preserving in the sense that . Under certain assumptions on we compute the group of isotopy classes of such diffeomorphisms. In fact, those computations hold for functions whose germs at critical points are smoothly equivalent to homogeneous polynomials without multiple factors. Together with previous results of the second author this allows to compute similar groups for certain classes of smooth functions on non-orientable surfaces .
Click any figure to enlarge with its caption.
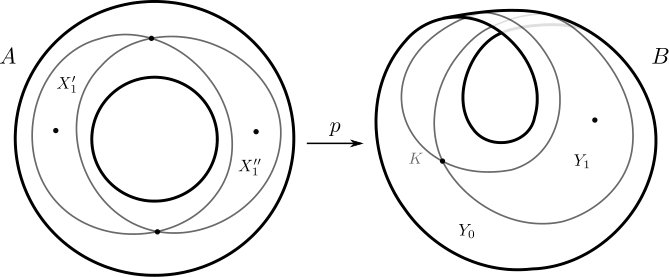 Figure 1
Figure 1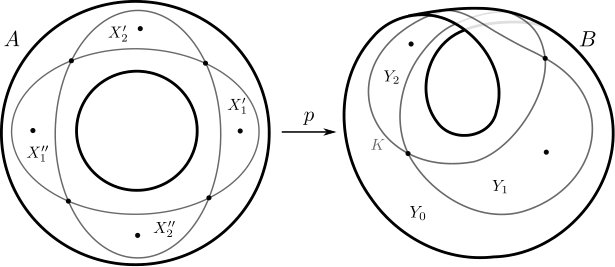 Figure 2
Figure 2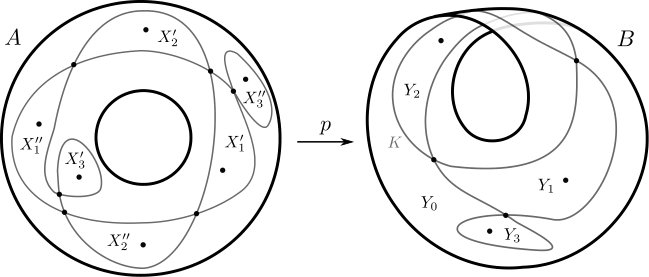 Figure 3
Figure 3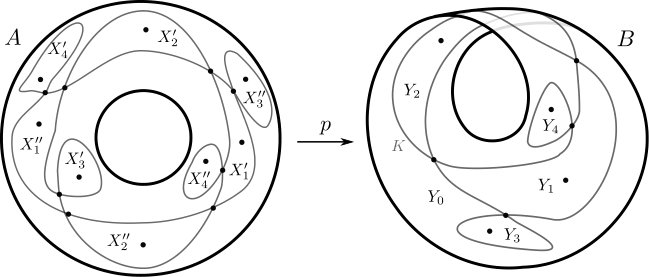 Figure 4
Figure 4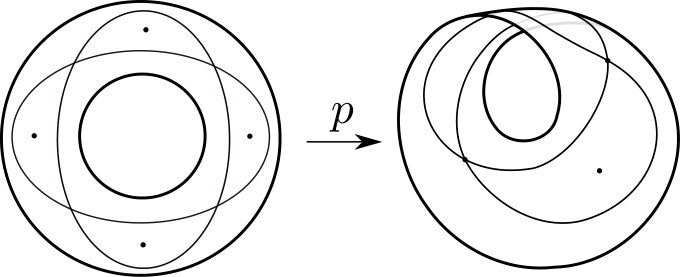 Figure 5
Figure 5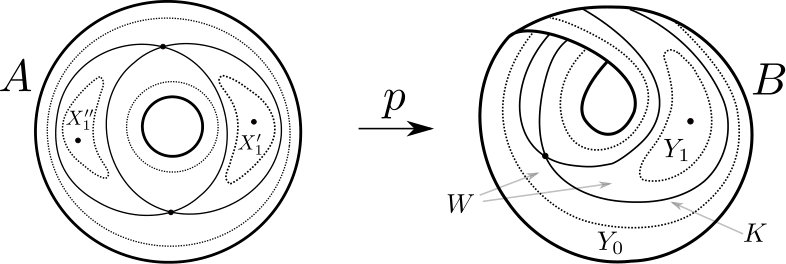 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Homotopy properties of smooth functions on the Möbius band
Iryna Kuznietsova, Sergiy Maksymenko
Department of Algebra and Topology, Institute of Mathematics of NAS of Ukraine, Tereshchenkivska str. 3, Kyiv, 01601, Ukraine
[email protected], [email protected]
Abstract.
Let be a Möbius band and be a Morse map taking a constant value on , and be the group of diffeomorphisms of fixed on and preserving in the sense that . Under certain assumptions on we compute the group of isotopy classes of such diffeomorphisms. In fact, those computations hold for functions whose germs at critical points are smoothly equivalent to homogeneous polynomials without multiple factors.
Together with previous results of the second author this allows to compute similar groups for certain classes of smooth functions on non-orientable surfaces .
Key words and phrases:
Diffeomorphism, Morse function
2000 Mathematics Subject Classification:
57S05, 57R45, 37C05
1. Main result
Let be a smooth compact surface, i.e. a 2-dimensional manifold, which can be disconnected, non-orientable, and have a non-empty boundary, and be either a real line or a circle . Then the group of -diffeomorphisms of acts from the right on the space of smooth maps defined by the following rule: the result of the action of a diffeomorphism on is the composition . Then for each one can define the stabilizer of
[TABLE]
and its orbit
[TABLE]
with respect to the above action.
More generally, denote by the group of diffeomorphisms of fixed on a closed subset . Let also
[TABLE]
We will endow and with Whitney -topologies and their subspaces and with induced ones. Then they yield certain topologies on the stabilizers and orbits of maps . Let also and be the identity path components of and , and be the path component of containing . If , then we will omit from notation.
In the present paper we continue study of the homotopy types of and , see below for references and the history of the problem. Our main results, Theorems 1.4 and 1.5, concern with the group for the case when is a Möbius band, , and belongs to the following space of maps .
Definition 1.1**.**
Let be the subset of consisting of maps having the following properties:
- (1)
the map takes constant values at each connected component of and has no critical points on it; 2. (2)
for every critical point of the germ of at is equivalent to some homogeneous polynomial without multiple factors.
A map will be called Morse, if it satisfies condition (1) and all its critical points are non-degenerate. Denote by the space of all Morse maps. A Morse map is generic, if it takes distinct values at distinct critical points.
Since the polynomial is homogeneous and has no multiple factors, it follows from Morse lemma that
[TABLE]
Also notice that every has only isolated critical points. A structure of level set foliations near critical points of is illustrated in Figure 1.1. A critical point of which is not a local extreme will be called a saddle.
Let , , and be a connected component of the level-set . Then will be called regular whenever it contains no critical points, and critical otherwise. A connected component of containing will be called an -regular neighborhood of if contains no critical points and does not intersect .
Let be a disjoint union of connected one- and two-dimensional submanifolds of . We will say that is an -adopted submanifold if for each the following conditions hold:
- (1)
if , then is a regular connected component of some level-set , ; 2. (2)
if , then the connected components of the boundary are regular connected components of some level-sets of .
In particular, an -regular neighborhood is an -adopted subsurface. Evidently, if is adopted subsurface, then the restriction belongs to the space .
Denote
[TABLE]
The following statement collects known information about the homotopy types of stabilizers and orbits of .
Theorem 1.2**.**
Let be a connected compact surface, , and be a union of finitely many connected components of some level-sets of and some critical points of . Then the following statements hold.
- (1)
The map defined by is a locally trivial principal -fibration. In particular, the restriction is a locally trivial principal -fibration, **[20]**, **[10]**. 2. (2)
The group is homotopy equivalent to the circle if and only if the following condition holds:
* is orientable, , is a collection of at most critical points of , and each critical point of is a non-degenerate local extreme.*
Otherwise, is contractible, and in this case
- (a)
if , , and is Morse having exactly two critical points (minimum and maximum), then is homotopy equivalent to ; 2. (b)
otherwise, if or , and , then for ; 3. (c)
otherwise, for , **[10]**, **[13]**. 3. (3)
Suppose is contractible.
[TABLE]
If , the group is contractible as well, and (1.1) yields an isomorphism
[TABLE]
see **[10]**, **[13]**. 4. (4)
* for any union of boundary components of , [14].* 5. (5)
If is Morse and has exactly critical points, then is homotopy equivalent to a certain covering space of the -th configuration space of , which in turn is homotopy equivalent to some (possibly non-compact) -dimensional CW-complex. In particular, is a subgroup of the -th braid group of , **[11]**. 6. (6)
Suppose is generic. If and has exactly two critical points being local extremes, then is homotopy equivalent to . Otherwise, if or , then is homotopy equivalent to for some . In all other cases is homotopy equivalent to for some , **[10]**. 7. (7)
Suppose is orientable, , and (which holds e.g. if or if is generic and has at least one saddle critical point). Then has the homotopy type of the quotient of by a free action of some finite group if , and the homotopy type of if , **[6]**, **[7]**, **[8]**, and also **[9]** for extensions to functions with prescribed local singularities of -types, .
Results in (7) are obtained by E. Kudryavtseva.
Notice that in the case (2)(c), e.g. when if is distinct from -sphere and projective plane, then is aspherical, and so its homotopy type is completely determined by the fundamental group .
If is generic, then by (6) is homotopy equivalent to some torus , whence is free abelian.
Suppose is orientable and differs from . Then by (7) we have a certain free action of a finite group on the torus . Hence the quotient map is a locally covering map, whence we have the following short exact sequence:
[TABLE]
which due to (7) can be rewritten as follows:
[TABLE]
This sequence was first discovered in [10, Eq. (1.6)]. In particular, it implies that is a crystallographic group, i.e. contains a free abelian normal subgroup of finite index. Moreover, due to (5) is also a subgroup of a certain braid group of . Since has no elements of finite order, so does , and therefore it is a Bieberbach group.
To describe further known results, for every -adopted connected subsurface let
[TABLE]
be the fundamental group of the orbit of the restriction of to . In particular, if either is non-empty or , then we get from Theorem 1.2 the following isomorphisms:
[TABLE]
The following statement summarizes several results about .
Theorem 1.3**.**
[12], [16], [17], [18], [4], [3].* Let be a compact surface. Then for each there exist mutually disjoint -adopted subsuraces having the following properties.*
- (1)
If , then each is either a -disk or an annulus or a Möbius band, and
[TABLE] 2. (2)
Suppose is a -torus.
- (a)
If the Kronrod-Reeb graph of (see §2 for definition) is a tree, then each is a -disk, and
[TABLE]
for some . 2. (b)
Otherwise, contains a unique cycle, , is an annulus, and
[TABLE]
for some .
Here and are wreath products of certain types, which are not essential for our considerations. Notice that in this theorem and can be replaced by either of the groups of type (1.2). On the other hand, is not the same as since and due to (1.1) we have the following short exact sequence:
Theorem 1.3 shows that for most surfaces computation of reduces to the cases of -disk, annulus and Möbius band. Structure of for being -disk and annulus is completely described in [15]. The remained open cases are -sphere and all non-orientable surfaces.
Our aim is to describe the structure of for the case when is a Möbius band and under certain restrictions on .
Theorem 1.4**.**
Let be a Möbius band and . There exists a unique critical component of some level-set of with the following property: if is an -regular neighborhood of and are all the connected components of enumerated so that , then is an annulus , and each , , is a -disk. In particular,
[TABLE]
for each .
Let be the family of all connected components of being -disks as in Theorem 1.4. Since is invariant with respect to , we have a natural action of on by permutations.
Let us fix an orientation of each , , and put . Then the action of on extends to an action on defined by the following rule: if and , then and , where
[TABLE]
Let be the normal subgroup of consisting of diffeomorphisms preserving each with its orientation. In other words, is the kernel of non-effectiveness of the action of on . Hence the action of the quotient on is effective. However the induced action of on is not in general effective.
Theorem 1.5**.**
The quotient group freely acts on , and we have an isomorphism
[TABLE]
In particular, if , then we have an isomorphism:
[TABLE]
The case when the group is non-trivial will be considered in another paper.
Due to (1) of Theorem 1.3 a knowledge of will allow to compute for all non-orientable surfaces with . Together with results of [15], describing algebraic structure of for being -disk and annulus, this will give a complete description of the groups for all compact surfaces except for -sphere, projective plane, and Klein bottle. Also during the proof of Theorem 1.5 we will get more detailed information about .
Examples
Let be an annulus, be the involution without fixed points and changing orientation of , so is a Möbius band, and is an orientable double covering of . Figure 1.2 contains examples of critical components level-sets of Morse functions described by Theorem 1.4 and their preimages in . In order to simplify the illustration we denote by the connected components of (not of as in Theorem 1.4), and by and connected components of for .
- Case (a).
There exists such that and it reverses orientation of . Then and it generated by the isotopy class of . Moreover, the action of on is transitive. 2. Case (b).
In this case is generated by the isotopy class of such that , and reverses orientations of both and . Now the action of on is transitive as well. 3. Case (c).
Evidently, each preserves each , , with its orientation. This means that , so the group is trivial. 4. Case (d).
Now is generated by the isotopy class of such that
[TABLE]
Structure of the paper
In §2 we recall the notion of the Kronrod-Reeb graph of a map , and in §3 prove of Theorem 1.4. §4 contains certain results about relations of diffeomorphism groups of a non-orientable manifold and its double covering. In §5 we recall the notion of a Hamiltonian like flow for a function on an orientable surface. In §6 we introduce several subgroups of and prove Theorem 6.2 allowing to ‘‘simplify’’ diffeomorphisms from the stabilizer of . These results extend [15, §3 & §7] to non-orientable case. §7 describes the relation between the groups and for functions on the annulus , see Lemma 7.1. In §8 we prove Theorem 1.5.
2. Kronrod-Reeb graph
Let be a compact surface. Given consider the partition of into connected components of level sets of . Let also be the set of elements of that partition and be the quotient map. Endow with the corresponding quotient topology, so a subset is open if and only if is open in .
Since takes constant values on connected components of and has only finitely many critical points, it follows that is a ‘‘topological graph’’, i.e. a one-dimensional CW-complex. It is also called the Kronrod-Reeb graph or simply the graph of .
The following statement is well known for Morse maps, and can easily be extended to maps with isolated critical points and taking constant values at each connected component of .
Lemma 2.1**.**
cf. [2, Corollary 3.8].* Let . Then the quotient mapping induces an epimorphism between the corresponding integer homology groups.*
Proof.
One easily shows that there exists a continuous map such that is homotopic to , so is a ‘‘homotopical section’’ of the map . Hence we get the following commutative diagram
[TABLE]
implying surjectivity of . ∎
Corollary 2.2**.**
Let be either a -sphere or a projective plane with holes. Then for each the homomorphism is zero, whence the Kronrod-Reeb graph of is a tree.
Proof.
Notice that for such surfaces the homomorphism induced by the inclusion is surjective. Since takes constant values at boundary components of , it follows that , whence is zero epimorphism. Therefore and so is a tree. ∎
3. Proof of Theorem 1.5
Let be a Möbius band, , and be the Kronrod-Reeb graph of being due to Corollary 2.2 a tree. We have to find a connected component of some level set of satisfying statement of Theorem 1.5.
Recall that up to an isotopy and changing of orientation there are exactly two classes of two-sided simple closed curves on Möbius strip:
a curve isotopic to and dividing into an annulus and a Möbius strip; 2.
a null-homotopic curve dividing into a -disk and a Möbius strip with a hole.
In particular, each regular component of each level-set of is a two-sided simple closed curve in , and so it has one of the above types or . Notice that is an internal point of some open edge of . If is another regular component of some level set such that , then is isotopic to , and therefore it has the same type or as . Hence one can associate to each edge of the type or being the type of , where is any point in .
Therefore Theorem 1.5 can be reformulated as follows: there exists a unique vertex having exactly one incident -edge. Then .
For the proof we need the following lemma. Denote by the vertex of corresponding to the boundary of .
Lemma 3.1**.**
- (i)
A vertex can not have more than two incident -edges. 2. (ii)
*Let be an open -edge, be a point, and be a connected component of that does not contain . Then every edge in is of type *as well.
Proof.
(i) Let be the critical component of some level set of corresponding to , be all the -edges incident to , , be a connected component of a level-set of corresponding to some point of , , and be all the connected components of . One can assume that , whence as well.
Now by assumption any two curves and are disjoint, not null homotopic, and isotopic each other. Hence they bound an annulus in with .
Assume now that , so we have at least three annulus , and . Then their union is connected.
If the interiors of those annulus were mutually disjoint, then
[TABLE]
whence
[TABLE]
would be connected which contradicts to the property that is disconnected.
Hence, renumbering indexes if necessary, one can assume that , and so . But as well, whence
[TABLE]
and therefore is contained either in or in . Assume for definiteness that . Then which contradict to the assumption that . Hence .
(ii) Notice that is an open disk. Hence if is an open edge and is a point, then the curve bounds in a disk, and so is of type . ∎
Now we can finish Theorem 1.5.
First we show that such a vertex exists. Let , and be a unique edge of incident to , where is another vertex of . Evidently, is of type . If there is no other -edges incident to except for , then is the required vertex.
Otherwise, due to (i) of Lemma 3.1 exists a unique -edge incident to and distinct from . Applying the same arguments to and so on we will stop (due to the finiteness of ) at a unique path
[TABLE]
of mutually distinct -edges such that its end vertex has a unique -edge.
Let us prove a uniqueness . Let be a vertex of distinct from and be the number of -edges incident to . We should prove that or . If , then by the construction .
We claim that for all other vertices. Indeed, let be the connected component of the complement containing . Then is a subtree having with the path a unique common vertex, say . Let be a unique edge belonging to . Then by the construction is of type , whence by (ii) of Lemma 3.1 all other edges of are also of type . In particular, so are all edges incident to , whence . ∎
4. Diffeomorphisms of non-orientable manifolds
Let be a smooth non-orientable connected manifold of dimension {\color[rgb]{1,0.04,0.61}m}, be the oriented double covering of , and be the corresponding diffeomorphism without fixed points generating the group of covering transformations, that is and .
A diffeomorphism will be called symmetric if it commutes with , that is . Denote by the group of all symmetric diffeomorphisms of fixed on a closed subset and by the identity path component of . If is empty, we will just omit it from notation.
The aim of this section is to find precise relations between the groups and , see Lemma 4.2 below.
Lemma 4.1**.**
Let be a path connected subset. Then its preimage is either path connected or consists of two disjoint path components which are interchanged by .
Proof.
One easily deduces from path lifting axiom for the covering map , that for every path component of . Hence for every point its inverse image intersects each path component of . But consists of two points, say and , whence must consist of either one or two path components. Moreover, if has two path components and such that and , then interchanges and as well as path components and . ∎
Lemma 4.2**.**
Each yields a diffeomorphism such that , and the correspondence is a continuous epimorphism with kernel . Moreover, yields an isomorphism of onto , so we get the following commutative diagram whose rows are exact and all vertical arrows are isomorphisms:
[TABLE]
where is the inverse to .
Moreover, also induces the isomorphisms described below.
- (1)
For every subset we have an isomorphism
[TABLE] 2. (2)
Suppose is a subset such that for every path component of and the restrictions
[TABLE]
are distinct maps, that is they take distinct values at some point. Then we also have an isomorphism
[TABLE]
For instance, this hold if is an {\color[rgb]{1,0.04,0.61}m}-dimensional submanifold or a two-sided ({\color[rgb]{1,0.04,0.61}m}-1)-dimensional submanifold, but does not hold when is a finite subset.
Proof.
Let and . Then consists of two diffeomorphisms and one of which preserves orientation, and another one reverses it. Denote by those one which preserves orientation. Then the correspondence is a continuous homomorphism satisfying . Since by definition commutes with all and generates the kernel of , we get the desired diagram (4.1).
(1) First notice that is also the identity path component of . Hence induces an isomorphism of onto the path component of , and so we get the inverse isomorphism coinciding with (4.2) for the case .
Suppose now that is a non-empty subset and let . Evidently, \rho\bigl{(}\widetilde{\mathcal{D}}(M,X)\bigr{)}\subset\mathcal{D}(N,Y), that is if is fixed on , then is fixed on . Hence
[TABLE]
Conversely, let , so there is an isotopy such that , , and each is fixed on . Since is a covering map, lifts to a unique isotopy such that and . In particular, , and so .
It remains to show that each is fixed on , which will imply that
[TABLE]
and give the isomorphism (1). Let and . Since , it follows that . But the latter set is discrete and , whence as well. Thus is fixed on .
(2) Let , so the restriction is a double covering map. As noted above \rho\bigl{(}\widetilde{\mathcal{D}}(M,X)\bigr{)}\subset\mathcal{D}(N,Y), and so we should only check that
[TABLE]
a) Suppose is path connected and let and . To prove (4.4) we should check that is fixed on .
Since is fixed on , it follows that for all . By assumption , so there exists a point such that , and so . Let be the path component of containing . Then and the restriction is a unique lifting of the identity map for the covering map having the property that . Hence is the identity, i.e. is fixed on .
Furthermore, suppose there exists another path component of . Then by Lemma 4.1 and . Since , it follows that and therefore . Hence has a fixed point in , and so it is fixed on as well. In other words , which proves (4.4) for the case when is path connected.
b) Now suppose is not path connected, and let the collection of all path components of , so . Then by a)
[TABLE]
Hence
[TABLE]
Lemma is proved. ∎
Lemma 4.3**.**
Let be a , ,
[TABLE]
The following statements hold true.
- (a)
* and ;* 2. (b)
Suppose , , and let be an -adopted submanifold. Then induces an isomorphism
[TABLE]
Proof.
Let and , so
[TABLE]
We have to show that if and only if , i.e. we need to deduce from (4.6) an equivalence of the following relations:
[TABLE]
Let and . If , then
[TABLE]
Conversely, if , then
[TABLE]
(b) Denote . Since is an -adopted submanifold, one easily checks that . Hence by (a) and Lemma 4.2 injectively maps into .
Conversely, it follows from (a) that . Therefore we get from statement (2) of Lemma 4.2 that
[TABLE]
Since , it follows that isomorphically maps onto . ∎
5. Hamiltonian like flows for .
Let be an orientable compact surface.
Definition 5.1**.**
Let and be the set of critical points of . A smooth vector field on will be called Hamiltonian like for if the following conditions hold true.
- (a)
* if and only if is a critical point of .* 2. (b)
* everywhere on , that is is constant along orbits of .* 3. (c)
Let be a critical point of . Then there exists a local representation of at as a homogeneous polynomial without multiple factors (as in Definition 1.1) such that in the same coordinates near the origin [math] in we have that .
It follows from (a) and Definition 1.1 that every orbit of is of one of the following types:
- •
a critical point of ;
- •
a regular component of some level set of , and so it is a closed orbit of ;
- •
a connected component of the sets , where runs over all critical components of level-sets of .
By [10, Lemma 5.1] or [13, Lemma 16] for every there exists a Hamiltonian like vector field. For the proof take the Hamiltonian vector field for with respect to any symplectic form on , and then properly change near each critical point of in accordance with (c) of Definition 5.1.
Let be a Hamiltonian like vector field for . Since takes constant values on boundary components of , it follows that is tangent to and therefore it generates a flow which will also be called Hamiltonian like for .
For each smooth function let be the map defined by
[TABLE]
We will call the shift along orbits of via the function , and will in turn be called a shift function for .
Evidently, condition (b) of Definition 5.1 is equivalent to the assumption that
[TABLE]
for all , that is .
More generally, since leaves invariant each orbit of , we see that for every function . In particular, is a diffeomorphism if and only if . Moreover, in this case and is an isotopy between and .
Denote by the Lie derivative of with respect to and let
[TABLE]
Theorem 5.2**.**
[10, Theorem 1.3], [13, Theorem 3].* Let , be the flow generated by some Hamiltonian vector field , and be the map defined by . If has at least one saddle or a degenerate local extreme, then is a homeomorphism with respect to topologies and is contractible (because is convex).*
Otherwise, there exists such that can be represented as a composition
[TABLE]
of the quotient map by the closed discrete subgroup of and a homeomorphism of the quotient of by onto . In particular, is an infinite cyclic covering map and is homotopy equivalent to the circle.
6. Groups
For let be the normal subgroup of consisting of diffeomorphisms of having the following two properties:
leaves invariant every connected component of each level-set of ; 2. 2)
if is a degenerate local extreme of , so, in particular, , then the tangent map is the identity.
For a closed subset of define the following three groups:
[TABLE]
Define also their intersections with and as follows:
[TABLE]
where we follow the notation convention that is omitted if it is empty. In particular, . The following lemma can be proved similarly to [15, Lemma 3.4] and we leave its proof for the reader.
Lemma 6.1**.**
cf. [15, Lemma 3.4].* All the groups in (6.1) are normal subgroups of .*
The groups , , are unions of path components of . In particular, is the identity path component of each of these groups.
Similarly, the groups , , and are also unions of path components of . ∎
It follows that can be regarded as a normal subgroup of . Moreover, if has no degenerate local extremes, then the corresponding quotient
[TABLE]
can be interpreted as the group of automorphisms of the Kronrod-Reeb graph of induced by diffeomorphisms from , see e.g. [5], [19], [1], [13]. If has degenerate local extremes, then there is a similar interpretation of but one should modify Kronrod-Reeb graph of by gluing additional edges to each vertex corresponding to each degenerate local extreme, see for details [13]. Similarly, one can define
[TABLE]
Our aim is to prove the following statement extending [15, Corollary 7.2] to non-orientable case and deduce from it several useful results.
Theorem 6.2**.**
cf. [10, Corollary 6.1], [15, Corollary 7.2].* Let be a compact surface, , be a compact -adopted submanifold, and be an -regular neighborhood of . Then the following inclusions are homotopy equivalences:*
[TABLE]
Proof.
The case when is orientable is proved in [15]. So our aim is to extend it to the case when is non-orientable. In fact the proof is an adaptation of [15, Lemma 7.1] similar to [10, Lemma 4.14] and therefore we only indicate the principal arguments.
Also notice that similarly to [15, Corollary 7.2] it suffices to prove that the inclusions (6.2) are homotopy equivalences, so they induce bijections between the path components of the corresponding groups, and the inclusions of the corresponding path components are homotopy equivalences.
Indeed, notice that the groups in (6.3) are intersections of the corresponding groups from (6.2) with the path component of the larger group . If a path component of any group in (6.3) intersects , then is contained in . Hence the inclusions (6.3) yield bijections between the path components of the corresponding groups, and due to (6.2) the inclusions of path components are homotopy equivalences.
The deduction that (6.4) and (6.5) are homotopy equivalences is similar.
Thus assume that is a non-orientable connected compact surface. Consider its oriented double covering , and let be the corresponding diffeomorphism without fixed points generating the group of covering transformations, that is and .
Denote , , and . Then , is a compact -adopted submanifold of , and is a -regular neighborhood of .
Fix a Hamiltonian like vector field for on and let be the flow generated by .
Let be the vector field on induced by from . Then one can always assume, see [10, Lemma 5.1 (2)], that is also skew-symmetric with respect to in the sense that , whence
[TABLE]
for all . Indeed, it is necessary to replace with and properly change it near critical points of in order to preserve property (c) of Definition 5.1.
Lemma 6.2.1**.**
cf. [10, Lemma 4.14], [15, Lemma 7.1].* Let be a subset and be a continuous map such that*
[TABLE]
for all and . Then for any pair of -regular neighborhoods of such that , there exists a continuous map , see (5.2), satisfying the following conditions.
- (1)
For each the function extends to all , satisfies relation (6.7) on , and vanishes on , that is
- •
* on ,*
- •
* for all ,*
- •
* on .* 2. (2)
If and is fixed on some -regular neighborhood , then on as well. 3. (3)
The homotopy defined by
[TABLE]
has the following properties:
- (a)
* and , so it deforms in into ;* 2. (b)
if and is fixed on some -regular neighborhood , then is fixed on for all as well.
Suppose in addition that is skew-symmetric, that is , and either of the following conditions hold:
- (i)
every connected component of contains a critical point of being not a non-degenerate local extreme; 2. (ii)
* for all .*
Then one can assume that
- (4)
* for each ;* 2. (5)
H\bigl{(}(\mathcal{A}\cap\widetilde{\mathcal{S}}(g))\times I\bigr{)}\subset\widetilde{\mathcal{S}}(g), that is the set of -symmetric diffeomorphisms remains invariant with respect to the homotopy .
Proof.
Statements (1)-(3) constitute [15, Lemma 7.1]. So we should verify statements (4) and (5) concerning skew-symmetric diffeomorphisms.
Let us briefly recall the idea of proof. Since is a -regular neighborhood of , for each the function uniquely extends to a function such that (6.7) holds on , that is for all . Moreover, the correspondence is a continuous map .
Fix a function with the following properties:
- •
on some neighborhood of ;
- •
on some neighborhood of ;
- •
, that is take constant values along orbits of .
Then the required map can be defined by
[TABLE]
Suppose now that is skew-symmetric with respect to . We will show below that in this case
[TABLE]
for all .
Assuming that (6.9) holds let us complete the proof of Lemma 6.2.1. Since and are invariant with respect to , and maps orbits of onto orbits, one can replace the function with not violating the above conditions on and thus additionally assume that
[TABLE]
Now if we define by the same formula (6.8) then conditions (4) and (5) will hold true.
(4) If and , then
[TABLE]
On the other hand, if , then as well, and so
[TABLE]
(5) Notice that for each and we have that
[TABLE]
This means that the map belongs to , whence as well.
Thus it remains to prove (6.9). Let , so
[TABLE]
for all . Then
[TABLE]
Hence
[TABLE]
for all . In other words, and are shift functions for on .
(i) Suppose that each connected component of contains either a degenerate local extreme or a saddle critical point of . Then the shift map on is injective, that is any two shift functions for on must coincide. Hence and coincide on all of .
(ii) If on all of , then on as well since . Moreover, as is a -regular neighborhood of , intersects interiors of all connected components of . It then follows from [15, Lemma 6.1(ii)] that and coincide on all of . Lemma 6.2.1 is completed. ∎
Now we can prove that the inclusions (6.2) are homotopy equivalences. Due to the statement (b) of Lemma 4.3 we can identify groups in (6.2) with their ‘‘symmetric’’ variants, and so it suffices to show that the following inclusions are homotopy equivalences:
[TABLE]
Let be any -regular neighborhood of , , and be a constant map into the zero function. Then for each and we have that
[TABLE]
Hence by (5) of Lemma 6.2.1 there exists a homotopy such that
- •
and ;
- •
if is fixed on some -regular neighborhood of contained in , then so is for all ;
In other words, is a deformation of into which leaves invariant , and . Hence the inclusions (6.11) and therefore (6.2) are homotopy equivalences. ∎
Simplification of diffeomorphisms preserving a function by isotopy
Let be a non-orientable compact connected surface, be the orientable double covering, and be an involution without fixed points generating the group of covering transformations. Let also and . Since is orientable, one can construct a skew-symmetric Hamiltonian like flow on for .
Let be a connected -adopted subsurface and be an -adopted submanifold. Denote and .
Let also the subset of consisting of diffeomorphisms admitting a function with the following properties:
- (1)
for all ; 2. (2)
on .
Denote
[TABLE]
Evidently, we have the following inclusion:
[TABLE]
since for each one can set on .
Using isomorphism from (4.5) put
[TABLE]
Then we obviously have the following inclusions:
[TABLE]
Corollary 6.3**.**
cf. [15, Corollary 7.3].* Let be a compact surface (orientable or not), , be an -adapted submanifold, and be a connected -adapted subsurface containing at least one saddle critical point of . Then the inclusions (6.13) are homotopy equivalences.*
Proof.
Since consists of path components of , it suffices to show only that the second inclusion is a homotopy equivalence.
For orientable this statement coincides with [15, Corollary 7.3]. Let us briefly recall the main steps of its proof. Since is connected and contains saddle critical points of , one can show that for every the function is unique and the correspondence is a continuous map . Then a deformation of into can be deduced from [15, Lemma 7.1] which is the same as Lemma 6.2.1.
Suppose is non-orientable. Let be the orientable double covering, and be an involution without fixed points generating the group of covering transformations, , and be a skew-symmetric Hamiltonian like vector field for on . Denote and . Then, by the orientable case, the inclusion is a homotopy equivalence. Moreover, by (i) and (ii) of Lemma 6.2.1 the deformation of to preserves -symmetric diffeomorphisms, which implies that the inclusion is a homotopy equivalence as well.
Finally, we have isomorphisms of topological groups (4.5):
[TABLE]
whence the inclusion is a homotopy equivalence as well. ∎
7. Functions on annulus
Lemma 7.1**.**
Let and . Then we have the following commutative diagram
[TABLE]
in which is induced by the inclusion , the rows are exact, and vertical arrows are isomorphisms.
Proof.
Let be an -regular neighborhood of . Then one can construct a Dehn twist along supported in and preserving , that is , see e.g. [10, §6].
It is well known that the mapping class group is freely generated by the isotopy class of , so we have the following sequence of homomorphisms
[TABLE]
where the first arrow is a natural homomorphism into the mapping class group of rel. associating to each its isotopy class, and the last arrow is an isomorphism. One can also assume that . Hence the restriction of to :
[TABLE]
is surjective. Moreover,
[TABLE]
Hence we have the following short exact sequence:
[TABLE]
and admits a right inverse defined by , i.e. .
Due to (6.2) there is an isomorphism induced by the natural inclusion:
[TABLE]
whence (7.2) reduces to the following exact sequence:
[TABLE]
in which admits a right inverse given by , .
Since is supported in , it follows that commutes with each . Therefore the subgroups and mutually commute and generate all the group . Hence an isomorphism (7.1) can be defined by
[TABLE]
for .
Regarding as a subgroup of , one easily checks that maps onto , whence left and right vertical arrows in (7.1) are isomorphisms. ∎
8. Proof of Theorem 1.5
By Theorem 1.4 there exists a unique a critical component of some level-set of such that if is an -regular neighborhood of , and are all the connected components of enumerated so that , then is an annulus , each , , is a -disk, see Figure 8.1.
There is also a natural action of on .
Proof that freely acts on .
Let us glue with a -disk and denote the obtained surface (being therefore a projective plane) with . Let also , , be the connected component of containing . Then we have a CW-partition of whose [math]-cells are critical points of belonging to , -cells are connected components of the complement , and -cells are .
Notice that each extends to a unique homeomorphism of fixed on . Moreover, since , it also follows that is -cellular, i.e. it induces a permutation of cells of .
Suppose for some cell of . If either
- •
or
- •
and preserves its orientation
then we will say that is -invariant. In particular, has a -invariant cell .
Since is also isotopic to , its Lefschetz number . Then it follows from [12, Corollary 5.6] that
- •
either the number of -invariant cells of is , or
- •
all cells of are -invariant.
Suppose for some . Then is -invariant, and so has at least -invariant cells. Hence all cells of are -invariant, which implies that for all other . This means that the action of on is free.
To construct isomorphism (1.3) we need the following two lemmas.
Lemma 8.1**.**
.
Proof.
Let . Then Corollary 6.3 implies that is isotopic in to a diffeomorphism . Hence and act on in the same way. But is fixed on , and so on for all . Whence leaves invariant each and preserves its orientation, that is . Therefore so does , and thus as well, i.e. .
Conversely, let , be the oriented double covering of , and be a unique lifting of fixed on . Then for each the preimage consists of two connected components and , see Figure 8.1. The assumption that and preserves orientation of means that leaves invariant both and and preserves their orientations. Hence by [15, Lemma 7.4], has a unique shift function . In other words, , whence by definition . ∎
Lemma 8.2**.**
There exists a commutative diagram
[TABLE]
where are induced by natural inclusions and the vertical arrows are isomorphisms. In particular, we get an isomorphism (1.3):
[TABLE]
Proof.
As is a monomorphism, it suffices to construct an isomorphism inducing left arrow. Due to Theorem 6.2 and Corollary 6.3 the following inclusions are homotopy equivalences:
[TABLE]
whence we need to compute the group instead. Further notice that there is a natural isomorphism
[TABLE]
for inducing isomorphism of the corresponding -groups:
[TABLE]
Since is an annulus, we get from Lemma 7.1 that
[TABLE]
Moreover, for all others -disks , , and so
[TABLE]
This gives the required isomorphism .
It remains to note that maps (regarded a subgroup of ) onto . We leave the details to the reader. ∎
Theorem 1.5 is completed.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] A. V. Bolsinov and A. T. Fomenko. Integrable Hamiltonian systems . Chapman & Hall/CRC, Boca Raton, FL, 2004. Geometry, topology, classification, Translated from the 1999 Russian original.
- 2[2] Ketty A. de Rezende, Guido G. E. Ledesma, Oziride Manzoli-Neto, and Gioia M. Vago. Lyapunov graphs for circle valued functions. Topology Appl. , 245:62–91, 2018.
- 3[3] B. Feshchenko. Actions of finite groups and smooth functions on surfaces. Methods Funct. Anal. Topology , 22(3):210–219, 2016.
- 4[4] B. G. Feshchenko. Deformation of smooth functions on 2 2 2 -torus whose Kronrod-Reeb graphs is a tree. In Topology of maps of low-dimensional manifolds , volume 12 of Pr. Inst. Mat. Nats. Akad. Nauk Ukr. Mat. Zastos. , pages 204–219. Natsīonal. Akad. Nauk Ukraïni, Īnst. Mat., Kiev, 2015.
- 5[5] A. S. Kronrod. On functions of two variables. Uspehi Matem. Nauk (N.S.) , 5(1(35)):24–134, 1950.
- 6[6] E. A. Kudryavtseva. Special framed Morse functions on surfaces. Vestnik Moskov. Univ. Ser. I Mat. Mekh. , (4):14–20, 2012.
- 7[7] E. A. Kudryavtseva. The topology of spaces of Morse functions on surfaces. Math. Notes , 92(1-2):219–236, 2012. Translation of Mat. Zametki 9 2 (2012), no. 2, 241–261.
- 8[8] E. A. Kudryavtseva. On the homotopy type of spaces of Morse functions on surfaces. Sb. Math. , 204(1):75–113, 2013.