Successive Convexification for 6-DoF Powered Descent Guidance with Compound State-Triggered Constraints
Michael Szmuk, Taylor P. Reynolds, Behcet Acikmese, Mehran Mesbahi,, John M. Carson III

TL;DR
This paper presents a novel continuous formulation for compound state-triggered constraints, enabling advanced constraint logic in 6-DoF powered descent guidance problems solved via successive convexification.
Contribution
It introduces a new continuous formulation for compound state-triggered constraints, allowing complex logical conditions in optimal control without combinatorial complexity.
Findings
Successfully applied to 6-DoF descent guidance simulations.
Demonstrated velocity-triggered angle of attack constraint effectiveness.
Showed collision avoidance with complex trigger conditions.
Abstract
This paper introduces a continuous formulation for compound state-triggered constraints, which are generalizations of the recently introduced state-triggered constraints. State-triggered constraints are different from ordinary constraints found in optimal control in that they use a state-dependent trigger condition to enable or disable a constraint condition, and can be expressed as continuous functions that are readily handled by successive convexification. Compound state-triggered constraints go a step further, giving designers the ability to compose trigger and constraint conditions using Boolean and and or operations. Simulations of the 6-degree-of-freedom (DoF) powered descent guidance problem obtained using successive convexification are presented to illustrate the utility of state-triggered and compound state-triggered constraints. The examples employ a velocity-triggered angle…
Click any figure to enlarge with its caption.
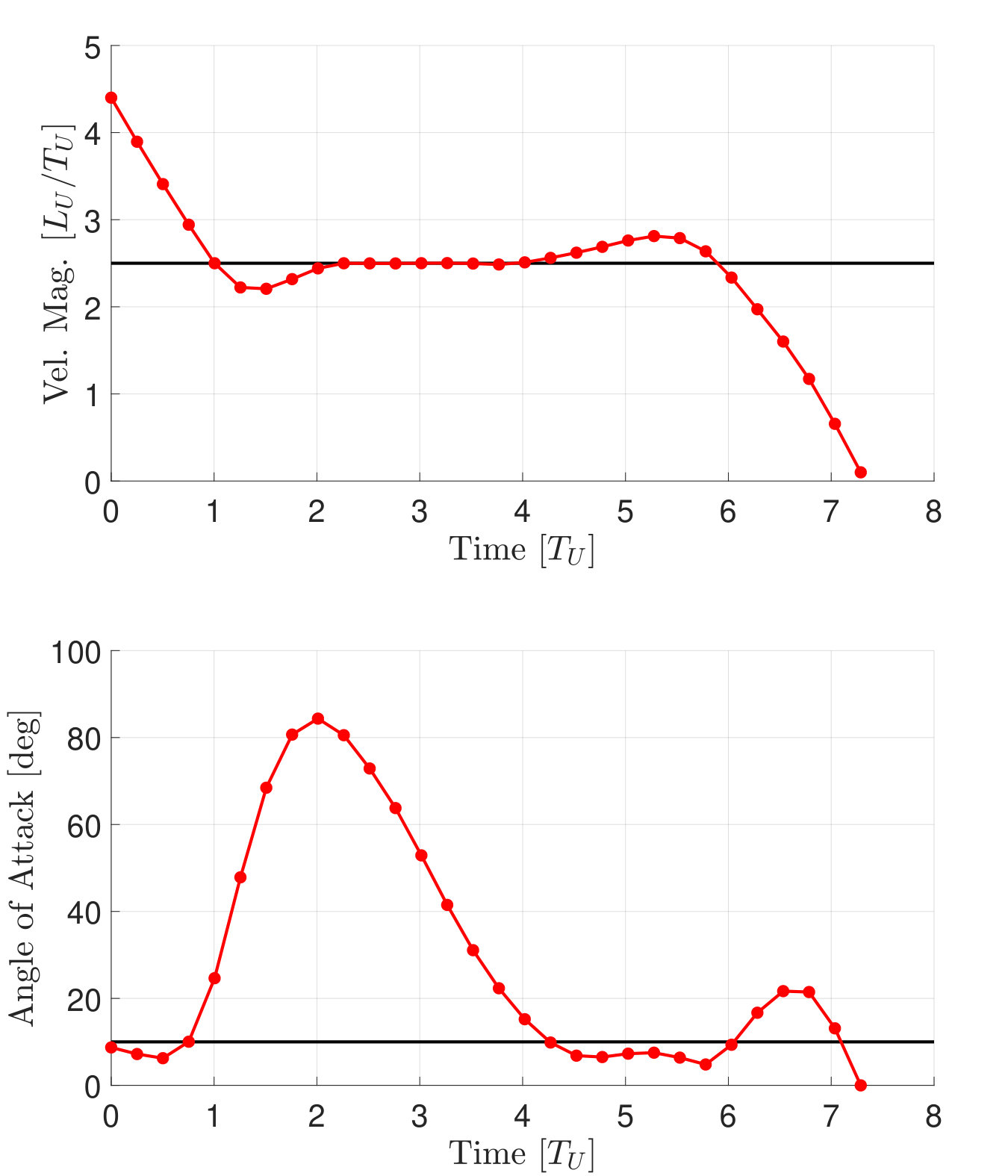 Figure 1
Figure 1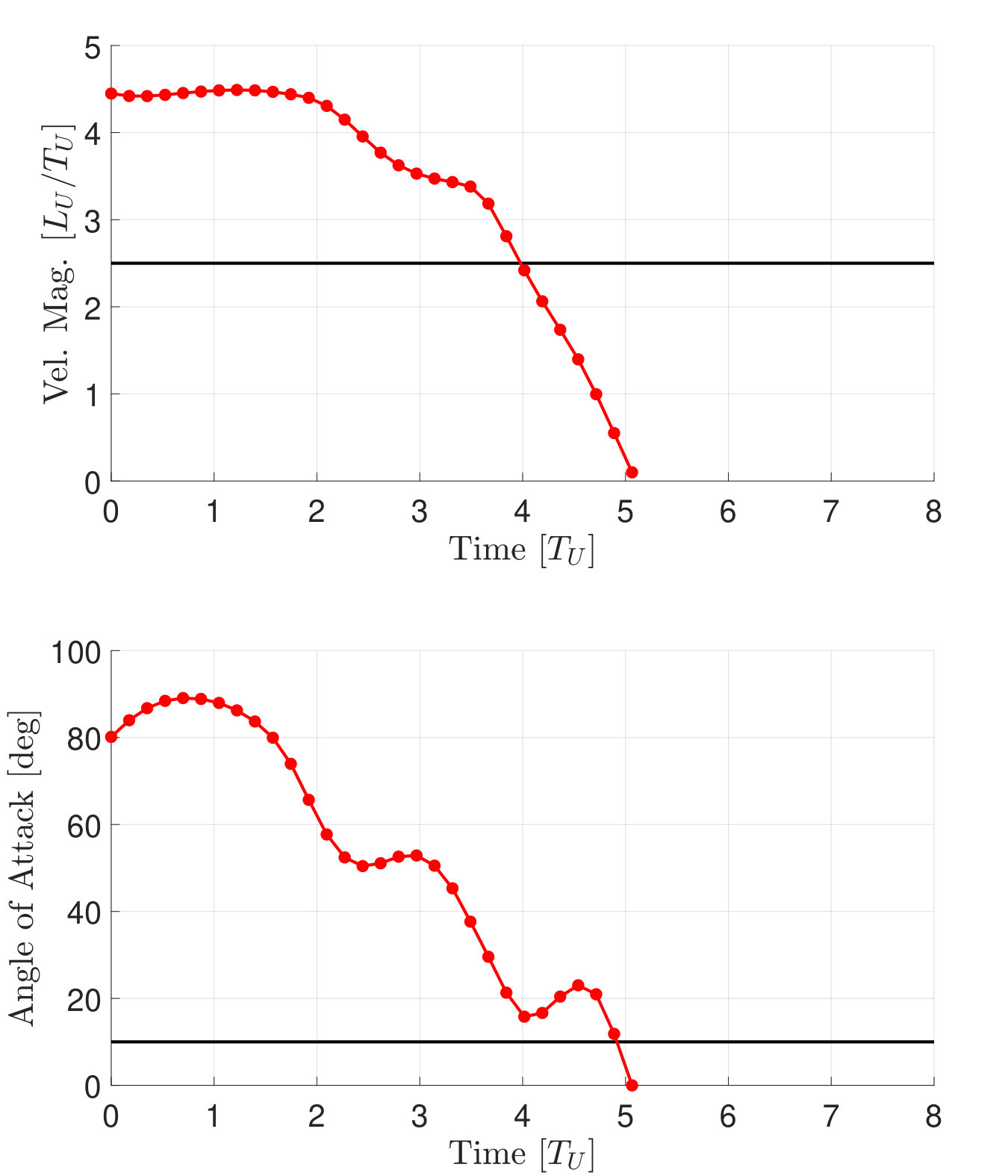 Figure 2
Figure 2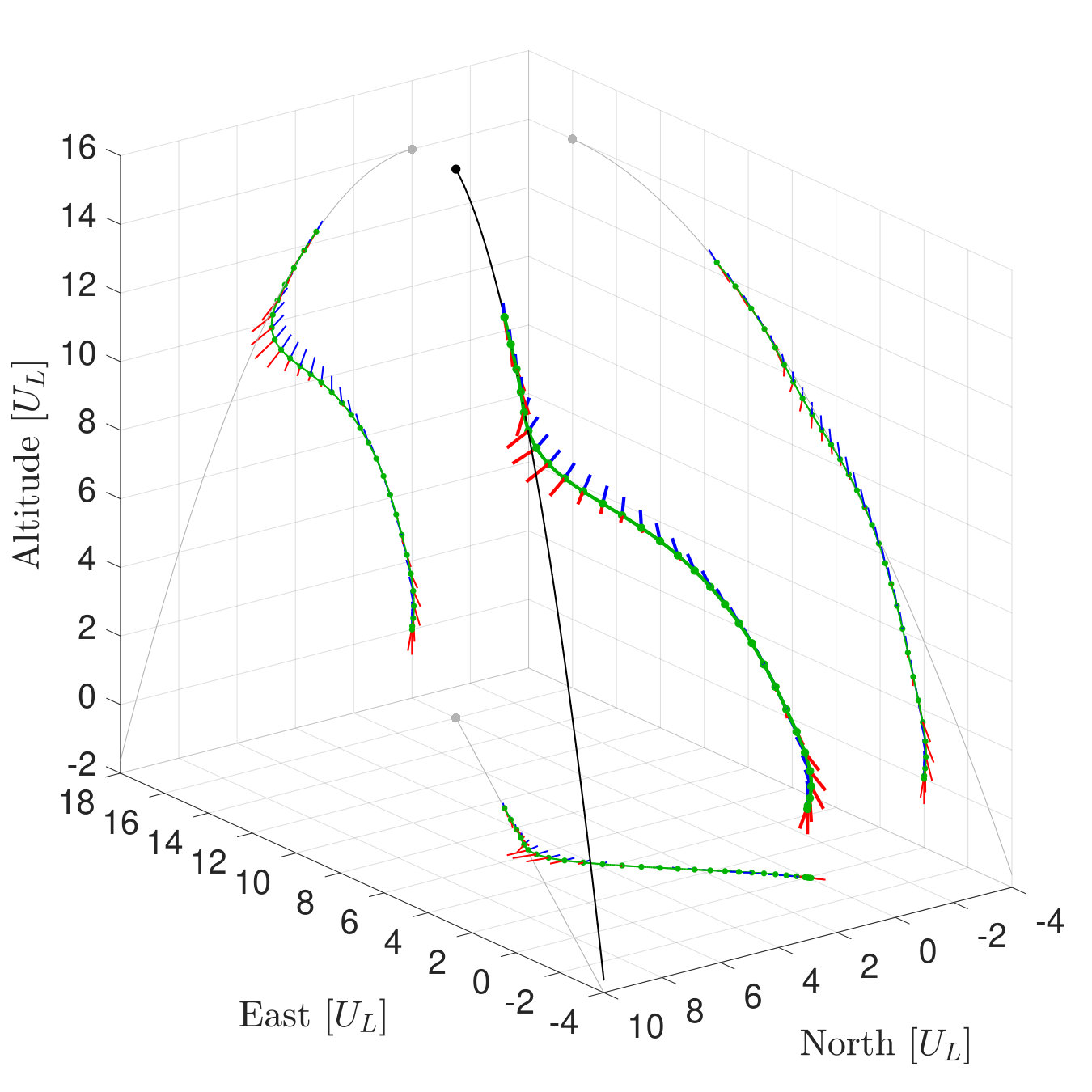 Figure 3
Figure 3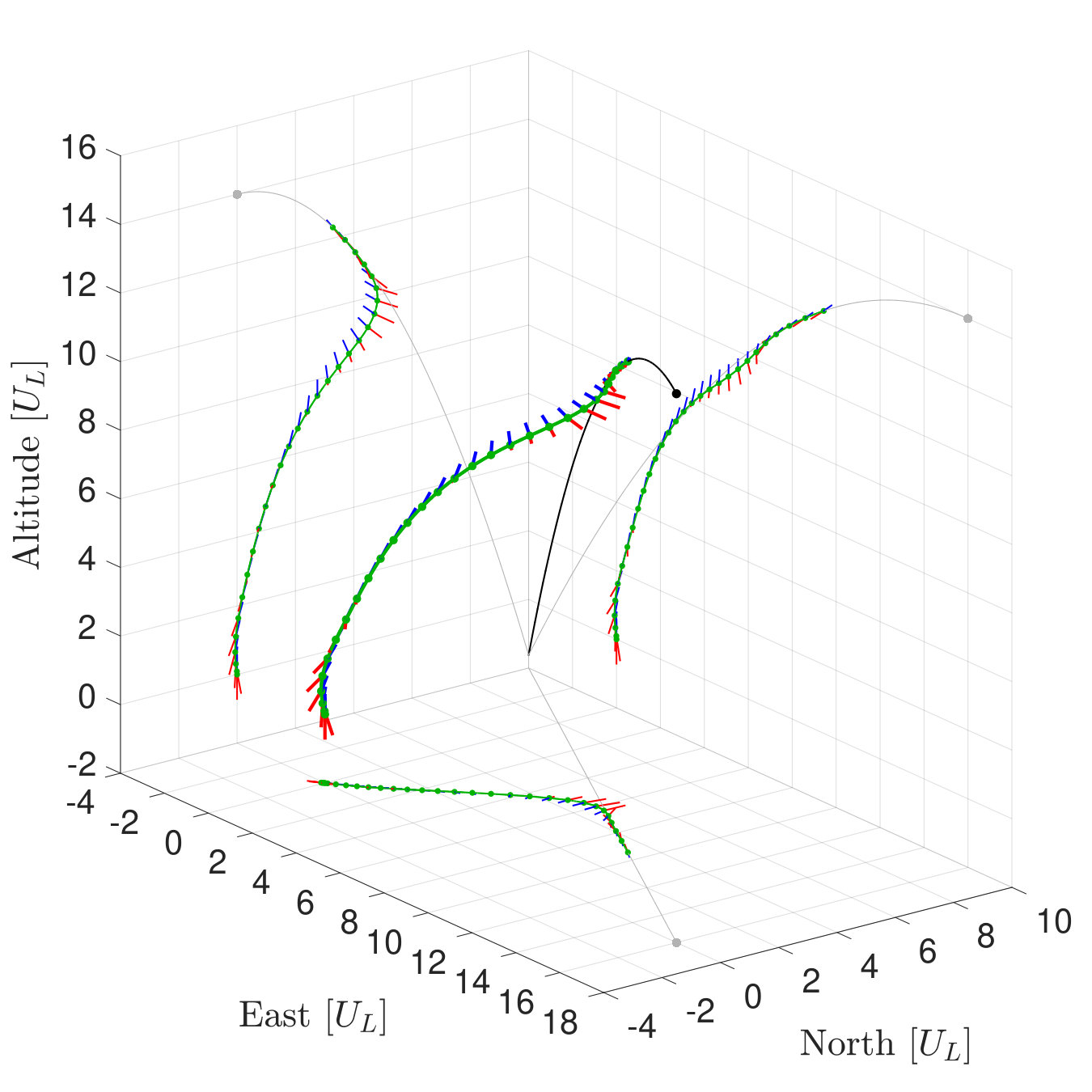 Figure 4
Figure 4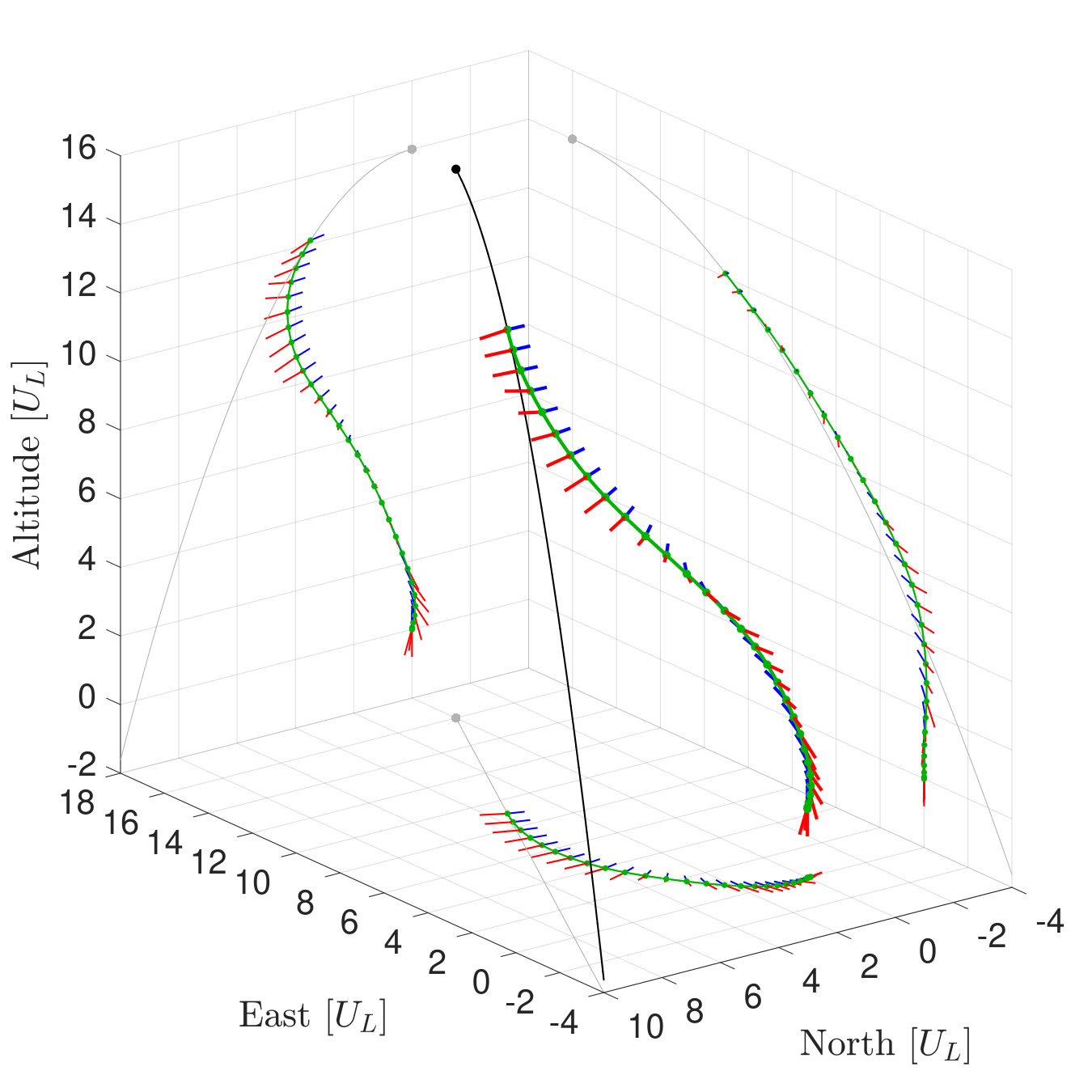 Figure 5
Figure 5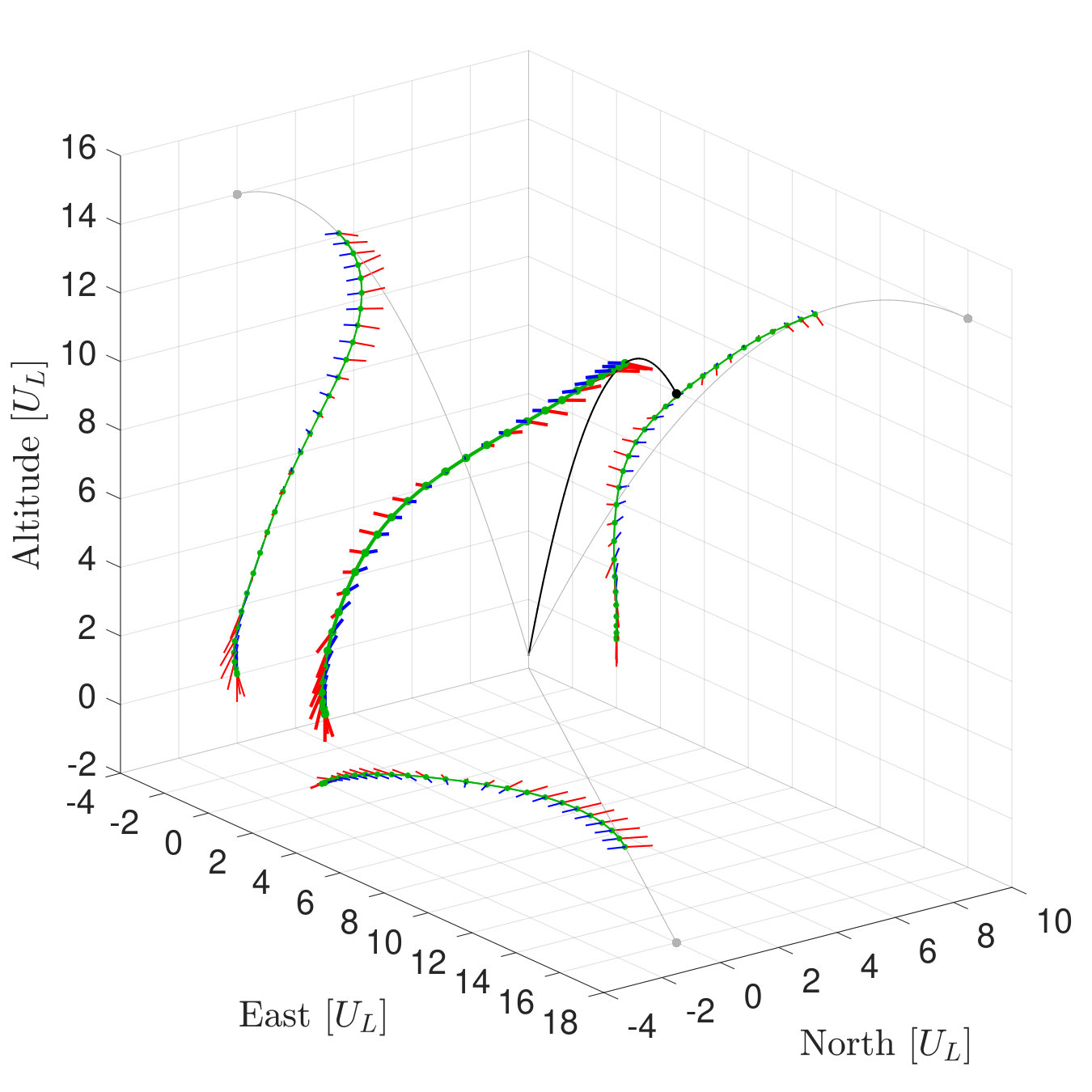 Figure 6
Figure 6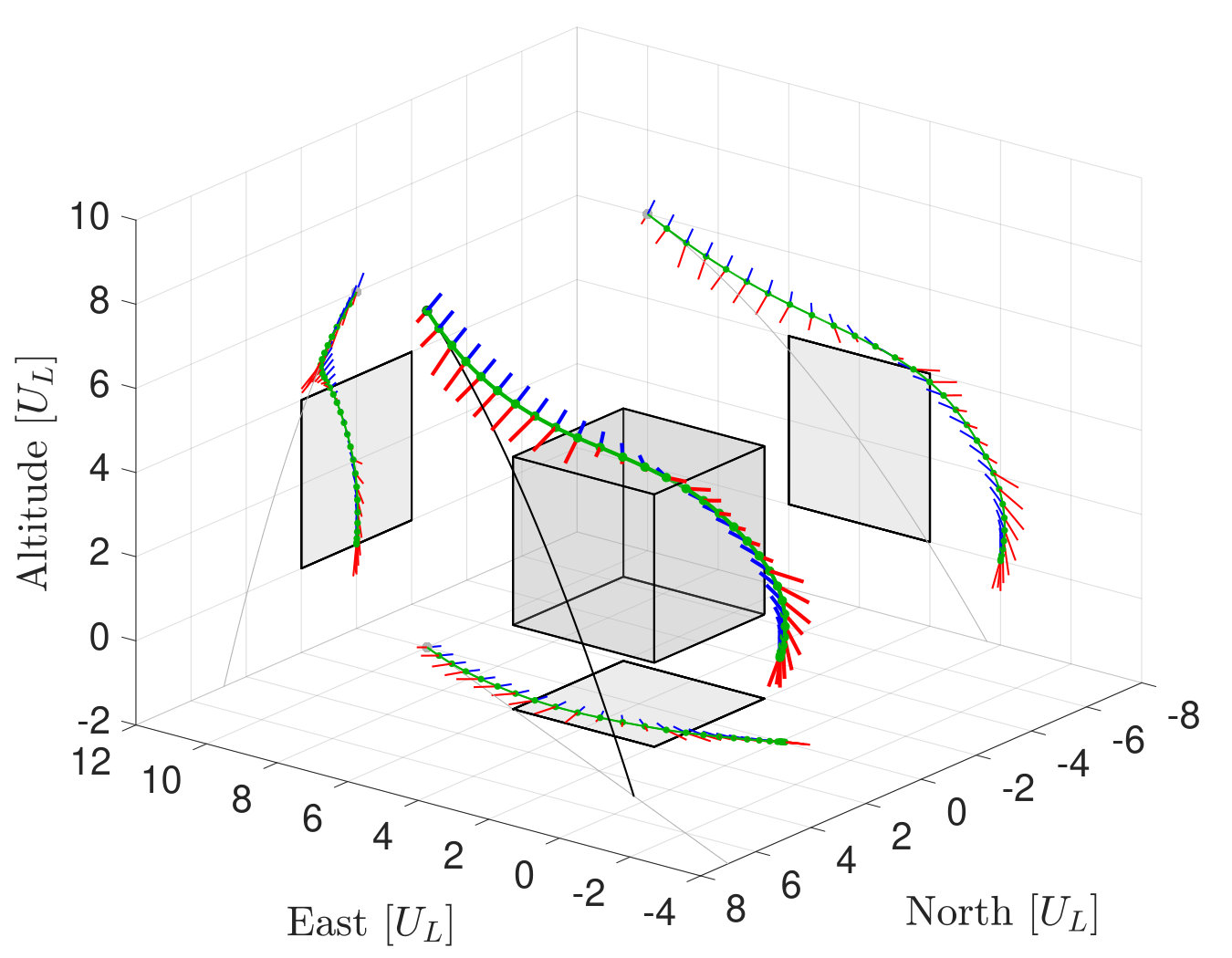 Figure 7
Figure 7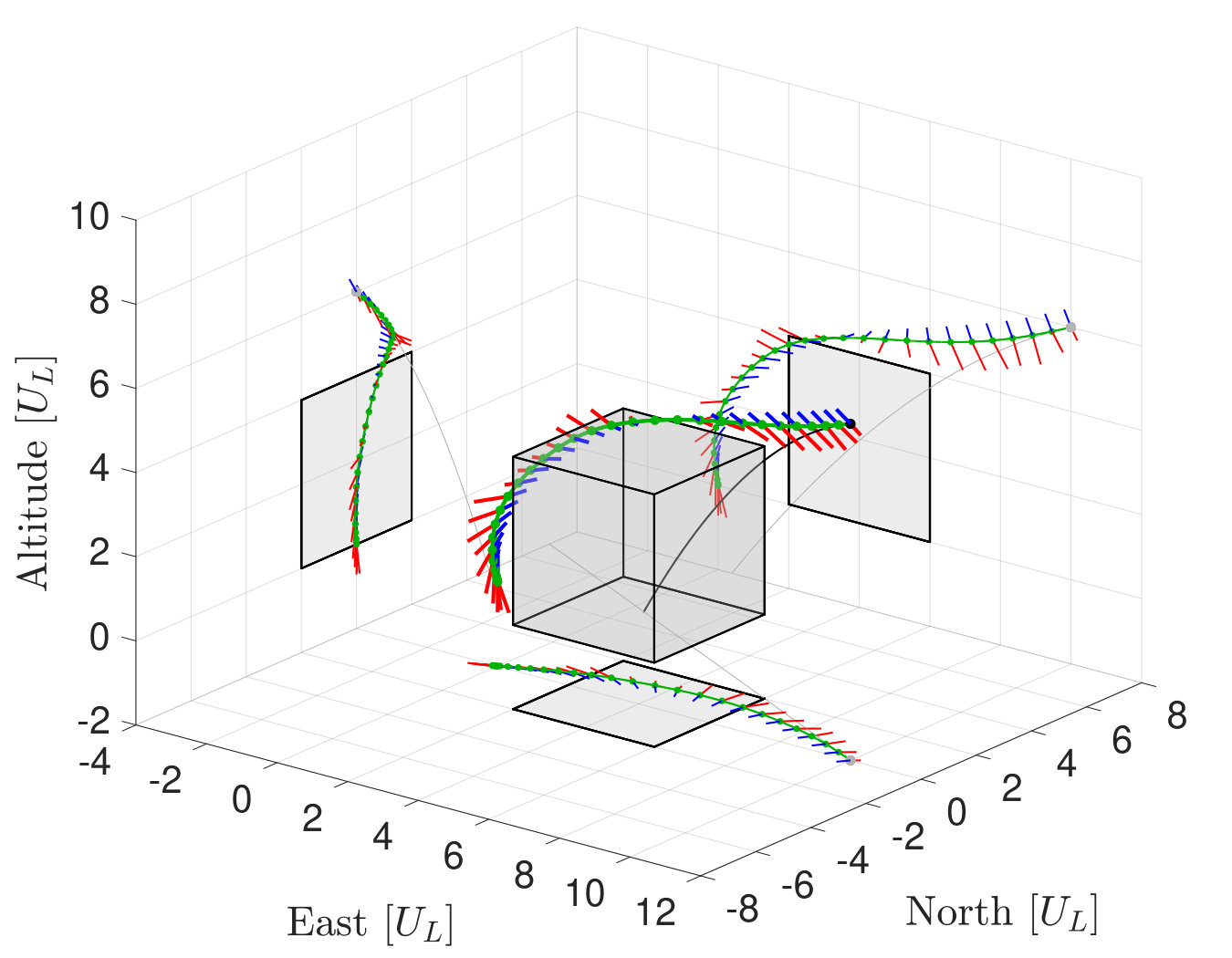 Figure 8
Figure 8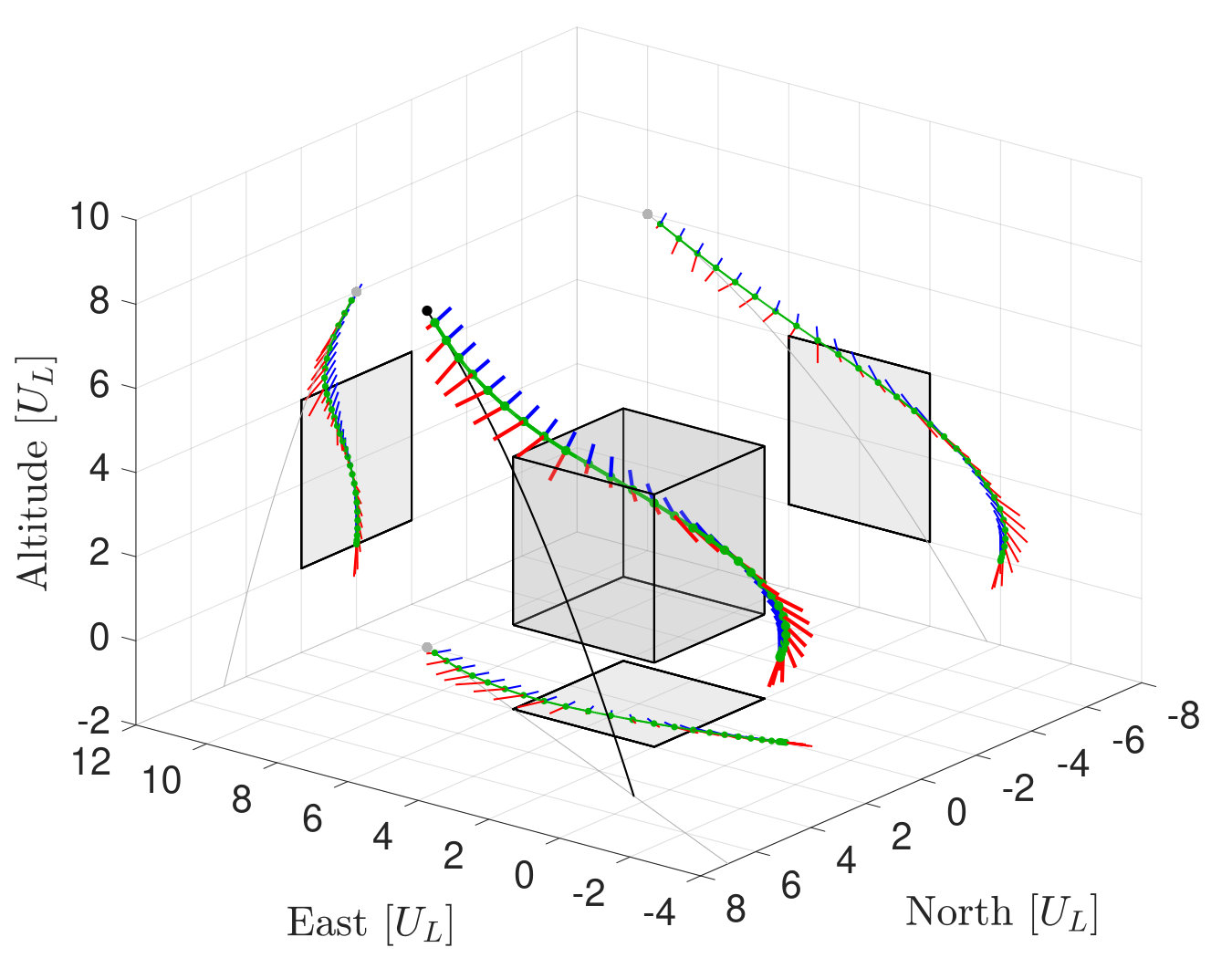 Figure 9
Figure 9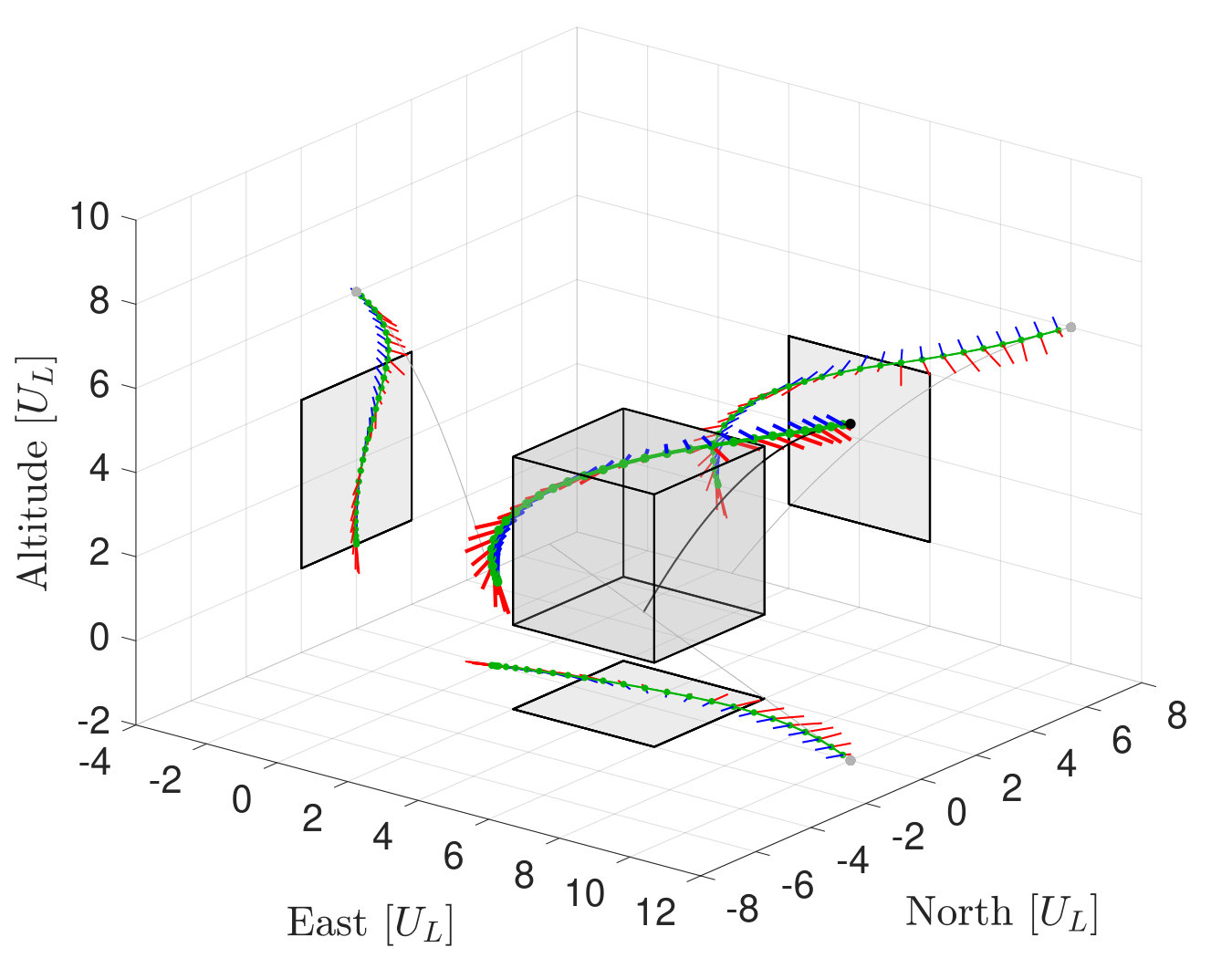 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.