Dynamic buckling of elastic rings in a soap film
Finn Box, Ousmane Kodio, Doireann O'Kiely, Vincent Cantelli, Alain, Goriely, Dominic Vella

TL;DR
This paper investigates the dynamic buckling behavior of elastic rings in soap films when subjected to sudden tension changes, revealing pattern formation influenced by load rate and geometry, with experimental and theoretical insights.
Contribution
It introduces a novel experimental setup to study dynamic buckling patterns in elastic rings within soap films and links pattern selection to load rate and system parameters.
Findings
High-mode buckling patterns depend on aspect ratio and loading dynamics.
Pattern selection can be controlled by adjusting the rate of load application.
Inertia influences pattern emergence but not the pattern type itself.
Abstract
Dynamic buckling may occur when a load is rapidly applied to, or removed from, an elastic object at rest. In contrast to its static counterpart, dynamic buckling offers a wide range of accessible patterns depending on the parameters of the system and the dynamics of the load. To study these effects, we consider experimentally the dynamics of an elastic ring in a soap film when part of the film is suddenly removed. The resulting change in tension applied to the ring creates a range of interesting patterns that cannot be easily accessed in static experiments. Depending on the aspect ratio of the ring's cross section, high-mode buckling patterns are found in the plane of the remaining soap film or out of the plane. Paradoxically, while inertia is required to observe these non-trivial modes, the selected pattern does not depend on inertia itself. The evolution of this pattern beyond the…
Click any figure to enlarge with its caption.
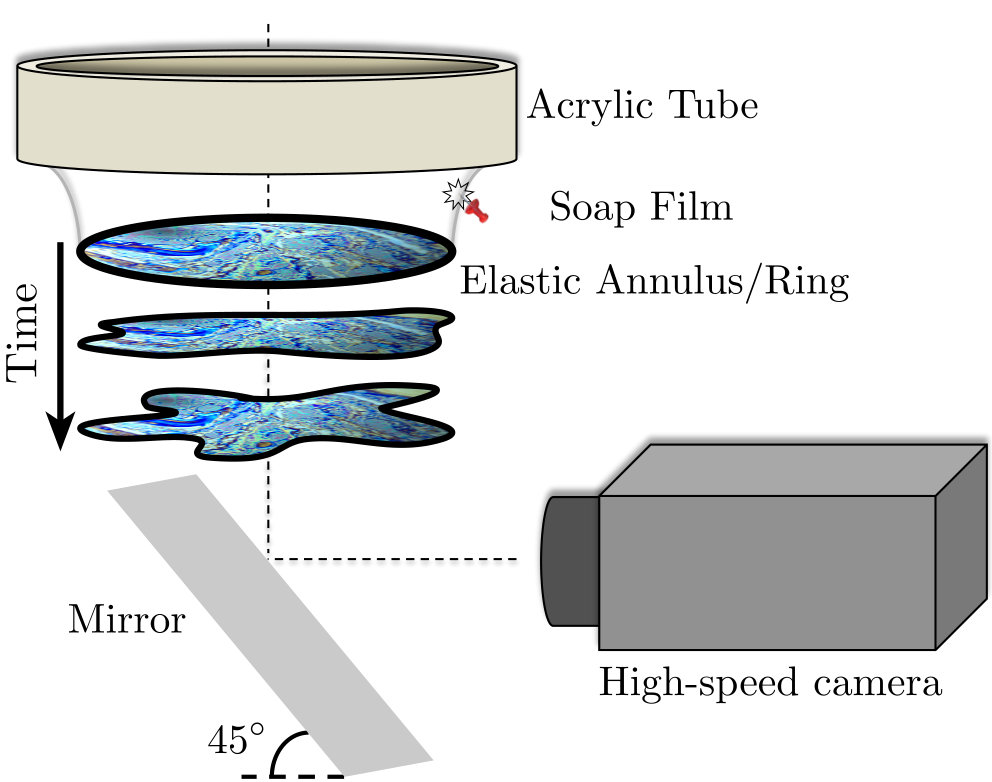 Figure 1
Figure 1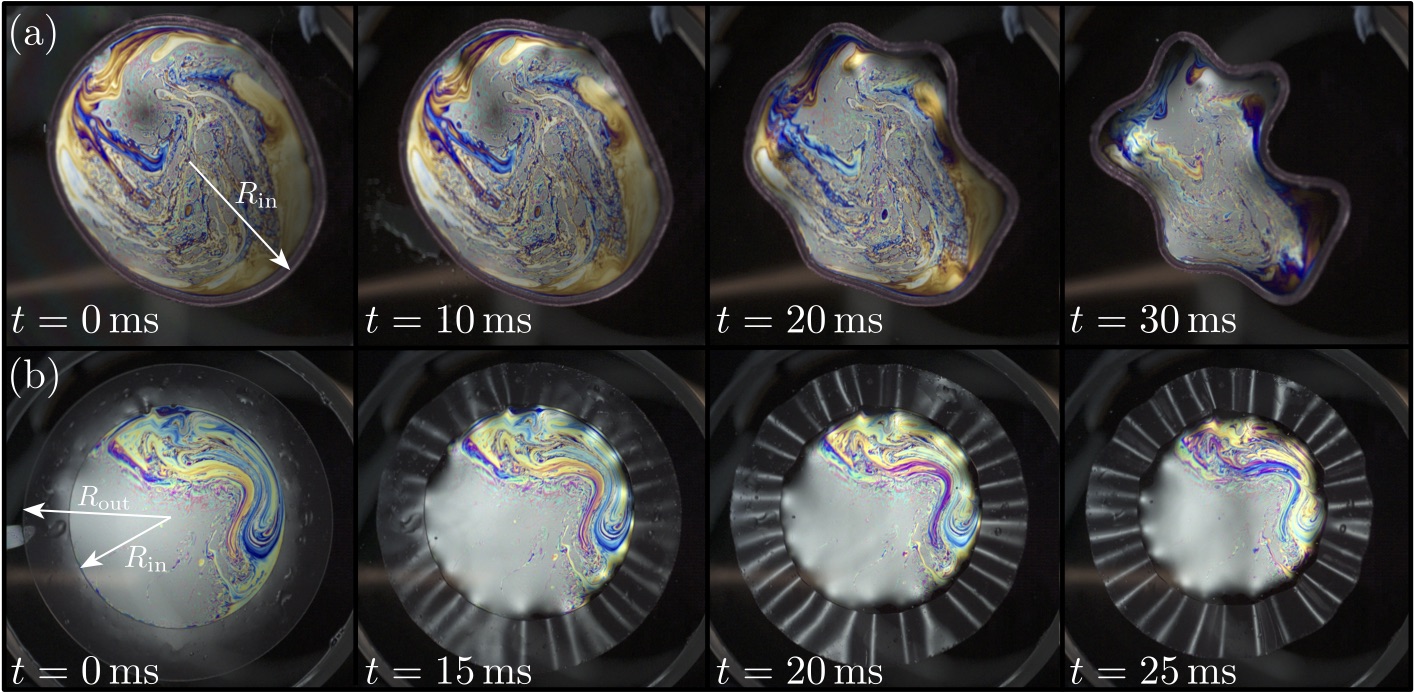 Figure 2
Figure 2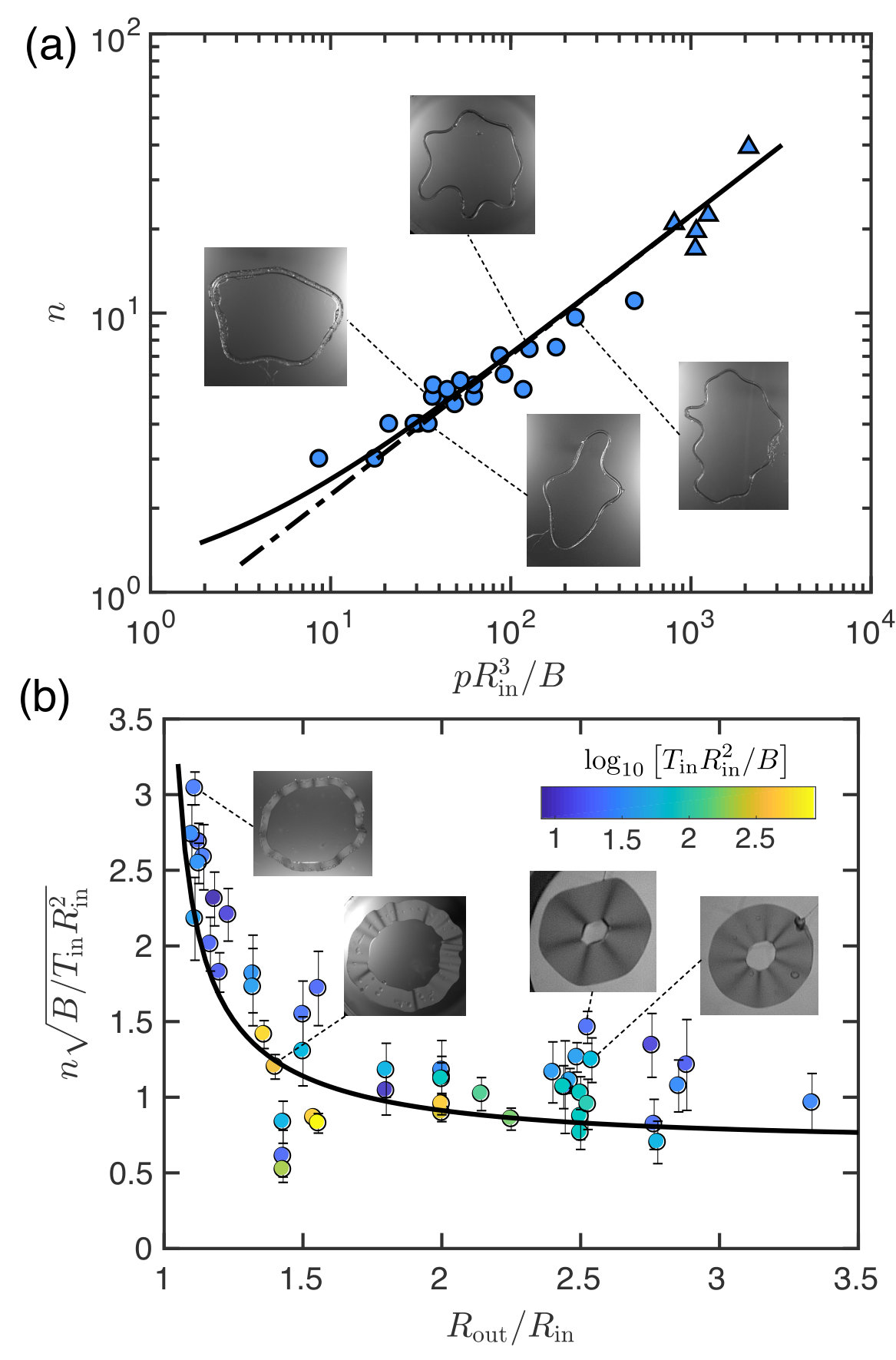 Figure 3
Figure 3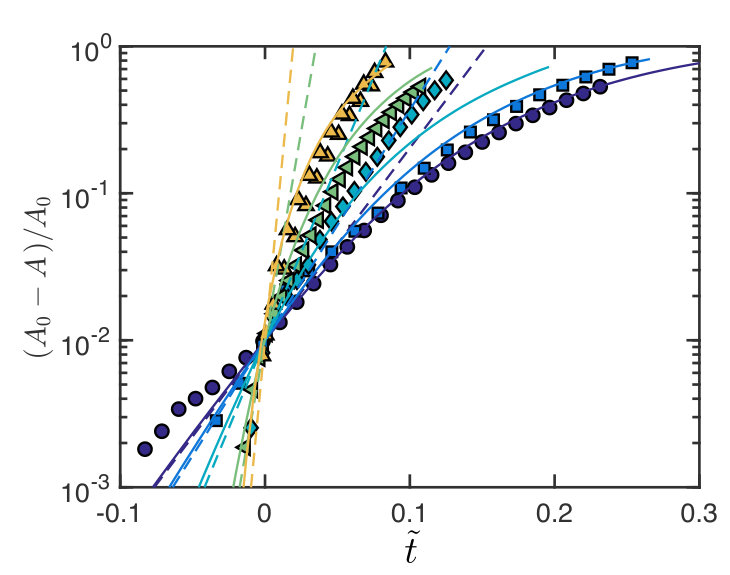 Figure 4
Figure 4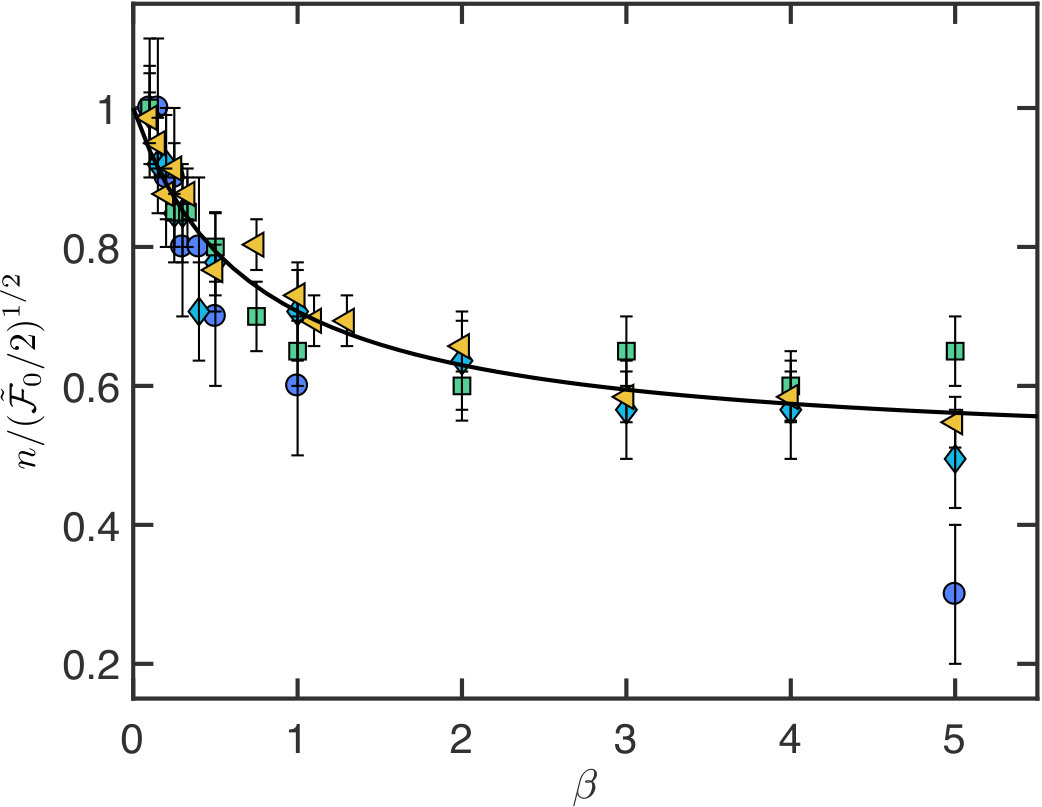 Figure 5
Figure 5Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Dynamic buckling of an elastic ring in a soap film
Finn Box
Mathematical Institute, University of Oxford, Woodstock Rd, Oxford, OX2 6GG, UK
Ousmane Kodio
Mathematical Institute, University of Oxford, Woodstock Rd, Oxford, OX2 6GG, UK
Department of Mathematics, Massachusetts Institute of Technology, Cambridge, Massachusetts 02139, USA
Doireann O’Kiely
Mathematical Institute, University of Oxford, Woodstock Rd, Oxford, OX2 6GG, UK
Department of Mathematics and Statistics, University of Limerick, Limerick, V94 T9PX, Ireland
Vincent Cantelli
Mathematical Institute, University of Oxford, Woodstock Rd, Oxford, OX2 6GG, UK
Alain Goriely
Mathematical Institute, University of Oxford, Woodstock Rd, Oxford, OX2 6GG, UK
Dominic Vella
Mathematical Institute, University of Oxford, Woodstock Rd, Oxford, OX2 6GG, UK
Abstract
Dynamic buckling may occur when a load is rapidly applied to, or removed from, an elastic object at rest. In contrast to its static counterpart, dynamic buckling offers a wide range of accessible patterns depending on the parameters of the system and the dynamics of the load. To study these effects, we consider experimentally the dynamics of an elastic ring in a soap film when part of the film is suddenly removed. The resulting change in tension applied to the ring creates a range of interesting patterns that cannot be easily accessed in static experiments. Depending on the aspect ratio of the ring’s cross section, high-mode buckling patterns are found in the plane of the remaining soap film or out of the plane. Paradoxically, while inertia is required to observe these non-trivial modes, the selected pattern does not depend on inertia itself. The evolution of this pattern beyond the initial instability is studied experimentally and explained through theoretical arguments linking dynamics to pattern selection and mode growth. We also explore the influence of dynamic loading and show numerically that by imposing a rate of loading that competes with the growth rate of instability, the observed pattern can be selected and controlled.
Introduction
A striking feature of elastic buckling is the appearance of wrinkle patterns with a well-defined wavelength; these regular patterns have found a range of applications in the design of structures across length scales Reis (2015); Kim et al. (2012), as well as in the measurement of material properties Stafford et al. (2004); Huang et al. (2007). While compression is required to induce buckling, the wavelength of static wrinkle patterns emerges from a trade-off between an object’s resistance to bending and a resistance to out-of-plane displacement Cerda and Mahadevan (2003). The resulting balance governing pattern formation is therefore usually established by the material properties of the system alone, with few means to change the pattern formed without changing material properties. As a concrete example, consider the compression of a stiff, thin sheet attached to a soft substrate; the wavelength of the resulting wrinkles is set by the ratio of the two elastic moduli, together with the thickness of the thin sheet Stafford et al. (2004) — while a compressive force is required to cause buckling, the wrinkling wavelength varies only weakly with the applied load in such static scenarios Davidovitch et al. (2011).
Dynamic buckling is, however, known to give an alternative route to pattern selection Lindberg and Florence (1987); Gladden et al. (2005); Box et al. (2013). For example, when stretched and released, a rubber band buckles with a well-defined wavelength Vermorel et al. (2007); Oratis and Bird (2019), as does a rubber sheet subject to a normal impact Vermorel et al. (2009), while impacting a brittle rod at one end leads to the formation of fragments with well-defined sizes Gladden et al. (2005). In each of these cases there is no resisting substrate, but the compressive force within the object, , plays a similar role. However, in each of these scenarios, is not directly controlled and must be determined; moreover, evolves along with buckling Gladden et al. (2005); Vermorel et al. (2009); Putelat and Triantafyllidis (2014), further complicating the problem. In this Letter, we present an experimental system that allows a more direct probe of dynamic buckling.
Experiment
Our experimental system consists of an elastic ring of inner and outer radii and , respectively, thickness and Young’s modulus placed within a soap film of surface tension (fig. 1). With soap film filling the inner, , and outer, , voids, the ring is in equilibrium, with a uniform and isotropic tension throughout. However, if the outer soap film is broken (keeping the inner soap film intact) 111Once the outer film is broken, the whole system is in free-fall for , which is longer than the times considered here. then , with unbalanced, pulling the ring inwards. With stiffer boundaries, globally non-flat static solutions are known to exist Giomi and Mahadevan (2012); Chen and Fried (2014); instead of these, we observe relatively high mode number buckling, . Snap-shots of buckling (fig. 2 and see also Supplemental Material 222Movies of buckling are available as Supplementary Information, together with details of the derivation of (5) and illustrative numerical results with ramped loading (8).) illustrate that the form of instability depends on the geometry of the ring: for an elastic ring of square cross-section (i.e. ), instability occurs via in-plane buckling, while for a wide, but thin, ring with (termed an annulus hereafter), instability occurs as out-of-plane wrinkling. Here we report the results of two sets of experiments: (i) with elastic rings, of square cross-section and inner radius and (ii) with elastic annuli of thickness and inner and outer radii and , respectively. These elastic structures were fabricated by casting and spin-coating Polyvinyl Siloxane (Elite Double 8, 22 & 32, Zhermack, with Young’s modulus , measured via indentation, and Poisson ratio ); the surface tension of the soap film was measured, using a Wilhelmy plate, to be .
The patterns observed dynamically are qualitatively similar to those observed in the analogous static systems: for a thin-walled elastic cylinder of infinite length (or a ring of rectangular cross section) subject to an externally applied pressure it is known Windenburg and Trilling (1934); Lindberg and Florence (1987); Amabili and Païdoussis (2003) that the pressure at which buckling occurs is with its bending stiffness. Just above this collapse pressure, the static system adopts a figure-of-eight shape, ultimately leading to self-contact Carrier (1947); Flaherty et al. (1972). While other higher modes of instability exist, they have only been observed by the imposition of an additional breaking of symmetry, e.g. via confinement with a polygonal boundary of the desired mode number Hazel and Mullin (2017). For thin, unconfined elastic annuli, static wrinkling patterns with higher modes of instability are common Cerda and Mahadevan (2003); Huang et al. (2007); Piñeirua et al. (2013); Paulsen et al. (2017), but require two opposing (though not in general equal) tensions to be applied: when in these static systems, the annulus breaks its gross axisymmetry by forming a lenticular or ‘stadium’ shape Paulsen et al. (2017). Since the corresponding static scenarios lead to instability with , the observation in fig. 2 of patterns with mode number is suggestive of a dynamic phenomenon.
Theory and Results
The essential mechanism of dynamic buckling can be understood by considering a one-dimensional beam of bending stiffness and density that is aligned along the -axis Lindberg and Florence (1987). Small beam deflections, , caused by a constant imposed compressive force per unit length, , satsify Howell et al. (2009)
[TABLE]
Neglecting boundary conditions Lindberg and Florence (1987), one finds that the growth rate of a perturbation with wave number satisfies the dispersion relation
[TABLE]
From this dispersion relation, it is clear that all modes with wavenumber are linearly unstable and, further, that the fastest growing mode has with growth rate .
Variants of the above mechanism have been studied previously including: over-damped motion with a spatially-varying compression Kantsler and Goldstein (2012) as well as the crucial role of imperfections Hutchinson and Budiansky (1966) and plastic deformation Lindberg and Florence (1987); Karagiozova and Alves (2008) in many engineering applications. For the dynamic buckling of a ring, previous work has established the unstable mode numbers Wah (1970) but here, we focus on understanding the mode number observed, as well as the evolution beyond the onset of instability while the system remains elastic. To relate our ring experiment to the dynamic buckling of a rod just discussed, we note that the tension applied by the inner soap film, , behaves as a thickness-averaged pressure , which, in combination with the ring curvature, induces an in-plane compression (the analogue of Laplace’s law Boys (1958)) within the ring. Neglecting other effects of the ring curvature, we expect that the observed wavelength of instability , or, equivalently, the number of buckles
[TABLE]
where is a dimensionless measure of the strength of the soap film’s surface tension to the ring’s bending stiffness Giomi and Mahadevan (2012); Chen and Fried (2014). This result is in reasonable agreement with the experimental results shown in fig. 3a 333For large , coarsening of the buckles in one portion of the ring occurred before the outer soap film had fully retracted. In such cases, was inferred from the measured buckling wavelength at onset; in other cases, the value of reported is the maximum number of buckles observed. and is distinct from the scaling observed in rubber band recoil Vermorel et al. (2007). A more detailed model, incorporating the full effects of the ring curvature Kodio et al. (2019), gives indistinguishable from the simplified result (3) for .
The situation for an annulus () is more involved since the stress varies spatially. While wrinkles remain small, we expect the state of stress to remain close to that of the planar Lamé problem Paulsen et al. (2017); in particular the radial and hoop stresses
[TABLE]
Note that the radial stress is tensile, , and the hoop stress compressive , throughout the annulus . Applying the result locally with gives an expected number of wrinkles at the inner edge Note (2)
[TABLE]
The result in (5) may be written as with the appropriate dimensionless pressure and the effect of the width of the annulus characterized by the dimensionless function . Experimental results with show a good collapse when is plotted as a function of (fig. 3b); moreover, the dependence on is close to that expected from (5) (solid curve). Interestingly, as the expression in (5) converges to (3), even though the modes of instability are different (in-plane buckling versus out-of-plane wrinkling).
Crucially, the results of (3) and (5) are very different from the corresponding quasi-static situations in which two-fold symmetry has been reported Flaherty et al. (1972); Paulsen et al. (2017). The key ingredient that distinguishes static scenarios from those considered here is the presence of the elastic object’s inertia. Given this importance of inertia in generating an instability qualitatively different from the static scenario, it seems paradoxical that the inertia itself does not appear to play a role in the final mode selection (eqns (3) and (5) are independent of the object’s density ). To understand this paradox, we note from (2) that the growth rate of the fastest growing mode , does depend on inertia. Our experiments and theoretical arguments assume that the unbalanced tensile load is applied very fast compared to the associated time scale of instability. We therefore hypothesize that imposing the applied load at different rates might give rise to additional control over the observed instability mode, but begin by first measuring the growth rate of instability experimentally.
For an elastic ring the growth rate of the most unstable mode is
[TABLE]
when : for fixed material properties, the growth rate of instability increases with dimensionless pressure. To measure the growth rate of instability, , experimentally, we monitor the area of the central hole enclosed by the ring, , which decreases during the experiment. A weakly-nonlinear analysis Kodio et al. (2019) shows that the change in this area from its initial value, , initially grows at twice the growth rate of instability, i.e. that
[TABLE]
for .
Figure 4 shows the evolution of the experimentally measured relative area change, together with numerical results from a fully nonlinear model Kodio et al. (2019) and the prediction of (7). Both experiments and numerical results show the growth rate expected from (7) at very early times and, further, that nonlinear effects (signified by significant deviations from (7)) become important for smaller values of with larger — a result that is predicted by weakly nonlinear analysis Kodio et al. (2019).
Having confirmed that the growth rate predicted from linear stability analysis corresponds to that measured experimentally, we use numerical simulations to investigate the effect of increasing the compressive force dynamically. The maximum growth rate from (2), , shows that the intrinsic time scale of instability increases with applied load, so one might expect that at early times (small load) a low mode number is excited, but grows slowly — before it has grown appreciably, the compression has increased and a new fastest growing mode emerges, that grows faster, rapidly overtaking the earlier lower mode. Since our earlier analyses have shown that ring curvature has minimal effects in the early stages of instability, we test this possibility with numerical simulations of the one-dimensional beam equation (1) for a beam of length with pinned boundary conditions, ), and a Gaussian initial condition, subject to a time-dependent compressive force
[TABLE]
with the dimensionless time.
The exponent describes the rate of loading: corresponds to the step-function loading assumed so far, and to constant ramping rate. Numerical results for the mode number observed at are shown in fig. 5 for a range of dimensionless maximum compressions as a function of . Each value of gives a different mode number even if imposed as a step function (see inset of fig. 5); fig. 5 therefore shows results normalized by leading to good collapse for large .
To understand this behaviour qualitatively, we estimate the dimensionless time, , at which the pattern observed at is formed; we do this by requiring the argument of the exponential in our linear perturbation at , , be comparable to that at the time of observation, , i.e. for some constant of proportionality ; we find and, using ,
[TABLE]
We note that this scaling argument is reminiscent of the Kibble–Zurek mechanism for the size of defects observed during a continuous non-equilibrium phase transition as the quenching rate changes del Campo and Zurek (2014); Stoop and Dunkel (2018).
The general form of (9) with is in reasonable agreement with the observations from numerical simulations (dashed line in fig. 5), although for small , the errors caused by wrinkle discreteness are non-negligible.
Conclusion
In this Letter we have studied the dynamic buckling of elastic rings and annuli subject to a controlled compressive force. We have shown that pattern selection in this system depends on the geometry of the ring (its thickness-to-width ratio) as well as its mechanical properties. Although it is the presence of inertia that allows for the selection of modes of instability other than those observed in static scenarios, the inertia itself does not affect the observed mode number when the load is applied sufficiently quickly. Otherwise, modification of the rate of loading is itself enough to select different buckling patterns — a new approach through which different morphologies may be selected in a particular system. Moreover, because pattern selection occurs whilst the object deforms elastically (and not plastically Lindberg and Florence (1987) or fracturing brittlely Gladden et al. (2005)) changing this dynamic loading might provide a new route for changing the pattern observed in repeated runs with the same elastic object.
Acknowledgements.
This research was supported by the European Research Council under the European Horizon 2020 Programme, ERC Grant Agreement no. 637334 (DV), the Leverhulme Trust via a Philip Leverhulme Prize (DV) and the Engineering and Physical Sciences Research Council grant EP/R020205/1 (AG). We are grateful to Alfonso-Castrejón-Pita for the loan of the color high-speed camera used to take the images of fig. 2.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Reis (2015) P. M. Reis, “A perspective on the revival of structural (in)stability with novel opportunities for function: From Buckliphobia to Buckliphilia,” J. Appl. Mech. 82 , 111001 (2015).
- 2Kim et al. (2012) J. B. Kim, P. Kim, N. C. Pegard, S. J. Oh, C. R. Kagan, J. W. Fleischer, H. A. Stone, and Y.-L. Loo, “Wrinkles and deep folds as photonic structures in photovoltaics,” Nat. Photonics 6 , 327–332 (2012).
- 3Stafford et al. (2004) C. M. Stafford, C. Harrison, K. L. Beers, A. Karim, E. J. Amis, M. R. van Landingham, H.-C. Kim, W. Volksen, R. D. Miller, and E. E. Simonyi, “A buckling-based metrology for measuring the elastic moduli of polymeric thin films,” Nat. Mater. 3 , 545–550 (2004).
- 4Huang et al. (2007) J. Huang, M. Juskiewiscz, W. H. de Jeu, E. Cerda, T. Emrick, N. Menon, and T. P. Russell, “Capillary wrinkling of floating thin polymer films,” Science 317 , 650–653 (2007).
- 5Cerda and Mahadevan (2003) E. Cerda and L. Mahadevan, “Geometry and physics of wrinkling,” Phys. Rev. Lett. 90 , 074302 (2003).
- 6Davidovitch et al. (2011) B. Davidovitch, R. D. Schroll, D. Vella, M. Adda-Bedia, and E. Cerda, “Prototypical model for tensional wrinkling in thin sheets,” Proc. Natl. Acad. Sci. USA 108 , 18227–18232 (2011).
- 7Note (2) See Supplementary Information , for movies of buckling together with details of the derivation of ( 5 \@@italiccorr ) and illustrative numerical results with ramped loading ( 8 \@@italiccorr ) .
- 8Lindberg and Florence (1987) H. E. Lindberg and A. L. Florence, Dynamic Pulse Buckling: Theory and Experiment (Martinus Nijhoff, Dordrecht, 1987).