TL;DR
This paper develops a game-theoretic framework for evasive path planning under surveillance uncertainty, addressing both worst-case and average-case scenarios with strategies computed via convex optimization and dynamic programming.
Contribution
It introduces a novel approach combining game theory and optimal control to solve evasive path planning with uncertain surveillance plans, including a method for approximating Nash equilibria.
Findings
Efficient algorithms for worst-case and average-case evasive strategies.
Numerical examples demonstrating the approach's effectiveness.
Discussion of computational complexity for multiple evaders.
Abstract
The classical setting of optimal control theory assumes full knowledge of the process dynamics and the costs associated with every control strategy. The problem becomes much harder if the controller only knows a finite set of possible running cost functions, but has no way of checking which of these running costs is actually in place. In this paper we address this challenge for a class of evasive path planning problems on a continuous domain, in which an Evader needs to reach a target while minimizing his exposure to an enemy Observer, who is in turn selecting from a finite set of known surveillance plans. Our key assumption is that both the evader and the observer need to commit to their (possibly probabilistic) strategies in advance and cannot immediately change their actions based on any newly discovered information about the opponent's current position. We consider two types of…
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5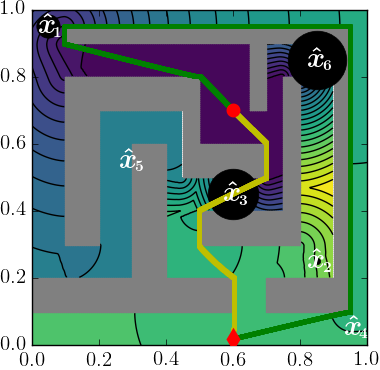 Figure 6
Figure 6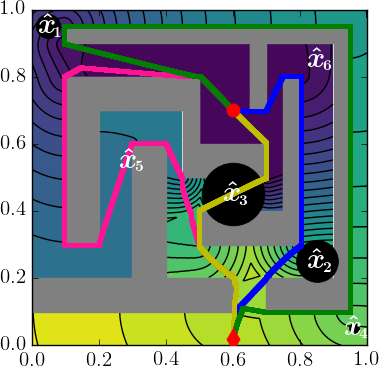 Figure 7
Figure 7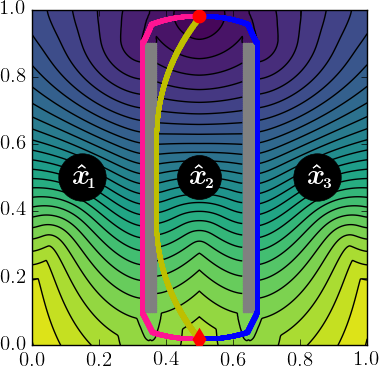 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13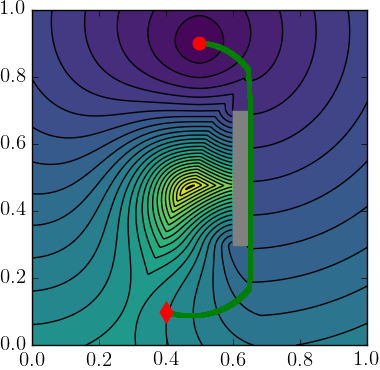 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17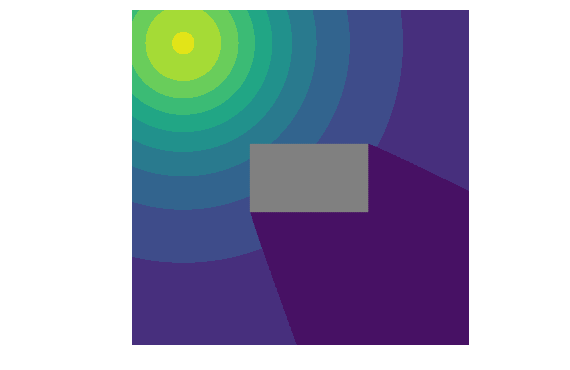 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20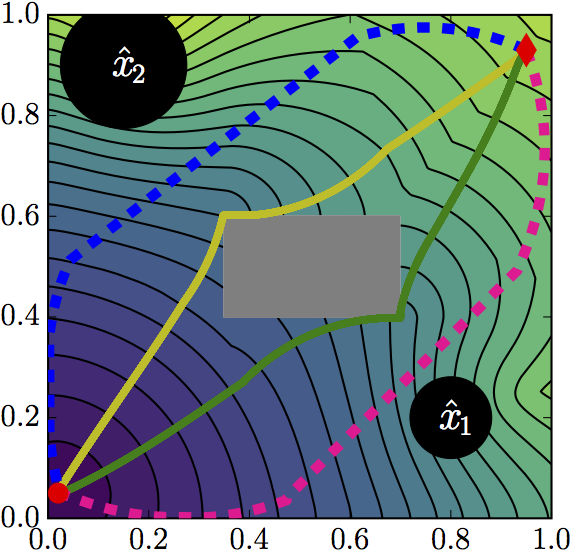 Figure 21
Figure 21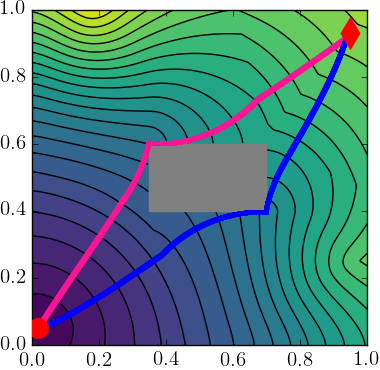 Figure 22
Figure 22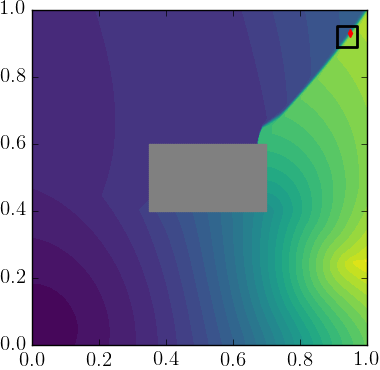 Figure 23
Figure 23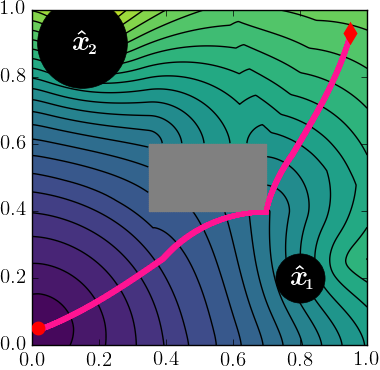 Figure 24
Figure 24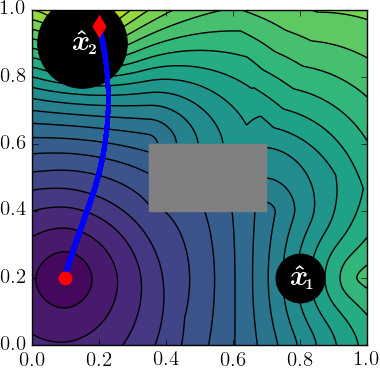 Figure 25
Figure 25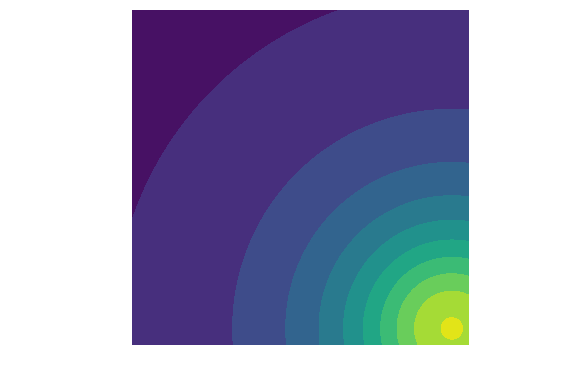 Figure 26
Figure 26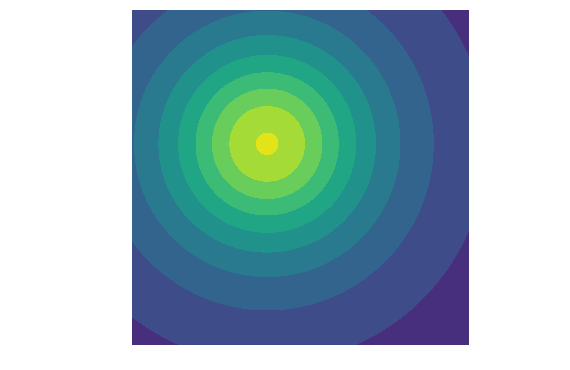 Figure 27
Figure 27 Figure 28
Figure 28 Figure 29
Figure 29Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Code & Models
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
