Recognition of symmetries in reversible maps
Patr\'icia H. Baptistelli, Isabel S. Labouriau, Miriam Manoel

TL;DR
This paper investigates the symmetries of reversible germs of diffeomorphisms, revealing that their reversing symmetry groups are generally infinite and providing geometric insights into their discrete dynamics, especially in the generic case.
Contribution
It establishes that reversing symmetry groups of reversible germs are typically infinite, contrasting with continuous dynamics, and introduces geometric tools to analyze their fixed-point structures.
Findings
Reversing symmetry groups are generally infinite.
Fixed-point subspaces provide geometric insights into dynamics.
Results apply to generic cases with transversal linear involutions.
Abstract
We deal with germs of diffeomorphisms that are reversible under an involution. We establish that this condition implies that, in general, both the family of reversing symmetries and the group of symmetries are not finite, in contrast with continuous-time dynamics, where typically there are finitely many reversing symmetries. From this we obtain two chains of fixed-points subspaces of involutory reversing symmetries that we use to obtain geometric information on the discrete dynamics generated by a given diffeomorphism. The results are illustrated by the generic case in arbitrary dimension, when the diffeomorphism is the composition of transversal linear involutions.
Click any figure to enlarge with its caption.
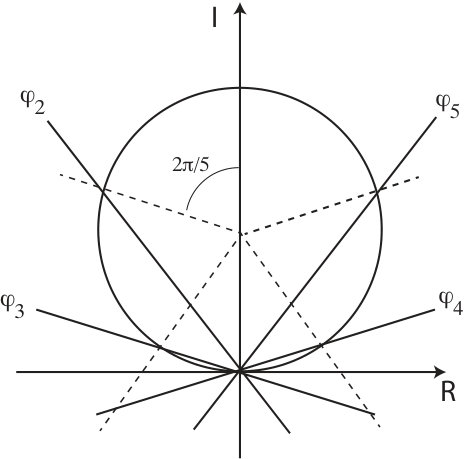 Figure 1
Figure 1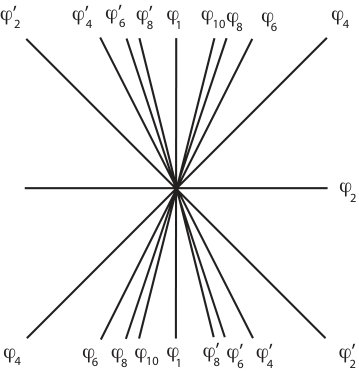 Figure 2
Figure 2 Figure 3
Figure 3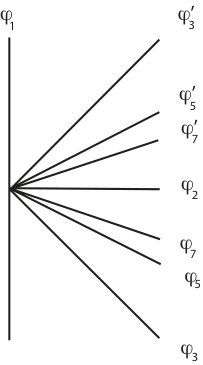 Figure 4
Figure 4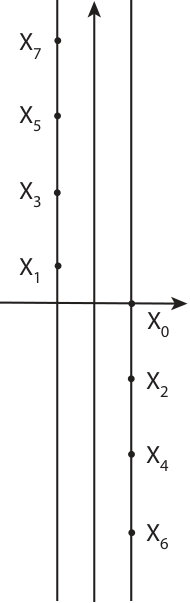 Figure 5
Figure 5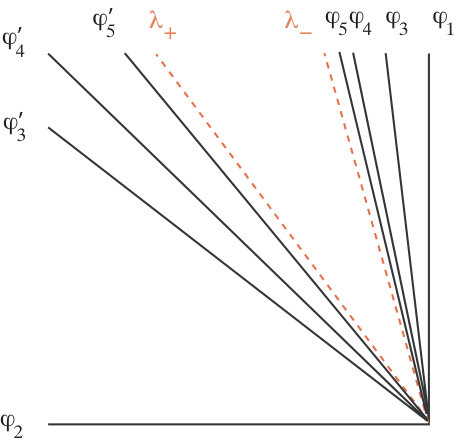 Figure 6
Figure 6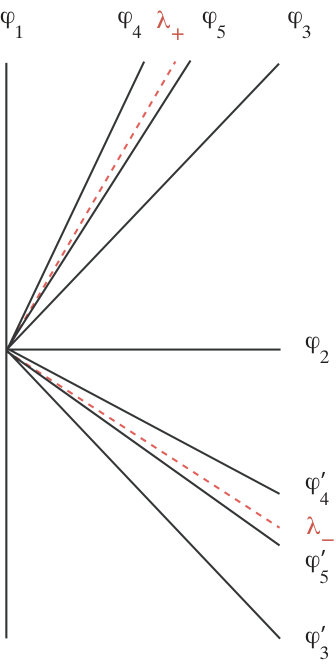 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Recognition of symmetries in reversible maps
Patrícia H. Baptistelli, Isabel S. Labouriau and Miriam Manoel
Abstract.
We deal with germs of diffeomorphisms that are reversible under an involution. We establish that this condition implies that, in general, both the family of reversing symmetries and the group of symmetries are not finite, in contrast with continuous-time dynamics, where typically there are finitely many reversing symmetries. From this we obtain two chains of fixed-points subspaces of involutory reversing symmetries that we use to obtain geometric information on the discrete dynamics generated by a given diffeomorphism. The results are illustrated by the generic case in arbitrary dimension, when the diffeomorphism is the composition of transversal linear involutions.
Patrícia H. Baptistelli111Email address: [email protected]
Departamento de Matemática, CCE
Universidade Estadual de Maringá
Av. Colombo, 5790, 87020-900
Maringá, Brazil
Isabel S. Labouriau222Email address: [email protected]
Centro de Matemática
Universidade do Porto
Rua do Campo Alegre, 687, 4169-007
Porto, Portugal
Miriam Manoel333Email address: [email protected]
Departamento de Matemática, ICMC
Universidade de São Paulo
13560-970 Caixa Postal 668,
São Carlos, Brazil
2010 MSC: 58J70, 37C80, 93C55
Keywords: reversible map, involutions, symmetry, fixed-point subspace
1. Introduction
Symmetry occurs in many different contexts. It has driven attention in many fields of Mathematics and related areas whenever existence and analysis of patterns become relevant. Symmetric objects have characteristic features that are not present in generic objects. Symmetry carries geometric information that facilitates the study of such objects. One particularly important kind of symmetry – or reversing symmetry, as we shall say – is given by an involution. For a local study in , this is defined as the germ of a diffeomorphism satisfying namely a germ of diffeomorphism which is its own inverse. We point out that many results in the present work are algebraic, so it shall be clear that those also hold for general invertible maps. For the same reason, although formulated for diffeomorphisms, our results often do not require differentiability and hold for homeomorphisms.
One branch of applications of reversing symmetries comes from dynamical systems. We refer to [4] for references on reversibility and related problems. For discrete dynamics governed by the iteration of a (germ of) diffeomorphism , we recall that this is called reversible under a (germ of) diffeomorphism , or simply -reversible, if . In other words, the symmetric copy of a trajectory is also a trajectory with time reversed. If happens to be reversible under an involution , it follows that it can be decomposed as , for some involution . Yet, is also -reversible. As a consequence, contrary to the continuous case, reversible discrete dynamical systems always have more than one reversing involution. We remark that there exist reversing symmetries that are not involutions, even for linear isomorphisms; for example, symmetric matrices are reversible under the rotation of . Here we assume throughout that has an involutory reversibility. In this case, interesting dynamics resides in the class governed by diffeomorphisms that possess an infinite number of involutions. In algebraic terms, if and generate an Abelian group, then these are simultaneously linearizable, as a consequence of the Bochner-Montgomery theorem about linearization of a compact group of transformations around a fixed point (see [7]). In our setting, the two involutions generate a discrete group which may be non-Abelian and is generally noncompact. Then, a natural question raised in this set-up regards the local linearization around a fixed point. The simultaneous linearization and transversality of and is a sufficient condition for the linearization of (see [5] for more on this topic). Also, pairs of involutions are linearizable provided is a hyperbolic germ of diffeomorphism [9]. The work in [6] extends this result to normally hyperbolic. In the first case, the fixed-point set of reduces to a point; in the second case, it can be a local submanifold with positive dimension. Normally hyperbolic examples are treated in [2].
In the present work, simultaneously linearizable involutions are treated as a particular case of our results. Sets of linear involutions are treated in Section 3 for the planar case and in Section 4 for higher dimensions.
Another branch of applications comes from Singularity theory in the study of divergent diagrams of folds (see, for example, [5, 8, 10]). We recall that given a fold , there exists a unique nontrivial involution associated with , that is, such that . In [5] the authors prove that equivalent classes of -tuples of divergent diagram of folds, for finite, are described through the simultaneous equivalence of the associated -tuples of involutions. Here we remark that the same holds for an infinite sequence of folds. In addition, it follows that the study of singular sets of folds is deduced directly from the description of fixed-point subspaces of involutions we present here, once the singular set of is precisely the fixed-point submanifold of the associated involution . Further investigation on this topic is carried out in [1].
Here is what we shall encounter in the next sections. In Section 2 we recall some basic definitions and properties; we also present the main general results regarding symmetries and reversing symmetries of a reversible germ of diffeomorphism . We establish in Theorem 2.8 the existence of a chain of fixed-point subspaces of the (infinite) sequence of reversing involutions which must be tracked by the iterates of . In the particular case when the fixed-point submanifolds of and have codimension 1, Theorem 2.13 describes the orbits of points in the complement in of these fixed-point submanifolds. The connected components of this complement are interchanged by . We also use the chain of fixed-point subspaces to find periodic points. In Section 3 the results of the Section 2 are applied to the class of pairs of transversal linear involutions on the plane. This is done using the normal forms obtained in [5] under the equivalence given by simultaneous conjugacy. We also relate the reversible dynamics to the geometry of the chain of fixed-point subspaces of the reversing involutions. In Section 4 we use the results of Section 3 to extend the analysis to dimension greater or equal to three. Here we use again normal forms of transversal linear involutions given in [5] which, for almost all cases, are suspensions of the normal forms on the plane.
In short, Section 2 contains general results on reversible diffeomorphisms. These results are illustrated by detailed descriptions of the geometry in two dimensions (Section 3) and in higher dimensions (Section 4).
2. Reversibility and equivariance
The local study developed in this paper is assumed to be about the origin . Hence, we shall work with the notion of a germ: Let be a mapping defined on a neighborhood of [math] such that . The germ of at [math], denoted by , is the set of mappings such that there is a neighborhood of [math] with . When is a diffeomorphism, we say that is a germ of a diffeomorphism.
Let be the group under composition of the invertible maps on acting on by the standard action of application,
[TABLE]
Definition 2.1**.**
Let A germ of a diffeomorphism is -equivariant if . It is -reversible if In the first case, is a symmetry of and in the second case is a reversing symmetry of .
Note that if is -reversible then so is For a given germ of diffeomorphism of we denote by the group formed by the symmetries of and by the set of reversing symmetries of that is,
[TABLE]
In general, the set doesn’t have a group structure. Indeed, if, and only if, which is equivalent to , where denotes the germ of the identity map on . This is the only case for which is a group. For , we have that is closed under inversion, but composition of two reversing symmetries belongs to Moreover, we can write for any fixed (and arbitrary). For we have
[TABLE]
hence Conversely, if then
Definition 2.2**.**
An involution is a germ of a diffeomorphism satisfying
From now, we assume that there exists an involution in In [5] it has been recognized that, in this case, reversible diffeomorphisms are in 1–1 correspondence with pairs of involutions. In fact, if is an involution then is -reversible if, and only if, for the involution . We now also remark that, in this case, is -reversible too, for
[TABLE]
Hence corresponds to the pair of reversing symmetries . In what follows we show that, more than one pair, there are actually two infinite sequences of involutions and such that is - and -reversible if for all . We take
[TABLE]
This definition is consistent for and with
Proposition 2.3**.**
Let be an involution and let be a -reversible germ of diffeomorphism such that for all . Then has an infinite group of symmetries and an infinite set of reversing symmetries.
Proof.
is clearly a symmetry of itself, so the subgroup generated by ,
[TABLE]
is formed by symmetries, and then is infinite. Furthermore, all and defined in (2) are different elements in so is infinite. ∎
Examples are given in Sections 3 and 4.
Definition 2.4**.**
Given a germ of a diffeomorphism , the -orbit of a point is the ordered set . When is clear from the context we just call this set the orbit of .
If is the germ of a -reversible diffeomorphism, then maps the -orbit of into the -orbit of , preserving the order.
2.0.1. The fixed-point sets
Definition 2.5**.**
The fixed-point set of a map-germ is
[TABLE]
and the fixed-point set of a subgroup is
[TABLE]
If is linear and is a subgroup of the linear group then and are naturally extended to the whole as linear subspaces of . It follows that the fixed-point set of any involution is a smooth submanifold in , since is conjugate to the germ of its linear part at the origin (see [6, Lemma 2.2]). Denote by the linear subspace generated by .
The following result is classical and extensively used in equivariant continuous-time dynamics:
Lemma 2.6**.**
Let be a germ of an equivariant diffeomorphism with symmetry group . If is a subgroup, then is -invariant.
Proof.
A point belongs to if, and only if, for all . Then if is equivariant, we have for all . Hence . ∎
Fixed-point sets of symmetries of are therefore invariant under the discrete dynamics ruled by . There is no similar result for . Firstly, subsets of do not have a group structure. In addition, if is a subset of and , then for all . Concerning reversing symmetries, we have:
Lemma 2.7**.**
Let be an involution and let be a -reversible germ of diffeomorphism. Consider the two sequences of reversing symmetries of given in (2). The following equalities hold:
[TABLE]
Proof.
Consider , i.e., . If , then
[TABLE]
so .
For the other inclusion, let Then
[TABLE]
and, therefore, for . Also, .
The equalities for the other sequence are obtained analogously. ∎
Theorem 2.8**.**
Applying to the fixed-point submanifolds of the involutions of (2) the following chains are obtained:
[TABLE]
[TABLE]
[TABLE]
for
Proof.
Similar calculations to those of Lemma 2.7 give
[TABLE]
We now use Lemma 2.7 to get the result. ∎
If for any and we have either or or then the whole chain in (3) containing one of these fixed-point manifolds is finite.
The following is also a direct consequence of Lemma 2.7:
Corollary 2.9**.**
All fixed-point submanifolds of the involutions of (2) with odd index have dimension equal to , and the ones for even index have dimension equal to .
It should be stressed that dynamically and geometrically relevant results should not depend on the choice of coordinates. Proposition 2.11 below establishes this point. Before stating it we define the equivalence of two sets of involutions which is given by simultaneous conjugacy:
Definition 2.10**.**
Two pairs and of involutions on are equivalent if there exists a germ of diffeomorphism such that for If is a germ of a linear isomorphism, we say that and are linearly equivalent.
For two equivalent pairs of involutions and , it follows that for each , the two pairs and constructed in (2) for and respectively, are equivalent. In addition, and are also conjugate, so they generate equivalent dynamics. These equivalences are clearly governed by the same , which directly implies the following:
Proposition 2.11**.**
The equalities in Lemma 2.7 and the chains in Theorem 2.8 are invariant under equivalence.
The next result gives a sufficient condition for an orbit starting at a fixed-point submanifold to be periodic:
Proposition 2.12**.**
For any reversing symmetry of , if and if there exists such that , then the orbit of is periodic. In addition, for the sequences of reversing symmetries of in (2) and we have:
- (A)
If then the orbit of is a periodic orbit with period that divides Also, if is a periodic point with period that divides and then 2. (B)
If then the orbit of is a periodic orbit with period that divides . Also, if is a periodic point with period that divides and then 3. (C)
If , then the orbit of is a periodic orbit with period that divides . Also, if is a periodic point with period that divides and then
Proof.
The first part is straightforward, just noticing that implies that
[TABLE]
For the statements (A)–(C) we use (2) to get
[TABLE]
The periodicity then follows from for (A) and similarly for (B) and for (C).
∎
A particular case of the proposition above can be found in [3], namely when the whole space has even dimension and the fixed-point subspaces are -dimensional submanifolds of .
From Corollary 2.9, if , then the fixed-point submanifolds split into connected regions. The result below describes how the dynamics by behaves with respect to these regions.
Theorem 2.13**.**
Let be two involutions with . Let , , , be as in (2). Then interchanges the connected components of the germ at the origin of
[TABLE]
determined by these fixed-point submanifolds.
Proof.
Take a region whose boundary is determined by the fixed-point manifolds of involutions By path connectedness of and Lemma 2.7, the boundary of is determined by , with where each pair and consists of consecutive elements in one of the chains in (3), that is,
[TABLE]
Therefore, is another component.
It remains to consider the case when part of the boundary of a connected component of the complement is not contained in a fixed-point manifold of any involution in (see the examples of Subsections 3.3.2, 3.3.4 and 4.1). This happens when the boundary of meets the set of accumulation points of these fixed-point manifolds. We claim that . Indeed, a point may be written as with for some . Since is a homeomorphism, then . Lemma 2.7 implies that for some , establishing the claim. It follows that if the boundary of a component consists of accumulation points of fixed-point subspaces, then is mapped by into a component with the same type of boundary. The same is true if the boundary of contains both elements of fixed-point submanifolds and elements of , completing the proof. ∎
We now define transversality of two involutions. This is a generic condition we assume for the pairs of involutions treated in the next sections.
Definition 2.14**.**
Two involutions on are transversal if and are in general position at 0, i.e.,
[TABLE]
where denotes the tangent space to at 0, .
In the next two sections we apply the previous results to analyse the behavior of a -reversible germ of diffeomorphism associated with a pair of transversal linear involutions on for and respectively. For this, we restrict our study to the linear case, considering the group of symmetries and the set of reversing symmetries defined in (1), as subsets of the linear group and keeping the notation introduced in this section.
3. Dynamics and geometry of linear reversible maps on the plane
In this section we consider a germ of diffeomorphism on where and are transversal linear involutions (Definition 2.14). We present the results up to equivalence of pairs of involutions given by simultaneous conjugacy. Hence, the pair is considered to be in normal form, which is given in [5, Theorem 6.2]. For that, we first recall the definition of the antipodal subspace of a linear involution on
[TABLE]
Notice that Denote by the group generated by and There are three cases to be considered:
- (i)
is Abelian; 2. (ii)
is non-Abelian and 3. (iii)
is non-Abelian and
Our aim is to investigate, for the cases above, the fixed-point subspaces of the reversing involutions in and their relation to the dynamics generated by Let us denote by the group generated by and by the 2-element group generated by
3.1. is Abelian
This is a trivial case. By [5, Theorem 6.2], is equivalent to where
[TABLE]
so Since the dynamics is rather degenerate because all the -orbits (except the origin) are periodic of period 2. Moreover,
[TABLE]
for all Therefore, and the fixed-point subspaces and divide the plane into four connected components that are interchanged by (Theorem 2.13).
Moreover, while and
3.2. is non-Abelian and
By [5, Theorem 6.2], is equivalent to where
[TABLE]
In this case whose eigenvalues are with geometric multiplicity 1. Writing where
[TABLE]
we have for all which implies that
[TABLE]
Yet,
[TABLE]
[TABLE]
for all Therefore, the fixed-point subspaces of and approach the -axis as tends to infinity (see Figure 1).
For the dynamics, we use the expression of to conclude that the -axis is -invariant and that the orbits of all its points, except the origin, have period 2. For the other points, by linearity, it suffices to look at the orbits of points given by , as illustrated in Figure 1, on the right. This case provides an interesting illustration of Theorem 2.13. For instance, the sector between and is mapped onto the sector between and . Also, the sector between and is mapped onto the sector between and . See Figure 1 on the left.
Symmetries and reversing symmetries are as follows:
[TABLE]
[TABLE]
both manifolds of dimension 2.
3.3. is non-Abelian and
Let us denote From [5, Theorem 6.2], is equivalent to where
[TABLE]
The analysis here considers all possibilities for the parameter which is an invariant under linear simultaneous conjugacy. We have
[TABLE]
whose eigenvalues
[TABLE]
satisfy Notice that if, and only if, respectively. A direct calculation gives the group of symmetries of
[TABLE]
and the set of reversing symmetries of
[TABLE]
both manifolds of dimension 2.
Since the normal form of depends only on the parameter we have subdivided this subsection in four cases. In all of them the group of symmetries and the set of reversing symmetries generated by and are given respectively by and .
3.3.1. Normal form (4) with
In this case, whose eigenvalues are with geometric multiplicity 1. Writing where is a nilpotent matrix of index 2, we have for all which implies that
[TABLE]
Therefore
[TABLE]
[TABLE]
for all The fixed-point subspaces of and approach the -axis as tends to infinity, which is an -invariant line (see Figure 2).
3.3.2. Normal form (4) with t = 2
In this case, whose eigenvalues are with geometric multiplicity 1. Writing for a nilpotent matrix of index 2, we have
[TABLE]
which implies that and Therefore
[TABLE]
is the eigenspace of associated with for all non-zero. Moreover, and for all The fixed-point subspaces of and approach the -invariant line as tends to infinity (see Figure 2). Here the two half-lines
[TABLE]
are components of
3.3.3. Normal form (4) with
When , the map has complex eigenvalues
[TABLE]
with Hence is diagonalizable over with where This means that there is a change of coordinates that conjugates to a rotation of radians around the origin. The complex eigenvectors associated to have the form where
[TABLE]
From now on we use coordinates in the basis of for which, taking , with , we have
[TABLE]
whence
[TABLE]
Hence the coordinates in the basis of the generators of and lie on a circle of center and radius 1 (see Figure 3). When , , , then and all the -orbits are periodic of period Also, is finite and their fixed-point subspaces form a finite set of lines through the origin. When is infinite and a set of generators of and of can be taken to form each a dense set in the circle, and hence the union of fixed-point subspaces is dense in the plane. In the original coordinates, there is a family of concentric -invariant ellipses and each -orbit is dense on the ellipse that contains it.
3.3.4. Normal form (4) with
When the map has real eigenvalues and , whereas for the eigenvalues of satisfy . Hence, is hyperbolic and for . The eigenvectors of associated to are generated by respectively. From now on we use coordinates in the basis of for which we have diagonal,
[TABLE]
Therefore,
[TABLE]
These fixed-point subspaces do not coincide with the eigenspaces of . Hence, powers of and map , into distinct subspaces, according to Theorem 2.8. Moreover, it follows that the ’s accumulate, when , on the expanding eigenspace of : if the ’s accumulate on the eigenspace of and for they accumulate on the eigenspace of (see Figure 4). Similarly, the subspaces ’s accumulate, when , on the contracting eigenspace of (the expanding eigenspace of ).
4. Dynamics and geometry of linear reversible maps for
In this section we obtain a generalization of the results of Section 3 for As we shall see, the planar case leads to a similar analysis of the dynamics of a germ of diffeomorphism on for where and are transversal linear involutions. Again, we denote by the group generated by the involutions and use the normal forms for the pairs of transversal linear involutions on now given in [5, Theorem 7.3]. There are five cases to consider:
- (a)
is Abelian; 2. (b)
is non-Abelian, and 3. (c)
is non-Abelian, and 4. (d)
is non-Abelian, and 5. (e)
is non-Abelian, and
We investigate the relation between the fixed-point subspaces of the involutions in and the dynamics generated by Let us denote by the vector with 1 in the -th coordinate and [math] elsewhere, for .
The following definition will be useful:
Definition 4.1**.**
The map-germ is a suspension of if where and . The pair is a suspension of if each is a suspension of in the same system of coordinates.
A consequence of the results of [5] is that a pair of linear transversal involutions is equivalent to a suspension of a pair of planar involutions, except in case (e), with , for which the pair is equivalent to a suspension of a pair of involutions in . The following trivial proposition summarises the properties of suspensions.
Proposition 4.2**.**
For linear involutions , if is a suspension of the involutions , with then:
- •
* is a suspension of ;*
- •
* and , integer, are suspensions of and respectively;*
- •
* and ;*
- •
The group of symmetries of consists of invertible matrices of the form
[TABLE]
where is a symmetry of , with and . A similar result holds for the set of reversing symmetries of .
Using [5, Theorem 7.3], the relation of cases (a)–(d) above to (i)–(iii) of the previous section is the following:
if is Abelian, then is equivalent to where is a suspension of the normal forms in Subsection 3.1;
if is non-Abelian, and , then is equivalent to where is a suspension of the normal forms in Subsection 3.2;
if is non-Abelian, and , then is equivalent to where is a suspension of the normal forms in Subsection 3.3 with ;
if is non-Abelian, and , then is equivalent to where is a suspension of the normal forms in Subsection 3.3 with .
All these cases satisfy the hypothesis of Theorem 2.13, i.e., and are hyperplanes.
In the next subsection we discuss the remaining case (e), which does not suspend from the planar problem.
4.1. Case (e): is non-Abelian, and
By [5, Theorem 7.3], is equivalent to where
In this case where
[TABLE]
is a nilpotent matrix of index 3. Therefore has eigenvalues with algebraic multiplicity and geometric multiplicity Since
[TABLE]
for each we have
[TABLE]
for all non-zero. Moreover,
[TABLE]
and
[TABLE]
for all For we have Thus, when , the fixed-point subspaces of and approach the -invariant subspace .
The subspaces and have codimension 1, so we can still apply Theorem 2.13. The situation is similar to the example of Subsection 3.3.2: the invariant limit hyperplane contains two connected components of
[TABLE]
Linear symmetries of have the form given in Proposition 4.2 and, where and with and , where is the 3-dimensional manifold of elements
[TABLE]
Linear reversing symmetries of have the same form, with , the 3-dimensional manifold of elements
[TABLE]
Acknowledgments
CAPES/FCT provided financial support under the grant 88887.125430/2016-00 for visits of the authors to the Universities of Porto and of São Paulo, whose hospitality is gratefully acknowledged. I.S.L. had partial financial support through CMUP (UIDB/00144/2020), which is funded by Fundação para a Ciência e a Tecnologia I.P. (Portugal).
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] P.H. Baptistelli, I.S. Labouriau and M. Manoel, Singular sets of folds and their associated involutions. In preparation, 2018.
- 2[2] P.H. Baptistelli, I.S. Labouriau and M. Manoel, Reversing symmetries in normally hyperbolic diffeomorphisms. In preparation, 2018.
- 3[3] R.L. Devaney, Reversible diffeomorphisms and flows, Trans. Am. Math. Soc. 218 , 89–113, 1976.
- 4[4] J.S.W. Lamb and M. Roberts, Time-reversal symmetry in dynamical systems: a survey, Physica D 112 1–39, 1998.
- 5[5] S. Mancini, M. Manoel and M.A. Teixeira, Divergent Diagrams of folds and simultaneous conjugacy of involutions, Discr. Cont. Dyn. Sys. 12 (4), 657–674, 2005.
- 6[6] S. Mancini, M. Manoel and M.A. Teixeira, Simultaneous linearization of a class of pairs of involutions with normally hyperbolic composition, Bull. Sci. Math. 137 (4), 418–433, 2013.
- 7[7] D. Montgomery and L. Zippin, Topological transformation groups , Interscience, New York, 1955.
- 8[8] M.A. Teixeira, On topological stability of divergent diagrams of folds. Math. Zeitschrift 180 382–390, 1981.