The extending surfaces of immersions into surfaces
Bojun Zhao
ABSTRACT: S. Blank solved the question of classifying immersed circles in R2 that extend to immersed disks, and how many topologically inequivalent disks can be extended. The quetions of various cases in 2-dimension have already been solved by generalizing his method. In this paper, we give a new way, which is straightforward for the questions, and we determine all topological equivalence classes of immersed surfaces bounded by an arbitrary immersed circle in a closed oriented surface.
Contents
-
1 Introduction
-
1.1 Notations
-
1.2 Main results
-
1.3 Organization
-
2 Preliminaries
-
2.1 Numbering
-
2.2 Gaussian circles
-
3 The cancellation operation
-
4 The construction of cancellations
-
4.1 trivalent graphs
-
4.2 Construction triple
-
4.3 The construction
-
5 Inscribed set
-
6 The proof of Theorem 1
-
7 Summary
-
8 Examples
-
9 Acknowledgments
1 Introduction
An immersion of a circle into a surface is normal if its image is in general position,
i.e. it has finitely many self-intersections and each self-intersection is a transverse double point (node).
In this paper,
we assume all immersions are smooth are oriented.
For an immersion f:S1→Σ (Σ is a surface),
we will always assume f is normal.
For an immersion g:S→Σ (S,Σ are surfaces),
we will always assume g∣∂S is normal.
Fix a surface Σ and an immersion f:S1→Σ.
We say that f extends to an immersion F:Σ0→Σ (Σ0 is a surface) if
F∣∂Σ0=f.
We will always assume the interior of Σ0 is mapped to the left of f(S1) by F.
Definition 1.1**.**
Let S and Σ be surfaces with ∂S=∅.
g1,g2:S→Σ are 2 immersions such that
g1∣∂S=g2∣∂S.
g1,g2 are (topologically) equivalent if there exists a diffeomorphism h:S→S
such that h∣∂S=id and g1=g2∘h (see [4]).
The questions are to classify the immersions that can be extended,
and to give the number of topologically inequivalent extensions they have (or, determine all topological equivalence classes of extensions).
To answer the questions,
we should solve both the existence problems and the equivalence problems (see [14]).
We list the questions:
Question 1**.**
Which immersed circles in R2 can be extended to immersed disks,
and in how many inequivalent ways?
(see [14])
Question 2**.**
Which immersed circles in R2 can be extended to immersed surfaces,
and in how many inequivalent ways?
(see [1])
Question 3**.**
Given a closed oriented surface Σ and a (homologically trivial) immersion f:S1→Σ.
(i) (H.Hopf and R.Thom) When does it extend to an immersed surface? (see [11])
(ii) Fix a nonnegative integer n,
how many inequivalent extension F are there such that
minp∈Σ#(F−1(p))=n?
The questions in 3-dimension are (samely, the problems ask the existence and equivalence both):
Question 4**.**
[9, Problem 3.19]
Which immersed 2-spheres in R3 bound immersed 3-balls?
(see [9])
Question 5**.**
Which immersed closed oriented surfaces in R3 bound immersed 3-manifolds (and in how many inequivalent ways)?
Question 1 was solved by S.Blank in his PhD thesis in 1967 ([2];
mentioned in [6],
[12]).
Before that,
C.Titus gave the answer of existence problem ([13]).
Blank proved a bijection between the set of topological equivalence classes of immersed disks bounded by an immersed circle in R2 and the set of groupings of a word given by the immmersed circle.
Blank’s techniques were generalized widely to deal with other cases.
K. Bailey solved Question 2 ([1]).
G.Francis solved some cases of Question 3 (ii) ([7]).
D. Frisch has claimed to solve Question 3 (ii) ([8]).
Question 3 (i) was solved by McIntyre (in the cases of 2-sphere and closed oriented surfaces of genus greater than 1) ([11]).
There are some other works related to these questions, for example, D.Calegari discussed the rationally bounding ([3]).
In this paper,
we develop a new way for Question 3 (ii),
which is also generalized to address Question 5 in the forthcoming paper.
We determine the topological equivalence classes of extensions (to surfaces) of an arbitrary immersed circle in a closed oriented surface.
Different from previous works dealing with different cases in many years,
our treatment is straightforward.
For a closed oriented surface Σ and a (homologically trivial) immersion f:S1→Σ,
fix a nonnegative integer n,
our main result is to prove a bijection between
{F∣F is a class of topologically equivalent extensions (to surface) of f, minp∈Σ#(F−1(p))=n} and a determined set (obtained by finite operations).
Apply to Question 2 (or Question 1),
our conclusion provides the immersed planar circle with a bijection between topological equivalence classes of extensions to surfaces (or disks) and a determined set (obtained by finite operations).
In the forthcoming paper,
we address Question 5.
For an immersion of a closed oriented surface into R3,
we prove a bijection between topological equivalence classes of extensions (to 3-manifolds) and a set obtained by finite operations.
1.1 Notations
In this paper,
a graph means a vertices-edges pair and together with a realization of topological space (an embedded graph).
If G is a graph,
v∈V(G),
degG(v) denotes the degree of v in G,
and we say v is a leaf of G if degG(v)=1.
Cutting off a set from the space means to delete the set from the space and do a path compactification.
Extensions of an immersed circle means maps of connected compact oriented surfaces with boundary equal to the immersed circle if not otherwise mentioned.
The equivalence classes of the extensions imply the topological equivalence classes of the extensions to surfaces if not otherwise mentioned.
A surface implies a connected surface if not otherwise mentioned.
1.2 Main results
We explain some basic ingredients first.
Let Σ be a surface and f:S1→Σ a homologically trivial immersion.
Assume {A1,…,An} is the set of the components of Σ∖f(S1).
ψ:{A1,…,An}→Z⩾0 is a normal numbering of f if: at each segment of f(S1),
the image of the component in its left is 1 greater than the image of the component in its right.
Actually,
if F:Σ0→Σ is an extension of f,
then there is a normal numbering ψF sending Ai to the cardinality of F−1(x) (∀x∈Ai), ∀i∈{1,2,…,n}.
We say ψF is the normal numbering given by F,
and F is related to ψF.
Fix a normal numbering ψ,
let Di(f,ψ) (0⩽i⩽maxψ)
be ⋃k∈{1,2,…,n},ψ(Ak)⩾iAk (where Ak is the closure of Ak).
More generally,
we can extend above definitions to the case of a homologically trivial immersion f:S1∐…∐S1→Σ.
The definitions basically follow from [8],
[10], [11].
Refer to [5],
g:M→N (M,N are compact oriented surfaces, M may be disconnected) is a polymersion (Definition 3.1)
if g is topologically equivalent to z↦zk (k∈Z⩾1) at each z in the interior of M,
and there exists an open set U (if ∂M=∅)
such that ∂M⊆U and
g∣U is an immersion.
Given a polymersion g:Σ0→Σ,
Σ0 is a compact orientable surface (Σ0 may disconnected) and Σ is a closed oriented surface.
The cancellation operation (Definition 3.5)
(g,Σ0)⇝(g1,Σ1)
(where Σ1 is a compact orientable surface that may be disconnected and
g1:Σ1→Σ a polymersion)
is a transformation defined by some cancellable domains (Definition 3.4)
A1,…,An⊆Σ0.
More precisely,
we delete A1∘,…,An∘ from Σ0 and identify the segments which have same images.
If the cancellation is regular (Definition 3.7 (ii)),
then it induces an embedded graph in Σ1.
Since the cancellation operation (g,Σ0)⇝(g1,Σ1) depends on the choice of cancellable domains,
we give a way to construct cancellable domains in 2 cases (see more contents in Subsection 4.3).
Case 1 yields an embedded graph G (Definition 4.1),
and G constructs the cancellable domains (Lemma 4.7).
Then G defines a cancellation (g,Σ0)⇝G(g1,Σ1).
Case 2 gives an embedded graph G′⊆Σ0
and yields an embedded graph G (Definition 4.3).
G and g(G′) constructs the cancellable domains (Lemma 4.10).
Then (G,g(G′)) defines a cancellation (g,Σ0)⇝(G,g(G′))(g1,Σ1).
More details are given in Section 4.
Fix an immersion f:S1→Σ (where Σ is a closed oriented surface) and ψ a normal numbering of f.
Given some embedded graphs under certain conditions,
we define a map to extend f,
which is a polymersion of a surface that may be disconnected.
This is called an inscribed map of (f,ψ) (Definition 5.1).
We consider a collection of sets of (embedded) graphs to establish the inscribed maps to be immersions of connected surfaces (then they are extensions of f),
and such that different sets establish inequivalent extensions of f.
An inscribed set ζ is a finite set obtained by f and ψ.
∀{(H~1,H1),…,(H~n,Hn)}∈ζ,
{(H~1,H1), …,(H~n,Hn)} is called good if H1=∅,
and we denote by I(ζ) the set of good elements of ζ.
∀{(H~1,H1),…,(H~n,Hn)}∈I(ζ),
H2,…,Hn establish an inscribed map (said to be an inscribed map related to {(H~1,H1),…,(H~n,Hn)}),
and we can verify that such inscribed maps are extensions of f.
We develop a map i:I(ζ)→E(f,ψ) (where E(f,ψ) is the set of equivalence classes of extensions of f related to ψ) sending each X∈I(ζ) to the equivalence class of the inscribed map of (f,ψ) related to X.
Lemma 6.1 proves
the inscribed maps related to different elements of I(ζ) are inequivalent,
hence i:I(ζ)→E(f,ψ) is injective.
Proposition 6.2 proves
an arbitrary extension g:Σ0→Σ of f is an inscribed map related to an element {(H~1,H1),…,(H~n,Hn)}∈I(ζ),
hence i:I(ζ)→E(f,ψ) is surjective.
We prove this
by providing g with a sequence of cancellation operations
(g,Σ0)⇝H~n(gn,Σn)⇝(H~n−1,Hn)(gn−1,Σn−1)⇝(H~n−2,Hn−1)…⇝(H~1,H2)(g1,Σ1),
where g1 is an embedding.
As a result,
we establsh i:I(ζ)→E(f,ψ),
the bijection between I(ζ) and the set of equivalence classes of extensions of f related to ψ:
Theorem 1**.**
For a closed oriented surface Σ,
let f:S1→Σ be a homologically trivial immersion
and ψ a normal numbering of f.
Fix ζ an inscribed set of (f,ψ).
Then there is a bijection between I(ζ) and the set of equivalence classes of extensions of f related to ψ
1.3 Organization
Section 2 gives basic ingredients.
Section 3 introduces the cancellation operation (g,Σ0)⇝(g1,Σ1),
and Section 4 provides the ways to yield a graph G and construct the cancellable domains,
then determine the cancellation operation
(g,Σ0)⇝G(g1,Σ1) (Case 1) or (g,Σ0)⇝(G,g(G′))(g1,Σ1) (Case 2).
Section 5 defines inscribed maps,
and introduces the inscribed set ζ and I(ζ)⊆ζ.
Section 6 proves the Theorem 1.
Section 7 summaries of the general cases.
Section 8 provides some examples.
2 Preliminaries
This section is to introduce the basic ingredients:
Numberings (Definition 2.1)
and Gaussian circles (Definition 2.3).
2.1 Numbering
Fix a surface Σ and an immersion f:S1→Σ.
If there exists an extension F:Σ0→Σ,
then f(S1) is homologically trivial.
In [11, Section 1]
the numbering of preimages of points in Σ∖f(S1) satisfies:
at every segment of the immersed circle,
the number to its left is 1 greater than the number to its right.
Definition 2.1** (Numbering).**
For a closed oriented surface Σ,
let f:S1→Σ be a homologically trivial immersion.
Assume {A1,…,An} is the set of the components of Σ∖f(S1).
ψ:{A1,…,An}→Z is a numbering if:
at every segment of f(S1),
the image of the component in its left is 1 greater than the image of the component in its right.
A numbering is normal if its range is a subset of Z⩾0.
The name “normal numbering” follows from [8, Definition 1.2.1].
Lemma 2.2**.**
For a closed oriented surface Σ,
let f:S1→Σ be a homologically trivial immersion.
The (normal) numberings of f exist uniquely up to choose its minimum image to be a (nonnegative) integer constant.
Proof.
Basically follows from [10, Lemma 2].
∎
Fix F:Σ0→Σ an extension of f.
There exists a normal numbering ψF:{A1,…,An}→Z⩾0
sending Ai to the cardinality of F−1(x) (∀x∈Ai), ∀i∈{1,2,…,n}.
We say F is related to ψF,
and ψF is the normal numbering given by F.
The extensions related to different normal numberings are inequivalent ([8, Lemma 5.3.2]).
If Σ is a 2-sphere or a closed oriented surface of genus greater than one,
[11] showed the maximum image of ψF has an upper bound if f a filling immersed curve,
and solved Question 3 (i) (the existence problem) in these cases.
More genreally,
we can extend the numbering to the cases of Σ=R2 or Σ is a compact orientable surface with nonempty boundary.
Note that arbitrary extensions of f (if exist) are related to a unique normal numbering ψf in these cases (if Σ=R2, ψf sends the components of R2∖f(S1) to winding numbers).
Also,
we can extend the numbering to the case of a homologically trivial immersion f:S1∐…∐S1→Σ ([8, Lemma 1.2.5]).
The topology type of an immersed surface bounded by the immersed circle is determined by the normal numbering given by it (note that some changes need to be adopted for 3-dimensional cases).
This basically follows from [11, Lemma 3].
In the remainder of this paper,
we state with fixing a normal numbering of the immersed circle,
and we will not discuss the topology types specially.
2.2 Gaussian circles
Definition 2.3** (Gaussian circles).**
For a closed oriented surface Σ,
let f:S1→Σ be a homologically trivial immersion
and ψ a normal numbering of f.
Let n=maxψ,
m=minψ.
(i)
Assume {A1,…,An} is the set of the components of Σ∖f(S1).
Let Di(f,ψ) be the closure of ⋃k∈{1,2,…,n},ψ(Ak)⩾iAk,
∀i∈{1,2,…,n}.
(ii)
∀i∈{m,m+1,…,n},
each component of ∂Di(f,ψ) is an embedded circle.
Call these circles the Gaussian circles of f.
(iii)
Let Vi(f,ψ)=∂Di(f,ψ)∩∂Di−1(f,ψ),
∀m+1⩽i⩽n,
and V1(f,ψ)=…=Vm(f,ψ)=∅.
A Gaussian circle is composed of segments of f(S1) piecewise,
and ⋃i=m+1nVi(f,ψ) is the set of nodes in f(S1).
Similar to the numbering,
we can extend Definition 2.3 to the case of a homologically trivial immersion f:S1∐…∐S1→Σ.
In [11],
Di(f,ψ) is denoted by Si. The definition of Gaussian circles basically follows from [5, Section 2].
Note that our definition differs a little from [5, Section 2]:
Remark 2.4**.**
In [5],
Gaussian circles are some disjoint embedded circles obtained by separating and smoothing the self-intersections of the immersed circle.
But we allow them to intersect at nodes.
3 The cancellation operation
This section is to
introduce an operation to transform a polymersion (Definition 3.1) of a surface into a surface.
The intention is to simplify the polymersion.
More precisely, given some cancellable domains (Definition 3.4),
the cancellation operation (Definition 3.5 (ii)) transforms the polymersion by deleting their interior and identifying the segments with same images.
This gives an associated map (an embedding of a graph) if the cancellation is regular (Definition 3.7).
Figure 2 provides an example of the cancellation operation.
Definition 3.1 and Remark 3.2 basically follow from [5, Section 1].
Definition 3.1**.**
Let M,N be compact orientable surfaces (M may be disconnected).
g:M→N is a polymersion if:
∙
At each z∈M∘ (where M∘ means the interior of M),
g is topologically equivalent to z↦zk (k∈Z⩾1).
∙
If ∂M=∅,
then there exists an open set U such that
∂M⊆U
and g∣U is an immersion.
Similar to immersions,
we will always assume a polymersion g:M→N such that the interior of M is mapped to the left side of g(∂M) by g and assume g∣∂M is a normal immersion,
if ∂M=∅.
Remark 3.2**.**
For a polymersion g:M→N,
a point z∈M∘ of local form z↦zn (n⩾2) is called a critical point of multiplicity n−1,
and its image is called a branch point.
In this paper,
if M,N are compact orientable surfaces (M may be disconnected) and g:M→N is a polymersion,
we will always assume
there is no branch point in g(∂M),
and assume different critical points of g have different images if not otherwise mentioned.
The index of a branch point is the multiplicity of the critical point mapped to it.
Recall that Definition 2.3 can be extended to the case of a homologically trivial immersion f:S1∐…∐S1→Σ,
and Dmaxψ(g(∂Σ0),ψ) is independent of the normal numbering ψ.
Definition 3.3**.**
For a closed oriented surface Σ
and a compact orientable surface Σ0 (Σ0 may be disconnected),
let g:Σ0→Σ be a polymersion.
Let R(g) be Dmaxψ(g(∂Σ0),ψ) (ψ is an arbitrary normal numbering) if ∂Σ0=∅,
and R(g)=Σ if ∂Σ0=∅.
Note that R(g) lies in the left of each segment in ∂R(g)⊆g(∂Σ0).
Definition 3.4** (Cancellable domains).**
For a closed oriented surface Σ
and a compact orientable surface Σ0 (Σ0 may be disconnected),
let g:Σ0→Σ be a polymersion.
Assume A1,A2,…,An⊆Σ0 are closed domains such that
A1∘,A2∘,…,An∘ are homeomorphically embedded into R(g) by g.
A1,A2,…,An are called cancellable if:
∙
There exists an embedded graph G⊆R(g) such that G∩∂R(g)={v∣v∈V(G),degG(v)=1},
and
{g(A1∘),g(A2∘),…,g(An∘)}
is the set of the components of R(g)∖G.
(G is called the graph associated to A1,A2,…,An)
∙
(g∣Ai)−1(g(Ai)∩∂R(g))⊆∂Σ0 if g(Ai)∩∂R(g)=∅,
∀i∈{1,2,…,n}.
Definition 3.5** (Cancellation operation).**
For a closed oriented surface Σ
and a compact orientable surface Σ0 (Σ0 may be disconnected),
let g:Σ0→Σ be a polymersion.
Assume that the closed domains A1,A2,…,An⊆Σ0 are cancellable.
The cancellation of {A1,A2,…,An} (or, canceling {A1,A2,…,An})
(g,Σ0)⇝(g1,Σ1)
is the following procedure:
∙
Let Σ0′ be Σ0∖(A1∪A2∪…∪An).
g0=g∣Σ0′.
Let h be the equivalence relation such that
x∼hy if
x,y∈∂Σ0′∩g0−1(G),g0(x)=g0(y).
Let Σ1 be the identification space Σ0′/∼h.
Let h∗:Σ0′→Σ1 be the identification map induced by h.
Let g1:Σ1→Σ be the map given by following commutative diagram.
\textstyle{\Sigma^{{}^{\prime}}_{0}\ignorespaces\ignorespaces\ignorespaces\ignorespaces\ignorespaces\ignorespaces\ignorespaces\ignorespaces}$$\scriptstyle{h_{*}}$$\scriptstyle{g_{0}}$$\textstyle{\Sigma\ignorespaces\ignorespaces\ignorespaces\ignorespaces}$$\scriptstyle{id}$$\textstyle{\Sigma_{1}\ignorespaces\ignorespaces\ignorespaces\ignorespaces}$$\scriptstyle{g_{1}}$$\textstyle{\Sigma}
Then (g,Σ0)⇝(g1,Σ1) has defined.
The identification map h∗ is called the cancellation map of A1,A2,…,An.
The cancellation (g,Σ0)⇝(g1,Σ1) is depend on the choice of cancellable domains A1,A2,…,An.
In Section 4,
we determine the cancellation by a graph G or a pair of graphs (G,g(G′)),
and denote it by (g,Σ0)⇝G(g1,Σ1)
or (g,Σ0)⇝(G,g(G′))(g1,Σ1).
Lemma 3.6**.**
The identification space Σ1 is a compact orientable surface that may be disconnected,
and the map g1:Σ1→Σ is a polymersion.
For each s∈E(G),
there are 2 arcs in ∐i=1n∂Ai mapped homeomorphically to s by g,
and they may be the same arc in Σ0.
g(∂(A1∪A2∪…∪An))∩G is the subgraph of G consisting of
all s∈E(G) that have 2 different preimages in A1∪A2∪…∪An (Figure 3).
Definition 3.7**.**
For a closed oriented surface Σ
and a compact orientable surface Σ0 (Σ0 may be disconnected),
let g:Σ0→Σ be a polymersion.
Assume that the closed domains A1,A2,…,An⊆Σ0 are cancellable.
(i)
Let G(A1,A2,…,An)=g(∂(A1∪A2∪…∪An))∩G.
(ii)
Let h∗:Σ0′→Σ1 be the cancellation map of A1,A2,…,An (Σ0′=Σ0∖(A1∪A2∪…∪An)).
The cancellation of A1,A2,…,An is called regular
if #(h∗(∂Σ0′∩g∗−1(x)))=1,
∀x∈V(G(A1,A2,…,An)).
If the cancellation of A1,A2,…,An is regular,
then #(h∗(∂Σ0′∩g∗−1(x)))=1,∀x∈G(A1,A2,…,An).
So there is a map T:G(A1,A2,…,An)→Σ1 such that
{T(x)}=h∗(∂Σ0′∩g∗−1(x)),
∀x∈G(A1,A2,…,An).
Note that the image of G(A1,A2,…,An)∩∂R(g) under T lies in ∂Σ1.
Call T the associated map of canceling {A1,A2,…,An}.
4 The construction of cancellations
In last section,
we define the cancellation operation,
which depends on the choice of cancellable domains (Definition 3.4).
Given g:Σ0→Σ a polymersion,
this section is mainly concerned with constructing cancellable domains.
More precisely,
g yields an embedded graph G⊆R(g),
and G determine the cancellable domains in Σ0.
Then the cancellation operation (g,Σ0)⇝G(g1,Σ1) (in Case 1) or (g,Σ0)⇝(G,g(G′))(g1,Σ1) (in Case 2, where G′⊆Σ0 is given in Case 2) is constructed.
Subsection 4.1 gives the way to yield an embedded graph in a union of closed regions.
Subsection 4.2 introduces the construction triple (Definition 4.5) to construct cancellable domains,
and Subsection 4.3 constructs cancellable domains by yielding an embedded graph and choosing a construction triple.
4.1 trivalent graphs
We define some embedded graphs generated in a union of closed regions.
Such graphs are used to construct cancellable domains in Subsection 4.3.
Definition 4.1**.**
Let A be a union of compact orientable surfaces with nonempty boundaries.
Let P⊆∂A be a finite set of points
(may be ∅).
(i)
(A,P) is appropriate if:
A has no component A0
such that
A0 is a disk
and #(A0∩P)=1.
(ii)
Assume (A,P) is appropriate.
An embedded graph G⊆A is an (A,P)-trivalent graph if:
Each vertex of G has degree no more than 3,
P={v∣v∈V(G),degG(v)=1},
and the following holds for each component A0 of A:
∙
If A0 is not a disk or #(A0∩P)⩾2,
then
⋃e∈E(G),e⊆A0,e∩P=∅e is a deformation retract of A0.
∙
If A0 is a disk and A0∩P=∅,
then A0∩G=∅.
Definition 4.2**.**
Let X be a graph whose vertices have degree no more than 3.
Assume Y is a subgraph of X such that arbitrary vertices of Y have degree no less than 1.
Y is called a good subgraph of X if
{v∣v∈V(X),degX(v)=1}={v∣v∈V(Y),degY(v)=1}.
We denote the set of all good subgraphs of X by sub(X).
Definition 4.3**.**
Let Σ be a closed oriented surface,
A⊆Σ is a union of closed regions (A may be Σ).
Let G0⊆A be an embedded graph such that
the vertices have degree no more than 3,
and G0∩∂A={v∣v∈V(G0),degG0(v)=1}.
Let P⊆(∂A∖G0)∪{v∣v∈V(G0),degG0(v)=3} be a finite set of points.
(i)
Let a1, a2, …, am
be the components obtained by
cutting off G0 from A (which means to delete G0 from A and do a path compactification).
For each k∈{1,2,…,m},
let ik:ak→A be the continuous map such that
the restriction of ik to ak∘ is an inclusion,
and let Pk={x∣x∈∂ak,ik(x)∈P}.
(A,G0,P) is called appropriate if
(ak,Pk) is appropriate,
∀k∈{1,2,…,m}.
(ii)
Assume (A,G0,P) is appropriate.
G⊆A is called a thin (A,G0,P)-trivalent graph if:
there exists Gk⊆ak an (ak,Pk)-trivalent graph
for each k∈{1,2,…,m},
such that G=⋃k=1mik(Gk).
(iii)
Let H be a subgraph of G.
We cut off G0∩G from G, and obtain G′.
H is a G0-good subgraph of G if:
for each component L of G′,
H∩L is a good subgraph of L.
We denote by subG0(G) the set of G0-good subgraphs of G.
For our convenience,
we give the following generalizations:
Remark 4.4**.**
We include the case G0=∅ if A=Σ.
In this case,
P⊆∂A,
(A,G0,P) is appropriate if and only if (A,P) is appropriate,
and a thin (A,G0,P)-trivalent graph is a (A,P)-trivalent graph.
Moreover,
subG0(G)=sub(G).
4.2 Construction triple
We consider a triple to construct cancellable domains.
Recall that R(g)=Dmaxψ(g(∂Σ0),ψ) for an arbitrary normal numbering ψ (Definition 3.3).
Definition 4.5**.**
For a closed oriented surface Σ
and a compact orientable surface Σ0 (Σ0 may disconnected),
let g:Σ0→Σ be a polymersion.
(i)
The construction triple ({p1,p2,…,pn},G,{p~1,p~2,…,p~n}) is given by:
∙
p1,p2,…,pn∈R(g) are some points.
∙
G⊆R(g) is a graph such that G∩∂R(g) is the set of leaves in G,
and each component of R(g)∖G includes one element of {p1,p2,…,pn} exactly.
∙
p~1,p~2,…,p~n∈Σ0,
p~k∈g−1(pk),∀k∈{1,2,…,n}.
(ii)
A construction triple
({p1,p2,…,pn},G,{p~1,p~2,…,p~n}) is suitable if there exist
closed domains A1,A2,…,An⊆Σ0 such that:
∙
A1∘,A2∘,…,An∘ are
homeomorphically embedded into Σ by g,
and {g(A1∘),g(A2∘),…,g(An∘)}
is the set of the components of R(g)∖G.
∙
p~k∈Ak,
∀k∈{1,2,…,n}.
∙
A1,A2,…,An are cancellable.
Moreover,
in the case of (ii),
A1,A2,…,An are said to be the cancellable domains given by ({p1,p2,…,pn},G,{p~1,p~2, …,p~n}).
4.3 The construction
Let Σ0 be a compact orientable surface (Σ0 may disconnected) and Σ a closed oriented surface.
Let g:Σ0→Σ be a polymersion.
This subsection is to construct cancellable domains in following two cases.
Case 1**.**
∂Σ0=∅ (then ∂R(g)=∅),
and there is no branch point in R(g).
Let N be the set of nodes of g(∂Σ0) in ∂R(g)⊆g(∂Σ0).
Lemma 4.6**.**
(R(g),N)* is appropriate.*
Proof.
If not,
then there exists a component D0⊆R(g),
D0 is a disk and #(N∩D0)=1.
Assume without loss of generality that N∩D0={p}.
Let D0′ be the component of g−1(D0) such that (g∣∂Σ0)−1(∂D∖{p})⊆D0′,
then D0′ includes 2 different preimages of p.
This contradicts to D0 is a disk (D0′ must be mapped homeomorphically to D0 by g).
So (R(g),N) is appropriate.
∎
Lemma 4.7**.**
Assume p1,p2,…,pn∈∂R(g)∖N are n points such that
each component of ∂R(g)∖N includes one of them exactly.
{p~k}=g−1(pk)∩∂Σ0,∀k∈{1,2,…,n}.
Assume G is an arbitrary (R(g),N)-trivalent graph.
Then the construction triple ({p1,p2,…,pn},G,{p~1,p~2,…,p~n})
is suitable,
and the cancellable domains given by it are independent of the choice of p1,p2,…,pn,p~1,p~2,…,p~n.
Proof.
Fix k∈{1,2,…,n}.
Let Bk be the component of R(g)∖G containing pk.
Let B~k be the component of g−1(Bk) containing p~k.
First,
we prove that B~k is mapped homeomorphically to Bk by g.
Assume R0 is the component of R(g) containing Bk.
If R0 is a disk and N∩R0=∅,
then Bk=R0,
and each component of g−1(Bk) is mapped homeomorphically to Bk by g.
If R0 is not a disk or N∩R0=∅,
assume lk is the component of ∂R(g)∖N such that lk⊆Bk,
then Bk⋍lk.
Let l~k=g−1(lk)∩∂Σ0,
then l~k⊆B~k,
and l~k is mapped homeomorphically to lk by g.
Hence B~k is mapped homeomorphically to Bk by g.
Easily,
B~1,…,B~n are cancellable,
and they are independent of the choice of p1,p2,…,pn,p~1,p~2, …,p~n.
∎
With above conditions,
the cancellable domains given by ({p1,p2,…,pn},G,{p~1,p~2,…,p~n})
(which are determined by G)
are called the G-cancellable domains.
Hence G defines a cancellation (g,Σ0)⇝G(g1,Σ1)
(the cancellation is determined uniquely by G).
Lemma 4.8**.**
Assume A1,A2,…,An are the G-cancellable domains, then G(A1,A2,…,An)∈sub(G) (where G(A1,A2,…,An) is defined in Definition 3.7 (i)).
Next,
we consider the other case.
Case 2**.**
In this case,
∂Σ0 may be ∅ (R(g)=Σ if ∂Σ0=∅).
There is an embedded graph G′⊆Σ0 such that (i) ∼ (v) hold:
(i)
The vertices of G′ have degree no more than 3.
(ii)
G′ is homeomorphically embedded into R(g) by g.
(iii)
The leaves of G′ are in ∂Σ0.
(iv)
Each critical point in Σ0 mapped into R(g) is a vertex of G′ with degree 3.
(v)
For each branch point y∈R(g),
assume a,b,c are the 3 edges of g(G′) at y clockwise.
Let x∈Σ0 such that {x}=g−1(y)∩G′ (then x is a critical point)
and a′,b′,c′ the 3 edges of G′ at x mapped to a,b,c.
Then they are in the order a′,c′,b′ clockwise around x.
Let N be the union of the branch points in D and the nodes of g(∂Σ0) in ∂Dg⊆g(Σ0).
Lemma 4.9**.**
(R(g),g(G′),N)* is appropriate.*
Proof.
See the proof of Lemma 4.6.
∎
Lemma 4.10**.**
Assume p1,p2,…,pn∈(g(G′)∪∂R(g))∖N are n points such that
each component of (g(G′)∪∂R(g))∖N includes one of them exactly.
{p~k}=g−1(pk)∩(∂Σ0∪G′),∀k∈{1,2,…,n}.
Assume G is an arbitrary (R(g),g(G′),N)-thin trivalent graph.
Then the construction triple ({p1,p2,…,pn},G, {p~1,p~2,…,p~n})
is suitable,
and the cancellable domains given by it are
independent of the choice of p1,p2,…,pn,p~1,p~2,…,p~n.
Proof.
Fix k∈{1,2,…,n}.
Let Bk be the component of R(g)∖G containing pk.
Let B~k be the component of g−1(Bk) containing p~k.
First,
we prove that B~k is mapped homeomorphically to Bk by g.
Assume lk is the component of (g(G′)∪∂R(g))∖N such that
lk⊆Bk.
Let l~k=g−1(lk)∩(∂Σ0∪G′),
then l~k⊆B~k.
We cut off g(G′)∩Bk from Bk and obtain Bk′.
Similar to the proof of Lemma 4.7,
for each component B0 of Bk′,
if B~0 is the component of g−1(B0) such that B~0⊆B~k,
then B~0 is mapped homeomorphically to B0 by g.
Easily,
B~1,…,B~n are cancellable,
and they are independent of the choice of p1,p2,…,pn,p~1,p~2, …,p~n.
∎
With above conditions,
the cancellable domains given by
({p1,p2,…,pn},G,{p~1,p~2,…,p~n})
(which are determined by G)
are called
the (G,g(G′))-cancellable domains.
Hence G and g(G′) define a cancellation (g,Σ0)⇝(G,g(G′))(g1,Σ1).
Moreover,
the cancellation is determined uniquely by G and g(G′) (G′ is determined uniquely by g(G′), since (v) of Case 2).
Lemma 4.11**.**
Assume A1,A2,…,An are (G,g(G′))-cancellable domains, then G(A1,A2,…,An)∈subg(G′)(G).
5 Inscribed set
This section introduces a way to realize the extensions of an immersed circle in the surfaces.
Fix an immersed circle in the surface and a normal numbering ψ of it,
inscribed maps (Definition 5.1) are maps established by some graphs under certain conditions.
We define an inscribed set ζ (Definition 5.2)
and I(ζ)⊆ζ (Definition 5.4).
The elements of I(ζ) can be realized to extensions of the immersed circle by inscribed maps (Lemma 5.5).
Definition 5.1** (Inscribed map).**
For a closed oriented surface Σ,
let f:S1→Σ be a homologically trivial immersion.
Let ψ be a normal numbering of f.
Let n=maxψ.
Let G2⊆D2(f,ψ),G3⊆D3(f,ψ),…,Gn⊆Dn(f,ψ) be embedded graphs such that Vk(f,ψ)=Gk∩∂Dk(f,ψ)={v∣degGk(v)=1},
and Gk∩Gk−1=V(Gk)∩V(Gk−1), ∀k∈{2,3,…,n} (G1=∅).
Assume gk:Dk→Σ is an embedding such that gk(Dk)=Dk(f,ψ), ∀k∈{1,2,…,n}.
There are graphs Ak,Bk⊆Dk such that
gk(Ak)=Gk,gk(Bk)=Gk+1,
and ak:(V(Ak),E(Ak))→(V(Gk),E(Gk)), bk:(V(Bk),E(Bk))→(V(Gk+1),E(Gk+1)) are isomorphisms induced by gk,
∀k∈{1,2,…,n} (Gn+1=∅).
Let F=∐k=1nDk
and g:F→Σ a map such that g∣Dk=gk,∀k∈{1,2,…,n}.
We obtain a map by following procedure:
We cut off (which means to delete the set from the space and do a path compactification) (⋃k=2nAk)∪(⋃k=1n−1Bk) from F,
and obtain an identification space F0.
g0:F0→Σ is induced by g:F→Σ.
For all k∈{2,…,n} and e∈E(Gk),
ak−1(e) is cut off in Dk
and becomes 2 copies e1+ (in the left) and e1− (in the right),
bk−1−1(e) is cut off in Dk−1
and becomes e2+ (in the left) and e2− (in the right).
Let h be the equivalence relation such that x∼hy if
x∈e1+,y∈e2−,g0(x)=g0(y) or x∈e2+,y∈e1−,g0(x)=g0(y),
∀e∈⋃k=2nE(Gk).
Let F1=F0/∼h,
and g1:F1→Σ be induced by g.
g1 is called an inscribed map of (f,ψ)
associated to {G2,…,Gn}.
Actually,
the inscribed map g1:F1→Σ is a polymersion (but we can’t ensure it’s different critical points mapped to different branch points).
F1 is a surface that may be disconnected,
and g1∣∂F1=f.
We construct the sets of graphs whose inscribed maps are immersions of connected surfaces in the remainder of this subsection.
Definition 5.2** (Inscribed set).**
For a closed oriented surface Σ,
let f:S1→Σ be a homologically trivial immersion
and ψ a normal numbering of f.
Let n=maxψ.
The following process is to obtain
an inscribed set ζ1 and the kth-inscribed set ζk (2⩽k⩽n):
We induce decreasingly on k.
For k=n:
if (Dn(f,ψ),Vn(f,ψ)) is appropriate,
then there exists H~n a (Dn(f,ψ),Vn(f,ψ))-trivalent graph.
Set ζn={(H~n,Hn)∣Hn∈sub(H~n)}.
If (Dn(f,ψ),Vn(f,ψ)) is not appropriate,
then we set ζn=∅.
Now assume we have defined ζn,ζn−1,…,ζk+1 after n−k steps,
1⩽k⩽n−1.
For step n−k+1:
if ζk+1=∅,
set ζk=∅.
If ζk+1=∅,
then ζk is obtained as follows:
for each ={(H~k+1,Hk+1),…,(H~n,Hn)}∈ζk+1,
let Nj={x∣x∈V(Hj),deg(x)=3}∖Nj+1,
∀k+1⩽j⩽n (Nn+1=∅).
Then:
∙
If (Dk(f,ψ),Hk+1,Nk+1∪Vk(f,ψ)) is appropriate,
set H~k to be a thin (Dk(f,ψ),Hk+1,Nk+1∪Vk(f,ψ))-trivalent graph.
Let
Q({(H~k+1,Hk+1),…,(H~n,Hn)})={(H~k,Hk)∣Hk∈subHk+1(H~k)}.
∙
If (Dk(f,ψ),Hk+1,Nk+1∪Vk(f,ψ)) is not appropriate,
set Q({(H~k+1,Hk+1),…,(H~n,Hn)})=∅.
Set ζk=⋃X∈ζk+1,Q(X)=∅⋃Y∈Q(X)(X∪Y).
Remark 5.3**.**
For simplicity,
we will always denote an inscribed set by ζ instead of ζ1,
and denote by ζk the kth-inscribed set obtained by the procedure to obtain ζ (determined by ζ uniquely),
∀k∈{2,3,…,n}.
Definition 5.4**.**
For a closed oriented surface Σ,
let f:S1→Σ be a homologically trivial immersion
and ψ a normal numbering of f.
Let ζ be an inscribed set of (f,ψ).
An element {(H~1,H1),…,(H~n,Hn)}∈ζ is good
if H1=∅,
and H2,H3,…,Hn=∅ (when n⩾1).
Let I(ζ)={X∣X∈ζ,X is good}.
For each {(H~1,H1),…,(H~n,Hn)}∈I(ζ),
we can verify that
g:S→Σ is an inscribed map of f associated to H2,…,Hn
if and only if
there exists a sequence of cancellation operations
(g,S)⇝H~n(gn,Sn)⇝(H~n−1,Hn)(gn−1,Sn−1)⇝(H~n−2,Hn−1)…⇝(H~1,H2)(g1,S1)
(where (gk,Sk)⇝(H~k−1,Hk)(gk−1,Sk−1) is the cancellation of (H~k−1,Hk)-cancellable domains in gk,
and g1 is an embedding).
Lemma 5.5**.**
If {(H~1,H1),…,(H~n,Hn)}∈I(ζ),
g:S→Σ is an inscirbed map of (f,ψ) associated to {H2,…,Hn},
then g is an immersion.
Moreover,
g is an extension of f related to ψ (which means S is a connected surface).
Proof.
We only prove that S is a connected surface.
Let h be the equivalence class consistent with Definition 5.1
and h∗:F0→F1 the identification map (h∗ is surjective).
We denote by Dk′⊆F0 the space obtained by cutting off Ak∪Bk from Dk,
∀k∈{1,2,…,n}.
Assume X is a component of Dk(f,ψ)∖(Hk∪Hk+1),
k∈{1,2,…,n} (Hn+1=∅),
then X∩(Hk+1∪∂Dk(f,ψ))=∅.
So for each x∈Dk′,
h∗(x) is connected to a point in h∗(Dk+1′)∪∂S,
k∈{1,2,…,n} (Dn+1′=∅).
Hence each point in h∗(F0)=F1 is connected to ∂S.
So S is connected, since ∂S has exactly one boundary component.
∎
g is said to be an inscribed map of (f,ψ) to realize {(H~1,H1),…,(H~n,Hn)},
or an inscribed map of (f,ψ) related to {(H~1,H1),…,(H~n,Hn)}.
Moreover,
Lemma 5.5 defines a map from I(ζ) to the set of equivalence classes of extensions of f related to ψ.
6 The proof of Theorem 1
We prove Theorem 1 in this section.
Given a closed oriented surface Σ and an immersion f:S1→Σ.
Let ψ be a normal numbering of f
and ζ an inscribed set of (f,ζ).
Let E(f,ψ) be the set of equivalence classes of extensions of f related to ψ.
Lemma 5.5 provides a map i:I(ζ)→E(f,ψ) sending each X∈I(ζ) to the equivalence class of the inscribed map of (f,ψ) related to X.
We prove i:I(ζ)→E(f,ψ) is a bijection in this section.
Lemma 6.1 proves i:I(ζ)→E(f,ψ) is injective,
and Proposition 6.2 proves i:I(ζ)→E(f,ψ) is surjective.
Lemma 5.5 and Proposition 6.2
conclude i:I(ζ)→E(f,ψ) is a bijection,
hence Theorem 1 is proved.
Lemma 6.1**.**
For a closed oriented surface Σ,
let f:S1→Σ be a homologically trivial immersion
and ψ a normal numbering of f.
Assume n=maxψ.
If ζ is an inscribed set of (f,ψ),
and g1,g2:S→Σ are two inscribed map of (f,ψ) related to two different elements of I(ζ),
then g1,g2 are inequivalent.
Proof.
Suppose g1 is related to {(H~1,H1),…,(H~n,Hn)}∈I(ζ),
g2 is related to {(G~1,G1),…,(G~n,Gn)}∈I(ζ).
Then {(H~1,H1),…,(H~n,Hn)}={(G~1,G1),…,(G~n,Gn)}.
There exists k∈{2,3,…,n}
such that Hk=Gk and Hi=Gi, ∀k+1⩽i⩽n.
So H~k=G~k.
There exists e0∈E(H~k),
e0 is in exactly one of E(Hk),E(Gk).
Assume without loss of generality that e0∈E(Hk),e0∈/E(Gk).
For each e∈E(Hi)⊆E(Hi~), ∀i∈{2,…,n},
we denote by D+(e) (respectively D−(e)) the closure of the component of Di(f,ψ)∖(Hi~∪Hi+1) which lie in the left side (respectively the right side) of e.
Then ∂D+(e)∩(Hi+1∪∂Di(f,ψ)),∂D−(e)∩(Hi+1∪∂Di(f,ψ))=∅.
Choose s∈e0.
There exist m∈{k,k+1,…,n} and p1∈∂Dm(f,ψ)∖Vm(f,ψ),
such that ∃a0=e0,a1∈E(Hk+1),a2∈E(Hk+2),…,am−k∈E(Hm),am−k+1={p1},
ai+1⊆D+(ai),∀i∈{0,1,2,…,m−k}.
Let h1:[0,1]→Σ be an immersion such that
h1(0)=s,h1(1)=p1,
and ∃0=t0<t1<t2<…<tm−k<tm−k+1=1 such that
h1(ti)∈ai,
and [ti,ti+1] is homeomorphically embedded into D+(ai) by h1,
∀i∈{0,1,…,m−k}.
Similarly, there exist q∈{k,k+1,…,n} and p2∈∂Dq(f,ψ)∖Vq(f,ψ),
such that ∃b0=e0,b1∈E(Hk+1),b2∈E(Hk+2),…,bq−k∈E(Hq),bq−k+1={p2},
bi+1⊆D−(bi),∀i∈{0,1,2,…,q−k}.
And let h2:[0,1]→Σ be an immersion such that
h2(0)=s,h2(1)=p2,
and ∃0=j0<j1<j2<…<jq−k<jq−k+1=1 such that
h2(ji)∈bi,
and [ji,ji+1] is homeomorphically embedded into D−(bi) by h2,
∀i∈{0,1,…,q−k}.
Since g1,g2 are the inscribed maps related to {(H~1,H1),…,(H~n,Hn)} and {(G~1,G1),…,(G~n,Gn)},
there exsit embeddings h~1,h~2:[0,1]→S such that g1∘h~1=g2∘h~2=h1,
{h~1(1)}={h~2(1)}=∂S∩g1−1(p1),
and there exist embeddings h~3,h~4:[0,1]→S such that g1∘h~3=g2∘h~4=h2,
{h~3(1)}={h~4(1)}=∂S∩g1−1(p2).
Since e0∈E(Hk) and e0∈/E(Gk),
h~1([0,1])∩h~3([0,1])=∅,
but h~2([0,1])∩h~4([0,1])=∅.
So there is a properly embedded arc h~2([0,1])∩h~4([0,1]) immersed to h1([0,1])∩h2([0,1]) under g2,
and there is no properly embedded arc immersed to h1([0,1])∩h2([0,1]) under g1.
Hence g1,g2 are inequivalent.
∎
Proposition 6.2**.**
Let Σ be a closed oriented surface,
and let Σ0 be a compact orientable surface such that ∂Σ0 has exactly one component.
Let g:Σ0→Σ be an immersion.
Let ψ be the normal numbering of g∣∂Σ0 given by g.
Let n=maxψ.
Let ζ be an inscribed set of (g∣∂Σ0,ψ).
Then
I(ζ)=∅,
and there exists {(H~1,H1),…,(H~n,Hn)}∈I(ζ)
such that g is the inscribed set of g∣∂Σ0 related to {(H~1,H1),…,(H~n,Hn)}.
Proof.
Let f:∂Σ0→Σ be g∣∂Σ0,
then f is an homologically trivial immersion.
To prove that there exists {(H~1,H1),…,(H~n,Hn)}∈I(ζ)
such that
g is the inscribed map of f related to it,
our aim is to
construct a sequence of cancellation operations
(g,Σ0)⇝H~n(gn,Σn)⇝(H~n−1,Hn)(gn−1,Σn−1)⇝(H~n−2,Hn−1)…⇝(H~1,H2)(g1,Σ1),
where (gk,Σk)⇝(H~k−1,Hk)(gk−1,Σk−1) is the cancellation of (H~k−1,Hk)-cancellable domains in gk.
R(g)=Dn(f,ψ).
We know (Dn(f,ψ)),Vn(f,ψ)) is appropriate by Lemma 4.6.
H~n is determined by ζ,
and we denote by U(n,1),U(n,2),…,U(n,tn) the H~n-cancellable domains (Definition 4.7).
Let Hn be G(U(n,1),U(n,2),…, U(n,tn))∈sub(Hn) (Lemma 4.8),
then {(H~n,Hn)}∈ζn.
We cancel {U(n,1),U(n,2),…,U(n,tn)}.
Then obtain a space Σn and a polymersion gn:Σn→Σ.
Let fn:∂Σn→Σ be gn∣∂Σn.
Let Nn={x∣x∈V(Hn),deg(x)=3},
then Nn is the set of branch points of gn
and each element of Nn has index 1.
The cancellation of {U(n,1),U(n,2),…,U(n,tn)} is regular (Definition 3.7 (ii)),
so there exists a map hn:Hn→Σn′
associated to the cancellation of
{U(n,1),U(n,2),…,U(n,tn)}.
We now do the steps by induction.
Assume that
there exists {(H~i+1,Hi+1),…,(H~n,Hn)}∈ζi+1,
and we have gotten the cancellations
(g,Σ0)⇝H~n(gn,Σn)⇝(H~n−1,Hn)…⇝(H~i+1,Hi+2)(gi+1,Σi+1),
1⩽i⩽n−1.
Now gi+1:Σi+1→Σ is a polymersion of the compact orientable surface Σi+1 such that
R(gi+1)=Di(f,ψ).
Let fi+1:∂Σi+1→Σ be gi+1∣∂Σi+1.
We induce as follows:
(i)
Let Nj={x∣x∈V(Hj),deg(x)=3}∖Nj+1,
∀j∈{i+1,…,n} (Nn+1=∅).
Ni+1 is the set of branch points of gi+1,
and each element of it has index 1.
(ii)
There is an embedding hi+1:Hi+1→Σi+1 such that:
gi+1∘hi+1=id,
hi+1(y)∈∂Σi+1, ∀y∈Hi+1∩∂Di+1(f,ψ),
and hi+1(Ni+1) is the set of critical points of gi+1.
(iii)
For each x∈Ni+1,
let t=hi+1(x),
which is the critical point of multiplicity 1 mapped to x.
Let a,b,c be the 3 edges of Hi+1 at x clockwise.
Then hi+1(a),hi+1(c),hi+1(b) are clockwise around t.
We know (Di(f,ψ),Hi+1,Ni+1∩Vi(f,ψ)) is appropriate by Lemma 4.9.
The graph H~i is determined by {(H~i+1,Hi+1),…,(H~n,Hn)}∈ζi+1.
We denote by U(i,1),U(i,2),…,U(i,ti)⊆Σi+1 the H~i-cancellable domains (Definition 4.10).
Let Hi be G(U(i,1),U(i,2),…,U(i,ti))∈subHi+1(H~i) (Lemma 4.11),
then {(H~i,Hi),(H~i+1,Hi+1)…,(H~n,Hn)}∈ζi.
We cancel {U(i,1),U(i,2),…,U(i,ti)},
and obtain a surface Σi and a polymersion
gi:Σi→Σ.
Let fi:∂Σi→Σ=gi∣∂Σi.
Note that the elements of Ni+1 are not branch points of gi (induction hypothesis (iii)),
and the cancellation of {U(i,1),U(i,2),…,U(i,ti)} is regular.
So there exists an associated map hi:Hi→Σi
of canceling
{U(i,1),U(i,2),…,U(i,ti)}.
Let Ni={x∣x∈V(Hi),deg(x)=3}∖Ni+1,
then Ni is the set of branch points of gi,
and each element of Ni has index 1.
Also,
the images of edges of Hi at Ni have positions in accordance with induction hypothesis (iii).
So the induction hypothesises (i), (ii), (iii) are established when k=n.
We construct cancellations
(g,Σ0)⇝H~n(gn,Σn)⇝(H~n−1,Hn)…⇝(H~1,H2)(g1,Σ1)
by the induction.
Next,
we prove {(H~1,H1),…,(H~n,Hn)}∈I(ζ).
Assume r:A→B is a polymersion (A,B are surfaces).
For each x∈B,
let dr(x)=#({r−1(x)})+i(x)) (i(x)= the index of x if x is a branch point, otherwise i(x)=0).
Then dgi+1(x)−dgi(x)=1 if x∈Di(f,ψ),
dgi+1(x)=dgi(x) if x∈/Di(f,ψ),
∀i∈{3,4,…,n}.
After n−1 steps,
dg2(x)=1, ∀x∈D1(f,ψ).
So Σ2 is homeomorphically embedded into D1(f,ψ) by g2.
This means H1=∅.
Σ0 is connceted so Hk=∅,
∀k⩾2.
So we get a good graph set {(H~1,H1),…,(H~n,Hn)}∈ζ from the steps above,
and g is the inscribed map of f related to it.
∎
7 Summary
We summarize the result without fixing a normal numbering as follows.
Fix a closed oriented surface Σ and a homologically trivial immersion f:S1→Σ.
Let ψi denote the normal numbering of f such that minψi=i,
i∈Z⩾0.
Let ζ be an inscribed set of (f,ψ0).
We construct ζ0,ζ−1,ζ−2,… as follows:
we similarly obtain ζ−i from ζ−i+1 as obtaining ζk from ζk+1 (k⩾1) in Definition 5.2, i⩾0.
Let I(ζ−i) (i⩾0) be the set composed of each {(H~−i,H−i),…,(H~0,H0),(H~1,H1),…,(H~n,Hn)}∈ζ−i
such that H−i=∅, Hk=∅, for each −i+1⩽k⩽n.
Now,
each element of
I(ζ−i) (i⩾0) is in correspondence with an inscribed map of (f,ψi+1),
which is an immersion of a connected oriented surface into Σ.
Recall that the extensions related to different normal numberings are inequivalent (or, see [8, Lemma 5.3.2]).
Applying Theorem 1 for all normal numberings to
get a bijection between the set of all equivalence classes of extensions of f and I(ζ)∪(⋃i⩾0I(ζ−i)).
Our definitions and results can be extended to the cases of Σ=R2 or Σ is a compact orientable surface with nonempty boundary.
In these cases,
since arbitrary extensions of f (if exist) are related to a unique normal numbering,
we only need to consider one normal numbering (see Subsection 2.1).
8 Examples
Example 8.1**.**
Let f:S1→R2 be an immersion such that f(S1) is a Milnor curve (Figure 1).
Let ψ be the normal numbering whose images are winding numbers.
Fix ζ an inscribed set of (f,ψ) shown by Figure 8 (a), (b) (assume X∈ζi, X={(H~i(X),Hi(X)),…,(H~3(X),H3(X))}. We only paint Hi(X),…,Hn(X) in the figure of it).
Then I(ζ) is shown by Figure 8 (c).
The inscribed maps related to the elements of I(ζ) are also shown by it.
Example 8.2**.**
Let Σ be a surface of genus 2
and f:S1→Σ the immersion shown by Figure 9.
Assume ψ is a normal numbering such that the left and right side of f(S1) has image 2 and 1.
We set H~2 (see Figure 9) that has 3 edges B1,B2,B3.
H2 can be B1∪B2 or B1∪B3 or B2∪B3.
Hence there are 3 inequivalent extensions exactly.
9 Acknowledgments
I thank Professor Shicheng Wang, since he introduced me the book Problems in Low-dimensional Topology and intrigued my thinking through the discussion, and encouraging me insisting in my initial idea. I thank Professor Yi Liu for his much advice, especially in suggesting me to try applying my planar technique to the case of surface. I thank Professor Jiajun Wang, in pointing out the things I should do, and set the standard for me. I am grateful to them.

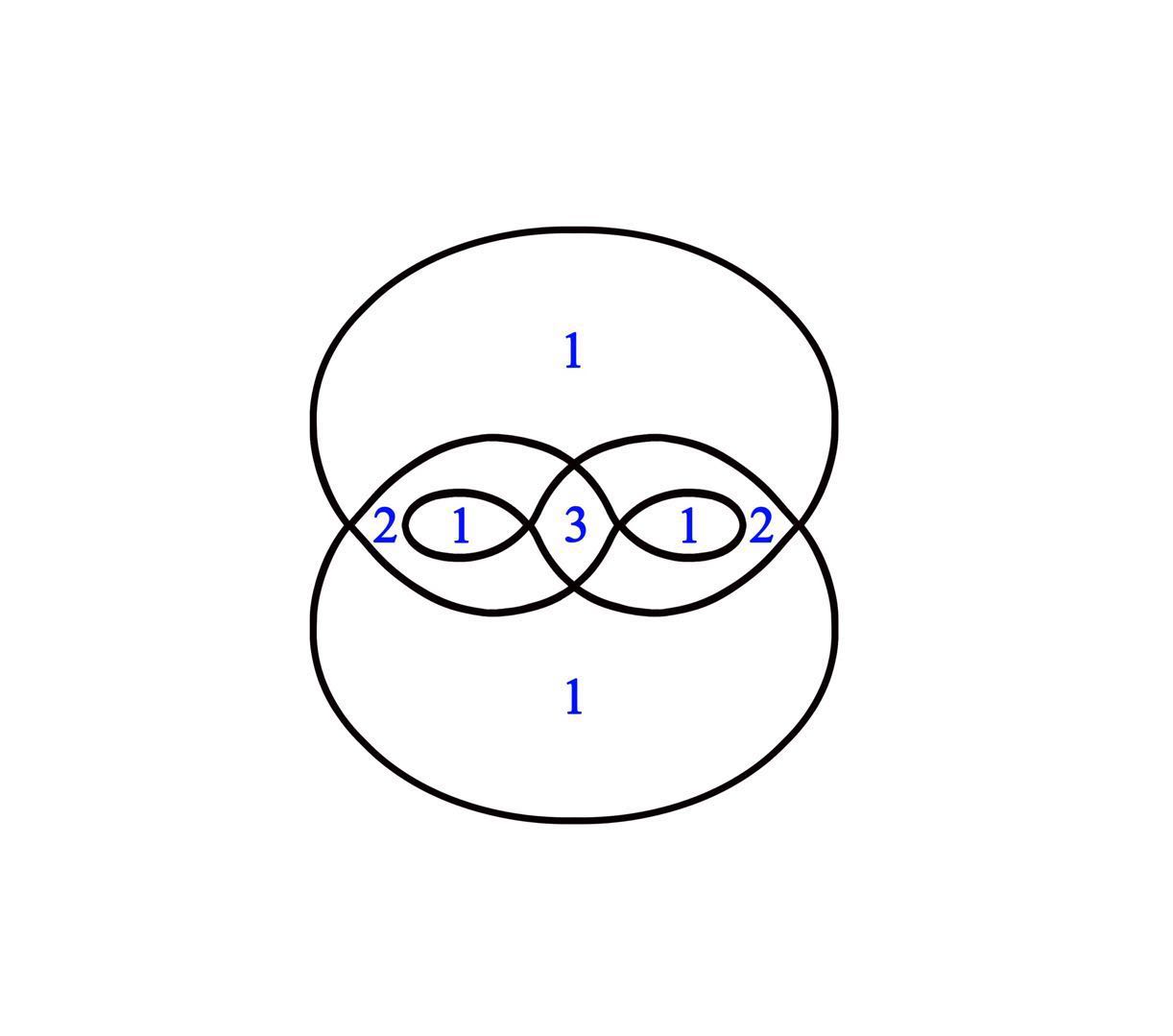 Figure 1
Figure 1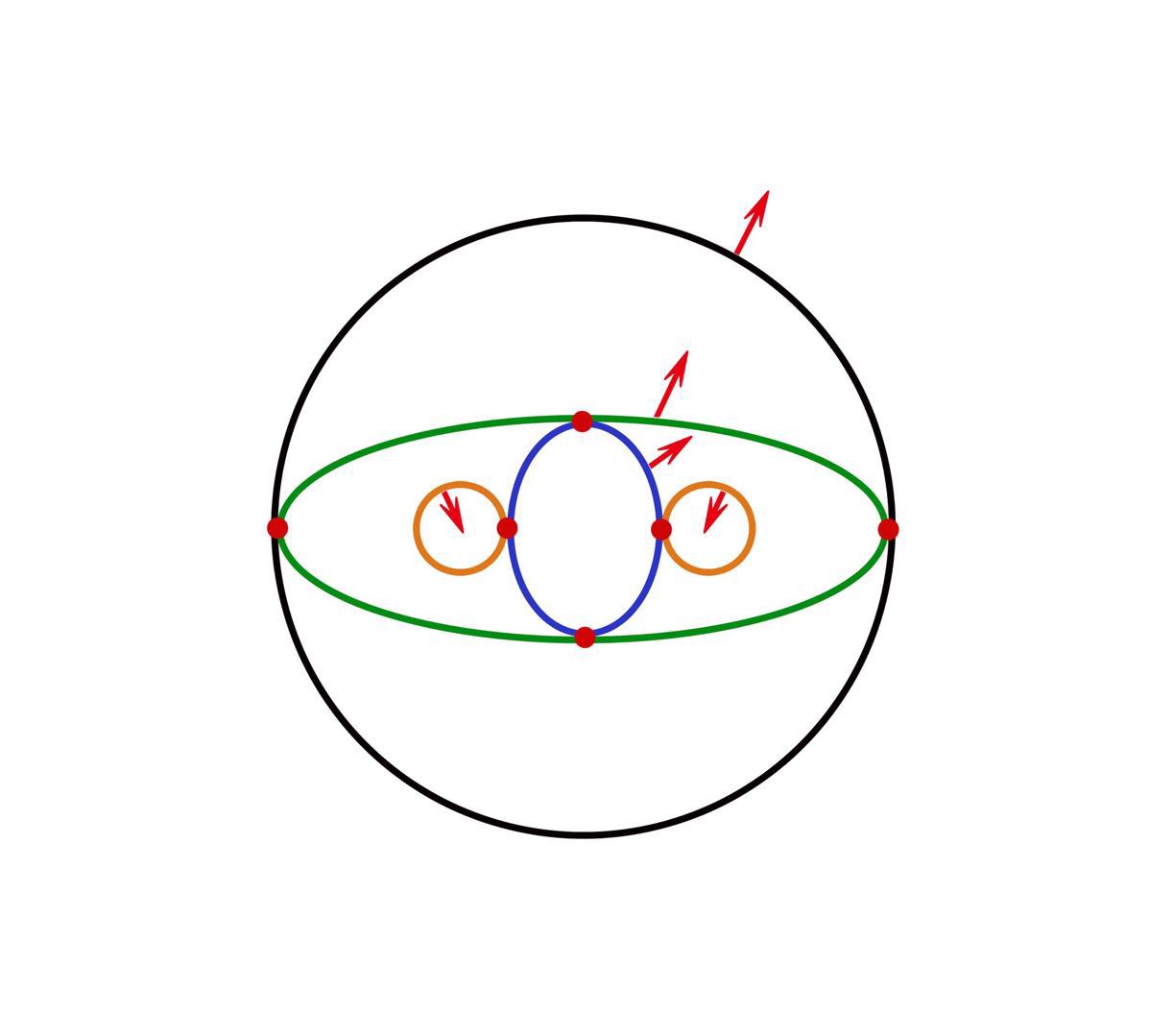 Figure 2
Figure 2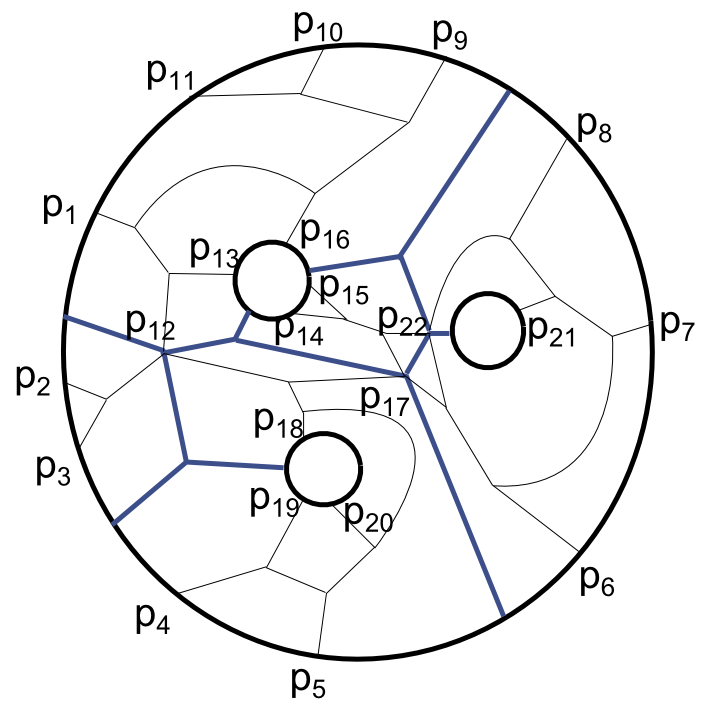 Figure 3
Figure 3 Figure 4
Figure 4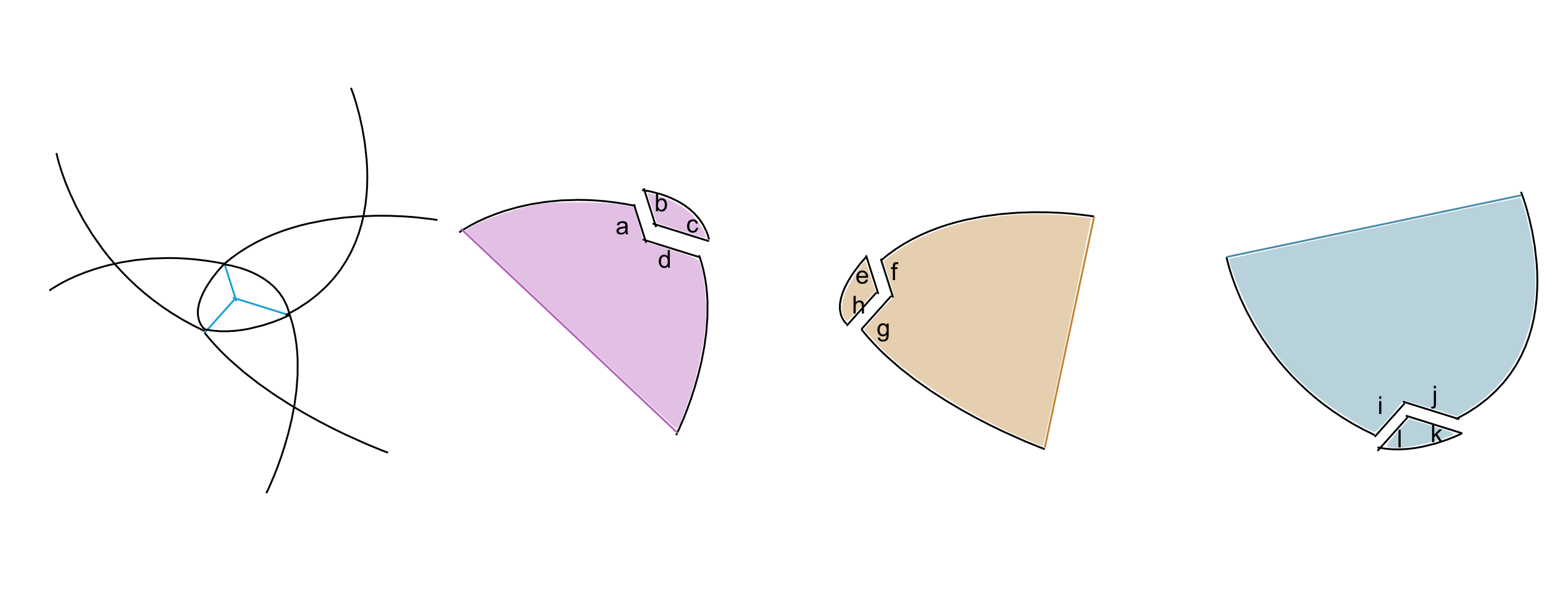 Figure 5
Figure 5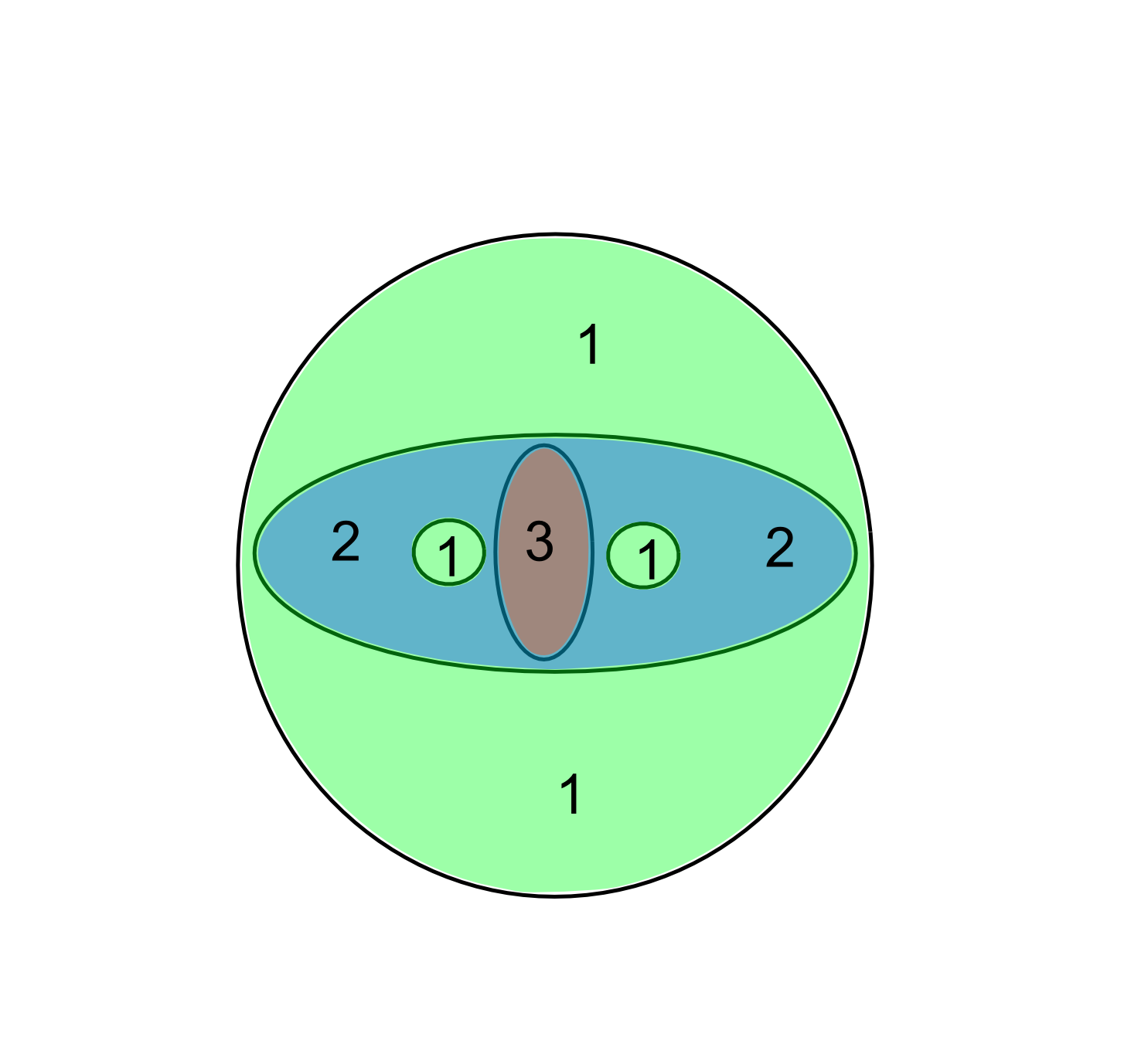 Figure 6
Figure 6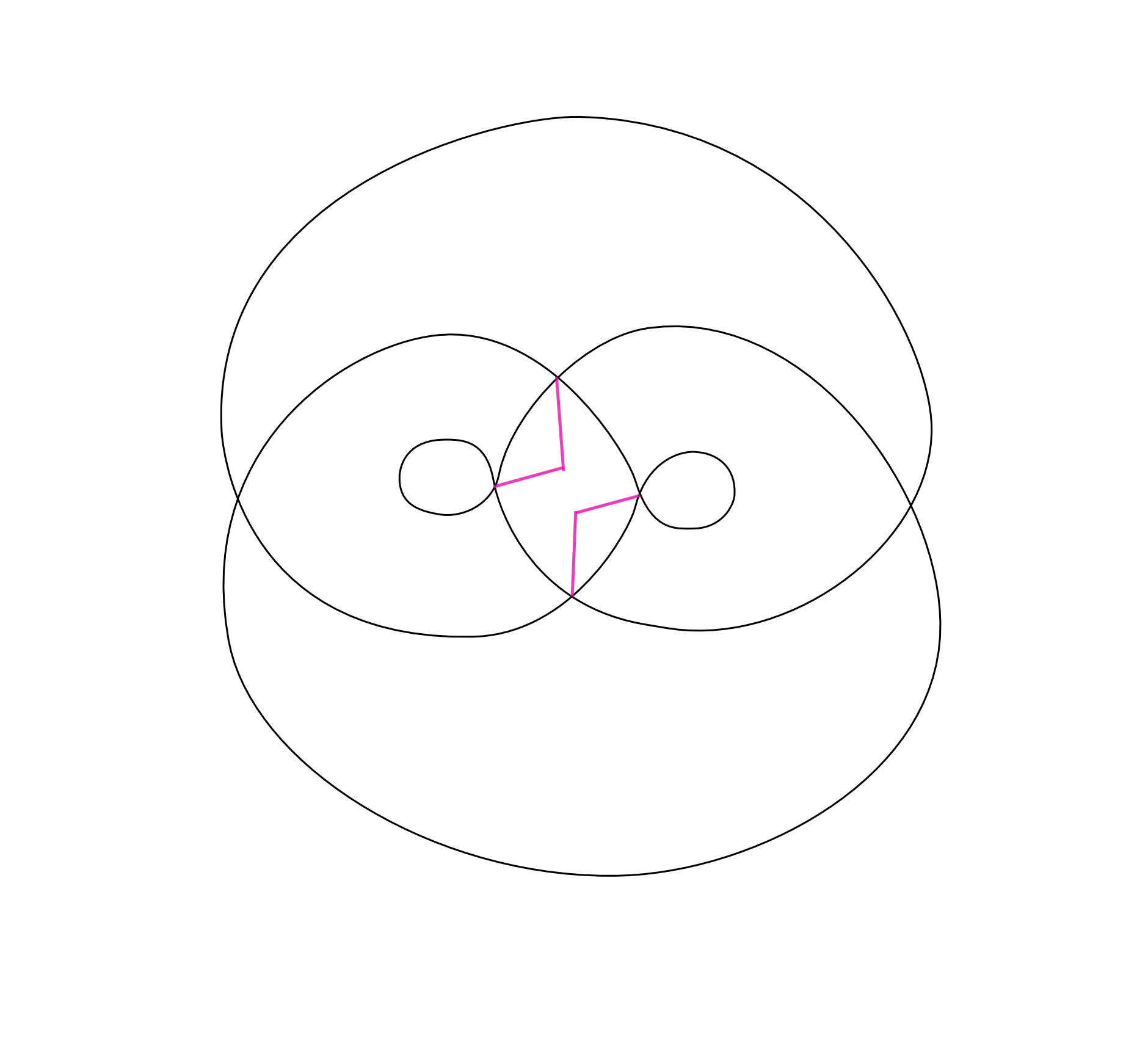 Figure 7
Figure 7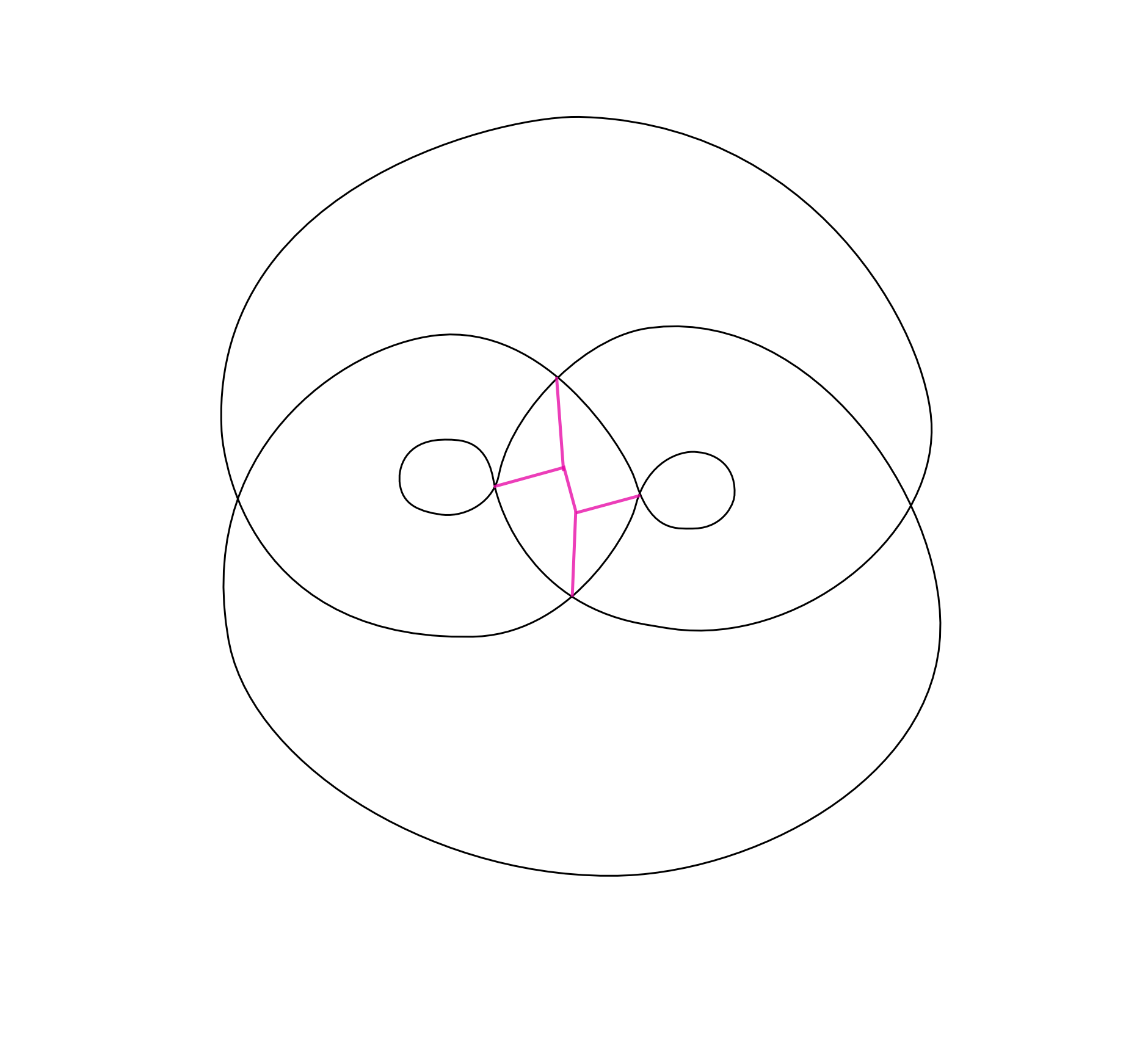 Figure 8
Figure 8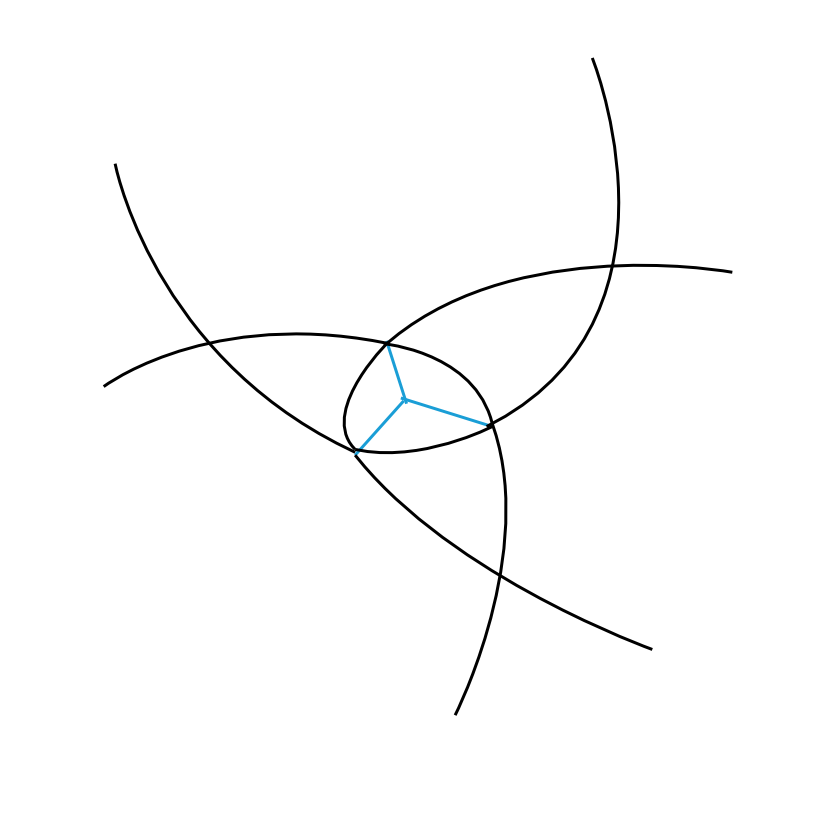 Figure 9
Figure 9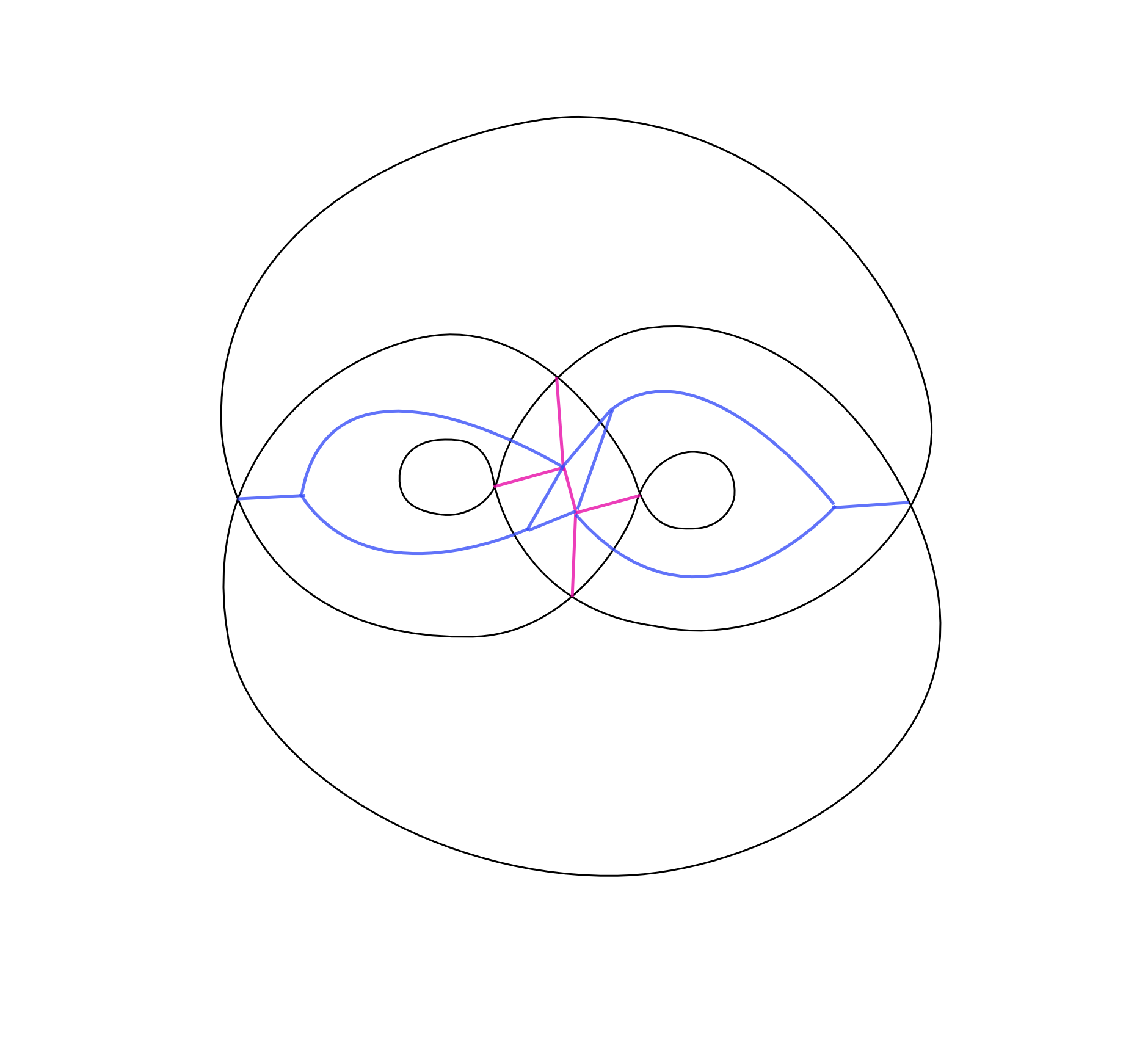 Figure 10
Figure 10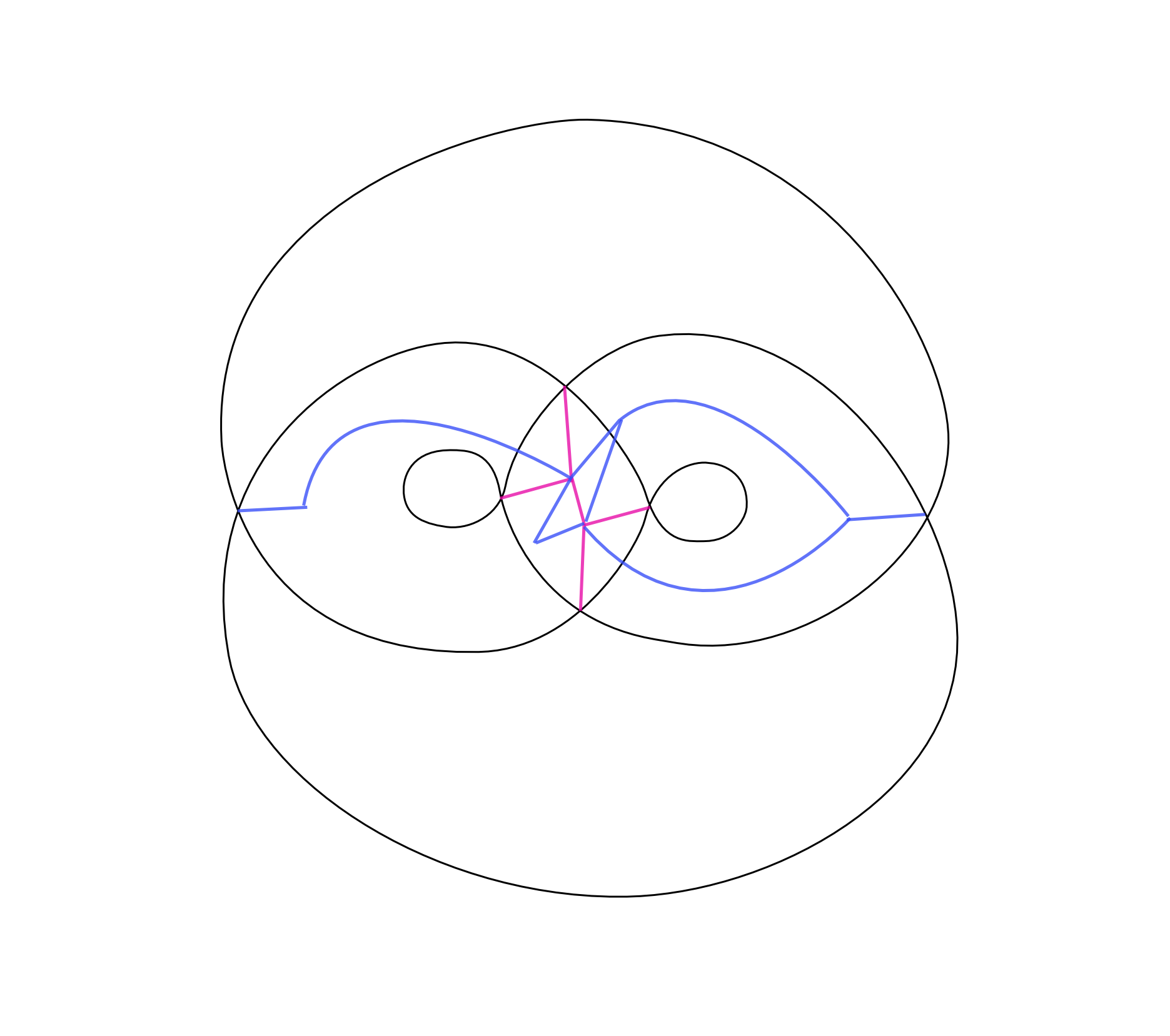 Figure 11
Figure 11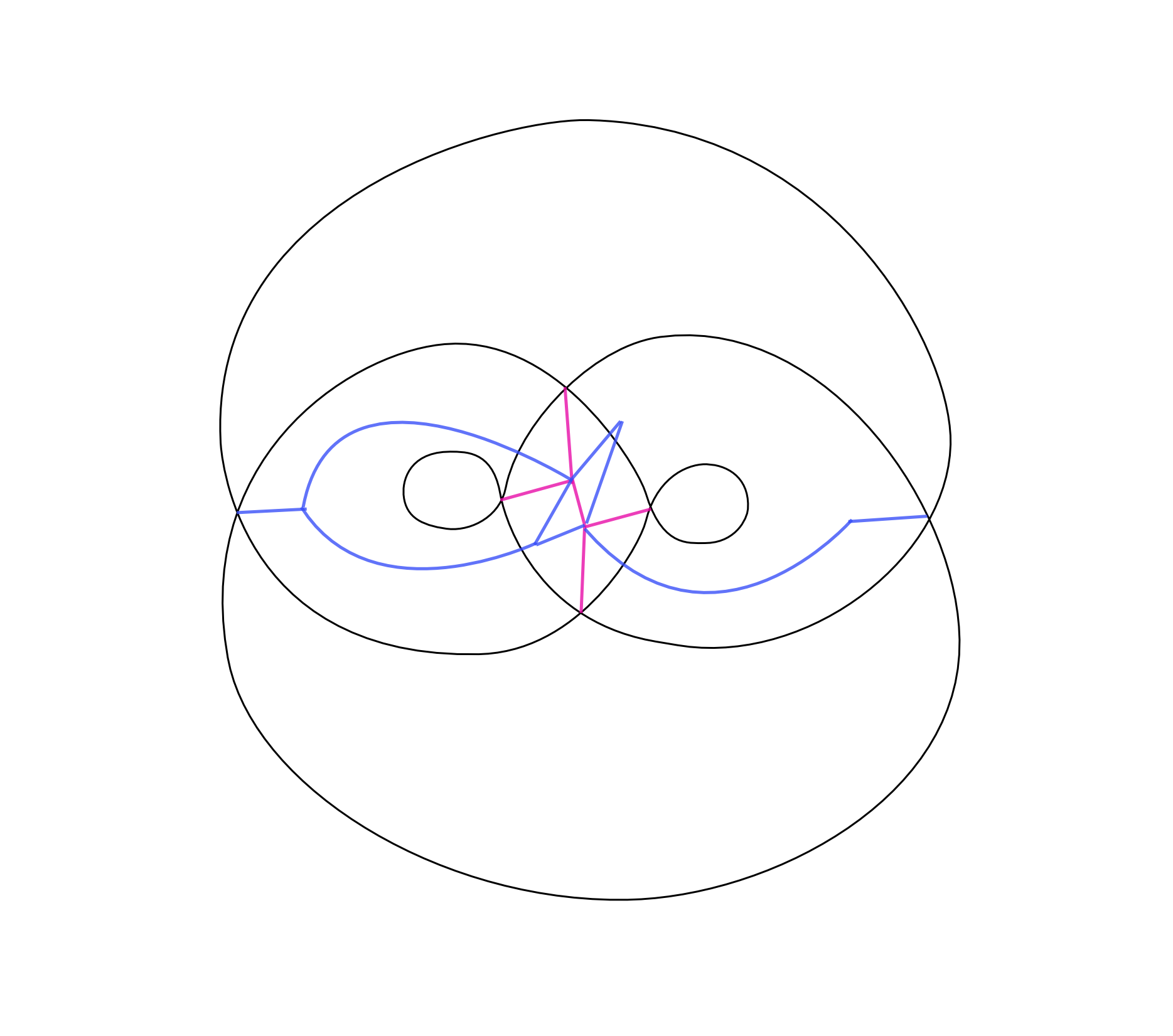 Figure 12
Figure 12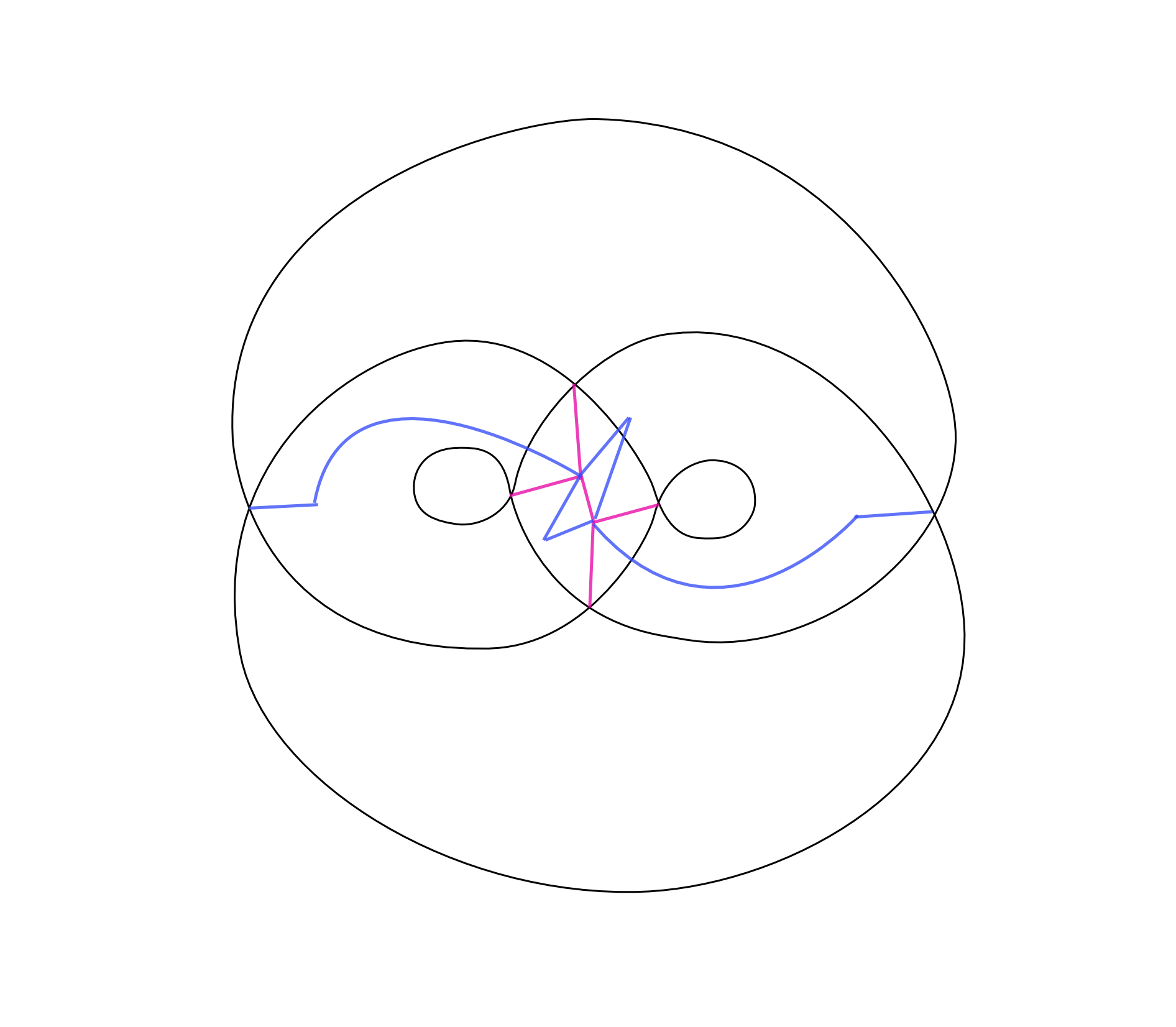 Figure 13
Figure 13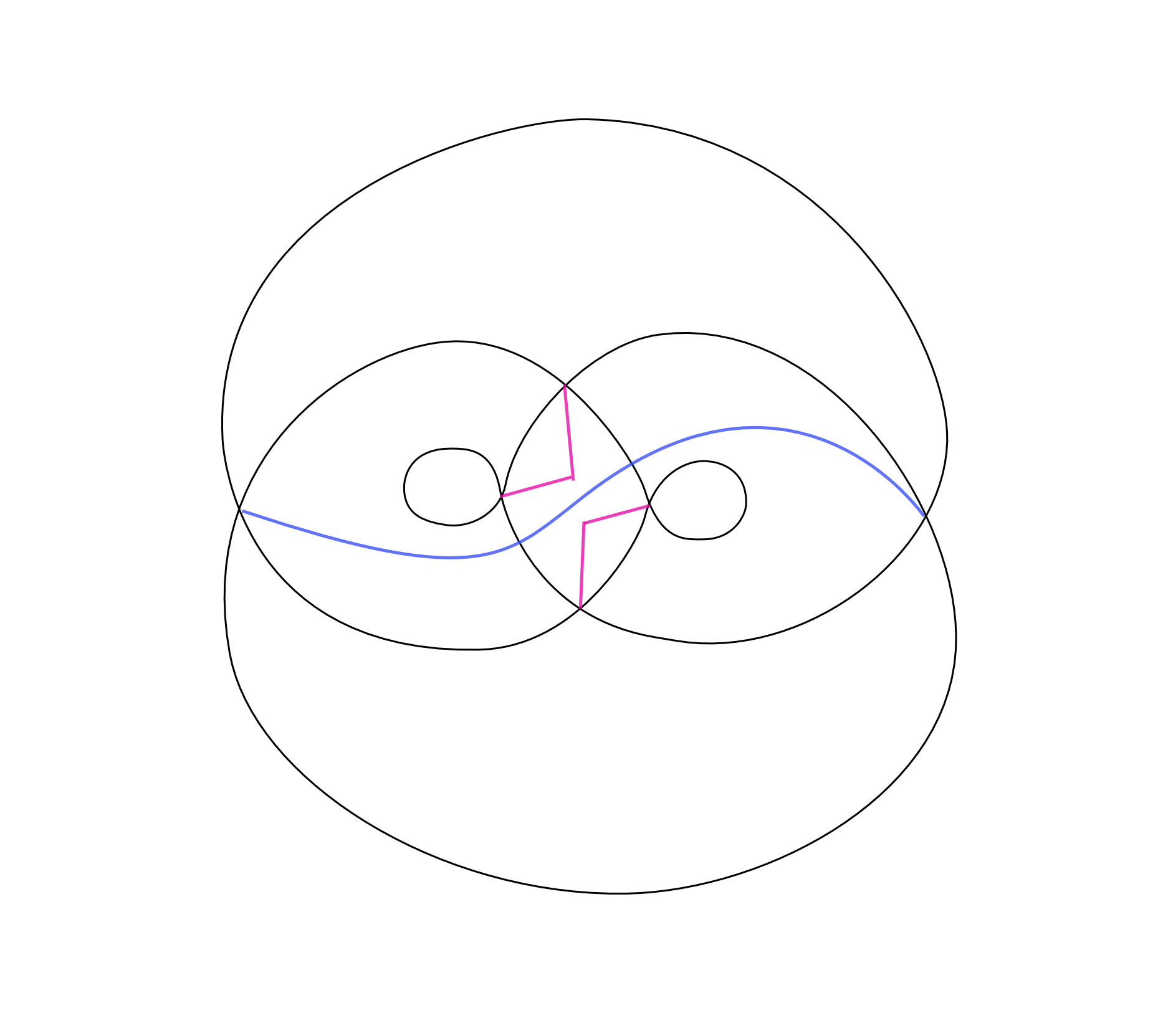 Figure 14
Figure 14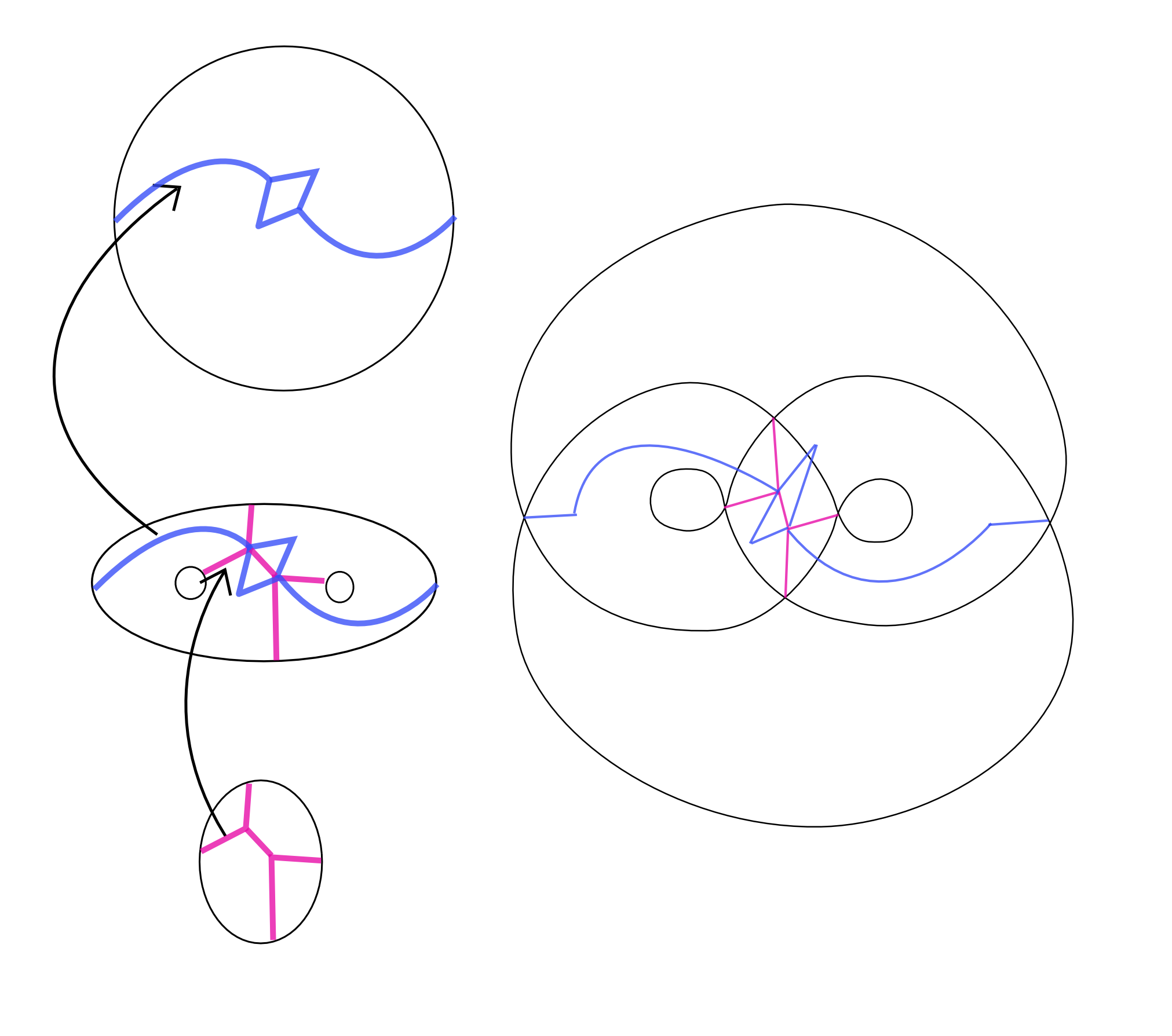 Figure 15
Figure 15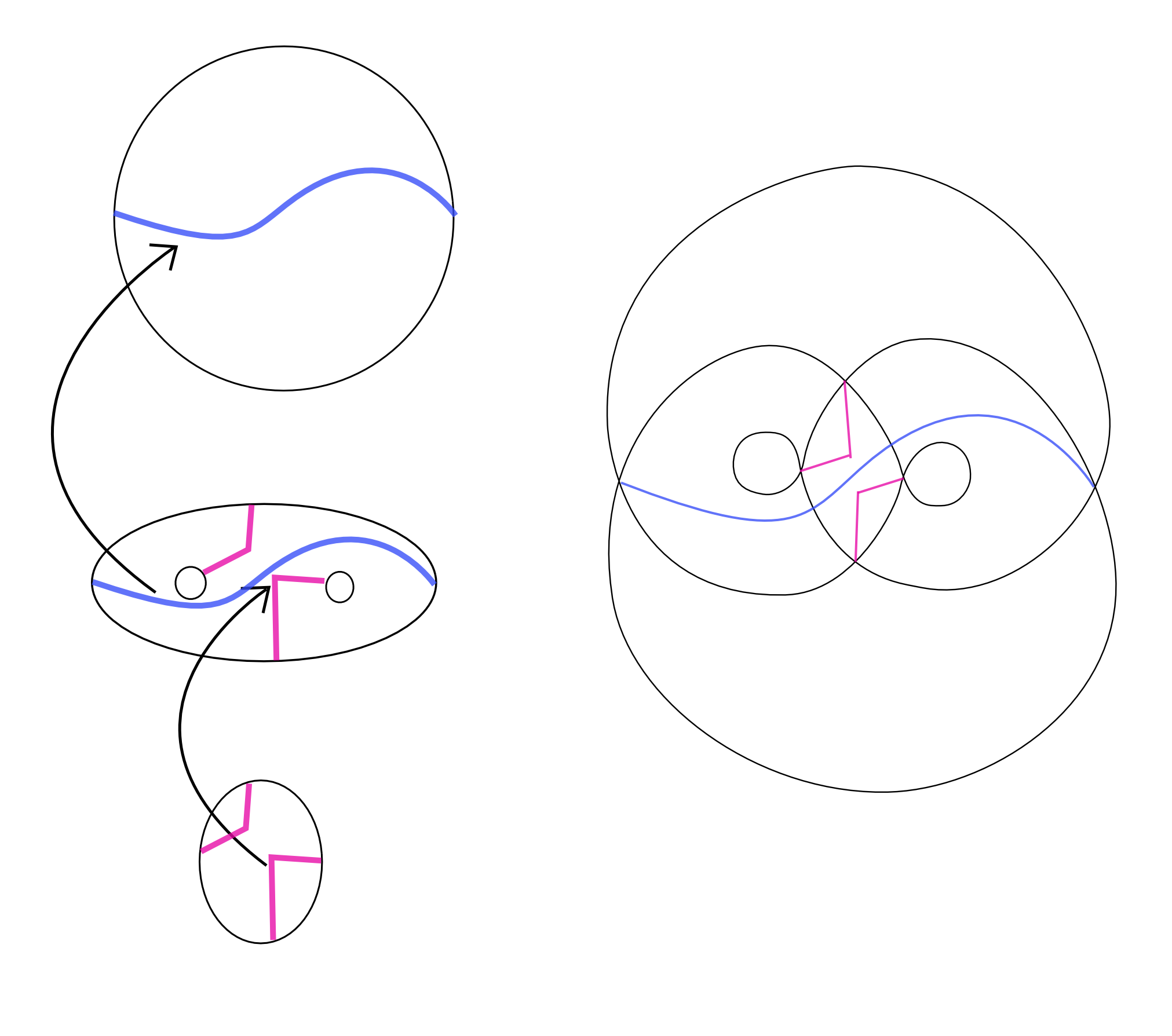 Figure 16
Figure 16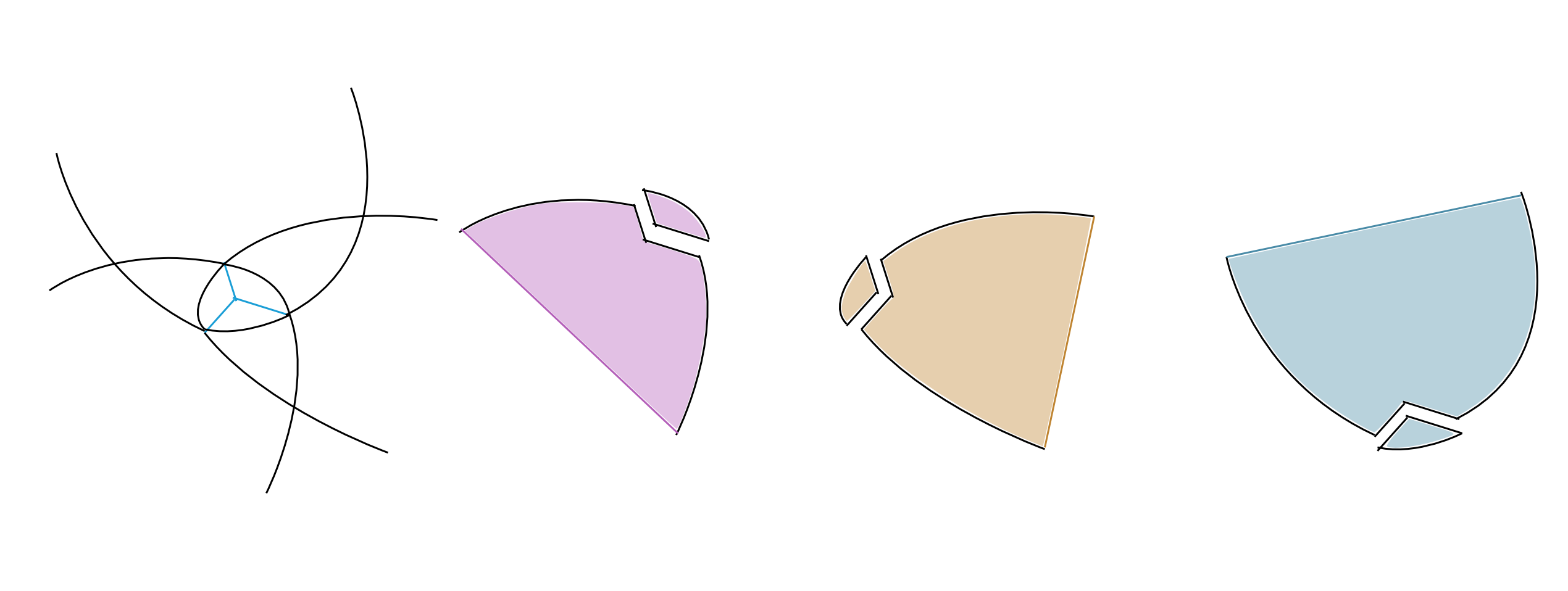 Figure 17
Figure 17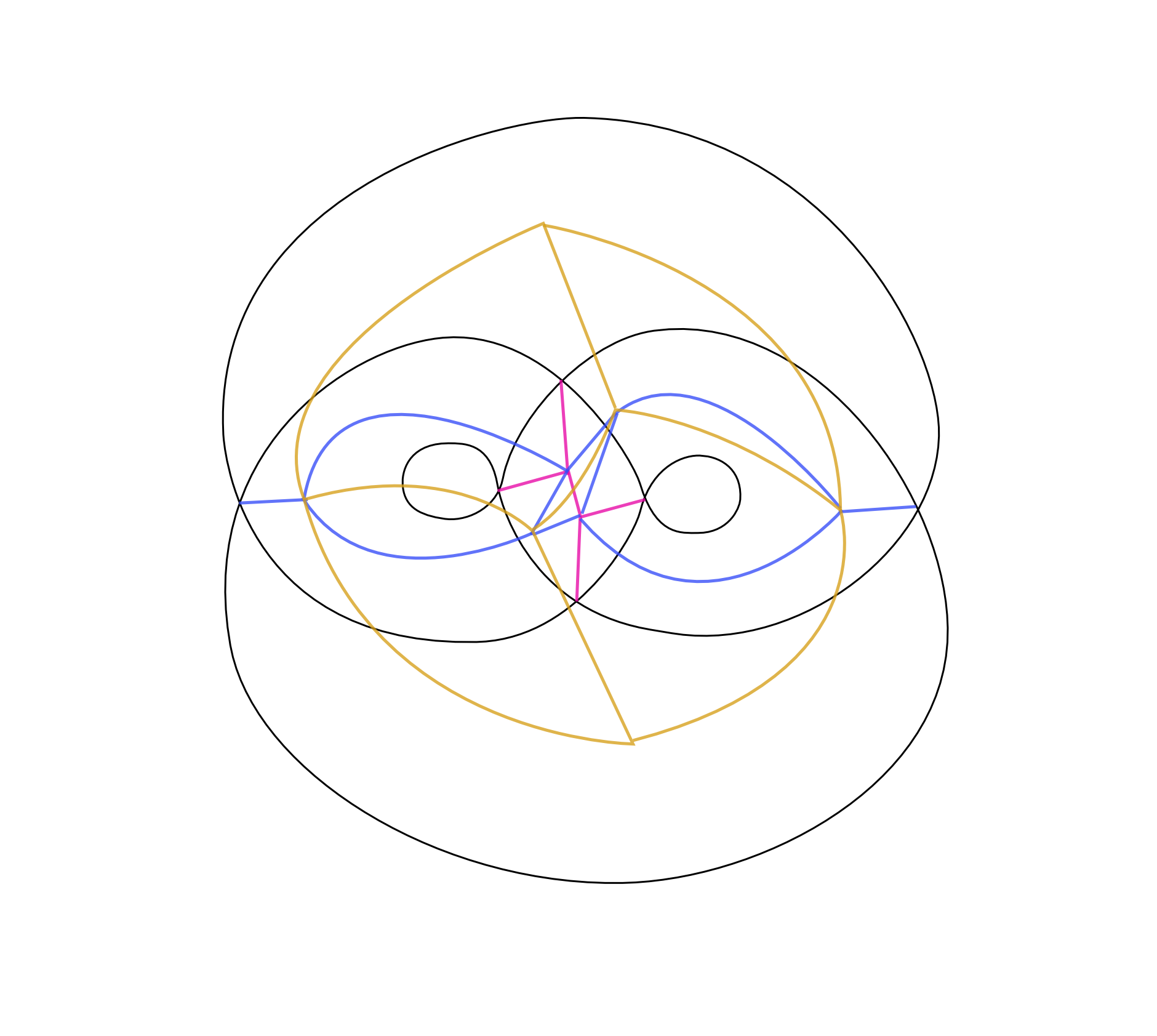 Figure 18
Figure 18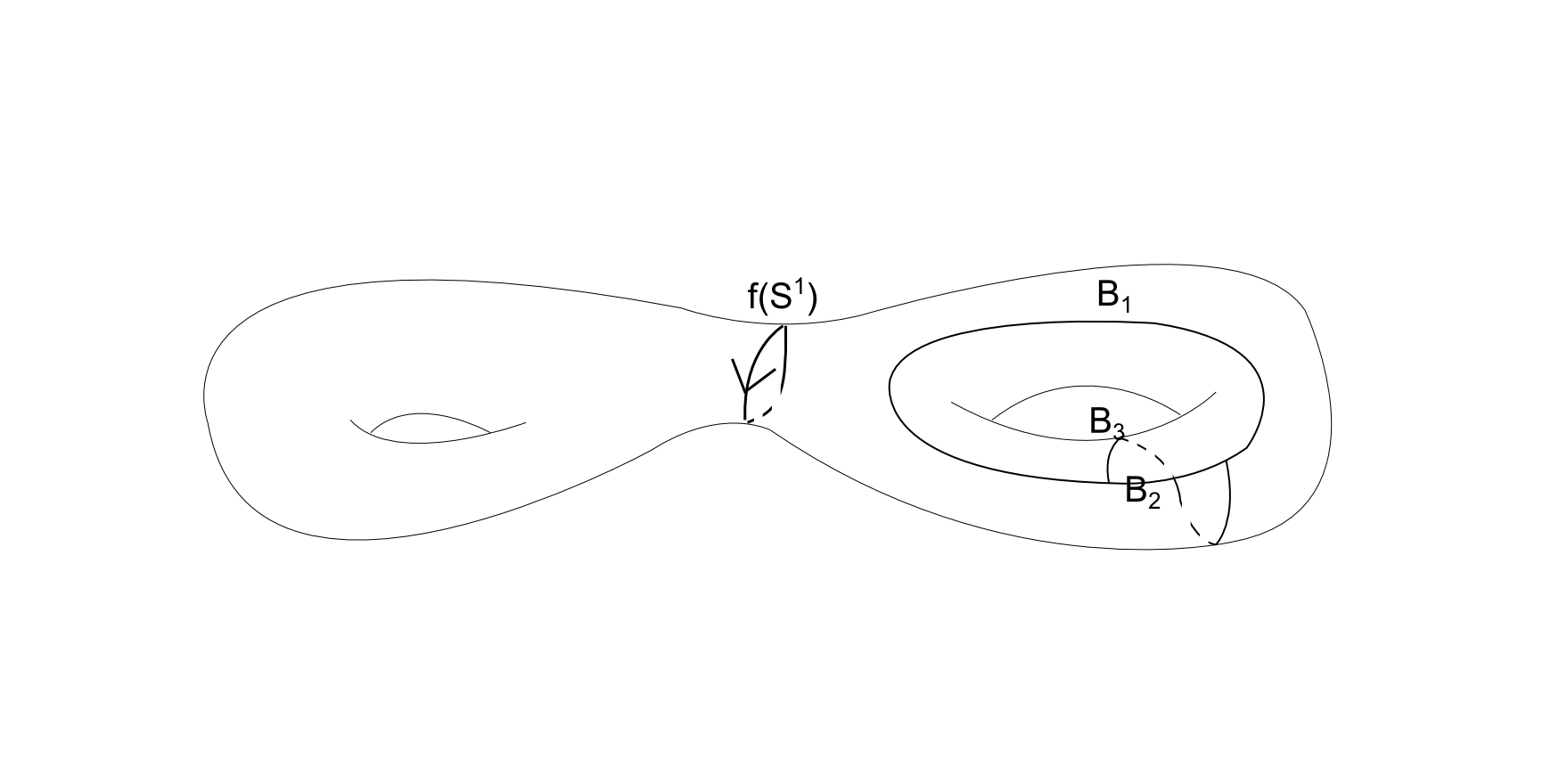 Figure 19
Figure 19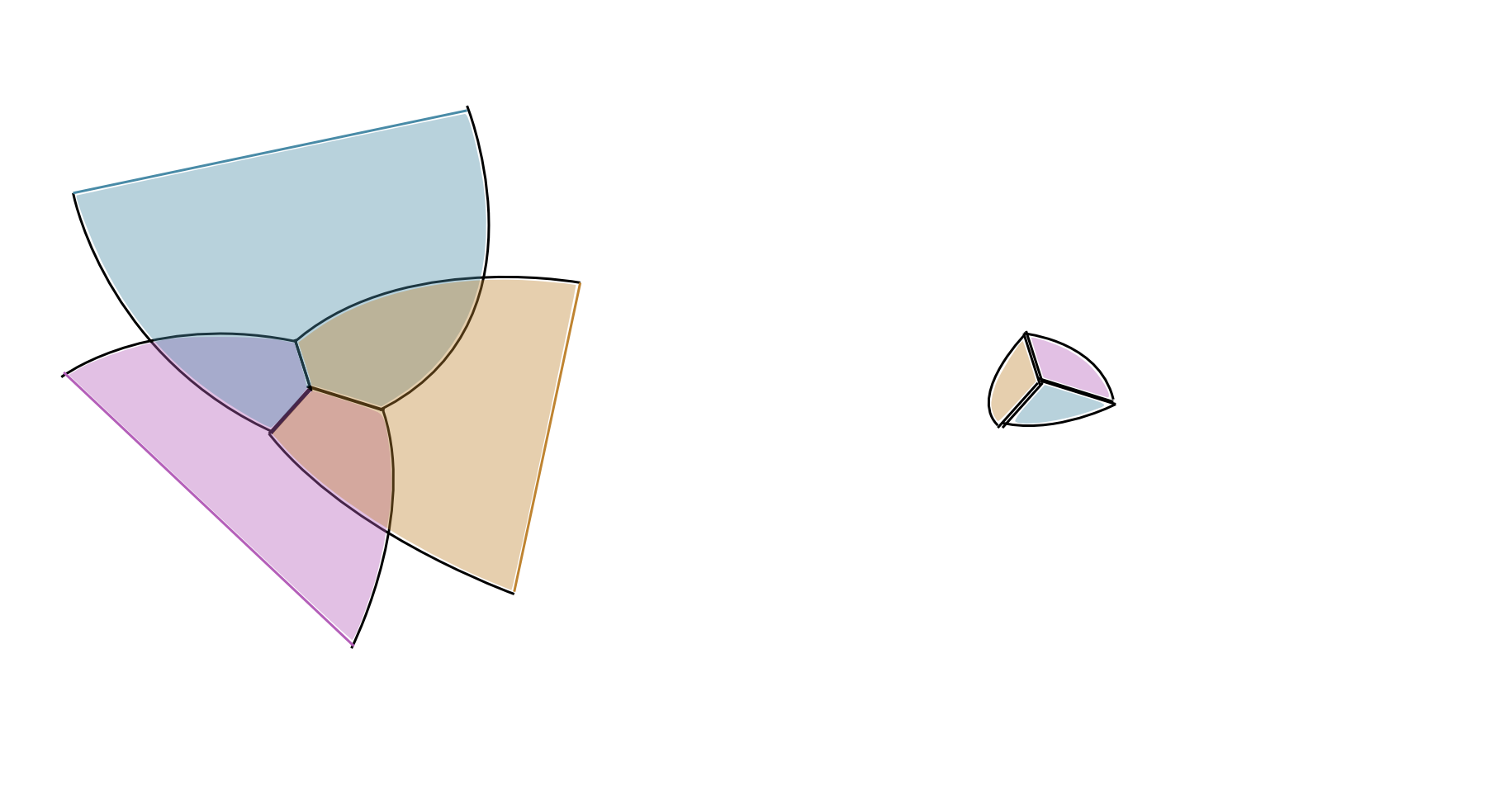 Figure 20
Figure 20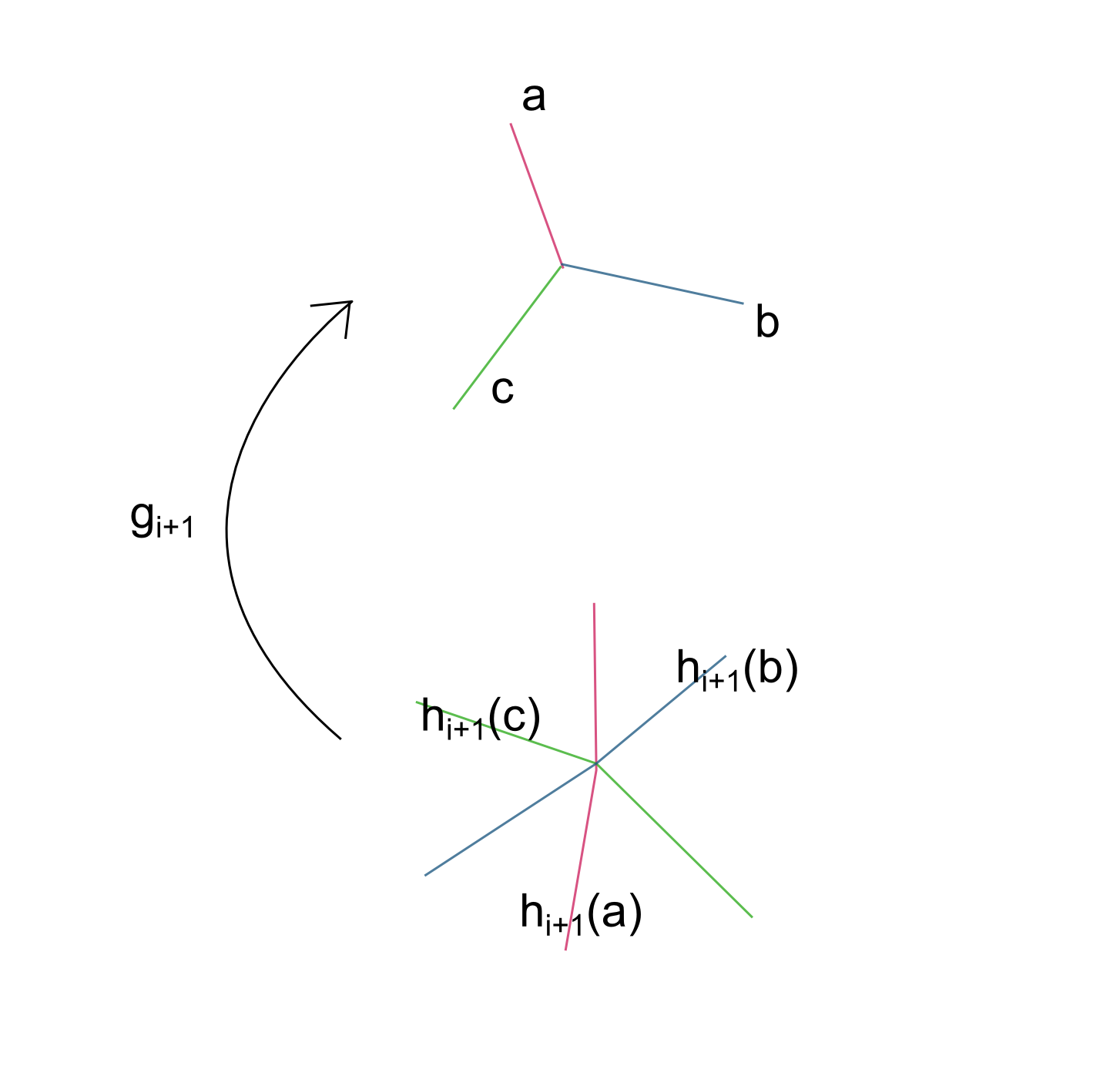 Figure 21
Figure 21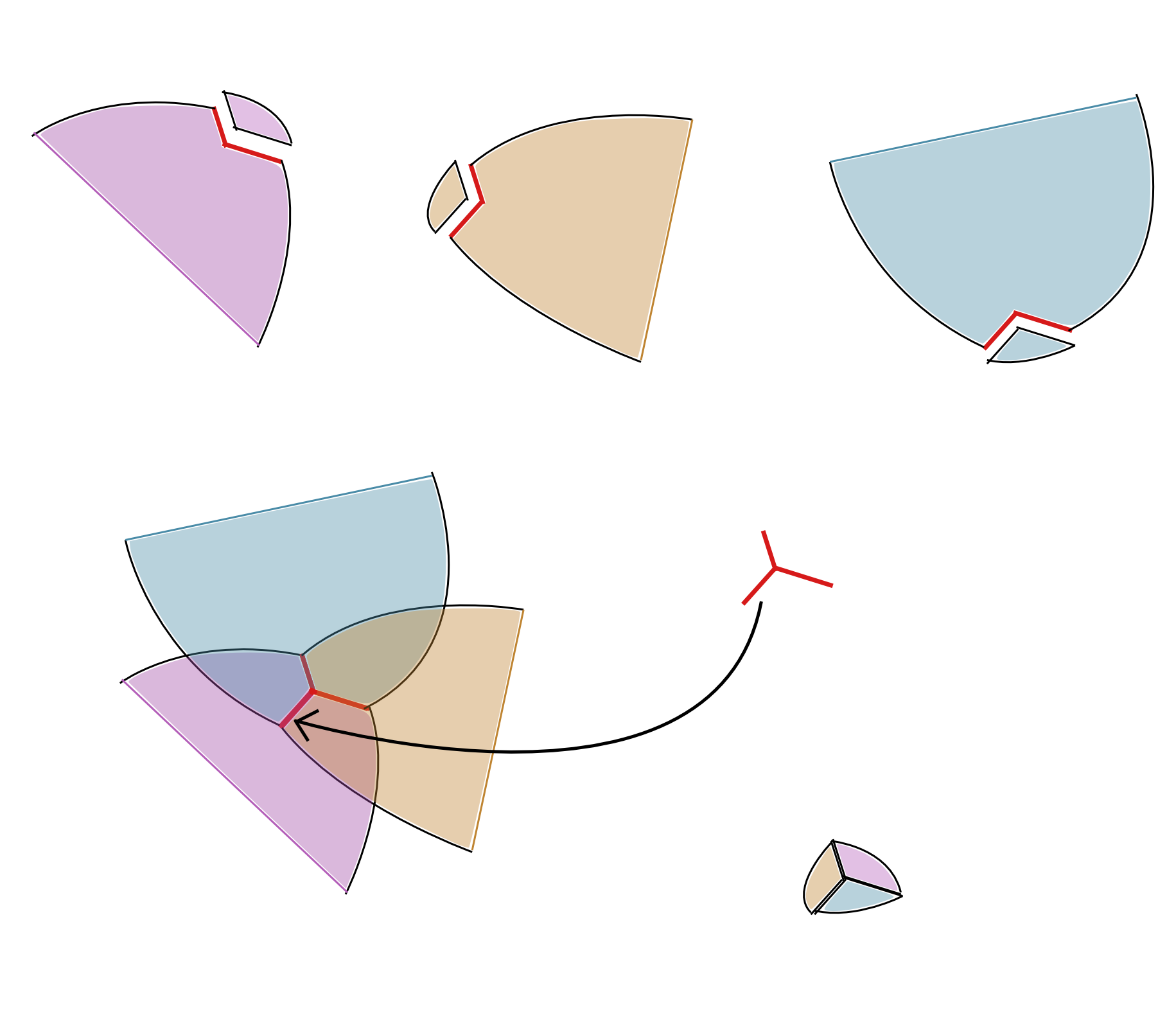 Figure 22
Figure 22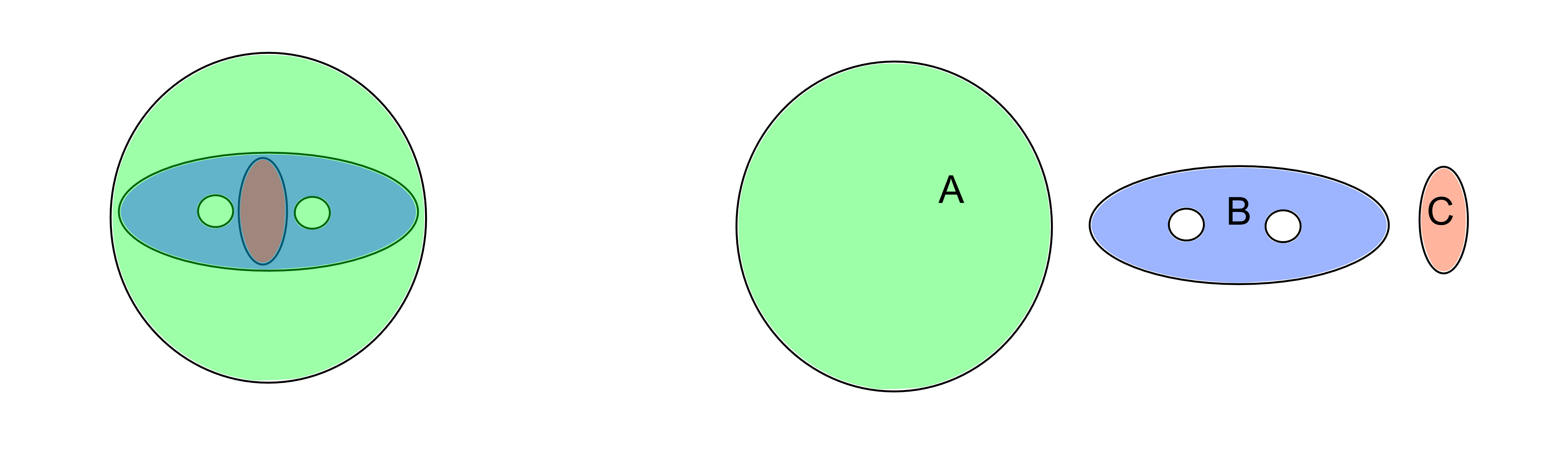 Figure 23
Figure 23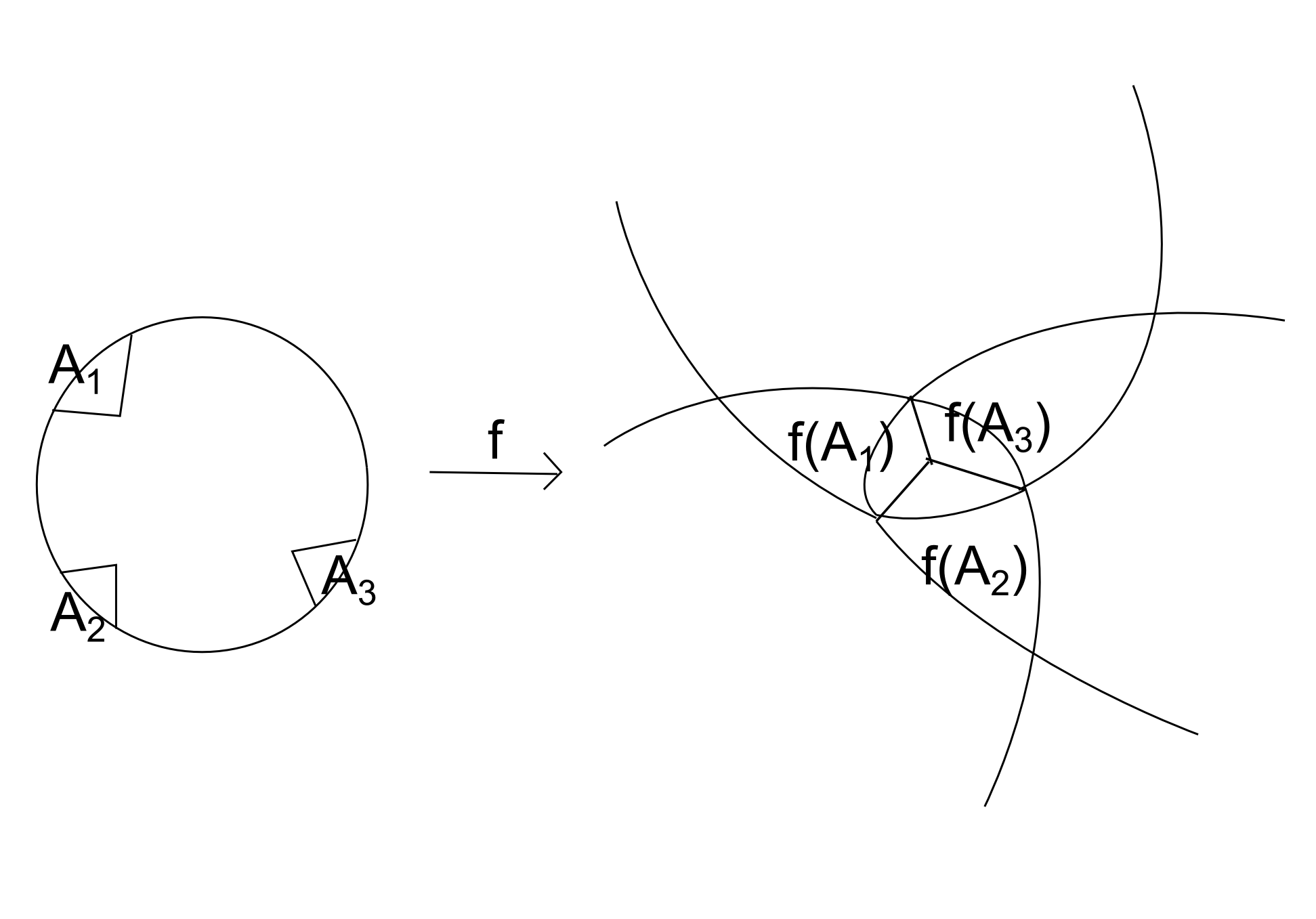 Figure 24
Figure 24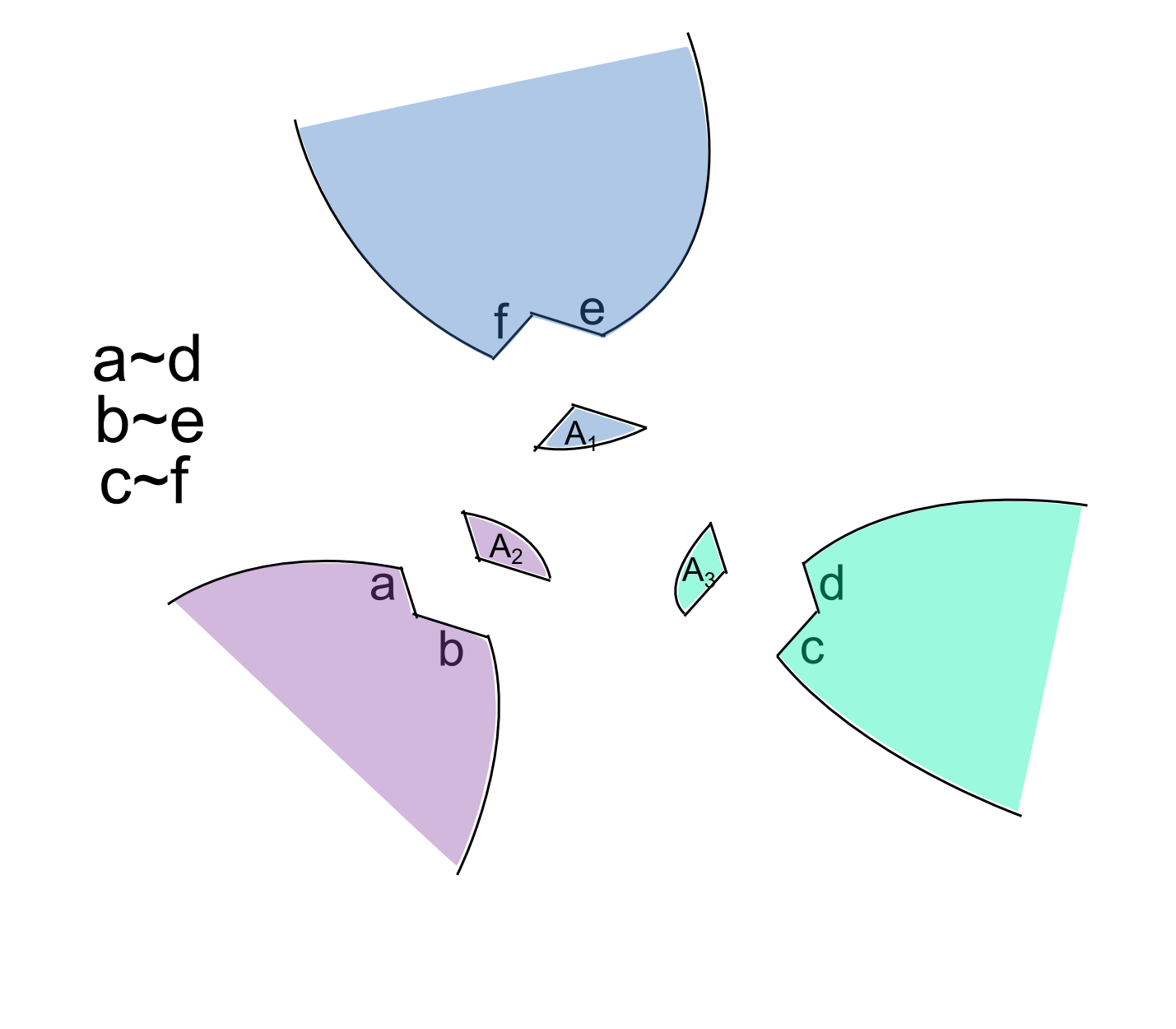 Figure 25
Figure 25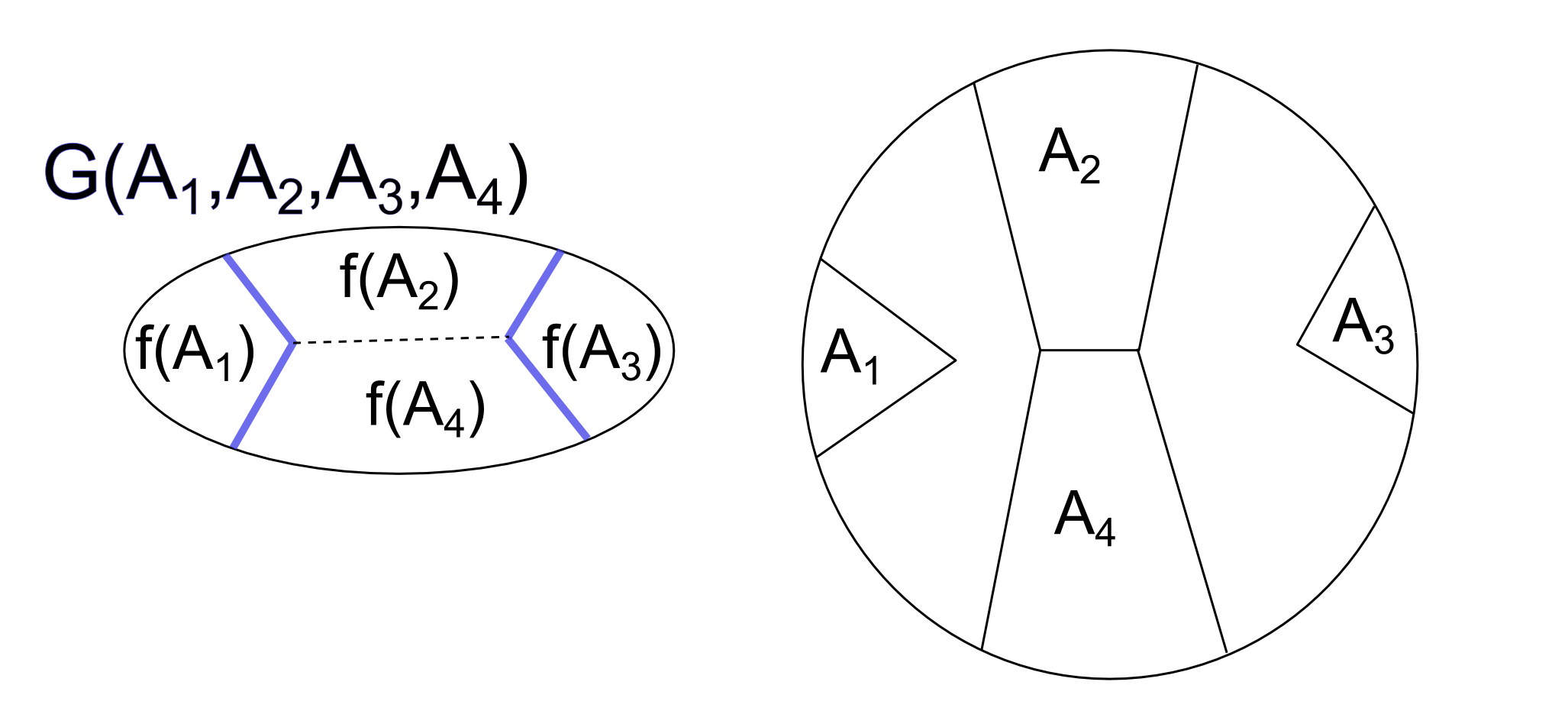 Figure 26
Figure 26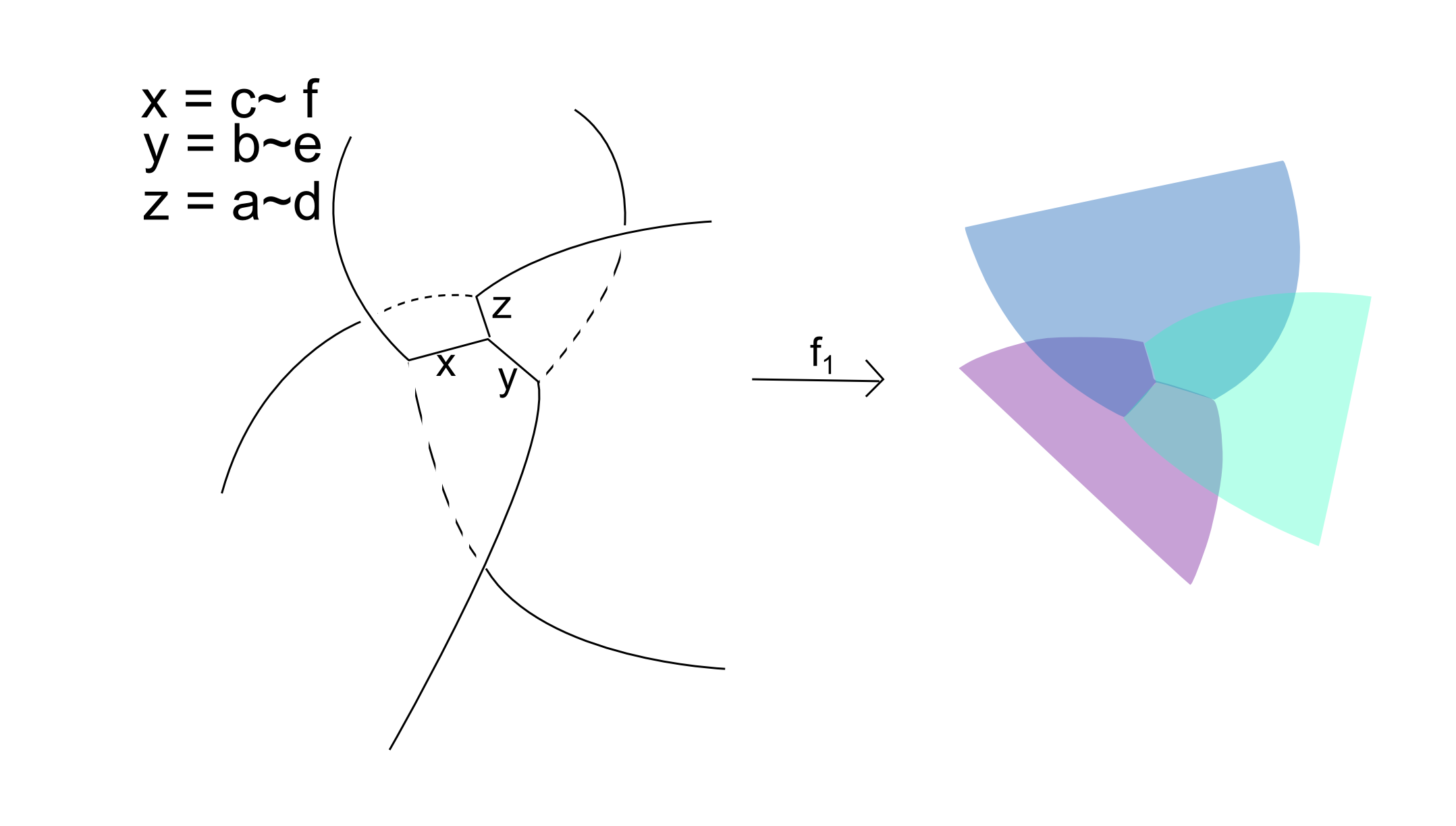 Figure 27
Figure 27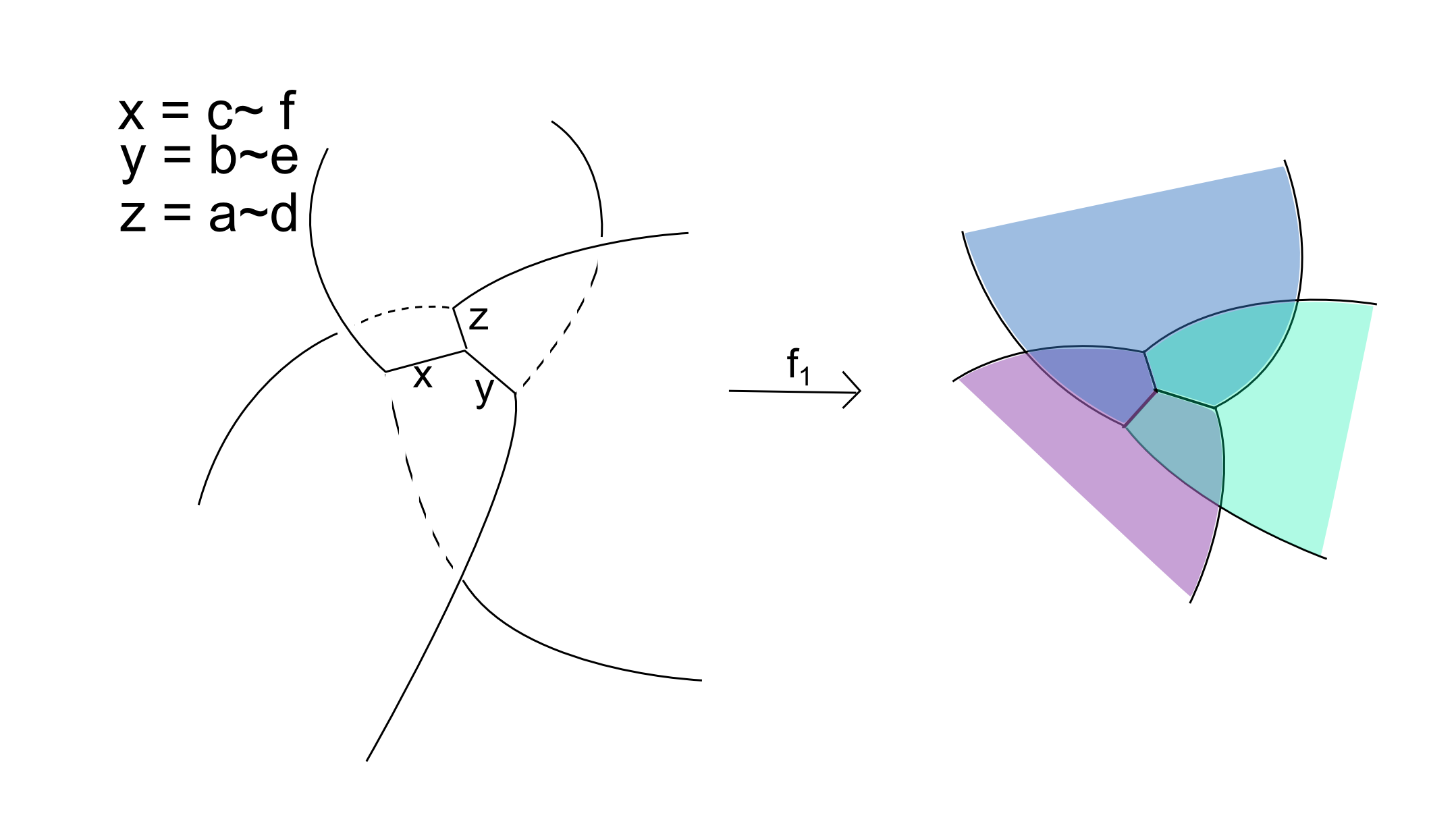 Figure 28
Figure 28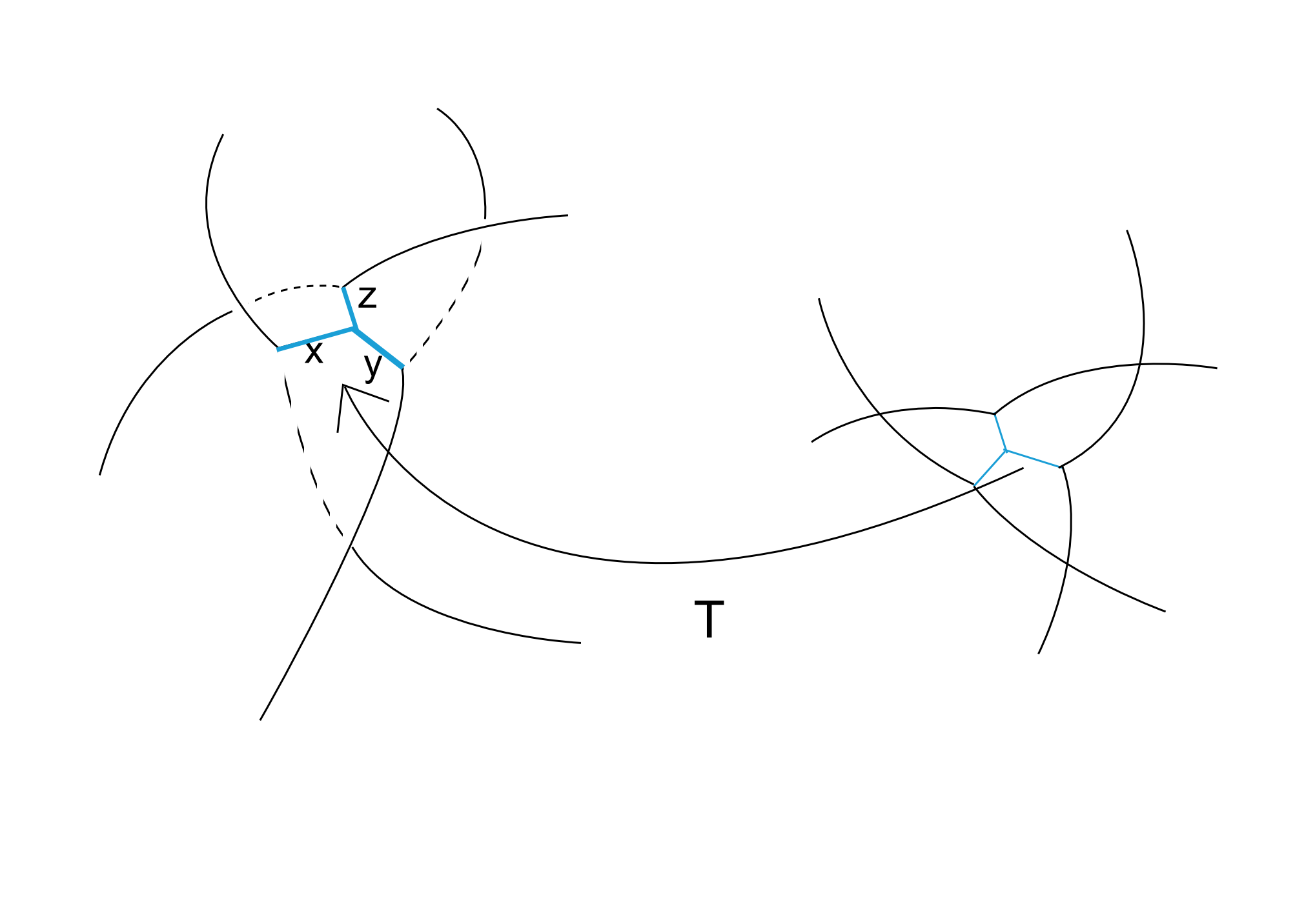 Figure 29
Figure 29 Figure 30
Figure 30 Figure 31
Figure 31 Figure 32
Figure 32 Figure 33
Figure 33 Figure 34
Figure 34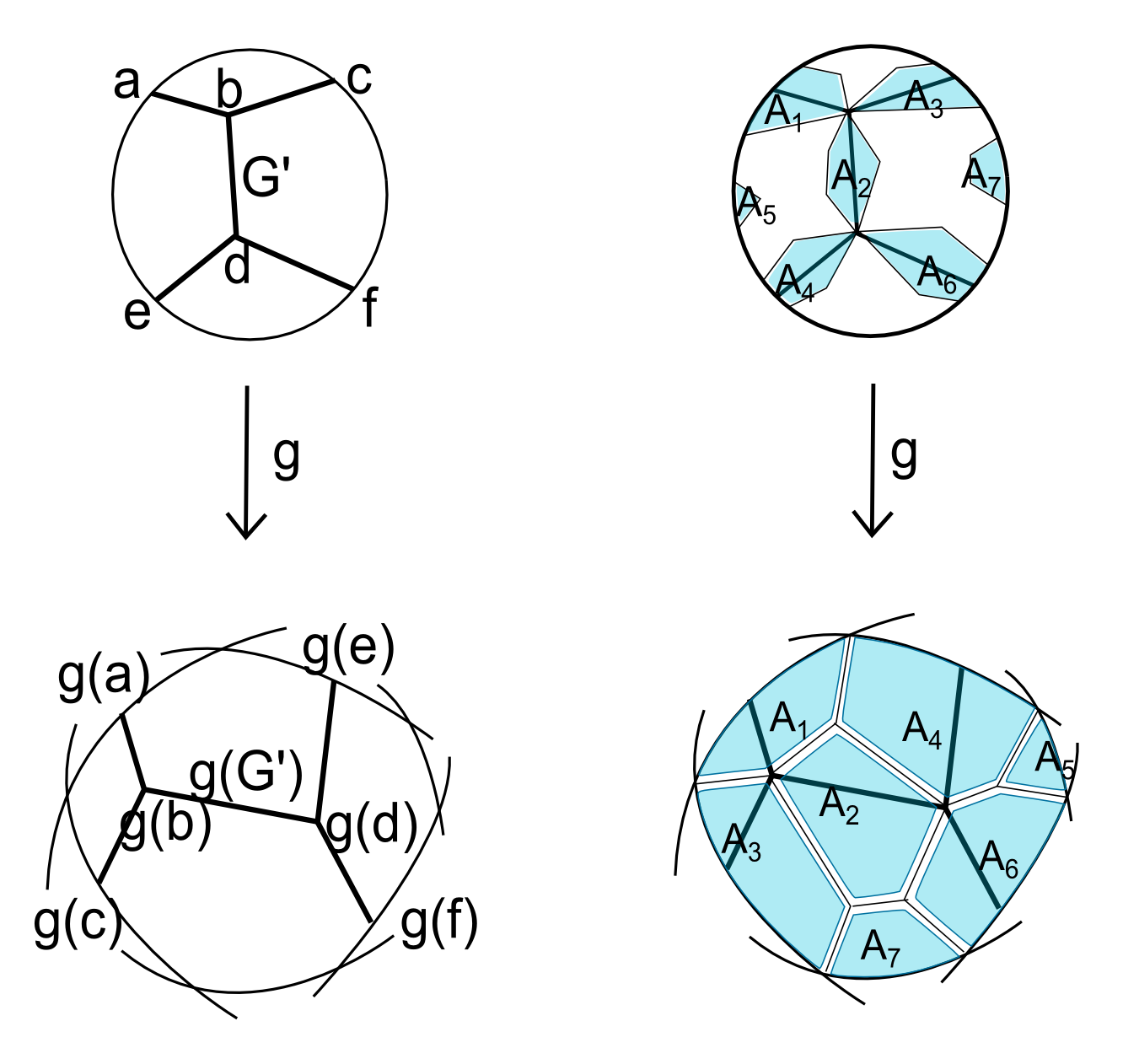 Figure 35
Figure 35 Figure 36
Figure 36