$k$-point semidefinite programming bounds for equiangular lines
David de Laat, Fabr\'icio Caluza Machado, Fernando M\'ario de Oliveira, Filho, Frank Vallentin

TL;DR
This paper introduces a hierarchy of $k$-point semidefinite programming bounds that extend existing bounds for spherical codes, enabling the computation of bounds for the maximum number of equiangular lines with fixed angles.
Contribution
It develops a new hierarchy of $k$-point bounds that generalize previous bounds and provides optimized methods to compute these bounds for higher points.
Findings
Successfully computed 4, 5, and 6-point bounds for equiangular lines.
Extended the existing bounds from 2-point and 3-point to higher points.
Enhanced the accuracy of bounds for equiangular lines in Euclidean space.
Abstract
We give a hierarchy of -point bounds extending the Delsarte-Goethals-Seidel linear programming -point bound and the Bachoc-Vallentin semidefinite programming -point bound for spherical codes. An optimized implementation of this hierarchy allows us to compute~, , and -point bounds for the maximum number of equiangular lines in Euclidean space with a fixed common angle.
Click any figure to enlarge with its caption.
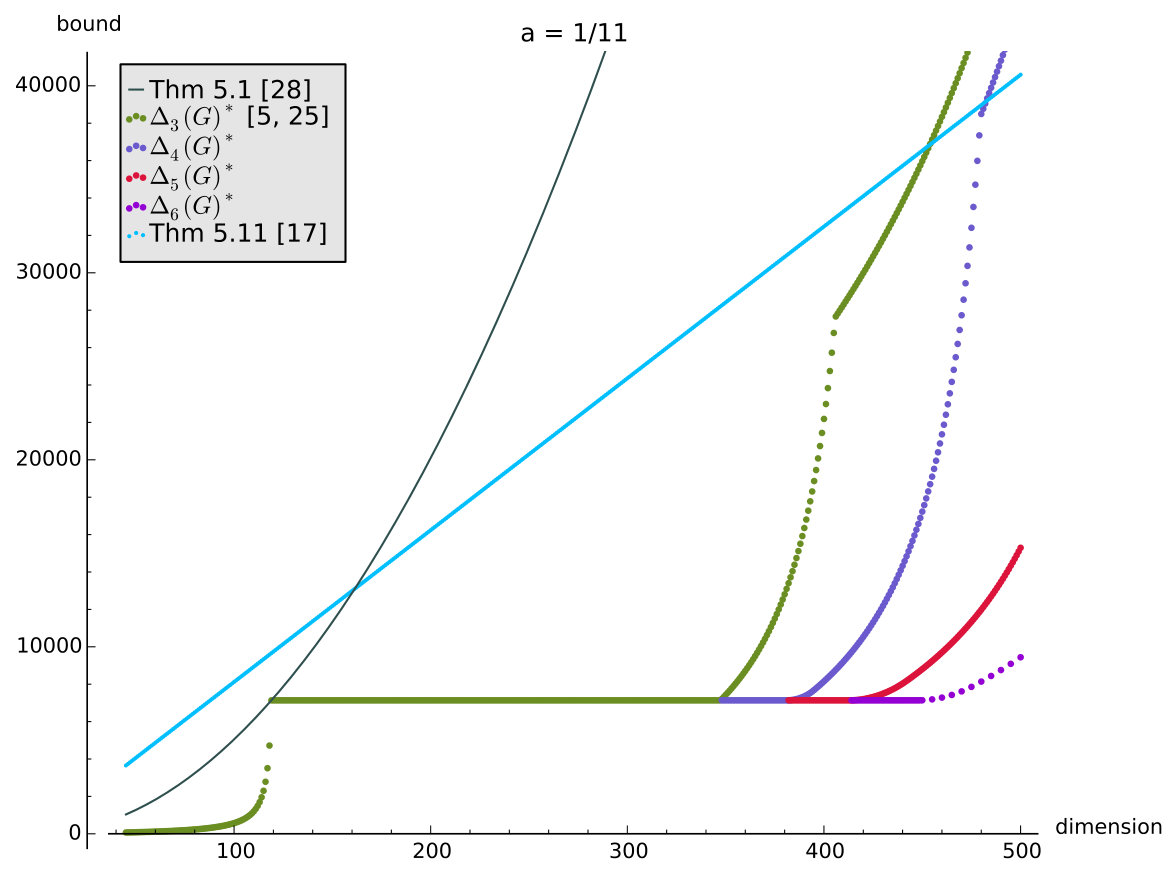 Figure 1
Figure 1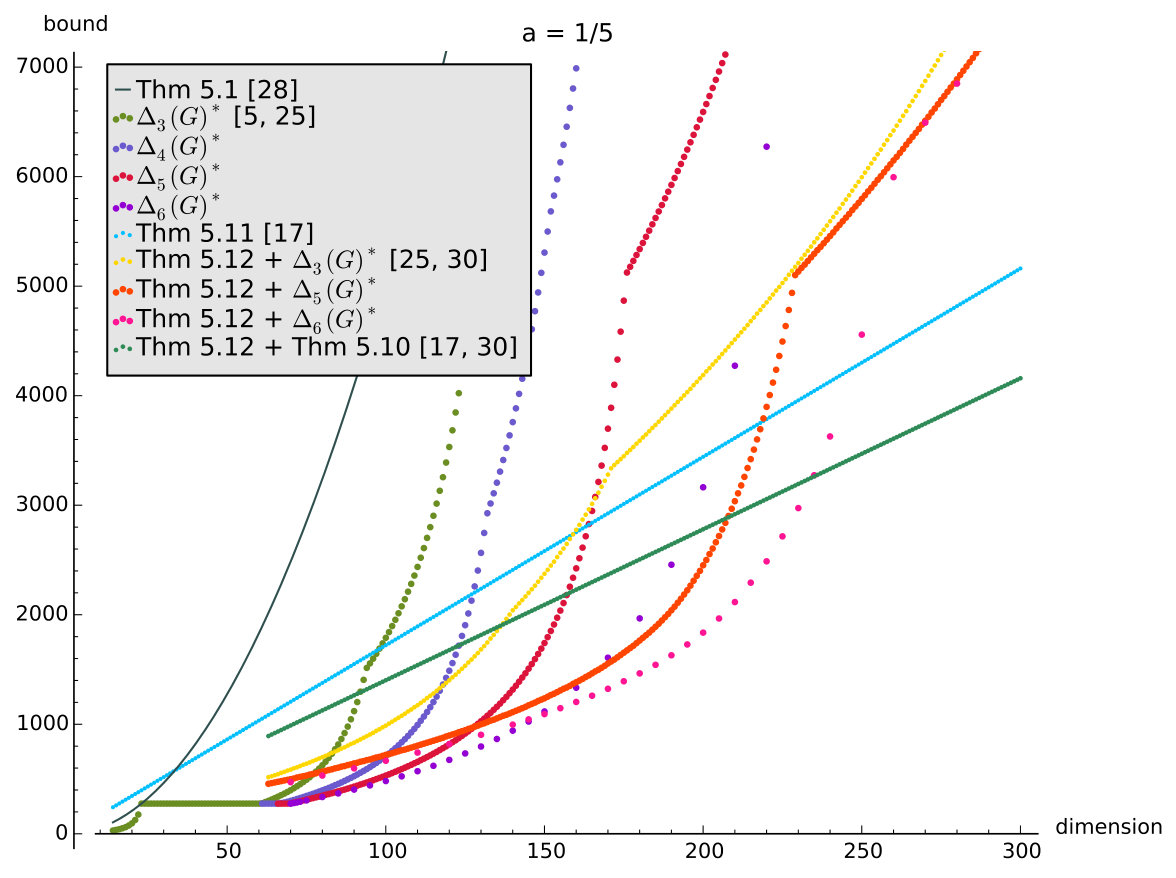 Figure 2
Figure 2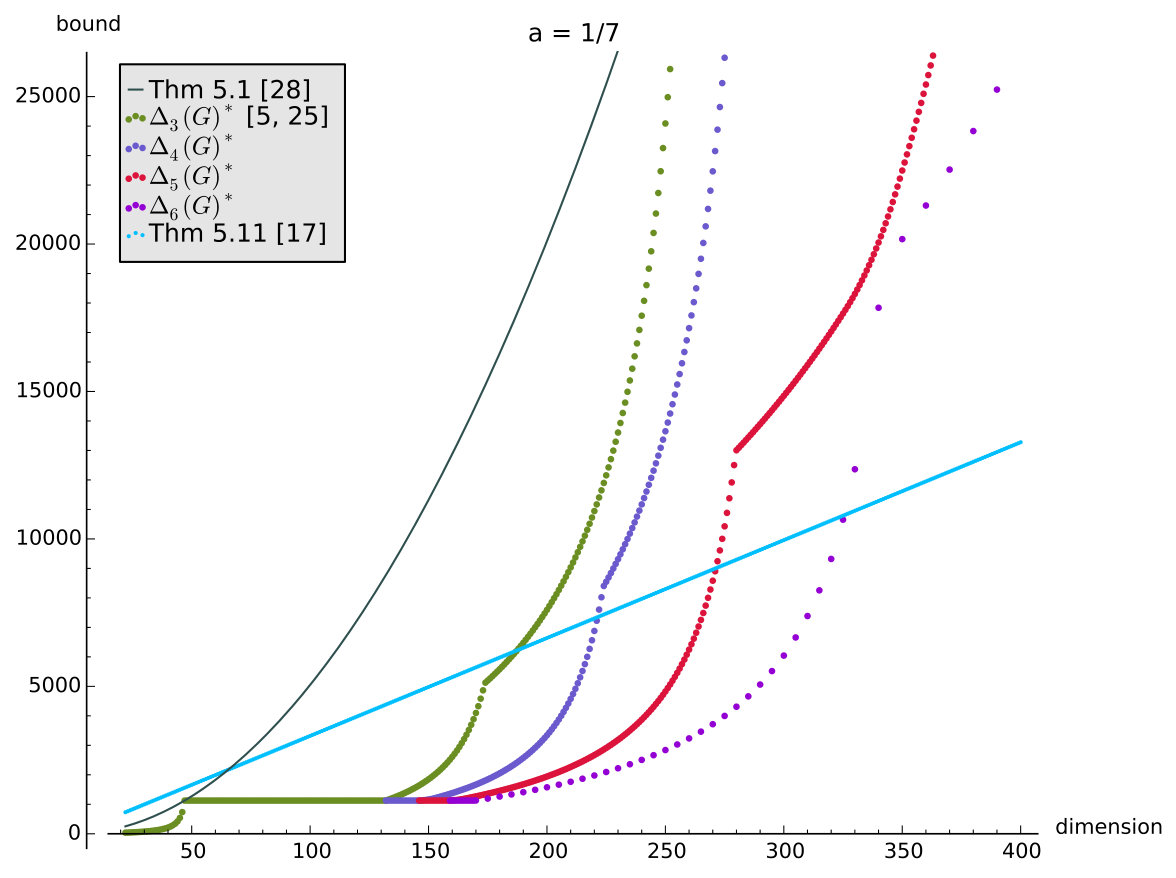 Figure 3
Figure 3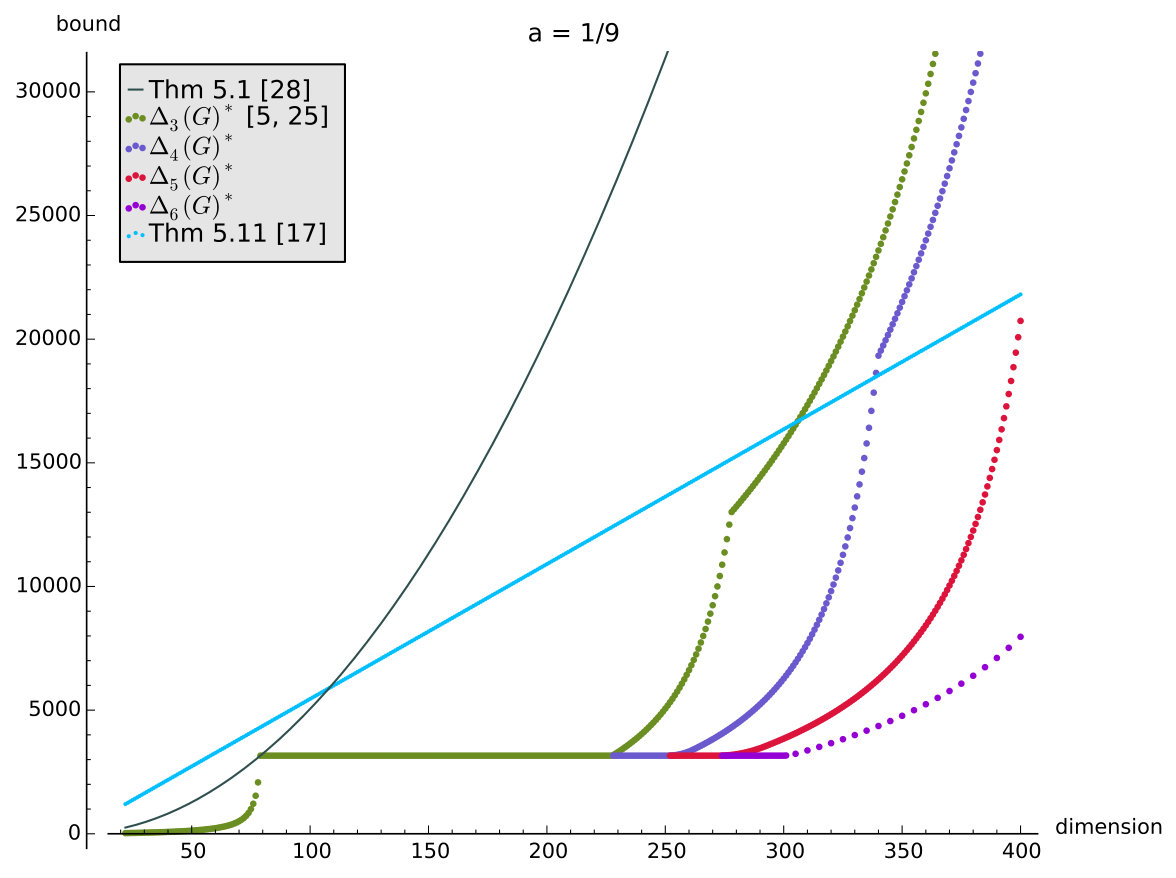 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
-point semidefinite programming bounds for equiangular lines
David de Laat
D. de Laat, Massachusetts Institute of Technology, Department of Mathematics, 77 Massachusetts Avenue, Simons building (Building 2), Room 2-241
,
Fabrício Caluza Machado
F.C. Machado, Instituto de Matemática e Estatística, Rua do Matão 1010, 05508-090 São Paulo/SP, Brazil.
,
Fernando Mário de Oliveira Filho
F.M. de Oliveira Filho, Delft Institute of Applied Mathematics, Delft University of Technology, Van Mourik Broekmanweg 6, 2628 XE Delft, The Netherlands.
and
Frank Vallentin
F. Vallentin, Mathematisches Institut, Universität zu Köln, Weyertal 86–90, 50931 Köln, Germany.
(Date: 16 November 2019)
Abstract.
We give a hierarchy of -point bounds extending the Delsarte-Goethals-Seidel linear programming -point bound and the Bachoc-Vallentin semidefinite programming -point bound for spherical codes. An optimized implementation of this hierarchy allows us to compute , , and -point bounds for the maximum number of equiangular lines in Euclidean space with a fixed common angle.
1991 Mathematics Subject Classification:
90C22, 52C99
D.d.L. was partially supported by NWO Rubicon grant 680-50-1528. F.C.M was supported by grant #2017/25237-4, from the São Paulo Research Foundation (FAPESP) and was financed in part by the Coordenação de Aperfeiçoamento de Pessoal de Nível Superior — Brasil (CAPES) — Finance Code 001. F.V. was partially supported by the SFB/TRR 191 “Symplectic Structures in Geometry, Algebra and Dynamics”, funded by the DFG. This project has received funding from the European Union’s Horizon 2020 research and innovation programme under the Marie Skłodowska-Curie agreement number 764759.
1. Introduction
Given , a subset of the unit sphere is a spherical -code if for all distinct , , where is the Euclidean inner product between and . The maximum cardinality of a spherical -code in is denoted by .
A fundamental tool for computing upper bounds for is the linear programming bound of Delsarte, Goethals, and Seidel [12]. If , then is the kissing number, the maximum number of pairwise nonoverlapping unit spheres that can touch a central unit sphere; the linear programming bound was one of the first nontrivial upper bounds for the kissing number.
The linear programming bound is the optimal value of a convex optimization problem. It is a -point bound, because it takes into account interactions between pairs of points on the sphere: pairs with correspond to constraints in the optimization problem. Bachoc and Vallentin [2] extended the linear programming bound to a -point bound by taking into account interactions between triples of points. The resulting semidefinite programming bound gives the best known upper bounds for the kissing number in dimensions , …, , except for dimension where the linear programming bound is sharp.
In this paper, we give a hierarchy of -point bounds that extend both the linear and semidefinite programming bounds. The parameter is the independence number of a topological packing graph, namely the infinite graph with vertex set in which two vertices and are adjacent if . The linear programming bound corresponds to an extension of the Lovász theta number to this infinite graph [1]. In Section 2, we derive our hierarchy from a generalization [11] of Lasserre’s hierarchy to the independent set problem in these topological packing graphs. The first level of our hierarchy is the Lovász theta number, and is therefore equivalent to the linear programming bound; the second level is the semidefinite programming bound, as shown in Section 4.2.
Though our hierarchy is not as strong, in theory, as Lasserre’s hierarchy, it is computationally less expensive. This allows us to use it to compute , , and -point bounds for the maximum number of equiangular lines with a certain angle, a problem that corresponds to the case . Aside from a previous result of de Laat [10], which uses Lasserre’s hierarchy directly, this is the first successful use of -point bounds for for geometrical problems; it yields improved bounds for the number of equiangular lines with given angles in several dimensions.
To perform computations, we transform the resulting problems into semidefinite programming problems. To this end, for a given we use a characterization of kernels on the sphere that are invariant under the action of the subgroup of the orthogonal group that stabilizes given points. For , this characterization was given by Schoenberg [40] and for , by Bachoc and Vallentin [2]; Musin [33] extended these two results for ; a similar result is given by Kuryatnikova and Vera [39].
Our hierarchy is particularly suited for problems like the equiangular lines problem, where is finite. Indeed, let be the set of all spherical -codes of cardinality at most , and let the orthogonal group act on by rotating each point in . The final semidefinite programming problem has one block corresponding to each orbit of under this action. So, if or is finite, then the number of orbits is finite and we get a finite semidefinite programming problem.
Still, a naive implementation of our approach would be too slow even to generate the problems for . The implementation available with the arXiv version of this paper was carefuly written to deal with the orbits of in an efficient way; this allows us to generate problems even for . This implementation could be of interest to others working on similar problems.
1.1. Equiangular lines
A set of equiangular lines is a set of lines through the origin such that every pair of lines defines the same angle. If this angle is , then such a set of equiangular lines corresponds to a spherical -code where and . So we are interested in finding for a given and also in finding the maximum number of equiangular lines with any given angle, namely
[TABLE]
The study of started with Haantjes [22] in 1948. He showed that and that the optimal configuration is a set of lines in the plane having a common angle of degrees. He also showed that ; the optimal configuration is given by the lines going through opposite vertices of a regular icosahedron, which have a common angle of degrees. These two constructions provide lower bounds; in both cases, Gerzon’s bound, which states that (see Theorem 5.1 below which is proven for example in Matoušek’s book [32, Miniature 9]), provides matching upper bounds.
In the setting of equiangular lines, the LP bound coincides with the relative bound (see Theorem 5.5). The -point SDP bound was first specialized to this setting by Barg and Yu [4]. Gijswijt, Mittelmann, and Schrijver [16] computed -point SDP bounds for binary codes and Litjens, Polak, and Schrijver [31] extended these -point bounds for -ary codes. For spherical codes, no -point bounds have been computed or formulated for .
Next to being fundamental objects in discrete geometry, equiangular lines have applications, for example in the field of compressed sensing: Only measurement matrices whose columns are unit vectors determining a set of equiangular lines can minimize the coherence parameter [15, Chapter 5].
In general, it is a difficult problem to determine for a given dimension . Currently, the first open case is dimension where it is known that is either or ; see Table 1. Sequence A002853 in The On-Line Encyclopedia of Integer Sequences [41] is .
2. Derivation of the hierarchy
Let be a graph. A subset of is independent if it does not contain a pair of adjacent vertices. The independence number of , denoted by , is the maximum cardinality of an independent set. For an integer , let be the set of independent sets in of size at most and be the set of independent sets in of size exactly .
Assume for now that is finite. We can obtain upper bounds for the independence number via the Lasserre hierarchy [27] for the independent set problem, whose -th step can be formulated as
[TABLE]
where is the matrix indexed by such that
[TABLE]
and means that is positive semidefinite. To produce an optimization program where the variables are easier to parameterize, we construct in two stages a weaker hierarchy with matrices indexed only by the vertex set of the graph. First, we modify the problem to remove from the domain of ; this gives the possibly weaker problem
[TABLE]
where is now considered as a matrix indexed by .
Second, we construct a weaker hierarchy by only requiring certain principal submatrices of to be positive semidefinite, an approach similar to the one employed by Gvozdenović, Laurent, and Vallentin [21]. For this we fix and, for each , define the matrix by
[TABLE]
and replace the condition ‘’ by ‘ for all ’. With these conditions we can restrict the support of to the set , obtaining the relaxation
[TABLE]
We extend this problem to infinite graphs in the same way that the Lasserre hierarchy is extended by de Laat and Vallentin [11]. This extension can be carried out for compact topological packing graphs; these are graphs whose vertex sets are compact Hausdorff spaces and in which every finite clique is contained in an open clique. The independence number of a compact topological packing graph is finite and , considered with the topology inherited from , is the disjoint union of the compact and open sets for , …, [11, Section 2].
The extension relies on the theory of conic optimization over infinite-dimensional spaces presented e.g. by Barvinok [6]. The first step is to introduce the spaces for the variables of our problem; we will use both the space of continuous real-valued functions on a compact space and its topological dual (with respect to the supremum norm) , the space of signed Radon measures.
In the infinite setting, the nonnegative variable from (1) becomes a measure in the dual of the cone of continuous and nonnegative functions, namely
[TABLE]
when is finite, can be identified with .
Let be the set of continuous real-valued functions on that are symmetric in the first two coordinates and let be the space of symmetric and signed Radon measures111A measure is symmetric if for all Borel sets , and .. A kernel is positive if for every finite the matrix \bigl{(}K(x,y)\bigr{)}_{x,y\in U} is positive semidefinite. A function is positive if for every the kernel is positive. The set of all positive functions in is a convex cone denoted by ; its dual cone is denoted by .
Define the operator by
[TABLE]
Note that, though the number of summands in (2) varies with the size of , the function is still continuous since, by the assumption that is a topological packing graph, can be written as the disjoint union of the compact and open subsets for , …, and is continuous in each of these parts. When is finite, is the adjoint of the operator that maps to the tuple of matrices \big{(}M_{Q}(\nu)\big{)}_{Q\in I_{k-2}}, since the inner product between and is equal to the inner product between and :
[TABLE]
So, when is finite, we may rewrite the constraints ‘ for all ’ from (1) as ‘’.
This last observation leads us naturally to the generalized -point bound. Indeed, when is a compact topological packing graph, since the number of summands in (2) is bounded by a constant depending only on , the operator is continuous. Thus it has an adjoint . Using the adjoint, we define the generalized -point bound for :
[TABLE]
For a finite graph with the discrete topology this reduces to (1).
Using the duality theory of conic optimization as described e.g. by Barvinok [6, Chapter IV], we can derive the following dual problem for (3):
[TABLE]
where and are the characteristic functions of and , which are continuous since is a topological packing graph. From now on, we will denote both the optimal value of (4) and the optimization problem itself by .
It is a direct consequence of weak duality that is an upper bound for the independence number of , but it is instructive to see a direct proof.
Proposition 2.1**.**
If is a compact topological packing graph, then .
Proof.
Let be a nonempty independent set and let be a feasible solution of . On the one hand, since , we have
[TABLE]
On the other hand, since , we have
[TABLE]
since, by the definition of , the matrices \bigl{(}T(x,y,Q)\bigr{)}_{x,y\in C} are positive semidefinite for all . Putting it all together we get . ∎
3. Parameterizing the variables by positive semidefinite matrices
Symmetry reduction plays a key role in the computation of via semidefinite programming. We now see how to exploit symmetry to parameterize the variable of (4) in terms of positive semidefinite matrices, an essential step in the solution of these optimization problems by computer.
3.1. Symmetry reduction
Let be a compact group that acts continuously on and that is a subgroup of the automorphism group222The automorphism group of a graph is the group of permutations that respect the adjacency relation, that is, and are adjacent if and only if and are adjacent. of the graph . The group acts coordinatewise on , and this action extends to an action on by
[TABLE]
The group acts continuously on by
[TABLE]
and hence it also acts on by
[TABLE]
If acts on a set , we denote by the set of elements of that are invariant under this action. In this way we write , , etc.
Given a feasible solution of , the pair with
[TABLE]
where we integrate against the Haar measure on normalized so that the total measure is 1, is also feasible with the same objective value. So we may assume that is invariant under the action of .
Let be a complete set of representatives of the orbits of . For , let be the stabilizer of with respect to and, for , let be a group element such that . When is finite, we can decompose the space as a direct sum of simpler spaces.
Proposition 3.1**.**
If is finite, then
[TABLE]
given by
[TABLE]
is an isomorphism that moreover preserves positivity, that is, if is such that is a positive kernel for each , then is positive.
Proof.
We first show that is homeomorphic to the coproduct
[TABLE]
which is the union of over all , endowed with the disjoint union topology. More precisely, we show that
[TABLE]
given by is such a homeomorphism with inverse
[TABLE]
Indeed, the map is well defined because for all in . For each , the map given by
[TABLE]
is continuous, as follows from the definition of quotient topology. By the definition of disjoint union topology on the coproduct this implies is continuous.
The map (5) is well defined, for if we replace by , where , then the right-hand side of (5) does not change. Direct verification shows and are the identity maps.
Since is finite, the domain of is compact. So is a continuous bijection between compact Hausdorff spaces, and hence a homeomorphism.
Now the proposition follows easily. Under the isomorphisms
[TABLE]
and
[TABLE]
the operator is equal to
[TABLE]
which is a well-defined isomorphism since is a homeomorphism. Finally, it follows directly from the definitions of positive kernels and that preserves positivity. ∎
The above proposition shows that to characterize we need to characterize the sets for . In the next section we give this characterization for the case of spherical symmetry.
3.2. Parameterizing invariant kernels on the sphere
From now on we assume is the graph where and where two distinct vertices , are adjacent if for some closed . Taking , we are in the situation described above. Let us see how to parameterize the cones
[TABLE]
by positive semidefinite matrices. For notational simplicity, we make the assumption that every consists of linearly independent vectors, which is true for all and considered in this paper.
Let be the standard basis of and fix . By rotating a set if necessary, we may assume that is contained in , where . The stabilizer subgroup of with respect to is isomorphic to the direct product of two groups, namely
[TABLE]
where is isomorphic to a finite subgroup of that acts on the first coordinates and acts on as a permutation of its elements and is a group isomorphic to that acts on the last coordinates.
If , then and . By a classical result of Schoenberg [40], each positive -invariant kernel is of the form
[TABLE]
for some nonnegative numbers , , … with absolute and uniform convergence, where is the Gegenbauer polynomial of degree in dimension normalized so that (equivalently, is the Jacobi polynomial with both parameters equal to ).
Kernels invariant under the stabilizer of one point were considered by Bachoc and Vallentin [2] and kernels invariant under the stabilizer of more points were considered by Musin [34]. The analogue of Schoenberg’s theorem for kernels invariant under the stabilizer of one or more points is stated in terms of multivariate Gegenbauer polynomials.
For , , and , , the multivariate Gegenbauer polynomial is the -variable polynomial
[TABLE]
where . If we use the convention , then . Since the Gegenbauer polynomials are odd or even according to the parity of , the function is indeed a polynomial in the variables , , and . Musin [34] denotes by and Bachoc and Vallentin [2] denote by .
Fix , let be a basis of the space of -variable polynomials of degree at most (e.g. the monomial basis), and write for the column vector containing the polynomials in evaluated at . Let be the matrix of polynomials
[TABLE]
The choice of makes a matrix with -variable polynomials of degree at most as its entries.
Given a matrix with linearly independent columns, set , where is the matrix such that is the Cholesky factorization of , which is unique since is positive definite. For each , fix a matrix whose columns are the vectors of in some order. The rows of span the same space as the columns of because is invertible, and by construction the rows of are orthonormal:
[TABLE]
Therefore, for , is a vector with the coordinates of the projection of onto with respect to an orthonormal basis of the linear span.
The following theorem is a restatement of a result of Musin [34, Corollary 3.2] in terms of invariant kernels and with adapted notation. We will use only the sufficiency part of the statement, proved in Appendix A for completeness.
For square matrices , of the same dimensions, write for their trace product.
Theorem 3.2**.**
Let with and let be a matrix whose columns are the vectors of in some order. Fix and, for each , let be a positive semidefinite matrix of size . Then given by
[TABLE]
is a positive, continuous, and -invariant kernel. Conversely, every -invariant kernel can be uniformly approximated by kernels of the above form.
Theorem 3.2 gives us a parameterization of -invariant kernels. To get a parameterization of -invariant kernels we still have to deal with the symmetries in . By construction, for an orthogonal matrix there is a permutation matrix such that . Since and , the elements of correspond precisely to the symmetries of the Gram matrix under simultaneous permutations of rows and columns. Indeed, if the Gram matrix is invariant under a certain simultaneous permutation of rows and columns, then since is linearly independent, this permutation defines a linear transformation of that preserves all inner products between vectors of , whence it is orthogonal and therefore corresponds to an element of . This observation leads to the following corollary.
Corollary 3.3**.**
Let with and let be a matrix whose columns are the vectors of in some order. Fix and, for each , let be a positive semidefinite matrix of size . Then given by
[TABLE]
where
[TABLE]
is a positive, continuous, and -invariant kernel.
Proof.
If is given by (7), then by writing
[TABLE]
we see using Theorem 3.2 that is a sum of positive, continuous, and -invariant kernels, and hence it is itself positive, continuous, and -invariant.
Since, for every ,
[TABLE]
(recall is the Cholesky decomposition of ), and since , we have that
[TABLE]
where
[TABLE]
Now it follows directly from (8) that is -invariant. ∎
4. Semidefinite programming formulations
Before giving the semidefinite programming formulations, let us discuss how the matrix-valued function can be computed. We have
[TABLE]
where is the Cholesky decomposition of . This shows that depends only on the inner products between the vectors in the set and on the ordering of the columns of . Since the size of is bounded by , this also shows that all computations for setting up the problem can be done in a relatively small dimension depending on and not on .
4.1. An SDP formulation for spherical finite-distance sets
To write the full semidefinite programming formulation corresponding to (4), we use Corollary 3.3 together with the isomorphism from Proposition 3.1. Let denote the cone of positive semidefinite matrices. If for and we have , where , then given by
[TABLE]
is a function in and hence, for , the expression for becomes
[TABLE]
Since the action of on is transitive, the quotient has only one element. We set , where is the first canonical basis vector of . We replace the objective in (4) by , which we can further simplify by noticing that is the all-ones matrix of size and is the zero matrix for . This gives the semidefinite programming formulation
[TABLE]
For each fixed this gives an upper bound for that converges to as tends to infinity.
4.2. A precise connection between the Bachoc-Vallentin bound
and the Lasserre hierarchy
The bound immediately reduces to the generalization of the Lovász number as given by Bachoc, Nebe, Oliveira, and Vallentin [1], which coincides with the LP bound [12] after symmetry reduction. Here we show that can be interpreted as a nonsymmetric version of the Bachoc-Vallentin -point bound [2].
Suppose is feasible for . If with , then
[TABLE]
By using and
[TABLE]
we see that
[TABLE]
where we use the notation , in which runs through the group of all permutations of three variables and acts on by permuting its arguments.
If , say , then
[TABLE]
Using the above expressions we see that the constraints for and for in are exactly the ones that appear in Theorem 4.2 of Bachoc and Vallentin [2]. Except for the presence of an ad hoc matrix variable that comes from a separate argument, both bounds are identical.
Remark 4.1*.*
Recall that for our method it is essential that be finite and that can be represented by the set of positive semidefinite matrices of rank at most with ones in the diagonal and elements of elsewhere, up to simultaneous permutations of the rows and columns. So is finite for , , but infinite whenever is infinite and . This explains why it is not clear how to compute a -point bound generalization of the LP [12] and SDP [2] bounds for the size of spherical codes with given minimal angular distance. For the spherical finite-distance problem, however, the set is always finite, so that we can perform computations beyond .
5. Two-distance sets and equiangular lines
If for some , then the vectors in a spherical -code correspond to a set of equiangular lines with common angle . We set
[TABLE]
and write
[TABLE]
for the maximum number of equiangular lines in with any common angle.
A semidefinite programming bound based on the method of Bachoc and Vallentin [2], and hence equivalent to , was applied to this problem by Barg and Yu [5] (see also the table computed by King and Tang [25]) which, together with previous results, determines for most .
Barg and Yu present [4, Eqs. (14)–(17)] a semidefinite programming formulation that corresponds exactly to the formulation given in Section 4.1 when (except for an ad hoc matrix). In the other papers [5, 25, 38, 45] where this semidefinite program is considered, a primal version is given instead, which is less convenient from the perspective of rigorous verification of bounds.
In this paper we compute new upper bounds for for , , , and and many values of using with , , and . The results do not improve the known bounds for but greatly improve the known bounds for for certain ranges of dimensions; these results are presented in Section 5.2.
5.1. Overview of the literature
The literature on equiangular lines is vast; here is a summary.
5.1.1. Bounds for
The interest in started with Haantjes [22], who showed in 1948. Since then, much progress has been made using different techniques, and has been determined for many values of . Table 1 presents the known values for for small dimensions.
The most general bound for , called the absolute bound, is due to Gerzon:
Theorem 5.1** (Gerzon, cf. Lemmens and Seidel [28]).**
We have
[TABLE]
Moreover, if equality holds, then , , or for some odd integer and the cosine of the common angle is .
The four cases where it is known that the bound is attained are , , , and . Delsarte, Goethals and Seidel [12, Example 8.3] show that equality holds if and only if the union of the code with its antipodal code is a tight spherical 5-design, and in this case Cohn and Kumar [9] show this union is a universally optimal code (which means it minimizes every completely monotonic potential function in the squared chordal distance). Bannai, Munemasa, and Venkov [3] and Nebe and Venkov [36] show that there are infinitely many odd integers for which no tight spherical 5-design exists in with , so that Gerzon’s bound cannot be attained in those dimensions. This list starts with , , , , , , , , , , , … (resp. , , , , , , , , , , , …). For the remaining possible dimensions, attainability is an open problem.
For the dimensions that are not of the form for some odd integer , the absolute bound can be improved:
Theorem 5.2** **(Glazyrin and Yu [17] and King and
Tang [25]).
Let be the unique odd integer such that . Then,
[TABLE]
Furthermore, if the bound is attained, then the cosine of the angle between the lines is for the first case and for the second.
Glazyrin and Yu also proved another theorem [17, Theorem 4] about the codes that attain the bound from Theorem 5.2:
Theorem 5.3** (Glazyrin and Yu [17]).**
Suppose is a positive odd integer. If is a -spherical code of size contained in with , then must belong to a -dimensional subspace.
Since for , this last theorem implies that if the second bound from Theorem 5.2 is attained, then Gerzon’s bound also has to be attained for . For the first two cases where tight spherical 5-designs do not exist, this implies for and for . The following theorem is adapted from Larman, Rogers, and Seidel [26, Theorem 2]:
Theorem 5.4** (Larman, Rogers, and Seidel [26]).**
We have
[TABLE]
where is the largest odd integer such that .
Most of the results for rely on Theorem 5.4, which shows that to bound one just has to consider finitely many angles. This motivates the consideration of when is an odd integer.
5.1.2. Bounds for
Bounds for fixed are known as relative bounds, as opposed to Gerzon’s absolute bound from Theorem 5.1. The first relative bound is due to van Lint and Seidel [43]:
Theorem 5.5** (van Lint and Seidel [43]).**
If , then
[TABLE]
As shown by Glazyrin and Yu [17, Theorem 5], Theorem 5.5 can be derived from the positivity of the Gegenbauer polynomials , and indeed this is the bound given by the semidefinite programming techniques when . This bound is also the first case of Theorem 5.2.
After computing the semidefinite programming bound for many values of and , Barg and Yu [5] observed long ranges where the bound remained stable, matching Gerzon’s bound (Theorem 5.1) at . Based on this observation, Yu [45] proved the following theorem:
Theorem 5.6** (Yu [45]).**
If and , then
[TABLE]
An alternative proof for the previous theorem is given by Glazyrin and Yu [17, Theorem 6], where the use of the positivity of the Gegenbauer polynomials and is made more explicit. The bounds given by the semidefinite programming method were also used to prove the following theorem:
Theorem 5.7** (Okuda and Yu [38]).**
If , then
[TABLE]
The bounds from Theorems 5.5, 5.6, and 5.7 coincide with the values given by the semidefinite programming formulation when (see the points labeled “ [5, 25]” in Figures 1–4). Another source of relative bounds is a technique called pillar decomposition, introduced by Lemmens and Seidel [28] and used to determine :
Theorem 5.8** (Lemmens and Seidel [28]).**
If , then
[TABLE]
For , they obtained results that lead to the following conjecture:
Conjecture 5.9** **(Lemmens and
Seidel [28]).
We have
[TABLE]
Note that is the bound given by Theorem 5.6 when and this shows (together with the fact that there exists a -code of size in dimension ) that the conjecture is true for . In fact, the semidefinite programming bound computed by Barg and Yu [5] also shows . Neumaier [37] (see also [19, Corollary 6.6]) proved that there exists a large such that for all . Neumaier claimed, without a proof, that should be at most .
Recently, Lin and Yu [30] made progress in this conjecture by proving some claims from Lemmens and Seidel [28]. The only case still open is when the code has a set with unit vectors with mutual inner products and no such set with unit vectors (up to replacement of some vectors by their antipodes).
Glazyrin and Yu [17] introduced a new method to derive upper bounds for spherical finite-distance sets. By using Gegenbauer polynomials together with the polynomial method, they proved a theorem that, specialized for two-distance sets, is:
Theorem 5.10** (Glazyrin and Yu [17]).**
For all , , and , we have
[TABLE]
whenever the right-hand side is positive.
With this result, they proved the following relative bound, which provides the best bounds for moderately large values of (see Figures 2–4):
Theorem 5.11** (Glazyrin and Yu [17]).**
If , then
[TABLE]
King and Tang [25] improved the pillar decomposition technique and got a better bound for [25, Theorem 7]. Recently, Lin and Yu [30] further improved parts of their argument; by combining [30, Proposition 4.5] with the proof of [25, Theorem 7] we get:
Theorem 5.12** (Lin and Yu [30]).**
If , then
[TABLE]
The previous results give three competing methods to bound , each one being the best for a different range of dimensions. One can either use semidefinite programming to bound directly, use Theorem 5.12 together with semidefinite programming to bound A\big{(}n-4,\{1/13,-5/13\}\big{)}, or use Theorem 5.10. King and Tang [25] made this comparison, computing the semidefinite programming bound . See in Table 3 and in Figure 1 the comparison with the new semidefinite programming bound .
Regarding asymptotic results, while it is known that is asymptotically quadratic in , for fixed we have that is linear in . Bukh [8] was the first to show a bound for of the form , although with a large constant . Theorem 5.11 has another linear bound good to give results for intermediate values of , while the best asymptotic result is due to Jiang et al. [23]. They completely settled the value of for every in terms of a parameter called the spectral radius order , which is defined for as the smallest integer so there exists a graph with vertices and adjacency matrix with largest eigenvalue exactly , and is defined in case no such graph exists.
Theorem 5.13** (Jiang et al. [23]).**
Fix . Let and be its spectral radius order. The maximum number of equiangular lines in with common angle satisfies
- (a)
* for all sufficiently large if .* 2. (b)
* as if .*
Jiang et al. remarks that the from their theorem may be really big, though. When for some positive integer , then and (since the complete graph on vertices has spectral radius ). Theorem 5.13 confirms a conjecture made by Bukh [8]:
Corollary 5.14** (Jiang et al. [23]).**
If for some positive integer , then for all sufficiently large,
[TABLE]
There is a simple construction that achieves the value from Corollary 5.14. Let for some positive integer and be arbitrary positive integers. Then one can show that a matrix with diagonal blocks, each of size , and diagonal blocks of size , with diagonal entries equal to 1, off-diagonal entries inside each block equal to , and all other entries equal to is the Gram matrix of a -code in of size . Letting and we get the desired size.
5.2. New semidefinite programming bounds
As observed in Section 5, the semidefinite programming bounds computed by Barg and Yu [5] and King and Tang [25] correspond to . In this paper we compute new upper bounds for for , , , and and many values of using , , and . We always use degree for the polynomials since, as reported by Barg and Yu [4], no improvement is observed for larger values of (but this may change if sets with cardinality greater than are considered). The semidefinite programs were produced using a script written in Julia [7] using Nemo [14], were solved with SDPA-GMP [35], and the results were rigorously verified using the interval arithmetic library Arb [24]. The rigorous verification procedure is much simpler than that for similar problems [13]. The scripts used to generate the programs and verify the results can be found with the arXiv version of this paper.
The results are presented in Figures 1–4 and Tables 3–6, where we compile the bounds for for each that is a multiple of ; the best bounds are displayed in boldface. While it takes only a few seconds to generate and solve a single instance of the semidefinite programming problem for , the process takes about 5 days using a single core of an Intel i7-8650U processor for ; that is why the tables have some missing values for .
No improvements were obtained for ; we observed in this case that which is equal to the values given by Theorems 5.5 and 5.6. Since this is the range of dimensions that influences , no improvements for were obtained. We obtained great improvements for all dimensions , making the semidefinite programming bound competitive with the other methods (like Theorem 5.11) for more dimensions. Asymptotically, the semidefinite programming bounds behave badly, loosing even to Gerzon’s bound.
In particular, we improved the range of dimensions for which the bound remains stable, showing that from Theorem 5.6 is not optimal. Table 2 shows how much this range is increased for the values of considered. This observation motivates the following two questions, where is such that is an odd integer:
- (1)
What is the smallest such that ? 2. (2)
What is the smallest such that ?
Question (1) is the more interesting of the two since if the smallest is , then Gerzon’s bound is attained. Theorem 5.3 makes progress in this direction, showing that Gerzon’s bound is also attained if the smallest is at most ; this is known not to be the case for many (due to the nonexistence of some tight spherical 5-designs, as mentioned after Theorem 5.1), which implies for and for . Table 2 also suggests that the constraint in Theorem 5.3 may not be optimal.
Question (2) seems interesting because Table 2 shows that is not a good candidate solution. In fact, the smallest is likely much larger, as suggested by Conjecture 5.9 for and the construction described after Corollary 5.14. Using this construction, we know that is achieved when , which corresponds to the dimensions , , , and for , , , and respectively.
We also improve the bounds computed by King and Tang [25] for by replacing their theorem [25, Theorem 7] by Theorem 5.12 and by using to compute better bounds for . Lin and Yu [30] observed that and therefore there is a limit to the power of this approach: it will never be able to prove Conjecture 5.9 no matter how much we increase . In general, it is not clear how good the bound can be for if one allows to increase; in contrast, de Laat and Vallentin [11, Theorem 2] show that their version of the Lasserre hierarchy for compact topological packing graphs converges to the independence number if enough steps are computed. Whether such a convergence result holds for is an open question; in any case, it takes days to compute for , so one can expect that solving the resulting semidefinite programs for will be hard in practice.
Appendix A Proof of the sufficiency part of Theorem 3.2
We now prove, for the sake of completeness, a theorem that, together with the linear transformation used to compute the coordinates of the projection of a vector with respect to an orthonormal basis of , amounts to the sufficiency part of Theorem 3.2, which is the direction used in this paper. It is a restatement of a proposition of Musin [34, Corollary 3.1].
Recall that is the Gegenbauer polynomial of degree in dimension normalized so that . For , , and , , the multivariate Gegenbauer polynomial is the -variable polynomial
[TABLE]
where . If we use the convention , then . Fix , let be a basis of the space of -variable polynomials of degree at most (e.g. the monomial basis), and write for the column vector containing the polynomials of evaluated at . The matrix is the matrix of polynomials
[TABLE]
Theorem A.1** (Musin [34]).**
Let with and let be an matrix whose rows form an orthonormal basis for . Fix and, for each , let be a positive semidefinite matrix of size . Then given by
[TABLE]
is a positive, continuous, and -invariant kernel.
First we prove that the multivariate Gegenbauer polynomials satisfy the following positivity property [34, Theorem 3.1].
Proposition A.2** (Musin [34]).**
For , let be an matrix whose rows form an orthonormal set in and be a finite subset of . Then, for every nonnegative integer , the matrix \big{(}P_{l}^{n,m}(x\cdot y,Ex,Ey)\big{)}_{x,y\in C} is positive semidefinite.
Proof.
If then all polynomials evaluate to and the proposition holds, so we assume . Let be the space spanned by the rows of and be a unit vector in . For each , write with and . If , then let , otherwise write . If , , then
[TABLE]
Since the rows of are orthonormal, we have and hence .
If, say, , then , while is also [math] as can be seen from (9) since .
Now is contained in an embedding of into and by Schoenberg’s theorem [40] we have that \big{(}P_{l}^{n-m}(\bar{x}\cdot\bar{y})\big{)}_{x,y\in C} is positive semidefinite. Since \big{(}\|x_{2}\|^{l}\|y_{2}\|^{l}\big{)}_{x,y\in C} is positive semidefinite, so is \big{(}\|x_{2}\|^{l}\|y_{2}\|^{l}P_{l}^{n-m}(\bar{x}\cdot\bar{y})\big{)}_{x,y\in C}, and we are done. ∎
Proof of Theorem A.1.
Since all entries of are polynomials, is continuous, and since , , and are invariant under the action of on , is invariant. To prove positivity, let be a finite subset of and be a function. We have
[TABLE]
To show this quantity is nonnegative, we will show that for all , …, the matrix \sum_{x,y\in C}w_{x}w_{y}Y_{l}^{n,m}\big{(}x\cdot y,Ex,Ey\big{)} is positive semidefinite. For this, write it as a product of matrices: if is the matrix whose columns are given by for , then
[TABLE]
and, since the matrix \big{(}P_{l}^{n,m}(x\cdot y,Ex,Ey)\big{)}_{x,y\in C} is positive semidefinite by Proposition A.2, we are done. ∎
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] Christine Bachoc, Gabriele Nebe, Fernando M. de Oliveira Filho, and Frank Vallentin. Lower bounds for measurable chromatic numbers. Geom. Funct. Anal. , 19(3):645–661, 2009.
- 2[2] Christine Bachoc and Frank Vallentin. New upper bounds for kissing numbers from semidefinite programming. J. Amer. Math. Soc. , 21(3):909–924, 2008.
- 3[3] Eiichi Bannai, Akihiro Munemasa, and Boris Venkov. The nonexistence of certain tight spherical designs. Algebra i Analiz , 16(4):1–23, 2004.
- 4[4] Alexander Barg and Wei-Hsuan Yu. New bounds for spherical two-distance sets. Exp. Math. , 22(2):187–194, 2013.
- 5[5] Alexander Barg and Wei-Hsuan Yu. New bounds for equiangular lines. In Discrete geometry and algebraic combinatorics , volume 625 of Contemp. Math. , pages 111–121. Amer. Math. Soc., Providence, RI, 2014.
- 6[6] Alexander Barvinok. A course in convexity , volume 54 of Graduate Studies in Mathematics . American Mathematical Society, Providence, RI, 2002.
- 7[7] Jeff Bezanson, Alan Edelman, Stefan Karpinski, and Viral B. Shah. Julia: a fresh approach to numerical computing. SIAM Rev. , 59(1):65–98, 2017.
- 8[8] Boris Bukh. Bounds on equiangular lines and on related spherical codes. SIAM J. Discrete Math. , 30(1):549–554, 2016.