SocioSense: Robot Navigation Amongst Pedestrians with Social and Psychological Constraints
Aniket Bera, Tanmay Randhavane, Rohan Prinja, Dinesh Manocha

TL;DR
SocioSense is a real-time robot navigation algorithm that uses psychological and social constraints to predict pedestrian behavior and navigate safely in crowds.
Contribution
The paper introduces SocioSense, a novel algorithm combining Bayesian learning and personality theory for socially-aware robot navigation.
Findings
Improves long-term path prediction accuracy by 21%.
Effective in simulated environments with multiple pedestrians.
Integrates psychological traits for better human-robot interaction.
Abstract
We present a real-time algorithm, SocioSense, for socially-aware navigation of a robot amongst pedestrians. Our approach computes time-varying behaviors of each pedestrian using Bayesian learning and Personality Trait theory. These psychological characteristics are used for long-term path prediction and generating proximic characteristics for each pedestrian. We combine these psychological constraints with social constraints to perform human-aware robot navigation in low- to medium-density crowds. The estimation of time-varying behaviors and pedestrian personalities can improve the performance of long-term path prediction by 21%, as compared to prior interactive path prediction algorithms. We also demonstrate the benefits of our socially-aware navigation in simulated environments with tens of pedestrians.
Click any figure to enlarge with its caption.
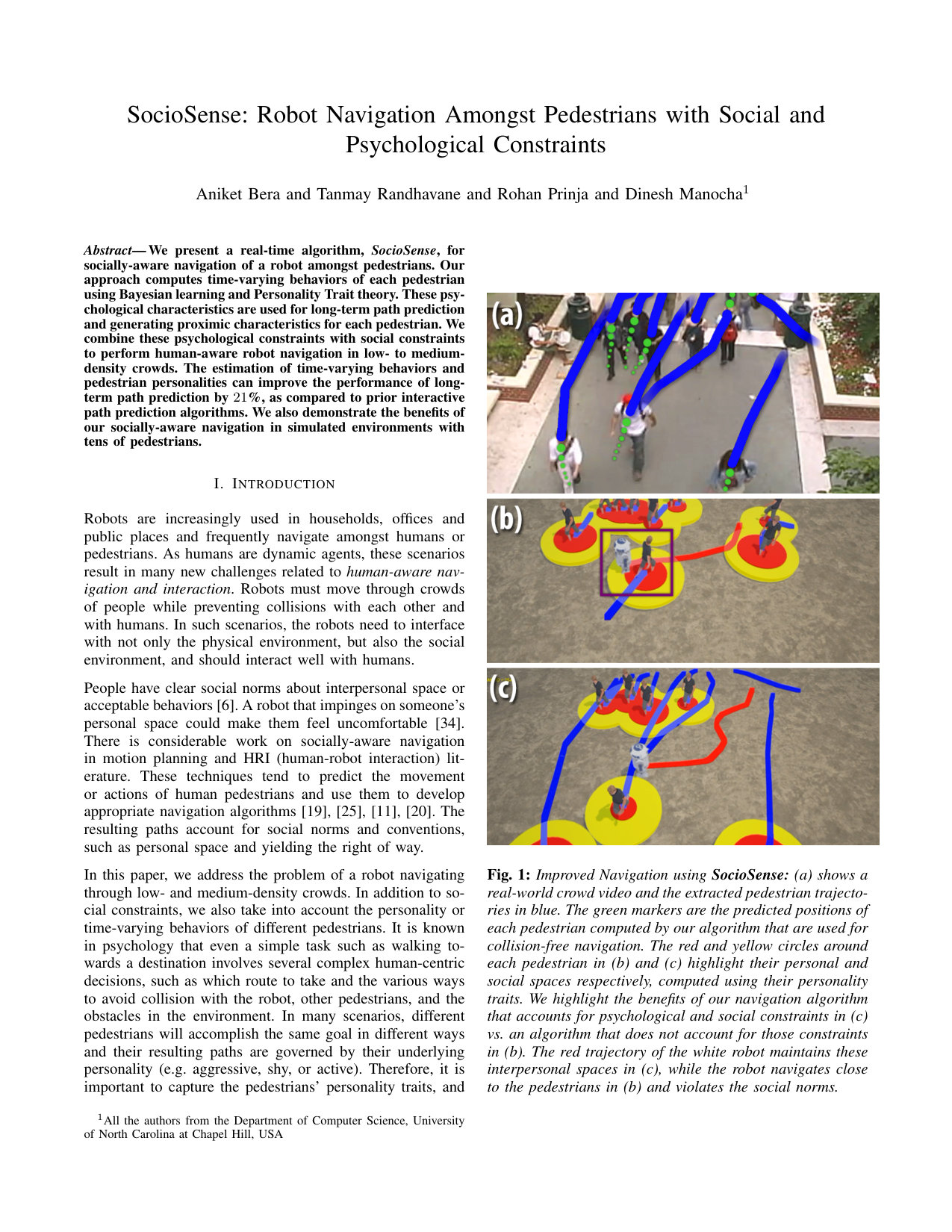 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
See pages 1-last of aniket.pdf