View-invariant Gait Recognition through Genetic Template Segmentation
Ebenezer Isaac, Susan Elias, Srinivasan Rajagopalan, K.S. Easwarakumar

TL;DR
This paper introduces a genetic algorithm-based method for automating the segmentation of gait templates, improving view-invariant gait recognition performance by effectively isolating key body regions.
Contribution
The proposed genetic template segmentation (GTS) automates boundary selection in gait templates, enhancing recognition accuracy over manual methods.
Findings
GEI template segmentation yields the best results.
GTS significantly outperforms existing view-invariant gait recognition methods.
Automated segmentation improves robustness against covariates.
Abstract
Template-based model-free approach provides by far the most successful solution to the gait recognition problem in literature. Recent work discusses how isolating the head and leg portion of the template increase the performance of a gait recognition system making it robust against covariates like clothing and carrying conditions. However, most involve a manual definition of the boundaries. The method we propose, the genetic template segmentation (GTS), employs the genetic algorithm to automate the boundary selection process. This method was tested on the GEI, GEnI and AEI templates. GEI seems to exhibit the best result when segmented with our approach. Experimental results depict that our approach significantly outperforms the existing implementations of view-invariant gait recognition.
Click any figure to enlarge with its caption.
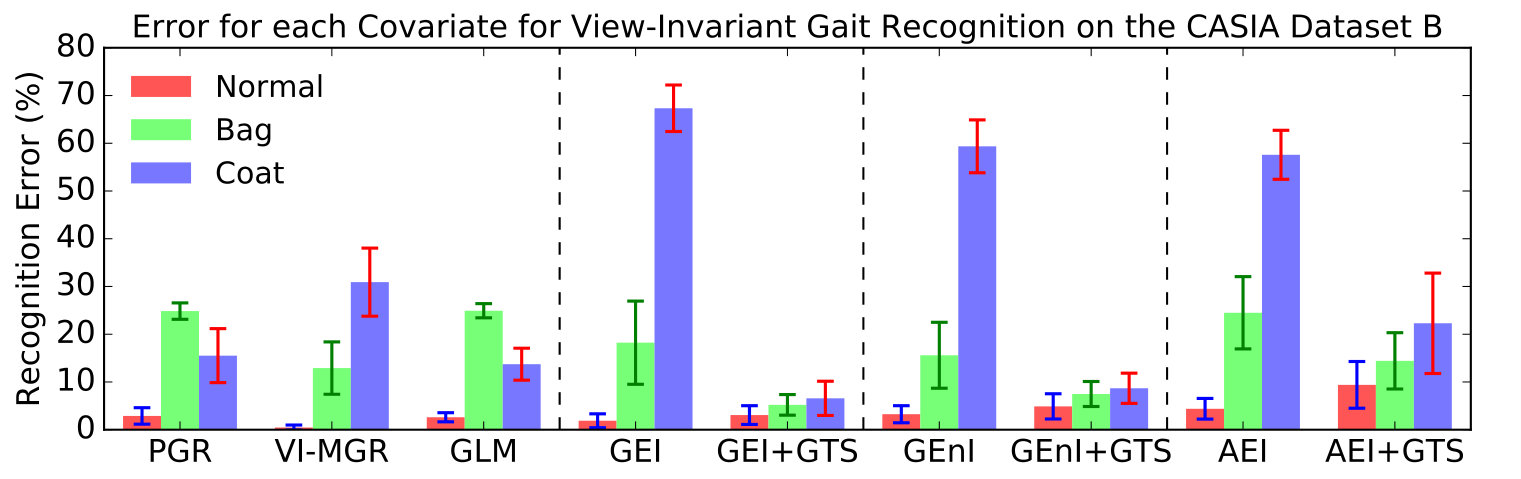 Figure 1
Figure 1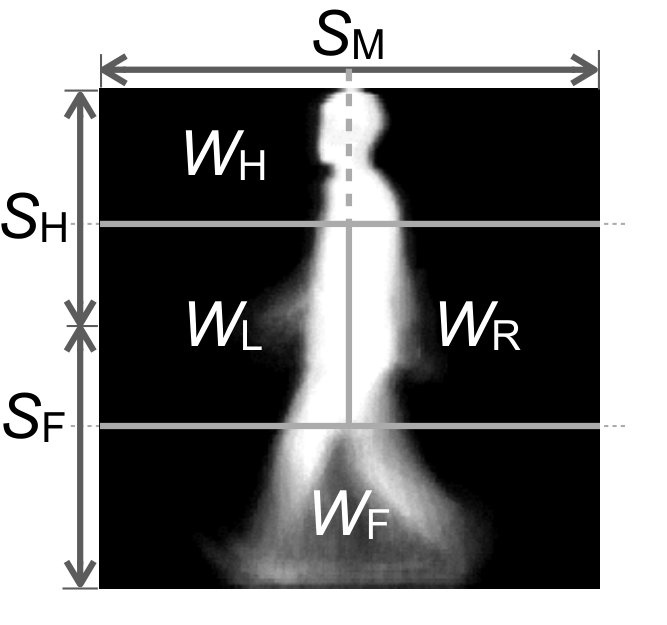 Figure 2
Figure 2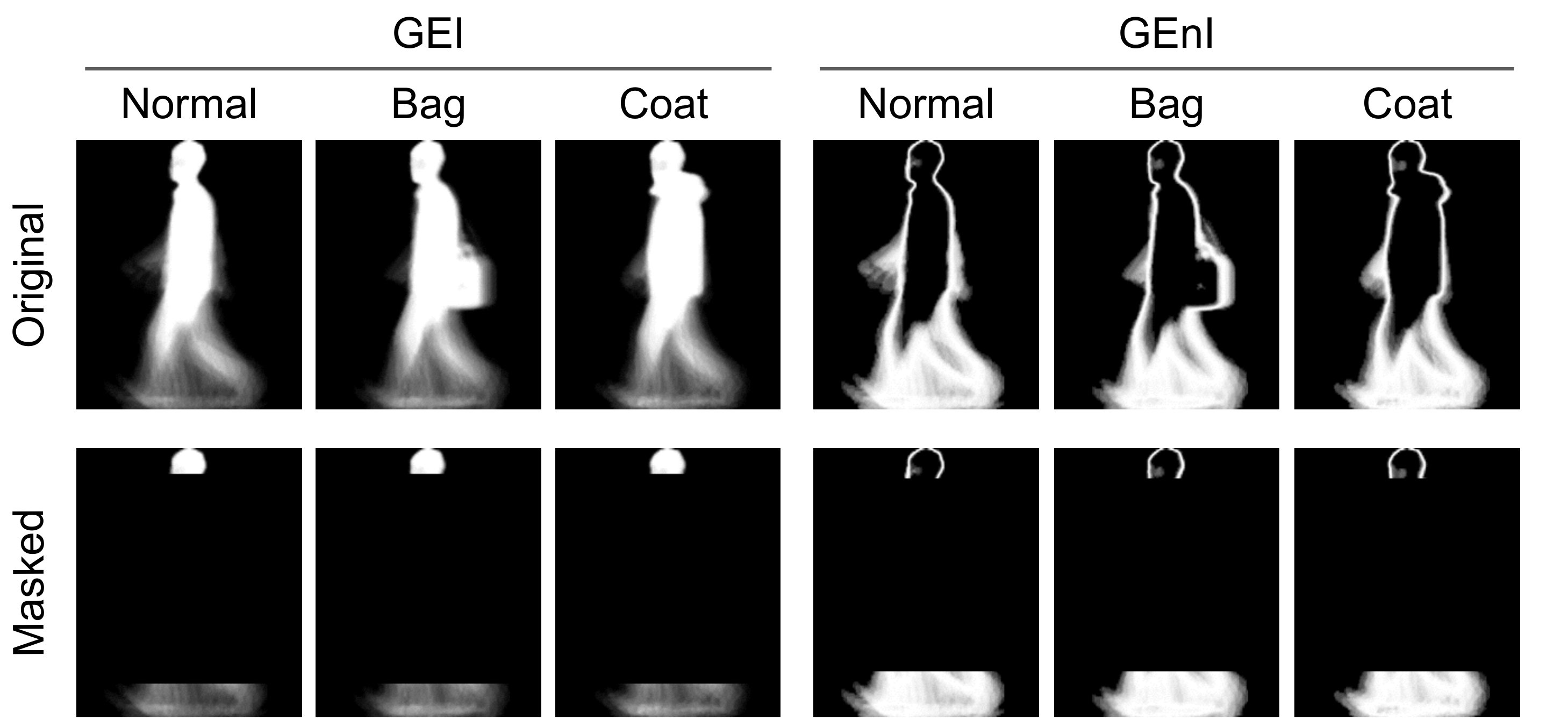 Figure 3
Figure 3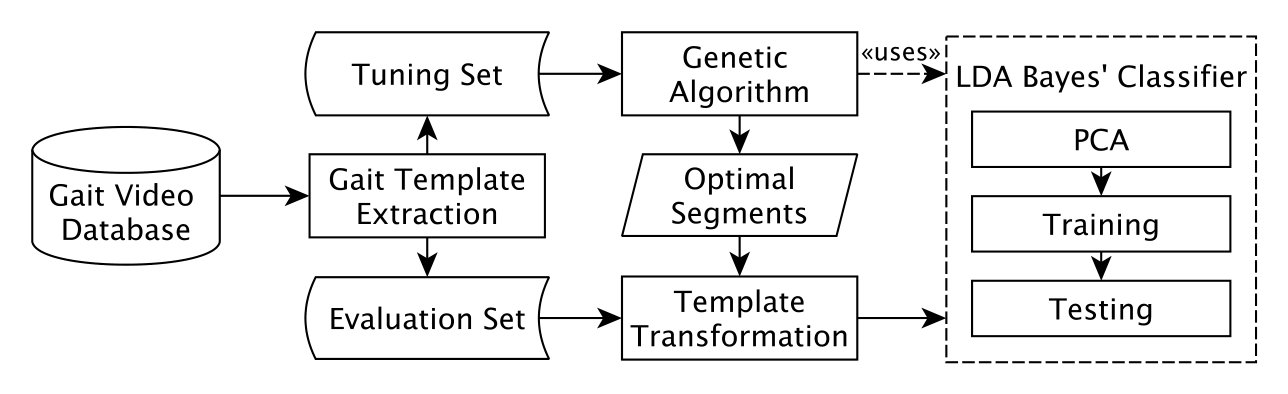 Figure 4
Figure 4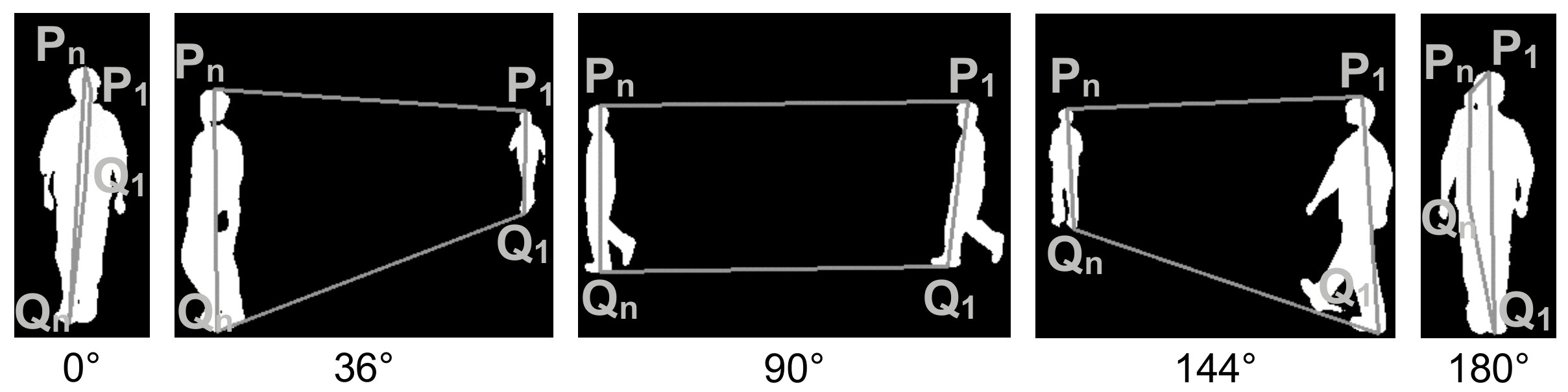 Figure 5
Figure 5| Year | Method | Normal | Bag | Coat | Mean | Std |
|---|---|---|---|---|---|---|
| 2006 | Han and Bhanu [6] | 99.60 | 57.20 | 23.80 | 60.20 | 37.99 |
| 2010 | Bashir et al. [8] | 100.0 | 78.30 | 44.00 | 74.10 | 28.24 |
| 2013 | Dupuis et al. [18] | 98.43 | 75.80 | 91.86 | 88.70 | 11.64 |
| 2014 | Kusakunniran [32] | 94.50 | 60.90 | 58.50 | 71.30 | 20.13 |
| 2015 | Arora et al. [33] | 98.00 | 74.50 | 45.00 | 72.50 | 26.56 |
| 2015 | Yogarajah et al. [34] | 97.60 | 89.90 | 63.70 | 83.73 | 17.77 |
| 2016 | Rida et al. [24] | 98.39 | 75.89 | 91.96 | 88.75 | 11.59 |
| - | GEI with GTS | 98.00 | 95.50 | 93.00 | 95.50 | 2.50 |
| - | GEnI with GTS | 97.00 | 95.00 | 91.00 | 94.33 | 3.06 |
| - | AEI with GTS | 89.50 | 85.50 | 77.50 | 84.17 | 6.11 |
| Angle | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| (a) Dupuis et al. [18] Panoramic Gait Recognition on GEI | |||||||||||
| Normal | 97.17 | 99.60 | 97.15 | 96.33 | 98.76 | 98.43 | 97.14 | 97.57 | 97.14 | 92.97 | 96.00 |
| Bag | 73.15 | 74.07 | 74.70 | 76.33 | 78.49 | 75.81 | 76.29 | 76.71 | 73.41 | 73.19 | 74.56 |
| Coat | 81.64 | 87.39 | 86.29 | 84.34 | 89.96 | 91.86 | 89.50 | 85.04 | 72.24 | 78.40 | 82.70 |
| Mean | 83.99 | 87.02 | 86.05 | 85.67 | 89.07 | 88.70 | 87.64 | 86.44 | 80.93 | 81.52 | 84.42 |
| (b) Choudhury et al. [23] View-Invariant Multiscale Gait Recognition on GEI | |||||||||||
| Normal | 100.0 | 99.00 | 100.0 | 99.00 | 100.0 | 100.0 | 99.00 | 99.00 | 100.0 | 100.0 | 99.00 |
| Bag | 93.00 | 89.00 | 89.00 | 90.00 | 77.00 | 80.00 | 82.00 | 84.00 | 92.00 | 93.00 | 89.00 |
| Coat | 67.00 | 56.00 | 80.00 | 71.00 | 75.00 | 77.00 | 75.00 | 65.00 | 64.00 | 64.00 | 66.00 |
| Mean | 86.67 | 81.33 | 89.67 | 86.67 | 84.00 | 85.67 | 85.33 | 82.67 | 85.33 | 85.67 | 84.67 |
| (c) Rida et al. [24] Group Lasso of Motion on GEI | |||||||||||
| Normal | 97.97 | 98.79 | 96.37 | 96.77 | 98.39 | 97.98 | 97.18 | 95.56 | 96.77 | 97.98 | 97.58 |
| Bag | 72.76 | 72.58 | 75.81 | 76.42 | 75.81 | 73.66 | 74.60 | 76.92 | 76.11 | 75.10 | 76.11 |
| Coat | 80.49 | 83.47 | 85.08 | 87.85 | 91.53 | 91.07 | 87.90 | 86.23 | 87.45 | 84.90 | 83.06 |
| Mean | 83.74 | 84.95 | 85.75 | 87.01 | 88.58 | 87.57 | 86.56 | 86.24 | 86.78 | 85.99 | 85.58 |
| (d) Proposed Genetic Template Segmentation on GEI | |||||||||||
| Normal | 98.50 | 98.98 | 99.00 | 97.00 | 97.50 | 96.00 | 95.00 | 97.50 | 94.00 | 93.85 | 98.99 |
| Bag | 95.00 | 98.47 | 96.50 | 96.00 | 97.50 | 93.50 | 93.50 | 94.00 | 92.50 | 91.33 | 94.44 |
| Coat | 97.00 | 99.49 | 97.50 | 94.00 | 88.00 | 90.50 | 89.50 | 94.50 | 92.00 | 91.28 | 93.94 |
| Mean | 96.83 | 98.98 | 97.67 | 95.67 | 94.33 | 93.33 | 92.67 | 95.33 | 92.83 | 92.15 | 95.79 |
| Method | Normal | Bag | Coat | Mean | Std | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| GEI with PGR [18] | 97.11 | 75.16 | 84.49 | 85.59 | 11.02 | |||||
| GEI with VI-MGR [23] | 99.55 | 87.09 | 69.09 | 85.24 | 15.31 | |||||
| GEI with GLM [24] | 97.39 | 75.08 | 86.28 | 86.25 | 11.16 | |||||
| Whole GEI | 98.12 | 81.77 | 32.66 | 70.85 | 34.07 | |||||
| GEI with GTS | 96.94 | 94.79 | 93.43 | 95.05 | 1.77 | |||||
| Whole GEnI | 96.76 | 84.41 | 40.64 | 73.94 | 29.49 | |||||
| GEnI with GTS | 95.11 | 92.52 | 91.32 | 92.98 | 1.94 | |||||
| Whole AEI | 95.62 | 75.51 | 42.42 | 71.18 | 26.86 | |||||
| AEI with GTS | 90.61 | 85.58 | 77.71 | 84.63 | 6.50 |
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
View-invariant Gait Recognition through
Genetic Template Segmentation
Ebenezer R.H.P. Isaac Susan Elias, Srinivasan Rajagopalan, and K.S. Easwarakumar Accepted manuscript (June 10, 2017). Please refer the published version in http://dx.doi.org/10.1109/LSP.2017.2715179. Vol. 24, No. 8, Aug. 2017.E.R.H.P. Isaac and K.S. Easwarakumar are with the Department of Computer Science and Engineering, Anna University, Chennai, India (e-mail: [email protected], [email protected])Susan Elias is with the School of Electronics Engineering, VIT University, Chennai Campus, India (e-mail: [email protected])Srinivasan Rajagopalan is with Department of Physiology and Biomedical Engineering, Mayo Clinic, Rochester, Minnesota, USA (email: [email protected])
Abstract
Template-based model-free approach provides by far the most successful solution to the gait recognition problem in literature. Recent work discusses how isolating the head and leg portion of the template increase the performance of a gait recognition system making it robust against covariates like clothing and carrying conditions. However, most involve a manual definition of the boundaries. The method we propose, the genetic template segmentation (GTS), employs the genetic algorithm to automate the boundary selection process. This method was tested on the GEI, GEnI and AEI templates. GEI seems to exhibit the best result when segmented with our approach. Experimental results depict that our approach significantly outperforms the existing implementations of view-invariant gait recognition.
Index Terms:
Biometrics, gait recognition, genetic algorithms, Linear Discriminant Analysis.
I Introduction
Gait recognition analyses the manner of walking for human identification. As it requires minimal cooperation from the subject compared to other modalities, it is considered to be an unobtrusive biometric. Gait recognition methods can be grouped into to either model-based or model-free approaches. Model-based methods [1, 2, 3, 4] attempt to track the dynamic changes in the articulation points during gait and hence require intense computational effort. Recent trends prefer the model-free approach as it captures the gait patterns without this requirement.
The notion of templates was introduced in [5] where the silhouettes of key frames are matched with that of the gallery for recognition. Han and Bhanu [6] projected a simple method that averages all silhouettes of a single gait cycle to produce a single image template called the gait energy image (GEI) to encompass the spatiotemporal characteristics. Its advent brought forth a new category of model-free gait recognition called template-based methods. The GEI quickly became the most successful method for multi-view gait recognition. Its major drawback was its weakness to covariates like clothing and load carrying which could adversely affect its performance. Many similar methods followed aiming to mitigate this weakness with their implementation of gait templates. Two of such notable templates were the active energy image (AEI) [7] and the gait entropy image (GEnI) [8]. With a slight trade-off in normal walk gait recognition, these new templates were able to produce a better recognition accuracy over the clothing and carrying covariates in gait. Bashir et al. [8] eliminated this trade-off by masking the GEI with the image of the respective GEnI.
In addition to clothing and carrying conditions, the view angle is found to be the most important covariate factor that affects gait recognition performance [9, 10, 11, 12]. There are essentially two types of view-invariant gait recognition models: view transformation model (VTM) and view-preserving model (VPM).
VTMs [13, 14, 15] transform the probe sequence’s angle to match with that of the gallery sequence. The VTM methods may differ in the measures used to gauge the transformation accuracy [16]. However, a significant level of error is inevitable in VTM-based gait recognition [17, 18].
VPMs consider multiple views as part of the gallery itself. This process incorporates the view information within the feature set for the extraction of relevant view-invariant gait features. Various methods can be employed to facilitate this. Examples include varying width vectors [9], Grassmann manifold [19], geometric view estimation [20], and spatiotemporal feet positioning [21]. A variant of VPM involves extraction of view-independent features through multi-view training and then use a single gallery view for testing [17, 22].
Dupuis et al. [18] formulated a single mask through the ranking of pixel features using the Random Forests classifier. Their panoramic gait recognition (PGR) algorithm uses pose estimation for view prediction. Choudhury et al. [23] designed a VPM named view-invariant multiscale gait recognition (VI-MGR) which applied Shannon’s entropy function to the lower limb region of the GEI. The sub-region selection was later modified by Rida et al. [24] automating this segmentation procedure with a process known as group lasso of motion (GLM). Their approach to the problem has shown significant improvement in the covariate recognition accuracy.
Though the following implementations do not concern view-invariance or covariate factors, their aspects add to the motivation of our approach. Jia et al. [20] have shown how incorporating the head and shoulder mean shape (HSMS) along with the Lucas-Kanade variant of the gait flow image (GFI) [25] greatly improves recognition accuracy. The genetic algorithm [26] was previously used in [27] to optimize the selection of model-based gait parameters and also in [28] for the selection of superimposed contour features.
In this article, we devise a VPM that can be applied to any gait template for gait identification. To refine the templates themselves, a method is proposed to automate its segmentation process with the use of the genetic algorithm (GA). These segments depict the optimal regions of the gait template that can be used to obtain the best recognition result at any covariate factor. The contributions of this paper are summarized as follows:
- •
A sub-region selection process through GA that greatly enhances the robustness of gait recognition against covariate factors.
- •
A separate mask is produced for multiple view angles to obtain the best possible feature set for any given view.
- •
A computationally efficient view-estimator design to detect the angle of view based on the slopes of the gait trajectory.
II Method
An overview of the method is illustrated in Fig. 1. The first step is to extract the gait template (such as the GEI) from the video that contains the gait sequence. After which the database is split into two disjoint sets – tuning set and evaluation set. The tuning set is fed to the GA to formulate the segments for optimal performance. Only those segments are extracted from the evaluation set to test the final accuracy of the system. The features are preprocessed by Principal Component Analysis (PCA) followed by a multi-class Linear Discriminant Analysis (LDA) and then classified using Bayes’ rule. The Multi-class LDA, also referred to as Multiple Discriminant Analysis (MDA) [29], is a supervised dimensionality reduction method that would maximize inter-class distance while minimizing intra-class distance. PCA [30] is an unsupervised dimensionality reduction algorithm that projects the given features to feature space that corresponds to the highest variance. The use of PCA yeilds a net positive effect on the performance of the classifier in terms of both processing time and accuracy. As a design choice, we use Bayes’ rule over the widely adopted NN.
II-A Gait Template Extraction
All gait templates are produced in a similar procedure to the one given below. Silhouettes in here are obtained through background subtraction and encoded in grayscale.
Extract only the silhouettes of the subject during a single gait cycle. 2. 2.
The silhouettes are center-aligned and scaled to a standard size; 240 x 240 in this case. 3. 3.
The standardized silhouettes for a given gait sequence are merged through a collation process to generate the gait template.
Let be the number of silhouettes for a gait cycle for a given subject. Each silhouette is denoted as . The novelty in a gait template is defined by its collation process. For example, in GEI [6], the collation process is given by
[TABLE]
Similarly, the templates AEI [7] and GEnI [8] used in this study also differ by their collation process.
II-B Genetic Template Segmentation
The boundary selection process is automated through GA to find the optimum boundary to segment the gait template before the actual training process. The gait template is to be split into four segments, viz., head portion H, leg portion F, mid-left section L and mid-right section R. The parameters to be optimized are the split points to divide these sections and a binary weight bit per region to decide whether the respective region should be included in the training as shown in Fig. 2. This process is used to produce a masking template for each view angle.
The chromosome structure for the genetic optimization is given as
[TABLE]
The variables denoted are split variables that determine the boundary for the region to segment and is represented by 8 bits each. defines the line between the head portion and the midsections; determines the split between the midsections and leg region; divides the two midsections. If is the decimal equivalent of the 8 bits used to represent the split variables, then its value can be decoded as
[TABLE]
where mini and maxi are the minimum and maximum possible values for the variable . The variables are binary variables that determine whether the segment is included for training, 1 indicates inclusion while 0 represents masking. The total size of chromosome hence becomes 28 bits.
A set of subjects with all covariates included is used as a tuning set to determine boundary locations for segmentation. The fitness function evaluates the hypothesis generated by the chromosome against the tuning set to produce a fitness measure. The three covariates considered here is A: normal walk, B: carrying a bag and C: clothing condition. If the fitness measure is simply set to the average of the accuracy of the three covariate sets, then the GA would make a significant trade-off on the normal walk sequence to maximize the overall accuracy. This was experimentally observed to at 90% while the state-of-the-art approaches produce accuracies of above 95% [24]. The fitness measure, for a given chromosome, , is calculated as
[TABLE]
where CCRK represents the correct classification rates for the corresponding covariate . Giving equal weights to each of the CCRk causes a trade-off in normal condition performance leading to an accuracy of 95.6% which is among the lowest of the normal CCR (refer Table I). Thus, the highest priority was given to CCR of the normal setting, CCR, to compete with the state of the art. In most approaches, clothing conditions pose the greatest challenge to template-based recognition systems. Hence the accuracy pertaining to the clothing condition, CCR, was given the next highest weight after normal setting to boost its accuracy on par with the carrying condition, CCR. These priority weights were assigned empirically.
The elitist selection variant of the generation propagation is used for this implementation of the GA [31]. That is, the chromosome corresponding to the highest fitness of a generation Tn is made sure to be propagated the next generation Tn+1. The GA is set to follow a uniform crossover with probability 0.6, a single bit mutation probability of 0.03 and populates 20 chromosomes per generation. The optimization runs for 15 generations although convergence was mostly attained before the 8th generation during experimental observation.
II-C View Estimation
Under the assumption that the subjects walk in a straight line for verification, the first and last visible silhouettes, and , are taken into consideration. Let and be the topmost and bottom-most point of as illustrated in Fig. 3. Similarly, and denote the topmost and bottom-most point of . Let and be the slopes of the lines and respectively. These two slopes alone form the features required to train the view-estimation classifier with the view as output labels. To reduce the number of cases, the sequence is passed through a simple check to verify whether the angle lies in the coronal plane ( or ). If the last silhouette overlaps the first, then the viewpoint is determined to be at and the direct opposite for . If both of these cases fail, then the angle should be one among those other than the two in the coronal plane.
III Experimental Results and Discussion
The CASIA dataset B is the benchmark gait database used for the experimental validation. The dataset includes six instances of normal walk (Set-A), two instances of walking while carrying a bag (Set-B) and two instances of walking while wearing an overcoat (Set-C) of 124 individuals. Each instance is captured over 11 angles of view, from 0 to 180, adding up to a total of 13640 instances. Further detail can be obtained in [35]. Set-A is split to Set-A1 containing four instances and Set-A2 for the remaining. Only Set-A1 is used for training. 24 subjects were randomly selected from the CASIA-B dataset to participate in the tuning set. These subjects were removed from the gallery for the evaluation phase just as in [20].
The experiments were first executed under the sagittal angle, 90 view, to focus on the effect of carrying and clothing covariates. The GEI, GEnI, and AEI were used as the base templates. The templates before and after GTS appear as shown in Fig. 4. The performance of the proposed GTS is compared against that claimed by other approaches in Table I.
The upper portion of the gait template segmented by the GA chose only the head of the subject and neglected the shoulders as opposed to what was selected by Jia et al. in [20]. The GA detected that the shoulder metric would lead to a considerable loss in accuracy while wearing an overcoat and hence chose a little before shoulder region.
It is evident from the previously reported results in Table I that the clothing condition is the most challenging covariate leading to a lesser CCR. Clothing conditions cause a greater change in the subjects’ silhouettes. As template-based methods rely on spatiotemporal changes of the silhouettes during gait, the recognition performance is adversely affected. A more efficient performance is attained when the regions that have an impact on such covariates are masked out. The arm-swing constraints imposed by the weight of the clothing and the carrying condition would compromise the accuracy at the midsection. As speculated, the mid-left and mid-right sections were ignored in the optimal hypothesis generated by the GTS for every angle and each type of gait template. Note that the segmented GEI has a much smaller lower section due to the greater effect of the covariates on the GEI template. The area permitted by the mask is 25.2% of the total template area; neglecting the constant features, only 8.4% of the feature space is utilized. Nevertheless, the GEI masked with GTS outperforms the existing methods.
Genetic algorithm is known to have a tendency to give subobtimal results. There comes a requirement to tune the parameters after the genetic algorithm converges. The outcome of the GTS shows that only two parameters are variable: and . That is, weight bits are optimally assigned as . This assignment leaves irrelevant as both mid-sections are ignored. These two variables can be sequentially optimized starting with with a fixed and then with the optimized . This process is also followed using the tuning set for validation.
The GTS is applied so as to generate one masking template for every angle using the tuning set. The tuning set is also used to train the view estimator. The evaluation set is separated into gallery and probe sets. After which, 11 LDA-Bayes’ classifiers are trained (one for each view angle) using the gallery set. The angle of each instance of the probe set is predicted with the view estimator. The instance is then passed to the appropriate view-specific classifier for the identity prediction. Note that each angle set also has it’s own PCA-LDA transformation. PCA is set to retain of data variance. This resulted in retaining a different number of Eigenvectors for each angle for a given template. The numbers range from 123 to 181 for GEI, 147 to 181 for GEnI, and 95 to 147 for AEI.
The accuracy of the view estimator plays a vital role in view-invariant recognition. The proposed view estimator is accurate in finding the correct angle of the given gait sequences in contrast to the proposed in [18]. In addition, the view-dependent classifiers are also capable of producing an applicable accuracy to neighboring views minimizing the error of the overall recognition.
Table II reports the CCR of the state-of-the-art view-invariant gait recognition methods along with the best performing template with the GTS, the GEI. All of the scores in this table have been claimed to be obtained without the prior knowledge of the actual view angle. The overall performance of the methods including the base templates taking into account all angles is provided in Table III. Fig. 5 compares the error associated for each covariate for different methods. It is evident that the GTS has improved the covariate performance of all of the base gait templates.
The VI-MGR shows the highest normal condition CCR, but with a substantially lower CCR for the clothing condition. The PGR and GLM perform equally well with a slight trade-off in carrying condition. The GTS with the GEI shows the best CCR in both carrying and clothing condition with minimal trade-off in normal condition resulting in a far superior overall performance. The entire operation was also implemented with NN in place of Bayes’ rule for comparison. On an average of all 11 views and 3 covariates, GTS-GEI with NN (k=) yeilded an accuracy of 94.54% which is marginally lesser than Bayes’ rule with 95.05%.
IV Conclusion and Future Work
In this paper, a novel segmentation technique was proposed to find the optimal regions of a gait template for view-invariant gait recognition robust to covariate factors. The genetic algorithm automates the boundary selection for each angle while a view-estimator determines the probe angle and selects the suitable view-specific classifier for recognition. The overall results clearly depict that the proposed GTS method outperforms the existing methods in literature. The next step would be to extend this framework to gait authentication.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] I. Bouchrika and M. S. Nixon, “Model-based feature extraction for gait analysis and recognition,” in International Conference on Computer Vision/Computer Graphics Collaboration Techniques and Applications . Springer, 2007, pp. 150–160.
- 2[2] M. Goffredo, I. Bouchrika, J. N. Carter, and M. S. Nixon, “Performance analysis for gait in camera networks,” in Proceedings of the 1st ACM Workshop on Analysis and Retrieval of Events/Actions and Workflows in Video Streams , ser. AREA ’08. New York, NY, USA: ACM, 2008, pp. 73–80. [Online]. Available: http://doi.acm.org/10.1145/1463542.1463555
- 3[3] R. Zhang, C. Vogler, and D. Metaxas, “Human gait recognition at sagittal plane,” Image and Vision Computing , vol. 25, no. 3, pp. 321 – 330, 2007, articulated and Non-rigid motion.
- 4[4] C. Yam, M. S. Nixon, and J. N. Carter, “Automated person recognition by walking and running via model-based approaches,” Pattern Recognition , vol. 37, no. 5, pp. 1057–1072, 2004.
- 5[5] R. T. Collins, R. Gross, and J. Shi, “Silhouette-based human identification from body shape and gait,” in Automatic Face and Gesture Recognition, 2002. Proceedings. Fifth IEEE International Conference on . IEEE, 2002, pp. 366–371.
- 6[6] J. Han and B. Bhanu, “Individual recognition using gait energy image,” IEEE transactions on pattern analysis and machine intelligence , vol. 28, no. 2, pp. 316–322, 2006.
- 7[7] E. Zhang, Y. Zhao, and W. Xiong, “Active energy image plus 2dlpp for gait recognition,” Signal Processing , vol. 90, no. 7, pp. 2295–2302, 2010.
- 8[8] K. Bashir, T. Xiang, and S. Gong, “Gait recognition without subject cooperation,” Pattern Recognition Letters , vol. 31, no. 13, pp. 2052–2060, 2010.