Deterministic Distributed Construction of $T$-Dominating Sets in Time $T$
Avery Miller, Andrzej Pelc

TL;DR
This paper investigates the deterministic distributed construction of small $T$-dominating sets in networks, revealing fundamental limitations and providing algorithms that approach optimal sizes depending on the time $T$.
Contribution
It establishes lower bounds on the size of $T$-dominating sets achievable within certain time constraints and presents an algorithm that constructs near-optimal sets.
Findings
Impossible to asymptotically match the lower bound on ring graphs.
Size of $T$-dominating sets is highly sensitive to the constant factors in $ ext{log}^* n$ time.
Provided an algorithm constructing $T$-dominating sets of size $n - ext{Theta}(T)$.
Abstract
A -dominating set is a set of nodes of a graph such that, for each node , there exists a node at distance at most from . Our aim is the deterministic distributed construction of small -dominating sets in time in networks modeled as undirected -node graphs and under the communication model. For any positive integer , if is the size of a pairwise disjoint collection of balls of radii at least in a graph, then is an obvious lower bound on the size of a -dominating set. Our first result shows that, even on rings, it is impossible to construct a -dominating set of size asymptotically (i.e., such that ) in time . In the range of time , the size of a -dominating set turns out to be very sensitive to multiplicative constants in running time. Indeed, it follows…
Click any figure to enlarge with its caption.
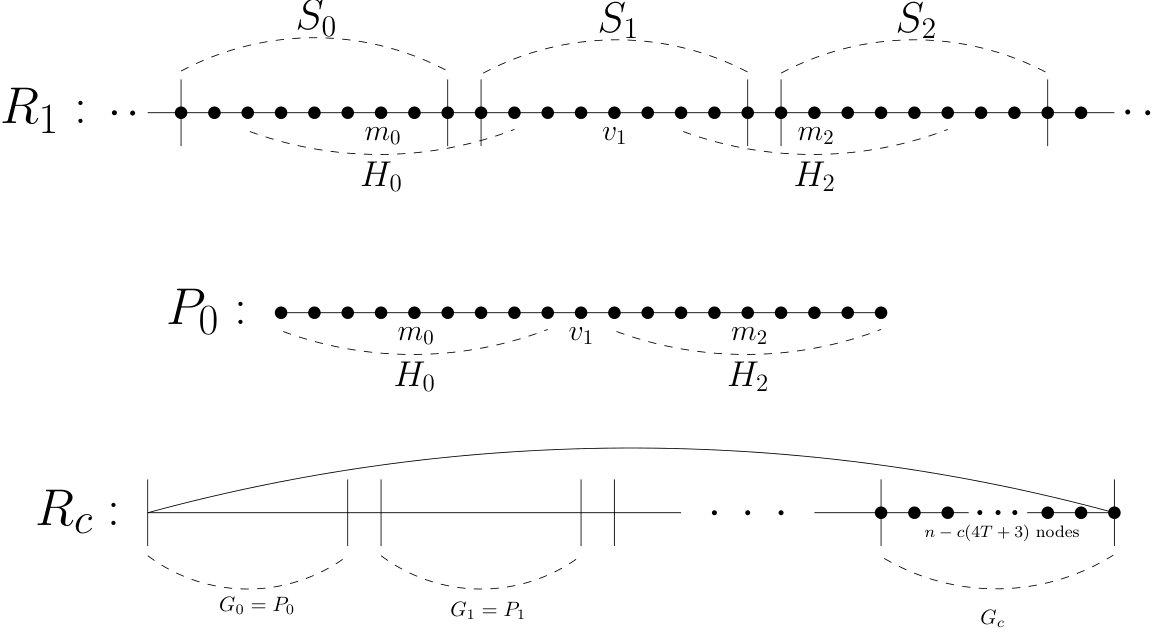 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Deterministic Distributed Construction
of -Dominating Sets in Time
Avery Miller1, Andrzej Pelc1
1 Université du Québec en Outaouais, Gatineau, Canada.
E-mails: [email protected], [email protected]
Abstract
A -dominating set is a set of nodes of a graph such that, for each node , there exists a node at distance at most from . Our aim is the deterministic distributed construction of small -dominating sets in time in networks modeled as undirected -node graphs and under the communication model.
For any positive integer , if is the size of a pairwise disjoint collection of balls of radii at least in a graph, then is an obvious lower bound on the size of a -dominating set. Our first result shows that, even on rings, it is impossible to construct a -dominating set of size asymptotically (i.e., such that ) in time .
In the range of time , the size of a -dominating set turns out to be very sensitive to multiplicative constants in running time. Indeed, it follows from [9], that for time with large constant , it is possible to construct a -dominating set whose size is a small fraction of . By contrast, we show that, for time for small constant , the size of a -dominating set must be a large fraction of .
Finally, when , the above lower bound implies that, for any constant , it is impossible to construct a -dominating set of size smaller than , even on rings. On the positive side, we provide an algorithm that constructs a -dominating set of size on all graphs.
Keywords: -dominating set, LOCAL model, distributed algorithm, undirected networks
1 Introduction
1.1 Background
A -dominating set is a set of nodes of a graph with the property that for each node there exists a node at distance at most from . Our aim is the deterministic distributed construction of small -dominating sets in time , in networks modeled as undirected graphs. Such sets are important in many applications. For example, placing facilities (e.g., gas stations or restaurants in a town, or databases in a communication network) at nodes of a -dominating set guarantees that every node will be at distance at most from some facility. However, in order to take advantage of this proximity, every node should know a short path to some nearby facility. Then a prospective customer will be able to reach a nearby gas station or restaurant from any street crossing, and a mobile agent situated at any node of a network will be able to reach a nearby database. In many applications related to computer networks, in particular when the bandwidth is large (e.g., in optical networks) the time needed to send any message to a node at distance in the underlying graph is (proportional to) . Hence we may assume that, given time , each node can learn only the locations of databases situated at distance at most from it. This is the reason why, given some time , we look for -dominating sets (and not, e.g., just for -dominating sets). If the constructed set is not -dominating then there are nodes in the graph which do not become aware of any node in the chosen set within time . For reasons of economy, we want the constructed -dominating set to be as small as possible.
1.2 Model and Problem Description
The network is modeled as an undirected graph with labeled nodes. Labels are drawn from the set of integers , where is polynomial in . Each node has a distinct label. Initially each node knows its label, its degree, and parameters , and .
We use the extensively-studied communication model [13]. In this model, communication proceeds in synchronous rounds and all nodes start simultaneously. In each round, each node can exchange arbitrary messages with all of its neighbours and perform arbitrary local computations. Hence, the decisions of a node in round in any deterministic algorithm are a function of: (1) the subgraph induced by nodes at distance at most from , except for the edges between nodes at distance exactly from ; and (2) the degrees of all nodes at distance from . The time of a task is the minimum number of rounds sufficient to complete it by all nodes.
It is well known that the synchronous process of the model can be simulated in an asynchronous network. This can be achieved by defining for each node separately its asynchronous round ; in this round, a node performs local computations, then sends messages stamped to all neighbours, and waits until it gets messages stamped from all neighbours. To make this work, every node is required to send at least one (possibly empty) message with each stamp until termination. Thus, all of our results can be translated for asynchronous networks by replacing “time of completing a task” by “the maximum number of asynchronous rounds to complete it, taken over all nodes”.
A deterministic algorithm working in time distributedly constructs a -dominating set if, after rounds, some nodes output 1, all other nodes output 0, and the nodes that output 1 form a -dominating set. In all algorithms leading to upper bounds in this paper, every node additionally learns a path of length at most to some node of the -dominating set.
We use the following terminology. When , we say that functions and have the same order of magnitude. When converges to 1, we say that and are asymptotically equal.
1.3 Our results
For a given time , we give upper and lower bounds on the size of a -dominating set that can be deterministically constructed in time . The main technical contribution of this paper are lower bounds that are valid even on the class of rings.
For any positive integer , if is the size of a pairwise disjoint collection of balls of radii at least in a graph, then is an obvious lower bound on the size of a -dominating set. Our first result shows that, even on rings, it is impossible to construct a -dominating set of size asymptotically (i.e., such that ) in time . Indeed, we prove that for rings (where there exist -dominating sets of size ) any -dominating set constructed in time must be of size larger than , for any . By contrast, it follows from [9] that a -dominating set of size can be constructed in time in any graph, which gives size for time .
In the range of time , the size of a -dominating set turns out to be very sensitive to multiplicative constants in running time. Indeed, it follows from [9] that, for time with large constant , it is possible to construct a -dominating set whose size is a small fraction of . More precisely, the algorithm from [9] has the property that, for any constant , there exists a positive constant for which this algorithm produces, on any sufficiently large graph, a -dominating set of size smaller than in time . By contrast, we show that, for time for small constant , the size of a -dominating set must be a large fraction of . More precisely, we prove that, for any constant , there exists a constant , such that any algorithm constructing a -dominating set in time will produce a set of size at least on some ring of arbitrarily large size .
Finally, moving to very short time, i.e., when , the above lower bound implies that, for any constant , it is impossible to construct a -dominating set of size smaller than , even on rings. On the positive side, we provide an algorithm that constructs a -dominating set of size on all graphs.
Thus our results show two gaps in the minimum size of a -dominating set that can be constructed in time : the first gap is while moving from time to time , when this size goes from to , and the second gap is while moving from time to time , when this size becomes larger than for any constant .
1.4 Related work
Distributed solutions of combinatorial optimization problems on graphs have been intensely studied in the last two decades. Research was aimed at fast vertex coloring [2, 3], fast construction of maximal independent sets [1, 7, 12], of dominating and -dominating sets [8, 9], and of minimum weight spanning trees [4, 9]. Various communication models have been used, ranging from the model used in this paper, to the model in which messages must be of logarithmic size [9], the radio network model [12], and to the highly contrived beeping model [1] in which a node can transmit only one beep in each round.
In [6], the authors studied how fast a capacitated minimum dominating set can be distributedly constructed. They showed that, for general graphs, every distributed algorithm achieving a non-trivial approximation ratio (even for uniform capacities) must have a time complexity that essentially grows linearly with the network diameter. In [5, 8], randomized distributed solutions for dominating set approximation were presented. In [10] the authors prove that, for any -approximation of the minimum dominating set or maximum independent set on Unit Disk Graphs, the time of finding this approximation must satisfy . The paper most closely related to the present work is [9]. The authors present a distributed algorithm to find a -dominating set of size at most in arbitrary -node graphs. Their algorithm runs in time in the model.
2 A general lower bound
The following useful fact is a straightforward consequence of the definition of a -dominating set.
Fact 2.1
For any -dominating set in a ring , there must be at least one member of in each segment of nodes.
Fact 2.1 implies that is a lower bound on the size of a -dominating set in rings. In fact, every ring of size has a -dominating set of this size. Our first result shows that in time we cannot construct a -dominating set of size even asymptotic in this lower bound. (For this question is meaningless, since is then .)
Theorem 2.1
Consider any constant smaller than 3/2 and any algorithm that runs in time and outputs a -dominating set. For sufficiently large , there exists a ring of size for which outputs a -dominating set of size greater than .
Proof. For ease of exposition, assume that divides and that is divisible by 4. The proof can be modified if the latter assumptions are not satisfied.
The high-level idea to prove our lower bound is as follows. We first execute algorithm on a ring of size and we pick a representative member of the resulting -dominating set in each of the segments of size that form a partition of the ring. Next, we take representatives of even-numbered segments and partition them into consecutive pairs. For each pair, we construct a path consisting of their balls with radius and one additional node separating them. We repeat this process on a different ring (disjoint from the first) to obtain additional paths of this type. We concatenate sufficiently many of these paths and add enough additional nodes to form a ring of size . As a consequence, if we run algorithm on this new ring, the representatives have the same balls with radius as in the original ring, and hence act identically. Further, pairs of representatives are too far apart in the new ring to -dominate all nodes, and consequently there must be an additional node in the -dominating set between the representatives in each pair. This will imply our lower bound.
We now show how this idea is implemented. Note that, if is a constant smaller than 3/2 and , then . Let be the ring obtained from the path of nodes by adding the edge , and let be the ring obtained from the path of nodes by adding the edge . We illustrate our construction using ring to obtain paths , and an analogous construction using ring will produce paths .
We partition this ring into segments of size , namely, for each integer , denote by the segment . Execute algorithm on , and call this execution . For each , let be the node in with smallest label that outputs 1 in this execution. By Fact 2.1, is well-defined.
Next, for each integer , define to be the path consisting of nodes centered at , namely . Note that, for every , the paths and are disjoint since there are at least nodes between and in (for example, the nodes in .)
Next, for each integer , where , define to be the path obtained by taking node (i.e., the middle node of segment ), the paths , and adding the edges and . Note that, in , there exist nodes between and . Further, .
This concludes the construction of paths . In the construction of paths , the range for index starts at , the range of index starts at , and the range of index starts at .
Finally, let , and construct a ring as follows. Choose paths from the set of paths . Let be a path consisting of nodes whose labels do not appear in . Construct by concatenating the paths and adding an edge between the endpoints of this path. Note that . The above construction is illustrated in Figure 1.
We now execute algorithm on , and call this execution . First, note that, for each , the nodes and cannot distinguish between executions and , so they will both output 1 in . Further, for each , since there are nodes between and , Fact 2.1 implies that there must be at least one node between and that outputs 1. Hence, for each , there are 3 nodes in that output 1. Finally, recall that , and, by our choice of , this is bounded below by . By Fact 2.1, there are at least 4 nodes in that output 1. Therefore, the number of nodes that output 1 in execution is bounded below by .
We do not know if a -dominating set of size can be constructed in time , even on rings. The best known upper bound of on the size of a -dominating set that can be constructed in any graph in time follows from [9].
3 Time
In the range of time , the size of a -dominating set turns out to depend on the multiplicative constant in running time. First notice that, for time with large constant , Theorem 4.4 of [9] implies that a -dominating set of size for a small constant can be constructed in every graph. More precisely we have the following proposition.
Proposition 3.1
For every positive constant , there exists a positive constant such that, for all sufficiently large networks of size and when , there is an algorithm producing a -dominating set of size at most in time .
In contrast with the above positive result, we now show that, for small time , the size of any -dominating set produced in time must be a large fraction of , even on rings with node labels from .
Theorem 3.1
For any positive constant , there exists a positive constant such that, for any algorithm that takes input and finds a -dominating set in time on all rings of size , algorithm produces a -dominating set of size greater than , for arbitrarily large .
Proof. Choose constants and such that, for any , any algorithm working in time at most on rings of size fails to produce a proper 8-colouring on some ring of size . From [11], we know that the time needed to 8-colour rings of size satisfies . It follows that , so . When , it follows that . Therefore, and are suitable choices.
Choose any integer constant such that . Note that implies . Let . To obtain a contradiction assume that, for some positive integer , we have an algorithm with input that, for all , when , the algorithm finds a -dominating set of size at most on every ring of size . To prove the theorem we show that, for any integer , there exists an such that, for every ring of size with node labels from , we can 8-colour in time less than , which contradicts the choice of and .
Choose such that and . Consider any ring of size with node labels from . At a high level, our 8-colouring of will work as follows. Execute algorithm with input on and call this execution . By assumption, when execution terminates, a -dominating set in of size at most has been constructed. The nodes in this set will be called members, and all other nodes will be called non-members. A maximal segment of that contains only members (respectively, non-members) will be called a stretch of members (respectively, non-members.) We would like to distributedly constant-colour each stretch, which can be done if all nodes see the boundaries of the stretch to which they belong. Hence, in order to break up long stretches, the members that do not have nearby non-members in both directions will execute algorithm again, but with a carefully chosen input smaller than . Call this execution . The nodes in the -dominating set constructed in this execution will be called survivors, and all other nodes that were involved in execution will be called non-survivors. As before, a maximal segment of that contains only survivors (respectively, non-survivors) will be called a stretch of survivors (respectively, non-survivors.) We will prove that stretches of members, non-members, survivors and non-survivors are now short enough for their elements to see their boundaries. Finally, the nodes will properly two-colour the stretch to which they belong: stretches of non-members using colours , stretches of members using colours , stretches of non-survivors using colours , and stretches of survivors using colours . This will properly colour the entire ring. For a full description of the algorithm executed at each node , see Algorithm 1. We denote by the label of node .
We now prove some useful facts about the number of nodes in any stretch of after executing EightColourRing. First, notice that any stretch of members that did not execute algorithm on line 20 is of length at most (see line 14). The next two claims follow from the fact that, since produces a -dominating set, every non-member (resp., non-survivor) is at distance at most from at least one member (resp., survivor).
Claim 3.1
Every stretch of non-members contains at most nodes.
Claim 3.2
Every stretch of non-survivors contains at most nodes.
The following claim implies that long stretches of members are broken up into short stretches of survivors or of non-survivors.
Claim 3.3
Every stretch of survivors contains less than nodes.
We prove the claim by way of contradiction. Assume that there exists a stretch of survivors containing a sequence of nodes . By definition, this means that the nodes outputted 1 in the execution , i.e., when provided as input. So, we construct a ring of size such that when algorithm is executed on with input , nodes output the same value as in execution on . In particular, we obtain from by taking the segment and adding the edge . We now consider the execution of on with input , which we will call . Execution consists of rounds. In particular, this means that the executions and are indistinguishable to each of the nodes since they have the same balls with radius (and, therefore, the same balls with radius ) in both executions. It follows that output 1 in execution , hence they belong to the -dominating set constructed in execution . Consequently, the -dominating set constructed in execution has size at least . Finally, by our choice of , it follows that . But this contradicts the assumption that, for every ring of size at least , algorithm , when given input , produces a -dominating set of size at most . This concludes the proof of the claim.
Next, we show that the colouring can be carried out. In particular, at lines 10, 15, 24, and 28 of EightColourRing, node must identify all of the nodes in that belong to the stretch containing . The following two claims show that this is possible.
Claim 3.4
At lines 10 and 15, the sequence can be determined by .
In order to prove the claim, let and be the neighbours of and , respectively, that are not contained in . The distance from to each node in is at most .
First, consider line 10. By Claim 3.1 and since , the distance from to each node in is at most . Consequently, after performing line 6, has determined that nodes and have output 1 and nodes for have output 0, from which it deduces that it belongs to stretch .
At line 15, since and the condition in line 14 evaluated to true, the distance from to each node in is at most . Consequently, after performing line 6, has determined that nodes and have output 0 and nodes for have output 1, from which it deduces that it belongs to stretch . This concludes the proof of the claim.
Claim 3.5
At lines 24 and 28, the sequence can be determined by .
In order to prove the claim, let and be the neighbours of and , respectively, that are not contained in .
At line 24, by Claim 3.2 and since , the distance from to each node in is at most . Consequently, after performing line 20, has determined that nodes and have output 1 and nodes for have output 0, from which it deduces that it belongs to stretch .
Next, consider line 28. By Claim 3.3, the distance from to each node in is at most . Consequently, after performing line 20, has determined that nodes and have output 0 and nodes for have output 1, from which it deduces that it belongs to stretch . This concludes the proof of the claim.
Finally, since EightColourRing properly 2-colours each stretch, and every two neighbouring stretches use disjoint sets of colours, it follows that has been properly 8-coloured. The number of communication rounds used by EightColourRing is .
The above theorem implies that there exists a positive constant such that, for any algorithm that takes input and finds a -dominating set in time on all rings of size , algorithm produces a -dominating set of size , for arbitrarily large . It is interesting to compare this result with the lower bound from [10]. In particular, when restricting attention to constructing -dominating sets in time , the result from [10] only implies the lower bound on the size of the -dominating set, regardless of the choice of the constant .
4 Time
We first observe that Theorem 3.1 implies a strict lower bound on the size of -dominating sets that can be constructed in time . Indeed, in this case, for any constant we have for sufficiently large . Hence Theorem 3.1 implies the following result.
Proposition 4.1
Suppose that . For any positive constant , any algorithm that takes input and finds a -dominating set in time on all rings of size produces a -dominating set of size greater than , for arbitrarily large .
On the positive side, we show that, while a trivial -dominating set consists of all nodes, we can reduce this size in time by a number of nodes proportional to . The following algorithm is executed by a node with label .
Theorem 4.1
For any positive integer , Algorithm ChooseSmallest produces a -dominating set of size at most in time .
Proof. First, observe that Algorithm 2 uses communication rounds.
Next, we show that the nodes that output 1 form a -dominating set. To see why, consider an arbitrary node , and note that the value of at specifies the label of some node within distance from . At line 5 in node ’s execution of Algorithm 2, will learn the value of at , so will change its output to 1 at line 7. Thus, is dominated by .
Finally, we show that at most nodes output 1. It is sufficient to show that all of the nodes with the largest labels output 0. Consider any node such that fewer than nodes in the network have a label larger than ’s label. To obtain a contradiction, assume that outputs 1. It follows from the algorithm’s description that there is some node (possibly equal to ) within distance from such that the value of at is equal to ’s label. Therefore, ’s label is the smallest out of all of the labels of nodes within distance from . However, there are at least nodes within distance from , which means that at least of them have a label larger than ’s label. This contradicts the assumption that fewer than nodes in the network have a label larger than ’s label. It follows that all of the nodes with the largest labels output 0, which gives the desired upper bound on the number of nodes that output 1.
Note that, on line 3 of Algorithm ChooseSmallest, each node learns a short path to the node with label , i.e., to some node in the -dominating set.
5 Conclusion
We established upper and lower bounds on the size of a -dominating set that can be constructed in time , for various times . While the remaining gaps between these bounds are not large, several interesting problems remain open.
In the time range , it remains open if our lower bound , for any , can be sharpened to , i.e., if the upper bound following from [9] has optimal order of magnitude.
When , probably the most interesting question concerns the upper end of this time range. Is there a constant so large that a -dominating set of size can be constructed in time ? (The result from [9] implies that we can construct such a set whose size is an arbitrarily small constant fraction of .) Another question concerns determining the minimum time to construct a -dominating set whose size is a given fraction of . More precisely, for a given constant , what is the minimum constant such that a -dominating set of size can be constructed in time ?
In the time range , our results leave very little room, as size of a -dominating set, for any constant , is excluded. Nevertheless, it remains open if our lower bound can be sharpened to for such small values of .
In this paper we chose the model, in which nodes can send messages of arbitrary size in each round. This is a reasonable assumption when the bandwidth is large, e.g., in optical networks. When the size of the bandwidth is more restricted, it would be more suitable to use the model, in which only messages of size logarithmic in the size of the network can be sent in each round. It remains open how our results change in such a model. Of course, the lower bounds valid for the model still hold for the more restrictive model, but, for example, the time of Algorithm 2 would change, as it calls for sending large messages, which could potentially use many rounds just to reach immediate neighbours.
Acknowledgments
This research was partially supported by NSERC discovery grant 8136 – 2013 and by the Research Chair in Distributed Computing at the Université du Québec en Outaouais.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] Y. Afek, N. Alon, Z. Bar-Joseph, A. Cornejo, B. Haeupler, F. Kuhn, Beeping a maximal independent set. Proc. 25th International Symposium on Distributed Computing (DISC 2011), 32-50.
- 2[2] L. Barenboim, M. Elkin, Distributed Graph Coloring: Fundamentals and Recent Developments. Morgan & Claypool, 2013.
- 3[3] L. Barenboim, M. Elkin, Combinatorial algorithms for distributed graph coloring, Distributed Computing 27 (2014), 79-93.
- 4[4] J. Garay, S. Kutten, and D. Peleg, A sub-linear time distributed algorithm for minimum- weight spanning trees, SIAM Journal on Computing 27(1998), 302-316.
- 5[5] L. Jia, R. Rajaraman, T. Suel, An efficient distributed algorithm for constructing small dominating sets, Distributed Computing 15 (2002), 193-205.
- 6[6] F. Kuhn, T. Moscibroda, Distributed approximation of capacitated dominating sets, Proc. 19th Ann. Symposium on Parallelism in Algorithms and Architectures (SPAA 2007), 161-170.
- 7[7] F. Kuhn, T. Moscibroda, T. Nieberg, R. Wattenhofer, Fast deterministic distributed maximal independent set computation on growth-bounded graphs, Proc. 19th International Symposium on Distributed Computing (DISC 2005), 273-287.
- 8[8] F. Kuhn, R. Wattenhofer, Constant-time distributed dominating set approximation. Distributed Computing 17 (2005), 303-310.