Towards Full Automated Drive in Urban Environments: A Demonstration in GoMentum Station, California
Akansel Cosgun, Lichao Ma, Jimmy Chiu, Jiawei Huang, Mahmut Demir,, Alexandre Miranda Anon, Thang Lian, Hasan Tafish, Samir Al-Stouhi

TL;DR
This paper demonstrates a full automated driving system in urban environments, showcasing safe handling of complex scenarios over 110km with minimal driver intervention, highlighting progress and remaining challenges in urban autonomous driving.
Contribution
The paper presents a complete architecture and real-world demonstration of urban autonomous driving, addressing perception and planning modules in complex city scenarios.
Findings
Safe handling of traffic lights, pedestrians, and construction zones
110km of autonomous driving with only 3 driver interventions
Consistent performance across multiple runs in urban conditions
Abstract
Each year, millions of motor vehicle traffic accidents all over the world cause a large number of fatalities, injuries and significant material loss. Automated Driving (AD) has potential to drastically reduce such accidents. In this work, we focus on the technical challenges that arise from AD in urban environments. We present the overall architecture of an AD system and describe in detail the perception and planning modules. The AD system, built on a modified Acura RLX, was demonstrated in a course in GoMentum Station in California. We demonstrated autonomous handling of 4 scenarios: traffic lights, cross-traffic at intersections, construction zones and pedestrians. The AD vehicle displayed safe behavior and performed consistently in repeated demonstrations with slight variations in conditions. Overall, we completed 44 runs, encompassing 110km of automated driving with only 3 cases…
Click any figure to enlarge with its caption.
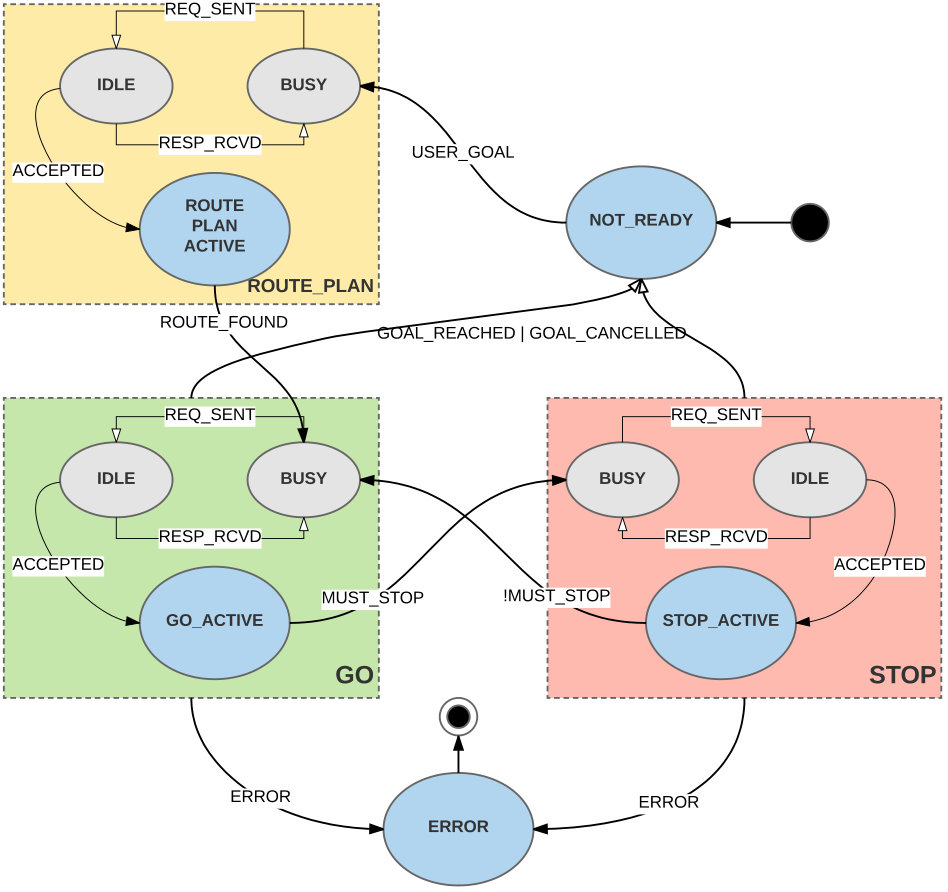 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18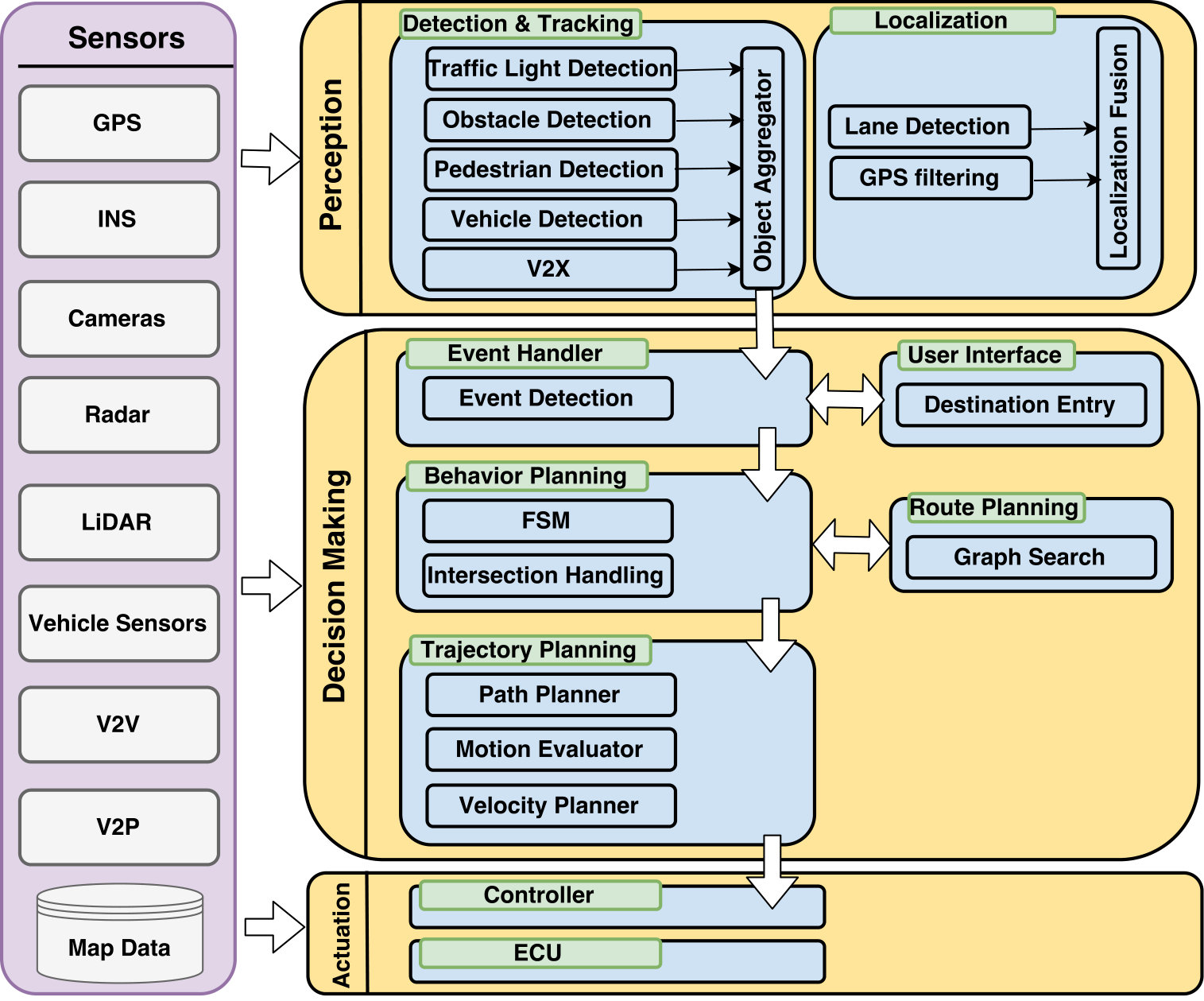 Figure 19
Figure 19Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.