Controlling percolation with limited resources
Malte Schr\"oder, Nuno A.M. Ara\'ujo, Didier Sornette, Jan Nagler

TL;DR
This paper investigates how to control the emergence of large-scale connectivity in networks using limited resources, proposing an efficient intervention strategy that can induce a discontinuous percolation transition.
Contribution
It introduces a novel control strategy for percolation with resource constraints and analyzes its impact on network connectivity transitions.
Findings
Percolation can be effectively controlled with limited resources.
The control strategy induces a discontinuous transition.
Optimal control can be achieved even with scarce resources.
Abstract
Connectivity - or the lack thereof - is crucial for the function of many man-made systems, from financial and economic networks over epidemic spreading in social networks to technical infrastructure. Often, connections are deliberately established or removed to induce, maintain, or destroy global connectivity. Thus, there has been a great interest in understanding how to control percolation, the transition to large-scale connectivity. Previous work, however, studied control strategies assuming unlimited resources. Here, we depart from this unrealistic assumption and consider the effect of limited resources on the effectiveness of control. We show that, even for scarce resources, percolation can be controlled with an efficient intervention strategy. We derive this strategy and study its implications, revealing a discontinuous transition as an unintended side-effect of optimal control.
Click any figure to enlarge with its caption.
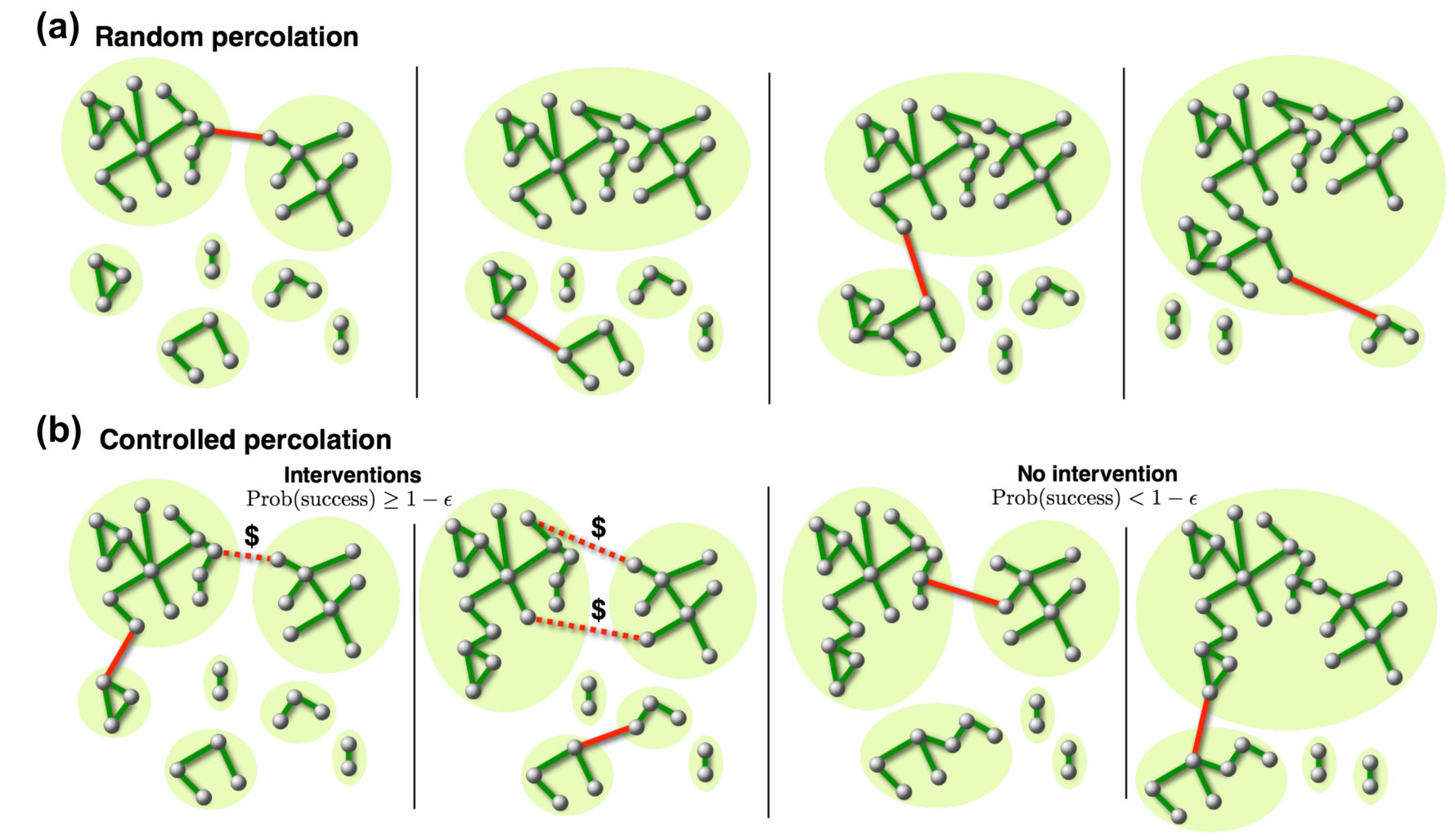 Figure 1
Figure 1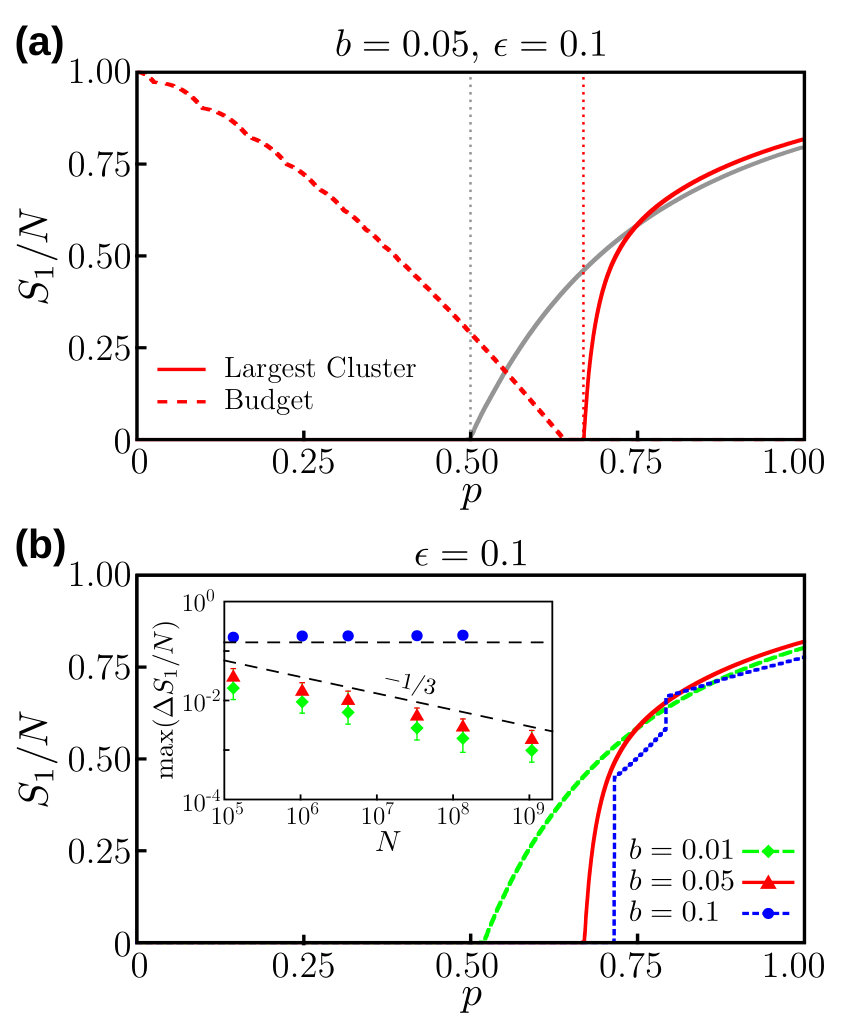 Figure 2
Figure 2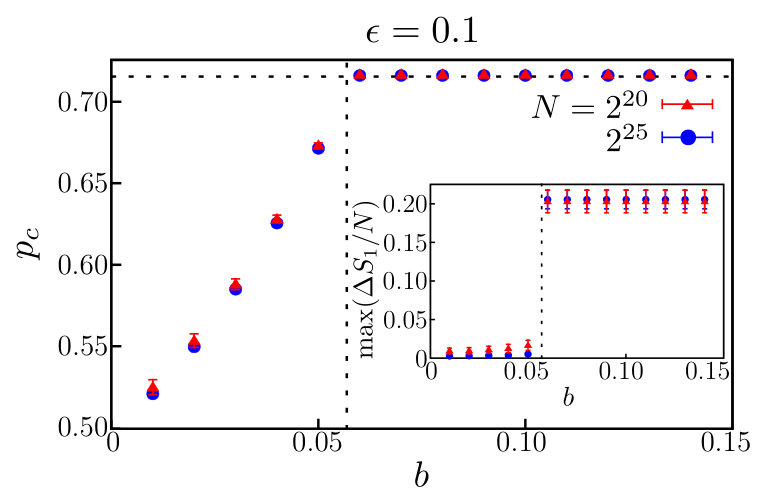 Figure 3
Figure 3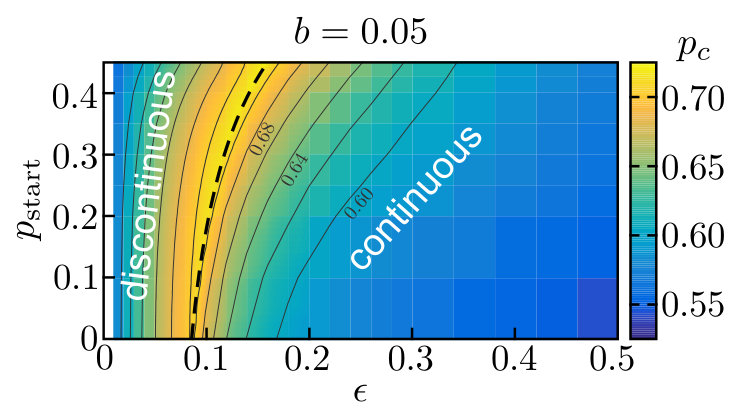 Figure 4
Figure 4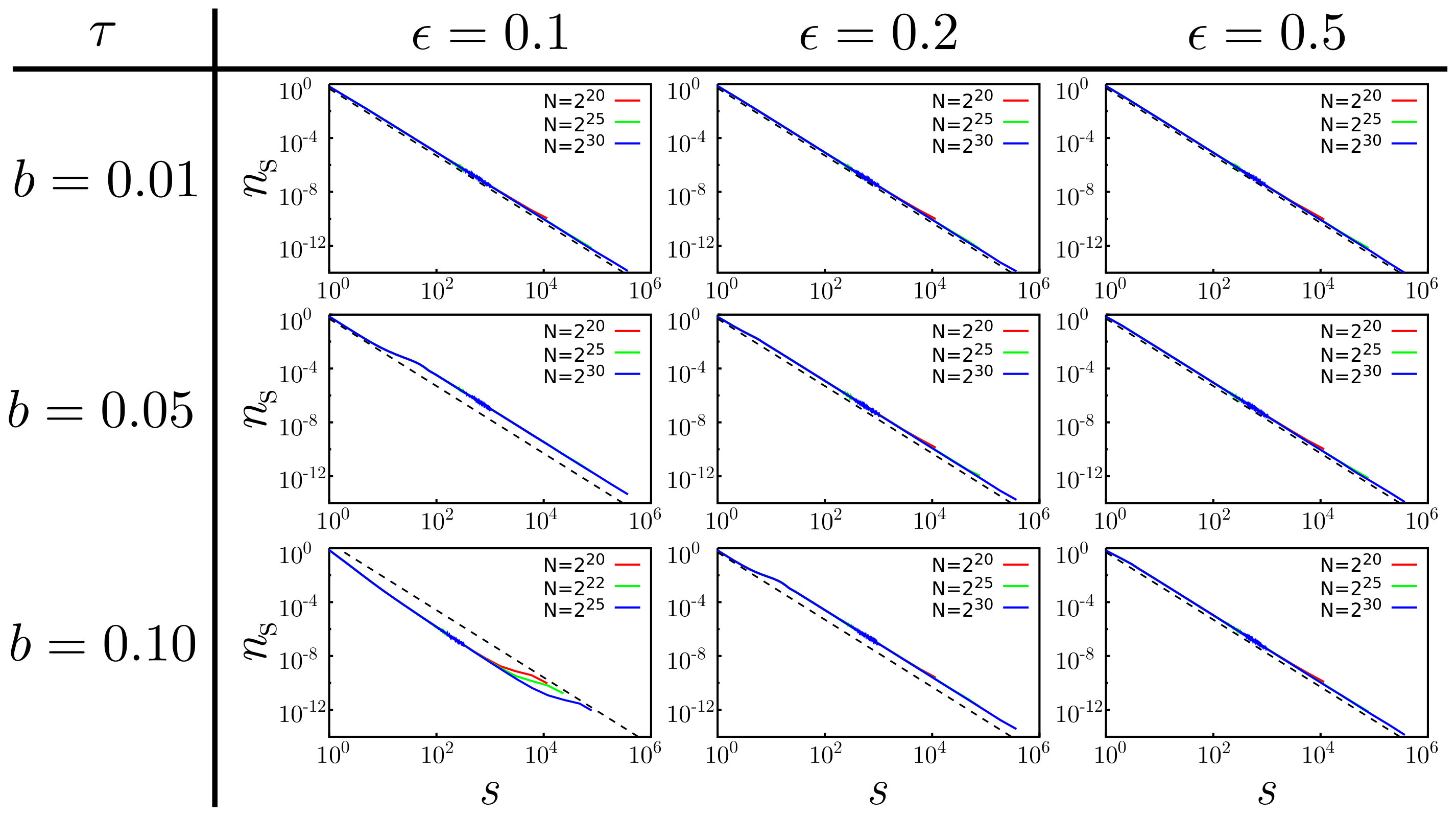 Figure 5
Figure 5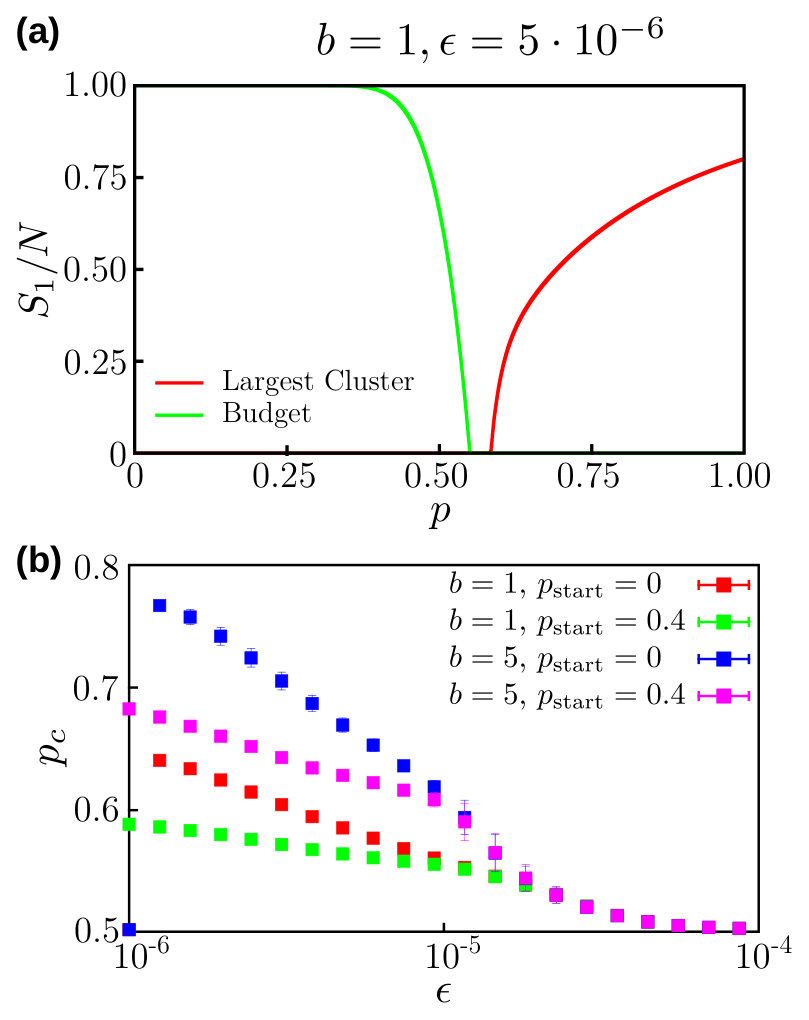 Figure 6
Figure 6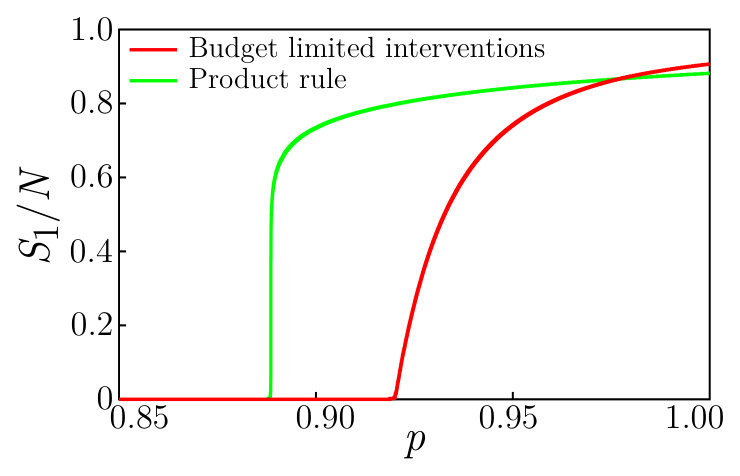 Figure 7
Figure 7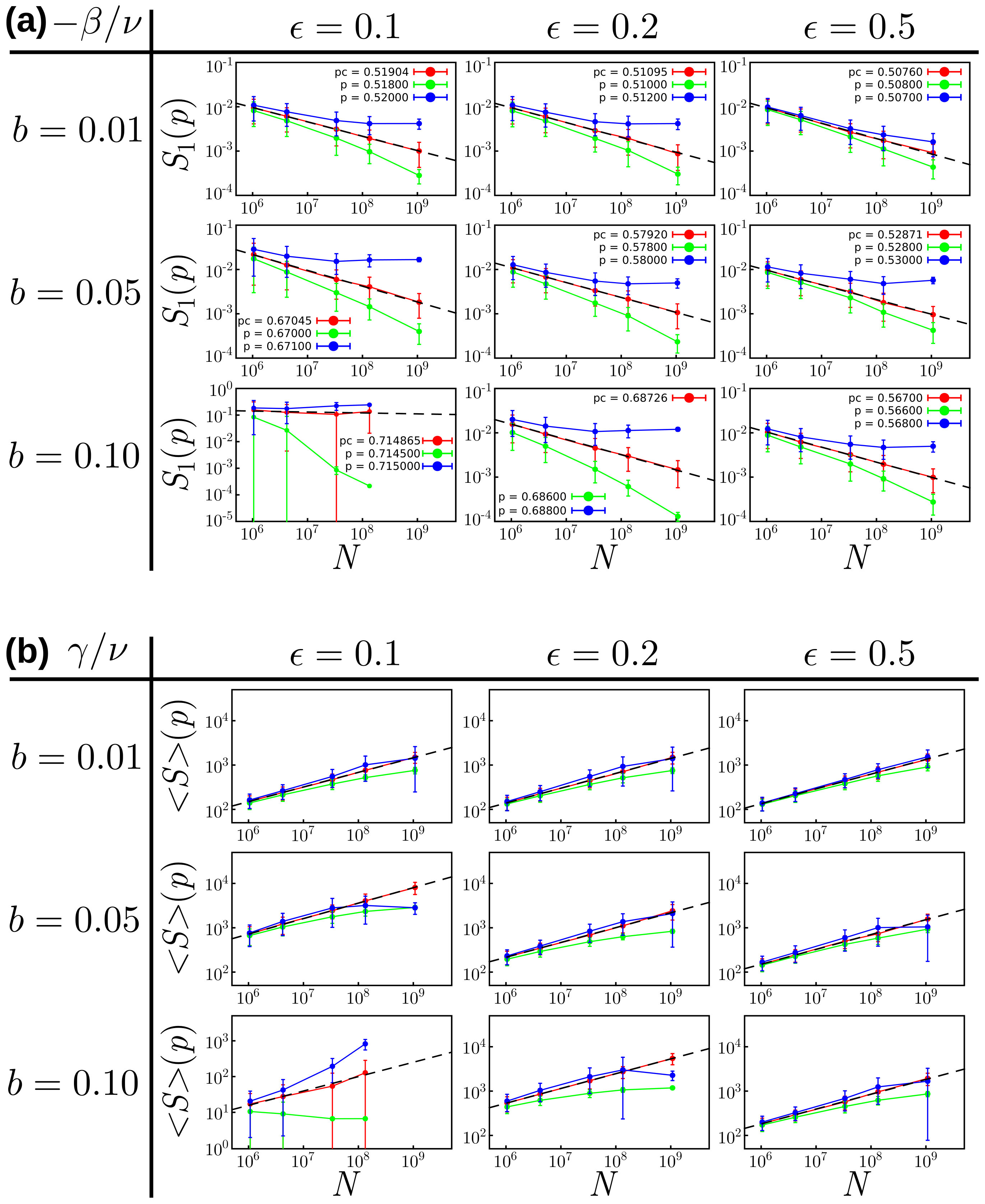 Figure 8
Figure 8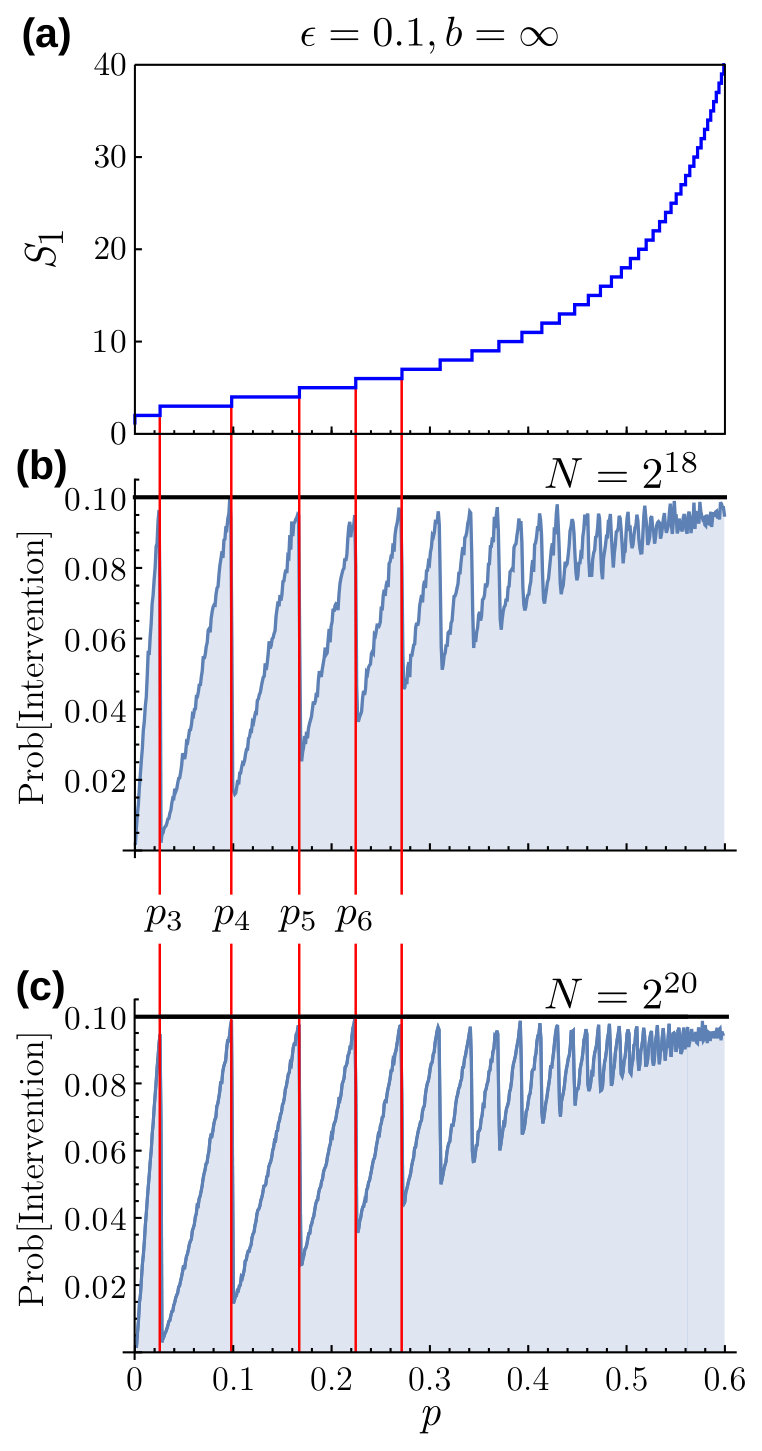 Figure 9
Figure 9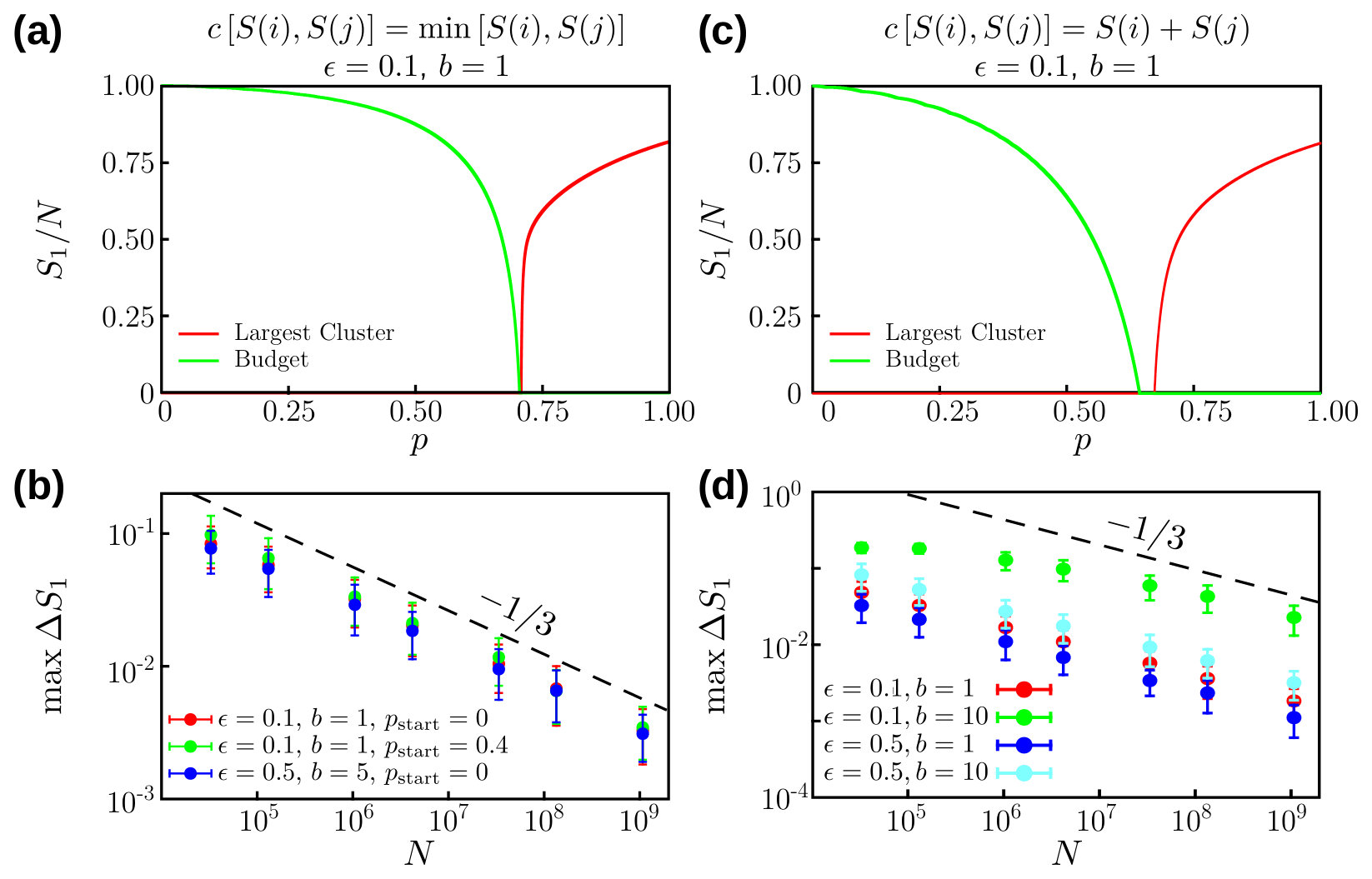 Figure 10
Figure 10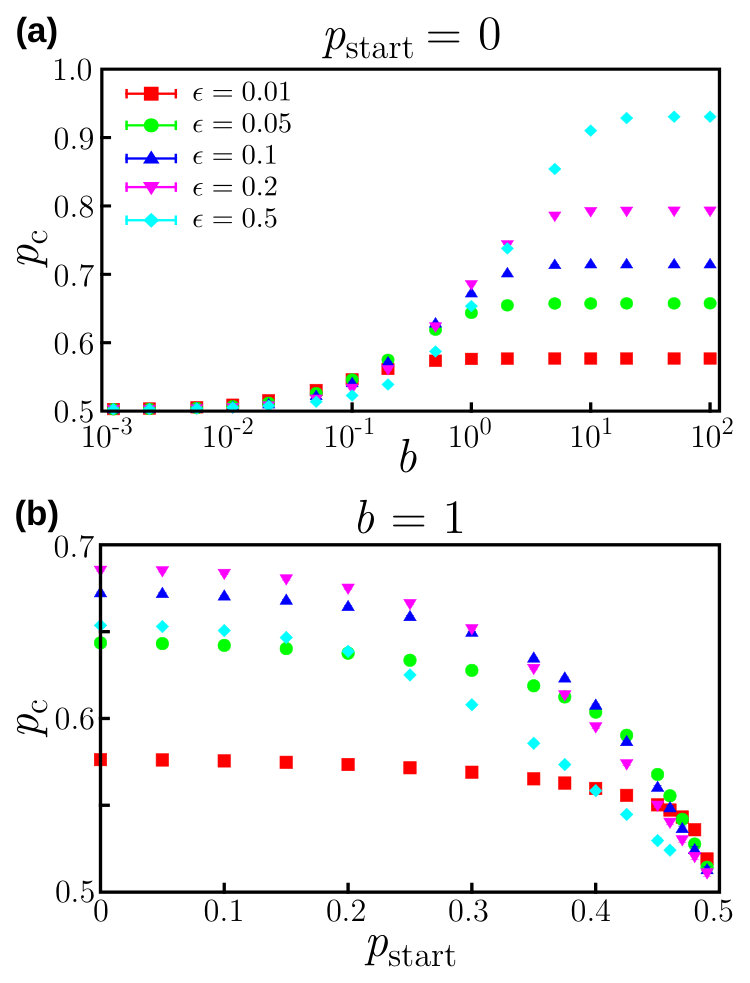 Figure 11
Figure 11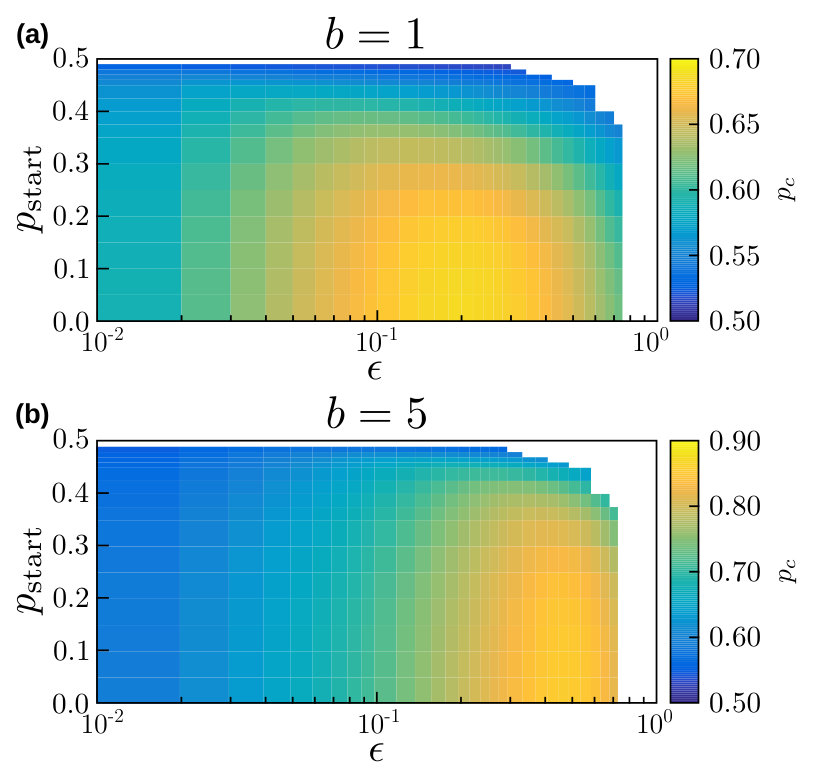 Figure 12
Figure 12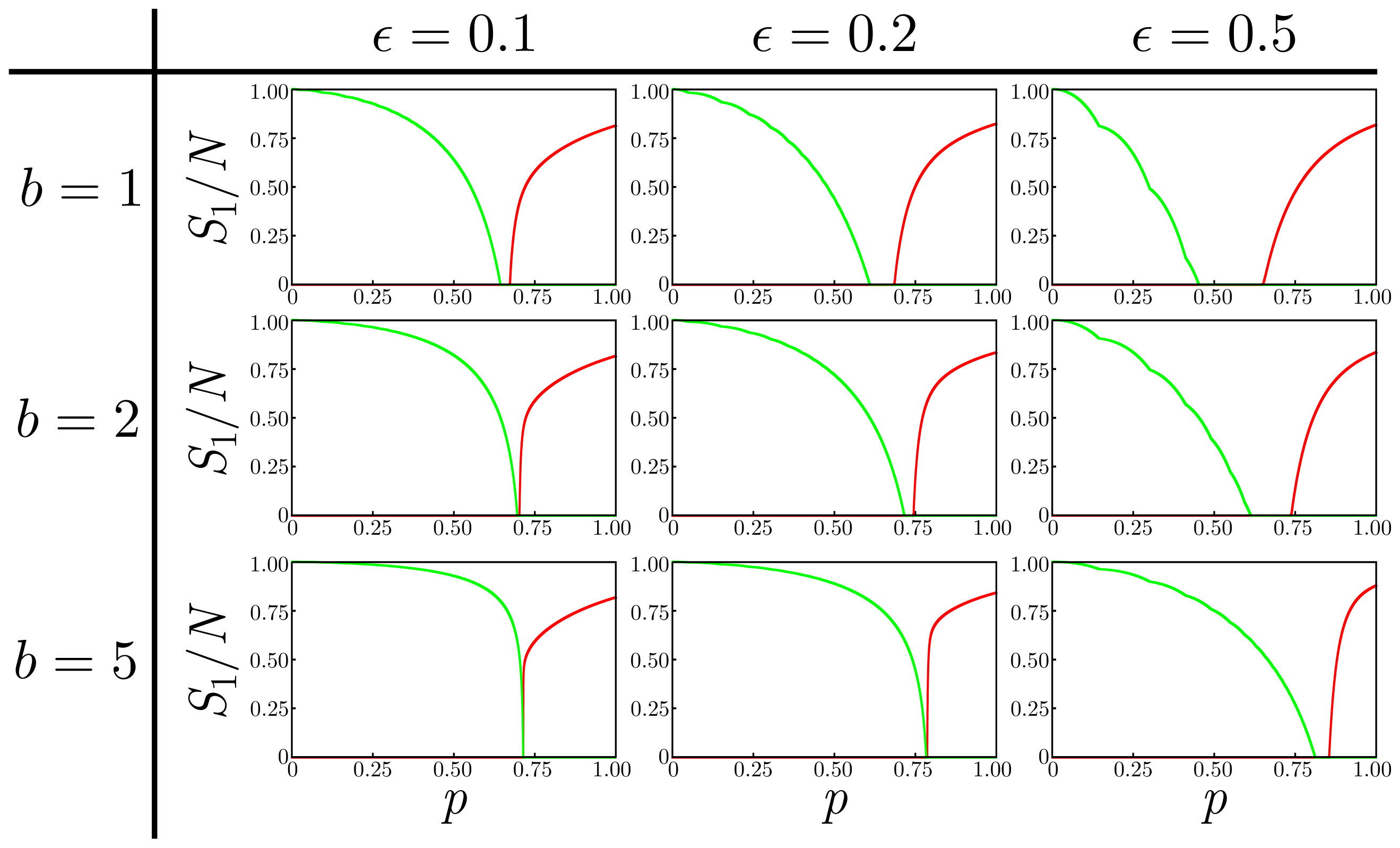 Figure 13
Figure 13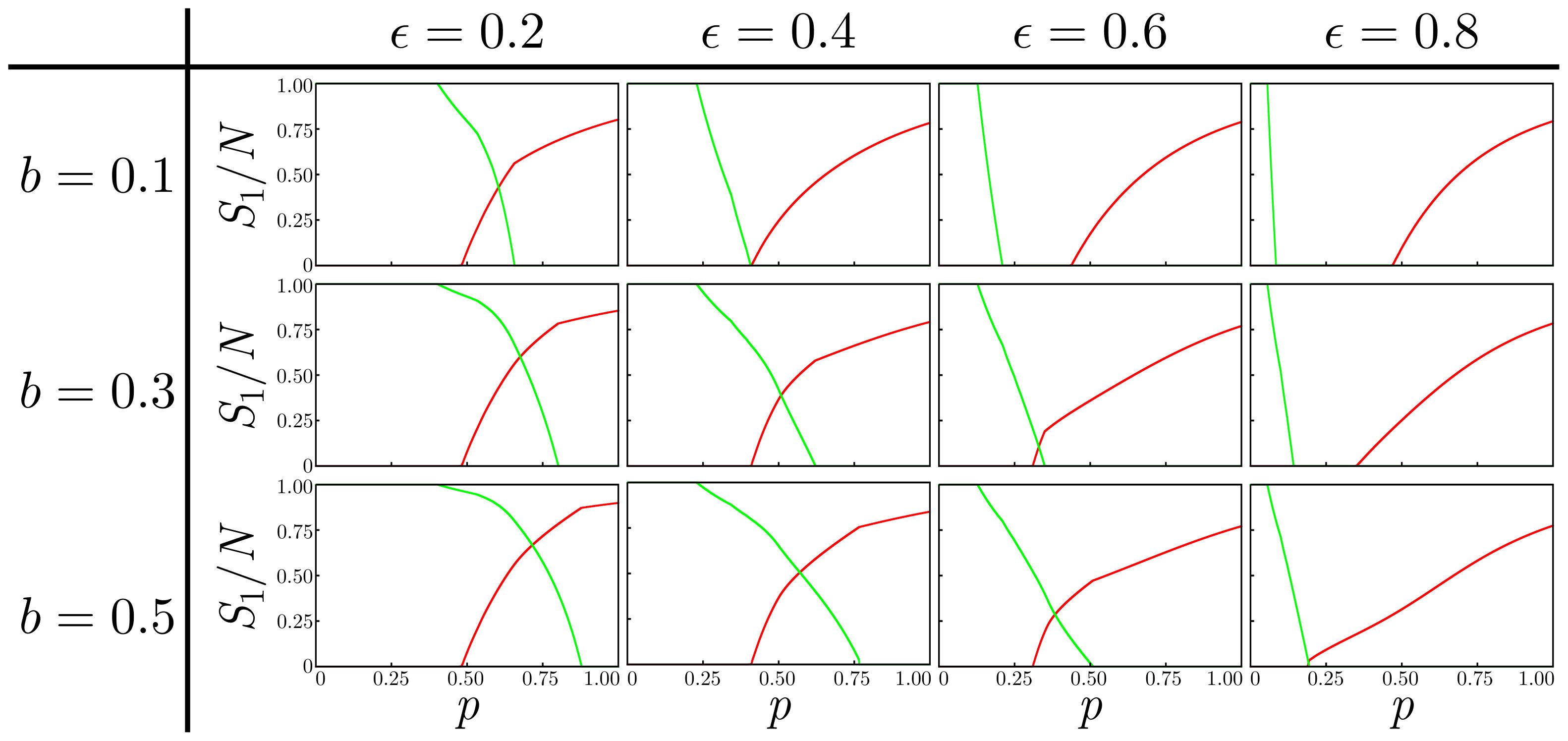 Figure 14
Figure 14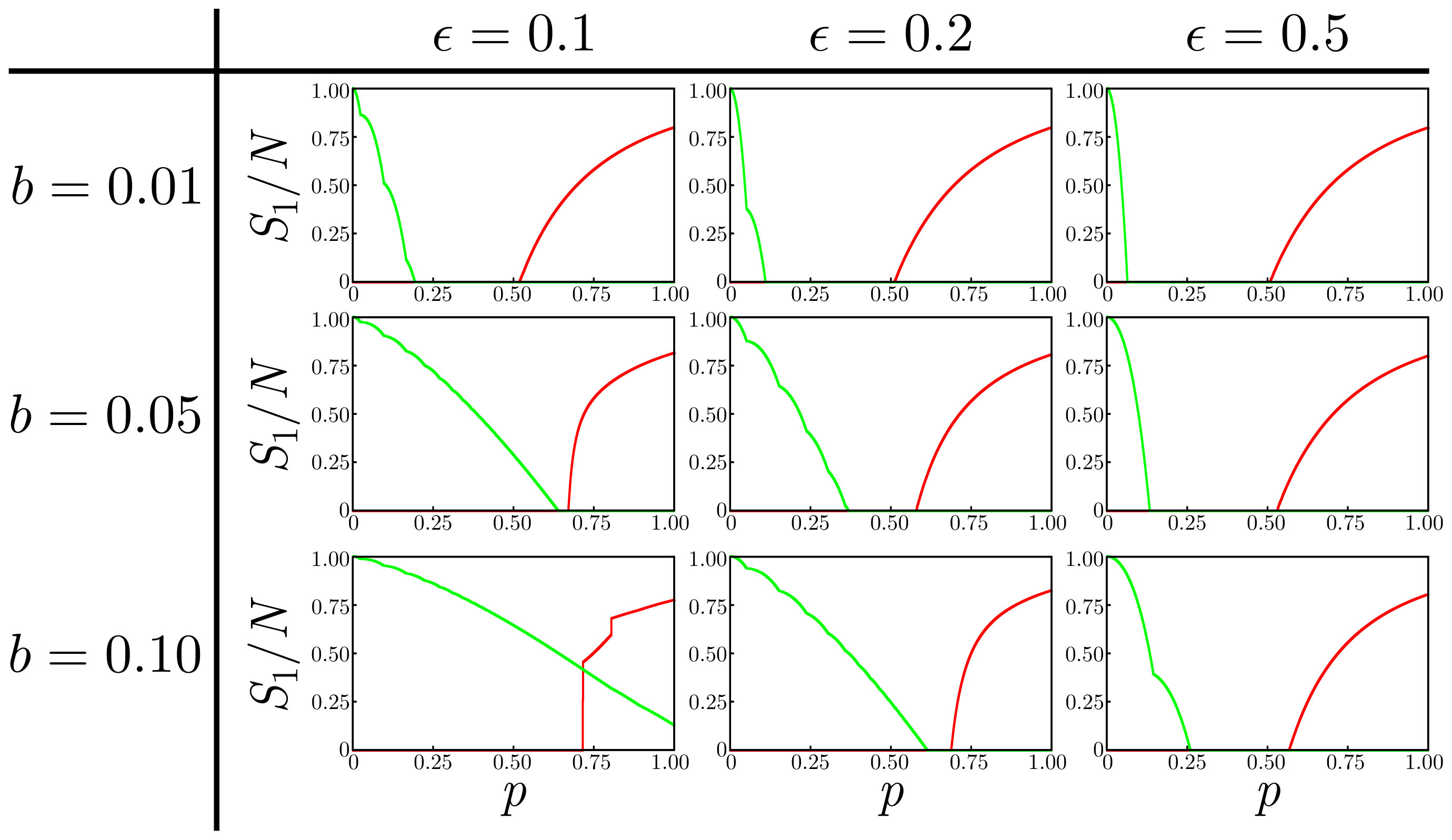 Figure 15
Figure 15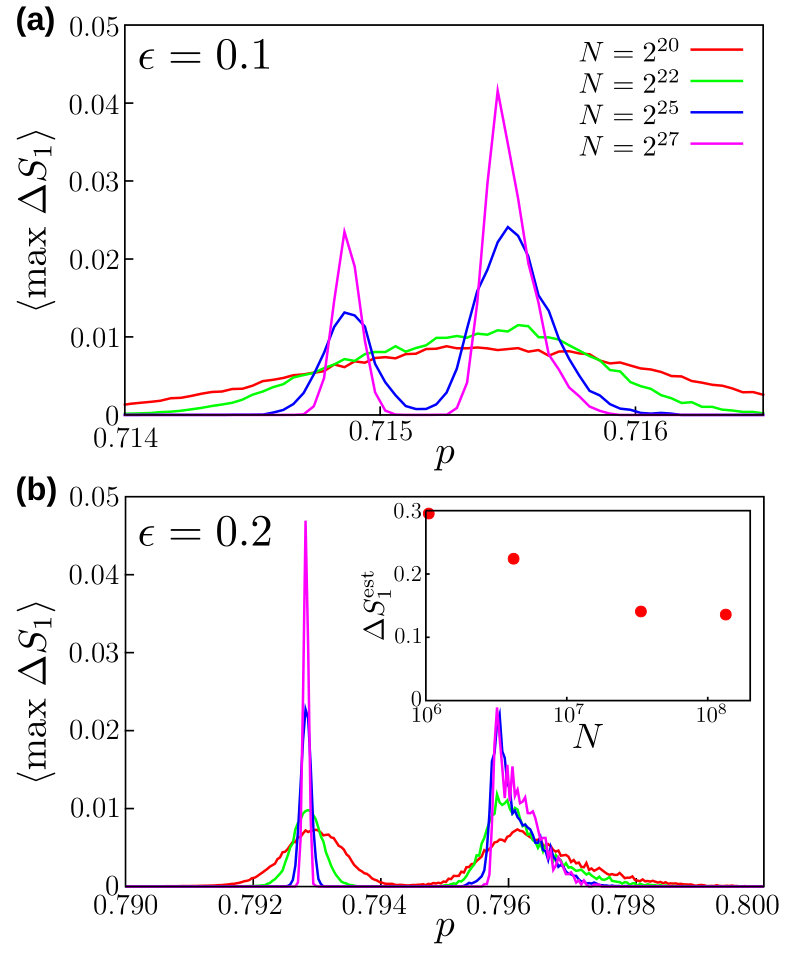 Figure 16
Figure 16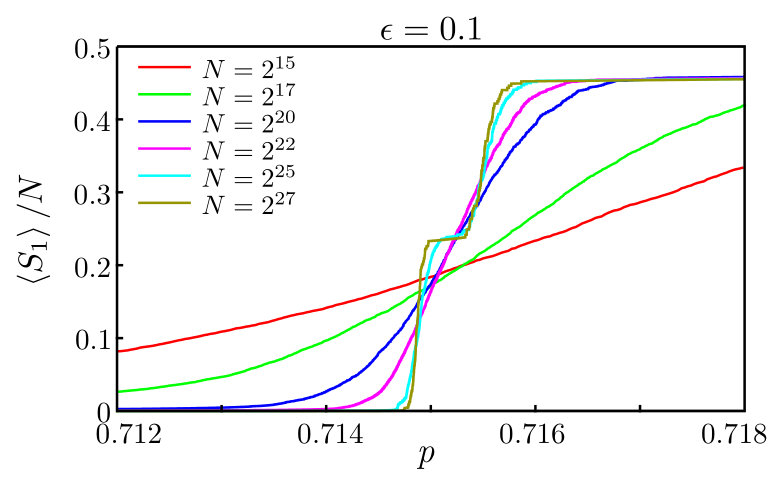 Figure 17
Figure 17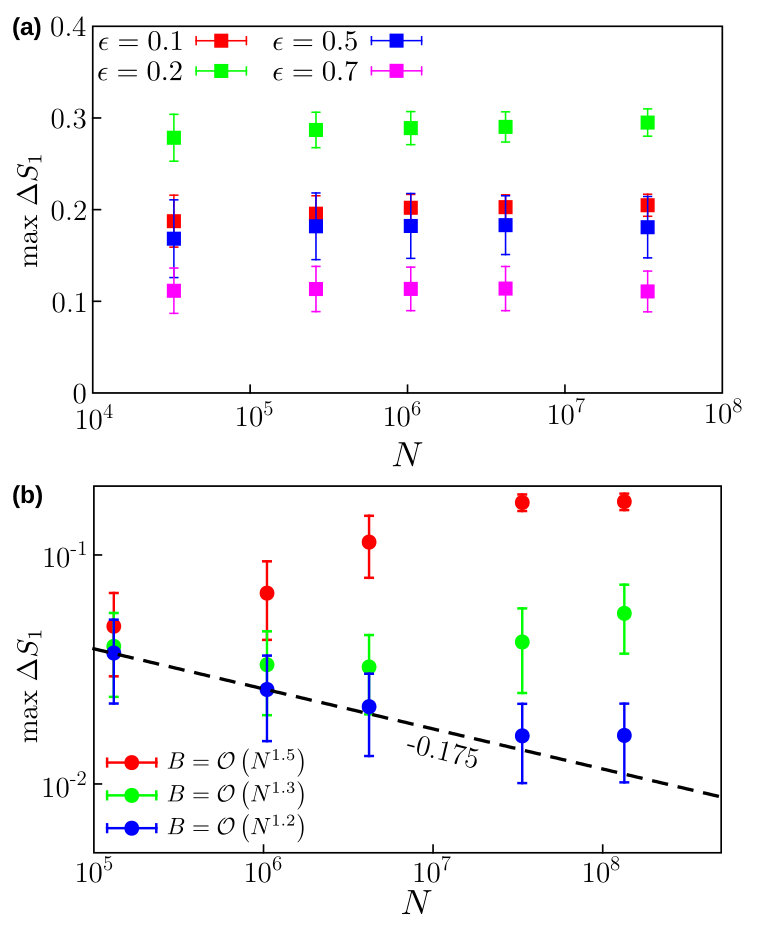 Figure 18
Figure 18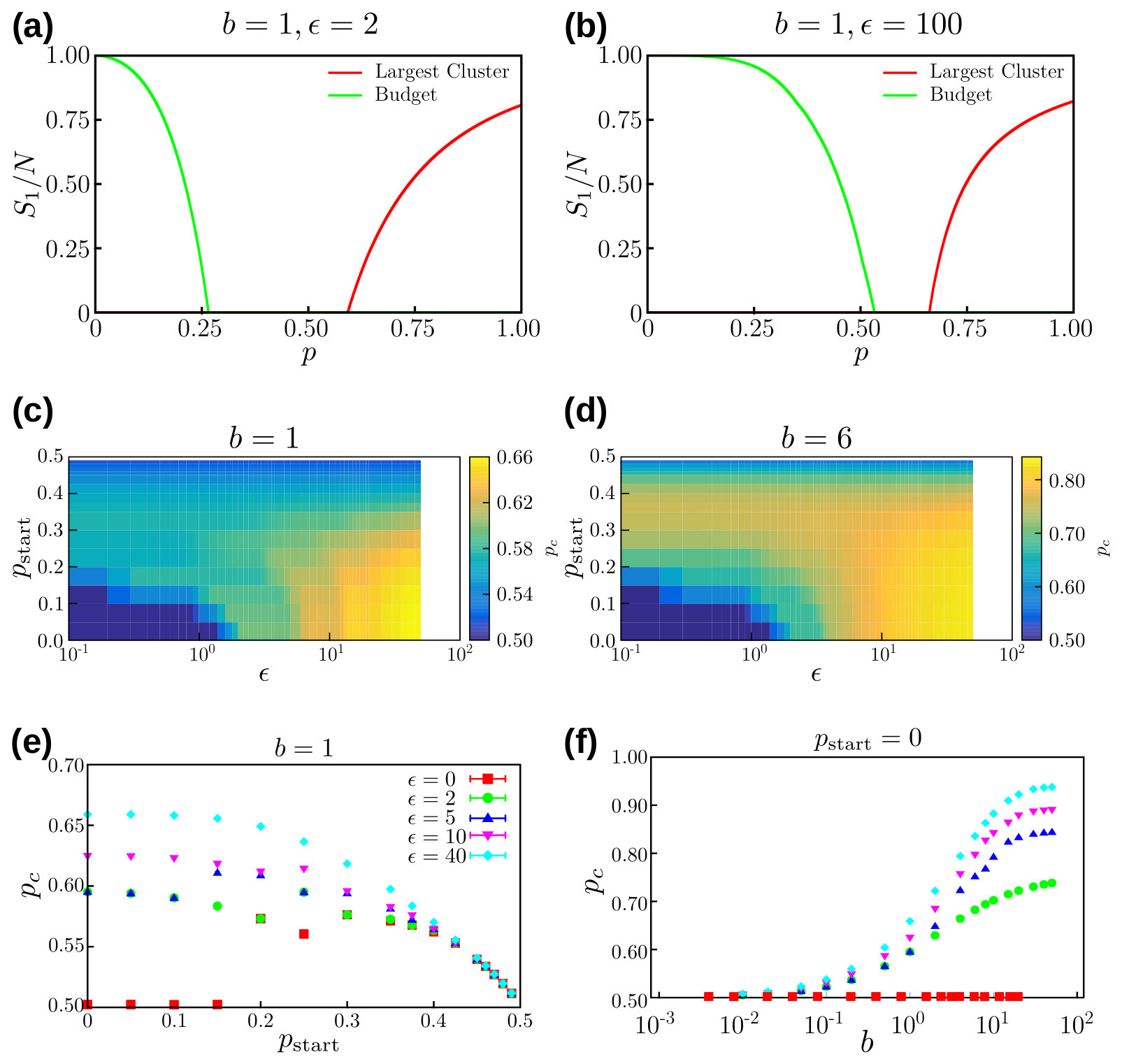 Figure 19
Figure 19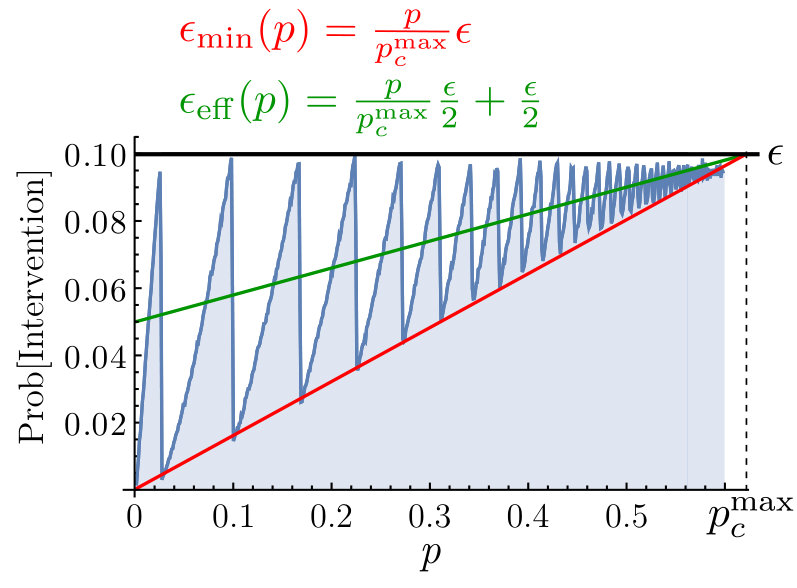 Figure 20
Figure 20| \ | |||
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Controlling percolation with limited resources
Malte Schröder
Network Dynamics, Max Planck Institute for Dynamics and Self-Organization (MPIDS), 37077 Göttingen, Germany
Nuno A. M. Araújo
Departamento de Física, Faculdade de Ciências, Universidade de Lisboa, P-1749-016 Lisboa, Portugal
Centro de Física Teórica e Computacional, Universidade de Lisboa, 1749-016 Lisboa, Portugal
Didier Sornette
Department of Management, Technology and Economics (D-MTEC), ETH Zürich, Scheuchzerstrasse 7, CH-8092 Zurich, Switzerland
Jan Nagler
Computational Physics for Engineering Materials, Institute for Building Materials, ETH Zürich, Wolfgang-Pauli-Strasse 27, HIT, CH-8093 Zurich, Switzerland
Abstract
Connectivity - or the lack thereof - is crucial for the function of many man-made systems, from financial and economic networks over epidemic spreading in social networks to technical infrastructure. Often, connections are deliberately established or removed to induce, maintain, or destroy global connectivity. Thus, there has been a great interest in understanding how to control percolation, the transition to large-scale connectivity. Previous work, however, studied control strategies assuming unlimited resources. Here, we depart from this unrealistic assumption and consider the effect of limited resources on the effectiveness of control. We show that, even for scarce resources, percolation can be controlled with an efficient intervention strategy. We derive this strategy and study its implications, revealing a discontinuous transition as an unintended side-effect of optimal control.
We are living in a globalized world. Large-scale connectivity, in particular, is essential for the proper functioning of many socio-economic and technical systems. Examples include technical networks like the internet Cohen et al. (2000, 2001); Buldyrev et al. (2010) or the world aviation network Verma et al. (2016) and a wide range of socio-economic and financial systems Gai and Kapadia (2010); Helbing (2013); Elliott et al. (2014). In other cases connectivity may be a liability, allowing the spreading of diseases and other contagion processes Moore and Newman (2000); Pastor-Satorras and Vespignani (2001); Cohen et al. (2003). Ideally, control of connectivity has the goal to prevent wide-spread failure, for example by immunizing a subset of the population to prevent an epidemic. Identifying efficient strategies that use minimal resources is an ongoing problem Pastor-Satorras and Vespignani (2002); Chen et al. (2008); Morone and Makse (2015). In many cases, however, one cannot completely prevent an undesirable transition, such as a recession or financial crisis, and tries to delay it as long as possible, often resulting in more severe consequences when the transition inevitably occurs Helbing (2013); Lee et al. (2017); Sornette and Cauwels (2014). Thus, it is essential to understand how to control and delay the emergence of connectivity under the constraint of limited resources and what such unintended consequences may be.
Percolation theory describes the emergence or breakdown of global connectivity depending on the structure of the underlying network with stochastic link addition processes Stauffer and Aharony (1992); Callaway et al. (2000); Cho et al. (2009); Cohen and Havlin (2010); Newman (2010). A large body of work has studied the impact of an unlimited number of small interventions in modified models of network growth with the goal to delay the percolation transition. Most of these processes are based on a specific link addition rule. Typically, two (or more) possible candidate links are evaluated at each step and the link is added that delays (or enhances) the percolation transition the most Achlioptas et al. (2009). This “competitive” percolation Nagler et al. (2011) leads to an extremely sudden, but still continuous transition, sometimes referred to as “explosive” da Costa et al. (2010); Riordan and Warnke (2011); Nagler et al. (2011). Other models introduce explicit control over the largest cluster, which further delays the transition and can result in a genuine discontinuous percolation transition Araújo and Herrmann (2010); Schrenk et al. (2011); Chen et al. (2013); Cho et al. (2013). Many more models with similar motivation have been studied, leading to a surprising diversity of phenomena Achlioptas et al. (2009); Cho et al. (2009); Radicchi and Fortunato (2009); Friedman and Landsberg (2009); da Costa et al. (2010); Grassberger et al. (2011); Nagler et al. (2011); Riordan and Warnke (2011, 2012); Schrenk et al. (2012); Chen et al. (2013); Schröder et al. (2013, 2016); D’Souza and Nagler (2015).
In all these examples control is inherent to the link addition process, implicitly assuming unlimited resources and allowing indefinite control. Control in realistic settings, however, will be restricted by limited resources. Here, we derive an efficient resource-limited control strategy to delay percolation and discuss the consequences for the resulting percolation transition. In particular, while the delayed transition remains smooth for sub-optimal interventions, optimizing the control parameters to maximize the delay results in a discontinuous transition.
Results
Model. We develop our framework to efficiently delay the percolation transition based on the prototypical model of classical network formation, percolation of a random graph: new links between nodes and are chosen uniformly at random and sequentially added to a set of initially unconnected nodes Erdös and Rényi (1960). We implement control of link addition by preventing the chosen link from being added (see Fig. 1). This control is costly and preventing a link incurs a cost , where and are the sizes of the respective connected components (clusters) that include the nodes and . Once a total budget is spent, we can no longer control the link addition process. We track the evolution of the relative size of the largest connected component as a function of the link density , where is the number of links added to the network. For the results presented here, the cost of an intervention is kept constant and we assume a budget that scales linearly with the number of nodes, , where is a (finite) constant. Corresponding results are obtained for other cost functions that scale with the size of the clusters, such as (see Supplementary Information). In this case, avoiding the transition completely would clearly require preventing most of the links, which is impossible with limited resources.
In order to efficiently utilize the available resources and decide which links to prevent, we derive a control protocol based on the effect of a single intervention. Consider preventing a link that, when added to the network, would create a cluster of size . If the next link creates a cluster of size , we spent some of our budget in vain, since we did not delay the emergence of a large cluster. Conversely, we can consider the intervention effective, when the next links only create smaller clusters and the emergence of a large cluster was delayed. Based on this idea we propose a control protocol where we prevent a link only if the expected impact is sufficiently large. We measure this impact by the (expected) number of links until a cluster of size at least appears again. Clearly, if is large, the intervention is more likely to delay the growth of a large cluster. If this delay is larger than some threshold , we consider the intervention effective and prevent the link, otherwise we do not intervene. In practice, we estimate the expected from the current cluster-size distribution as the inverse of the probability that a new link creates a cluster ,
[TABLE]
where the first sum describes the probability of a merger of clusters of different size resulting in a cluster at least as large as and the second sum describes similar mergers between clusters with equal size. For simplicity, we ignore that a link already present cannot be added again. Hence, we prevent a link from being added if , where denotes the “intervention intensity”, which is the expected link rejection rate. This protocol is equivalent to stopping the -fraction most extreme events during the percolation process given sufficient budget. Other control strategies based for example on constraining the variance of the cluster size distribution are less efficient but give qualitatively similar results (see Supplementary Information).
Efficient control of percolation. How much and how efficiently can the percolation transition be delayed with limited resources? As shown in Fig. 2, even with a small budget , meaning less than one intervention in ten link additions until , we can significantly delay the percolation transition compared to random percolation. Compared to the sudden transitions in the models of explosive percolation Achlioptas et al. (2009); da Costa et al. (2010); Riordan and Warnke (2011); Nagler et al. (2011); Grassberger et al. (2011); D’Souza and Nagler (2015), our control protocol is more effective in delaying the transition. Interestingly, the transition remains smooth and still belongs to the same universality class as random percolation when the budget is exhausted before the transition (see Supplementary Information for a finite size scaling analysis).
Note that in Fig. 2a the budget runs out at , before the percolation threshold , and the transition itself is uncontrolled. We can estimate how long the budget lasts: With a constant intervention rate we would expect interventions to occur during the sampling of links. During this period, we add only links. Taking , we find the budget used in this interval .
However, the budget decays nonlinearly, as seen in Fig. 2a, which means the true intervention rate also varies with . This nonlinear dependency results from the behaviour of the intervention rate oscillating around an effective linear increase , where is the position of the critical point of controlled percolation with intervention intensity and infinite budget (see Supplementary Information for details). This observation, together with integration over , then yields the closed expression defining
[TABLE]
As expected, a larger (effective) intervention rate requires a larger budget. Consequently, for a small budget, (i) the budget runs out before the onset of percolation at (interventions stop), (ii) the process is uncontrolled in a short but extensive window prior to the transition point, and (iii) one observes a continuous transition in the same universality class as random percolation. In contrast to previous percolation rules where delaying the transition changes its universality class, the limited resources in our model are exhausted before the transition. At this point the largest cluster has a fixed finite size and uncontrolled random percolation takes over, resulting in a continuous transition similar to random percolation for different initial cluster-size distributions Cho et al. (2010).
Optimal control leads to discontinuity. Increasing the budget also increases the delay of the transition. Interestingly, too large a budget also leads to a discontinuous transition (see Fig. 2b). At the same time, increasing the budget further does no longer increase the delay of the transition and becomes constant. Clearly, when the budget survives the percolation threshold, additional interventions have no effect on the transition. This suggests that the optimal delay is achieved for an optimal budget lasting exactly until the percolation threshold, . At the same time, no uncontrolled window exists before the transition and the transition becomes discontinuous.
A similar logic defines the optimal parameters for speeding up the percolation transition (see Supplementary Information): interventions taken after the transition have no effect while intervention-free uncontrolled link addition will reduce the effect of previous interventions. Optimal interventions necessarily end exactly at the percolation threshold, regardless of the intended result of the control.
Substituting in Eq.(4) as the largest observed value of the critical point, we predict the critical budget required for a discontinuous transition for to be . Indeed, this is confirmed by the numerical results shown in Fig. 3: the transition is continuous for , while the transition for is already discontinuous.
But how can the transition become discontinuous for ? Stopping the -fraction most extreme events prevents any cluster above a certain size to appear in the network. As more links are added, this threshold slowly increases. This is similar to the dynamics of the Bohman-Frieze-Wormald (BFW) model Bohman et al. (2004). In fact, we observe comparable behavior in the sub-critical regime: there is a hierarchy of thresholds , where a new largest cluster of size first appears. As in the BFW model, these converge to constant, finite values for large systems and announce the critical transition as for (see Supplementary Information). Thus, the same mechanism that leads to a discontinuous transition in the BFW model causes a discontinuous transition for optimal resource-limited control of percolation Bohman et al. (2004); Chen et al. (2013, 2014).
We have studied other control strategies and cost functions, for example cost proportional to the size of the clusters involved in the link, (see Supplementary Information). We find for all of the studied cost functions that a small budget leads to a continuous transition, whereas a larger budget further delays the transition and eventually leads to a discontinuous transition. However, when the cost scales with the size of the clusters, the transition only becomes discontinuous when the budget scales superlinearly with .
Limited observability. One realistic limitation to the control of connectivity is observability. In particular, we might not be aware of problems, such as emerging large clusters, early on in the process and only begin interventions after some time . Under these conditions, how do we best utilize a limited budget? Adapting equation (4) to include leads to the relation describing the optimal intervention parameters. Calculating the optimal start and intensity of the interventions with and the observed , we obtain a good agreement with the numerical results in Fig. 4. As explained above, the line of optimal control parameters separates the regimes of continuous and discontinuous transitions. As required by the constraint of limited resources our control scheme is much more efficient than explosive percolation models at controlling percolation: We achieve with only about one intervention per 15 added links, much less than comparable competitive percolation models, which reject one link for each link added (see Supplementary Information).
Interestingly, we find that for fixed intervention cost interventions close to the percolation threshold are slightly more effective than early interventions ( slowly increases as a function of along the critical line). This result, however, is specific to constant intervention costs as other cost functions can lead to a different behavior: interventions as early as possible, , are optimal for intervention costs that grow with the size of the connected clusters (see Supplementary Information).
Discussion
We have derived a control strategy to efficiently delay percolation with limited resources.
In contrast to previous models constructed to delay the percolation transition Achlioptas et al. (2009); da Costa et al. (2010); Riordan and Warnke (2011); Nagler et al. (2011); Grassberger et al. (2011); D’Souza and Nagler (2015), we find that the transition remains smooth and in the same universality class as random percolation for non-optimal control when the resources are exhausted before the transition. Given a fixed budget, maximal delay of the percolation transition is achieved by optimizing the control protocol such that the budget runs out exactly at the percolation threshold. While the percolation transition can be delayed by control interventions, this resource-optimal delay inevitably results in a discontinuous percolation transition that becomes effectively uncontrollable, since the addition of a single link induces a macroscopic change in the connectivity.
It is commonly believed that interventions taken as early as possible can have the biggest impact to avoid large-scale connectivity Helbing (2013). We have shown that this is not always the case: a strong effort to intervene right at the beginning can diminish the budget to such an extent that more timely interventions become impossible in crucial stages.
The framework we developed on the basis of random network growth highlights the unintended consequences of trying to control the percolation transition by delaying it Helbing (2013); Lee et al. (2017); Sornette and Cauwels (2014). Likely, similar effects will occur for other control schemes as well. This work may thus help to design control schemes in other networks, specific to the underlying network dynamics and its constraints, in particular when resources are scarce.
Acknowledgments. We gratefully acknowledge support from the Göttingen Graduate School for Neurosciences and Molecular Biosciences (DFG Grant GSC 226/2 [MS]), the Portuguese Foundation for Science and Technology (FCT) under Contracts nos. UID/FIS/00618/2013, and IF/00255/2013 [NA], and the ETH Risk Center (RC SP 08-15) [JN].
Finite size analysis
Here we present the results for the finite size analysis of resource-limited percolation as discussed in the main manuscript for different parameters. Fig. 6 shows single realizations for parameter combinations used in the finite size scaling analysis. The transition is continuous as long as the interventions end before the transition, as described in the main manuscript, unless the budget is large and the intervention intensity is small ().
We performed a finite size scaling analysis, assuming the scaling and for the size of the largest cluster and the mean cluster size, respectively, as well as the correlation length . The resulting exponents are listed in Tab. 1 and corresponding figures are shown in Fig. 8. For all continuous transitions the exponents agree well with those expected for random percolation. Additionally, the cluster size distribution at the critical point, shown in Fig. 7, decays with the same exponent as for random percolation, evidencing that controlled percolation remains in the same universality class as long as the transition is continuous. In particular, the transition never becomes “explosive” or “weakly discontinuous”.
We note that, while the results for and agree with a discontinuous transition, they are likely less accurate than those for the continuous case. For the specific parameter combination we observe two transition very close by that only resolve for very large system sizes (see Fig. 11 below), making it difficult to accurately determine the critical point and measure only the first transition.
Predicting and optimal intervention parameters
In the main manuscript we discussed the estimation of to predict when the interventions will end. This empirical approximation allowed us to accurately predict the critical intervention parameters, where the transition becomes discontinuous. Here, we present a detailed derivation of this approximation.
To begin, we first note that the intervention probability is not constant and equal to , as one might have expected from the definition of the intervention rule. As mentioned already in the main manuscript, the interventions are distributed non-uniformly. This is easiest to understand by considering the first link: we never prevent the first link since the probability to create a cluster of size is . Thus the probability of an intervention . Similarly, the first few links are unlikely to be prevented, since a link creating a cluster of size or larger is chosen with vanishing probability.
In fact, one can think about the intervention rule in the following way: We always prevent the most extreme links. This is equivalent to preventing all clusters above a certain size (until these links become too likely). This means, when the size of the largest cluster just changed to , the probability to create a larger cluster is usually smaller than . However, the links creating a cluster of size are not prevented as the probability to create a cluster larger or equal to is larger than . Thus, after these micro-transitions of the largest cluster size, the intervention probability drops. In fact, we find that these transitions to a new largest cluster size happen at well defined times, constant across different system sizes (see Fig. 9). This behavior is very similar to the sub-critical evolution of the BFW (Bohman-Frieze-Wormald) model Bohman et al. (2004); Chen et al. (2014). This similarity also supports the discontinuity of the transition as in the BFW model, when the interventions last until after the critical point.
We can use this observation to derive an (empirical) estimate for the budget used for interventions up to . To reiterate the basic idea described in the main manuscript, given a constant intervention rate we would expect interventions to occur during the sampling of links. During this period, we add only links. With constant intervention costs, the number of interventions directly correspond to the budget used during this interval and we obtain .
However, as discussed above, the true intervention rate is not constant. For an accurate estimation we need to use a varying intervention rate. Since we do not know the exact form of , we use an empirically determined “effective intervention rate” , describing a local average of (illustrated in Fig. 10 for ). This intervention rate depends on the intervention parameter and the position of the critical point of the process with unlimited budget. In principle we could use the same function when , however, due to the uncontrolled evolution, the intervention rate will likely be larger. To accommodate for this, we assume that the effective intervention rate at is (the value obtained with for the equation in Fig. 10, as percolation is uncontrolled before ). Directly at and after the effective intervention rate is . Together this gives
[TABLE]
We can now use the argument we gave above and integrate Eq. (3) over all interventions to find the total budget used. We arrive at the approximate relation
[TABLE]
assuming again is the critical point of the process with parameters and given unlimited budget.
Substituting gives the condition for optimal intervention parameters, which can be solved numerically (see Fig. 4 in the main manuscript). The quality of the estimate deteriorates for very large values of and and small values of , where interventions occur only in a small interval and averaging to becomes inaccurate. For the same reason, the effective intervention rate is a good approximation when estimating the optimal intervention parameters, where interventions last until and the error from averaging is small.
Unlimited budget — discontinuous transition
To clearly show the discontinuity of the transition when the budget survives until the transition we now consider interventions with an unlimited budget in more detail. We study the largest gap of the largest cluster, following a method from Schrenk et al. (2012) to resolve multiple jumps of the size of the largest cluster. We divide the region around the transition into intervals of width and record the largest jump in each of these intervals (Fig. 12). While the transition is blurred out for small systems, a double transition is revealed for larger system sizes. The same behavior can also be seen for averages over the multiple realizations shown in Fig. 11.
We find that the largest gap of the first transition does not decay for increasing system size (even taking into account the smaller spread and thus expected larger averages). In the case of , we can quantify this by assuming a single large jump of size and negligible contributions of all other changes for a given realization (this approximation becomes better the larger the system). If this assumption is correct, the resulting average should simply be the product of the size of the jump and the probability that the jump occurs in a given interval. Consequently, we can (approximately) determine the size of the jump by fitting a Gaussian distribution multiplied by to the measured average jump size. We find for the smallest system decaying to only for the larger systems and . The fact that does not decay to zero shows that the jump is indeed macroscopic and the transition is discontinuous (Fig. 12, inset).
Enhancing percolation
So far, we have discussed only interventions to delay the percolation transition. Interestingly, the same logic describing the optimal intervention strategy also applies to enhance percolation. Instead of stopping the -fraction most extreme events, we simply stop the -fraction least extreme events (specifically including links connecting nodes in the same cluster). We use constant intervention costs , as in the main manuscript. Again, optimal interventions for constant costs necessarily end at the percolation threshold. Interventions lasting longer have no additional effect on the threshold and interventions ending earlier create an extensive interval of uncontrolled percolation before the transition, partially negating the effect of the interventions.
In Fig. 13 we show examples for single realizations of percolation enhancing interventions. The results confirm that the effect is largest ( is smallest when the budget runs out exactly at . Interestingly, the transition also becomes steeper at when the interventions last until (after) the percolation threshold. Thus, also in the case of enhancing percolation, optimal control inherently leads to reduced controllability of the transition.
Resource-limited control of percolation under various cost functions
In order to illustrate the universality of our results, in the following we consider control of percolation using different cost functions as well as intervention rules based on other observables. First, we discuss a theoretical argument, why our results naturally extend to different cost functions.
Due to the self-averaging behavior of the percolation model, the number of interventions for a given cost function with given parameters and is fixed with a negligible variance (relative to the system size). For large systems we thus find a direct correspondence to a system with constant cost and parameters and , where is simply given as the average number of interventions.
We mostly discuss results using the cost function , where the cost of an intervention scales with the size of the clusters involved. In this case, for any budget with constant we always observe a continuous transition (this means the corresponding ). This is illustrated in an overview of single realizations in Fig. 14. This can be understood with the following (rough) argument: consider the average budget used for interventions up to a point
[TABLE]
With the standard assumption for the critical scaling this integral is finite for all but diverges at . Thus any constant, finite budget will run out at some point , regardless of the value of , and the transition will be continuous. Conversely, we can reach any with a finite budget . We can thus establish a direct mapping between the two cost functions with for and for constant cost (main manuscript). A delayed start of the interventions at does not qualitatively change this mapping.
Due to the different cost of interventions, it becomes much more important to intervene early, when interventions are cheap. Finding the optimal for a given budget now does not mean keeping the interventions up the longest: if the intensity is too large we prevent relatively unimportant links. If the intensity is too small, some interventions are executed close to the critical point and are very costly, reducing the total number of interventions. The optimal delay is obtained for intermediate values of , balancing the observed effectiveness of interventions close to the critical point (see main manuscript) with the increasing costs.
The resulting delay of the percolation transition for various parameters, shown in detail in Fig. 15 and 16, illustrates the findings summarized above: (i) a larger budget will always increase the delay of the percolation transition (Fig. 15a), (ii) starting the interventions early and (iii) using an intermediate intensity results in the largest delay of (Fig. 15b, 16).
However, we recover the discontinuous transition observed in the main manuscript for superlinear budget scaling with (Fig. 17). This is required for interventions to last until (after) the percolation transition, where a single intervention will (likely) cost an extensive amount . Specifically, considering the scaling of the cluster sizes before the transition, we can expect a critical budget on the order of . However, strong finite size effects make this prediction impossible to verify numerically.
To further illustrate the generality of these results, depending only on the scaling but not the specific choice of the cost function, we considered other intervention cost functions, specifically and as above (Fig. 18), as well as (not shown) with equivalent results. Note that cost scale linearly with the size of the clusters in all cases. In all cases we can map the parameters to corresponding parameters for constant intervention cost with a budget as discussed above.
Similarly, we consider different intervention rules. In the main manuscript we derived the intervention rule using an intuitive argument to achieve at least a given effectiveness of the intervention. Here we explicitly demonstrate other intervention rules (Fig. 19 and 20), showing that the qualitative behavior is similar. We again consider intervention cost proportional to the size of the clusters .
Specifically, we consider an intervention rule based on the variance of the cluster size distribution: we prevent a link if the change of the variance is larger than a certain threshold , in order to keep cluster sizes in the network similar (and thus prevent large clusters). While this rule is less complex numerically, as we can track the variance as the network grows, it is also less efficient than the protocol derived in the main manuscript. Additionally, the threshold does not easily scale with the system size: the scaling changes depending on the shape of the cluster size distribution at any given time.
Similarly, we consider the entropy instead of the variance, where is the probability that a random cluster has size . In both cases we find qualitatively similar results as above: interventions should be applied early and with an intermediate threshold (intensity) adjusted to the budget.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Cohen et al. (2000) R. Cohen, K. Erez, D. ben Avraham, and S. Havlin, Phys. Rev. Lett., 85 , 4626 (2000).
- 2Cohen et al. (2001) R. Cohen, K. Erez, D. ben Avraham, and S. Havlin, Phys. Rev. Lett., 86 , 3682 (2001).
- 3Buldyrev et al. (2010) S. V. Buldyrev, R. Parshani, G. Paul, H. E. Stanley, and S. Havlin, Nature, 464 , 1025 (2010).
- 4Verma et al. (2016) T. Verma, F. Russmann, N. A. M. Araújo, J. Nagler, and H. J. Herrmann, Nat. Commun., 7 , 10441 (2016).
- 5Gai and Kapadia (2010) P. Gai and S. Kapadia (2010) p. 2401, ISSN 1364-5021.
- 6Helbing (2013) D. Helbing, Nature, 497 , 51 (2013).
- 7Elliott et al. (2014) M. Elliott, B. Golub, and M. O. Jackson, Am. Econ. Rev., 104 , 3115 (2014).
- 8Moore and Newman (2000) C. Moore and M. E. J. Newman, Phys. Rev. E, 61 , 5678 (2000).