A Comprehensive Review of Smart Wheelchairs: Past, Present and Future
Jesse Leaman, Hung M. La

TL;DR
This paper provides a comprehensive review of smart wheelchair research, covering technological advancements, current trends, and future directions to improve mobility for users with disabilities.
Contribution
It offers the first systematic overview of smart wheelchair research, highlighting key innovations and identifying future research priorities.
Findings
Identified major technological trends in SW development
Highlighted research focus areas with most interest
Outlined future directions for SW innovation
Abstract
A smart wheelchair (SW) is a power wheelchair (PW) to which computers, sensors, and assistive technology are attached. In the past decade, there has been little effort to provide a systematic review of SW research. This paper aims to provide a complete state-of-the-art overview of SW research trends. We expect that the information gathered in this study will enhance awareness of the status of contemporary PW as well as SW technology, and increase the functional mobility of people who use PWs. We systematically present the international SW research effort, starting with an introduction to power wheelchairs and the communities they serve. Then we discuss in detail the SW and associated technological innovations with an emphasis on the most researched areas, generating the most interest for future research and development. We conclude with our vision for the future of SW research and how…
Click any figure to enlarge with its caption.
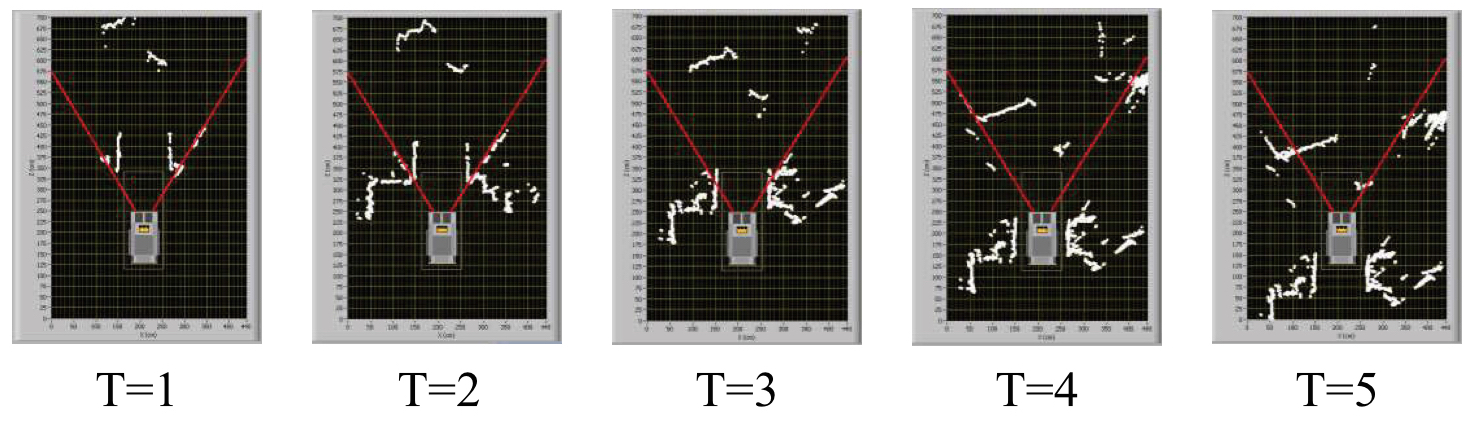 Figure 1
Figure 1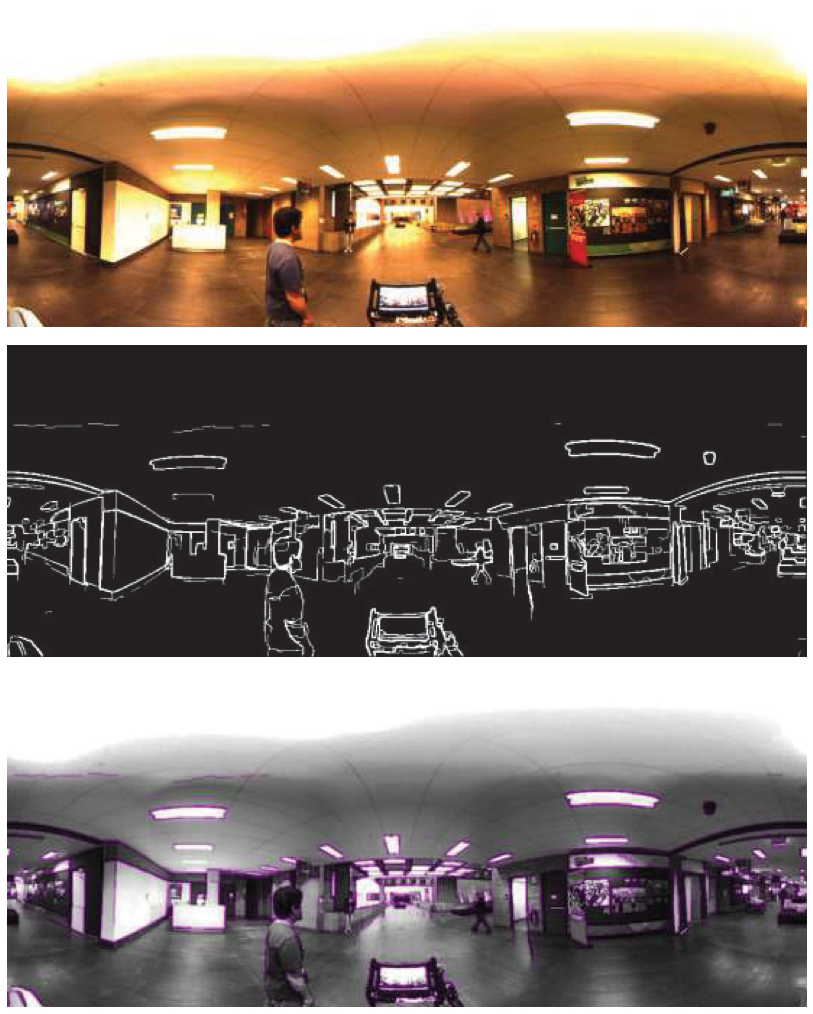 Figure 2
Figure 2 Figure 3
Figure 3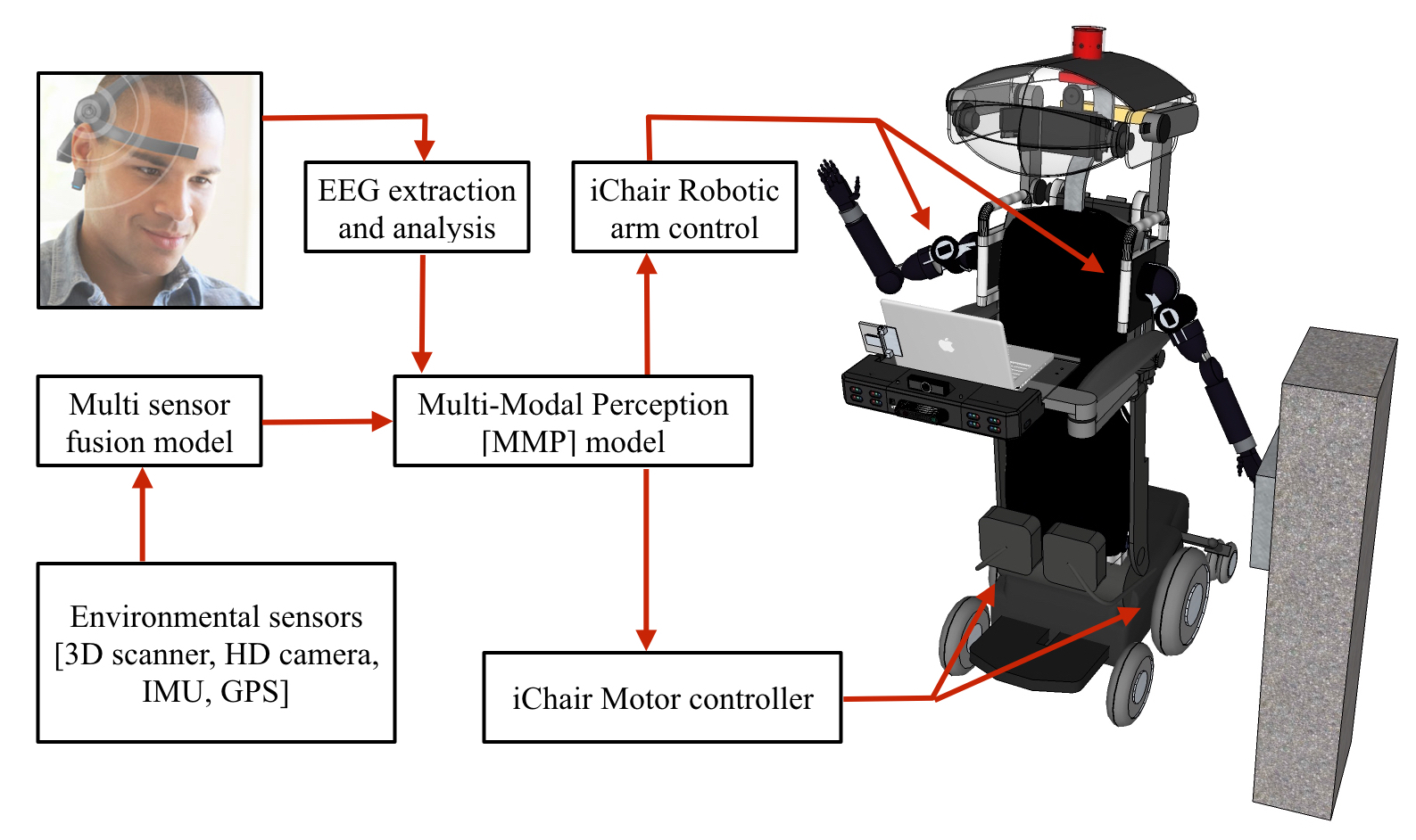 Figure 4
Figure 4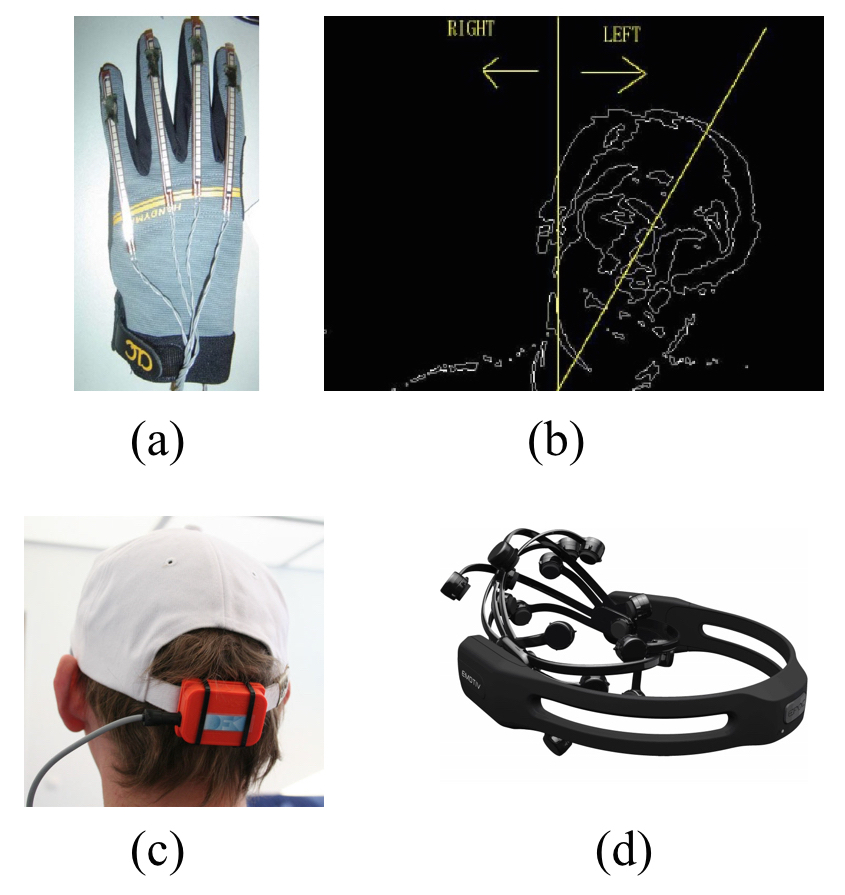 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7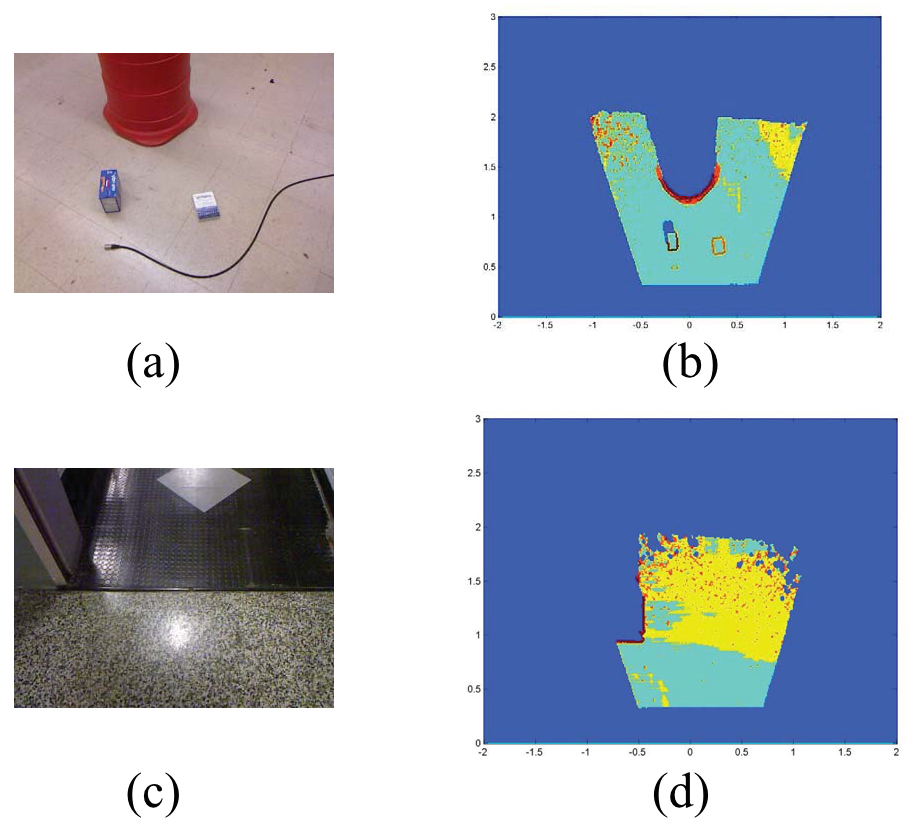 Figure 8
Figure 8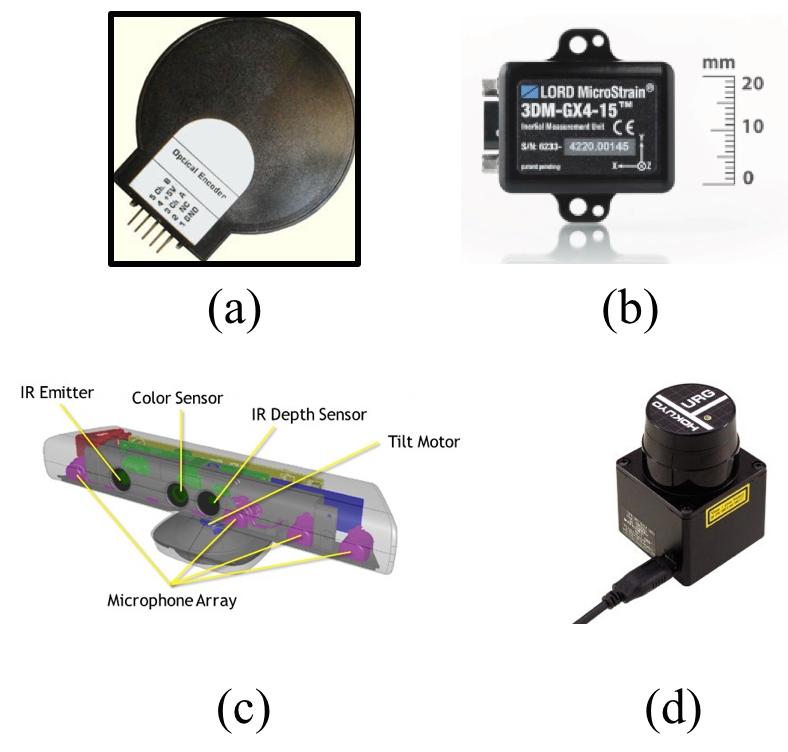 Figure 9
Figure 9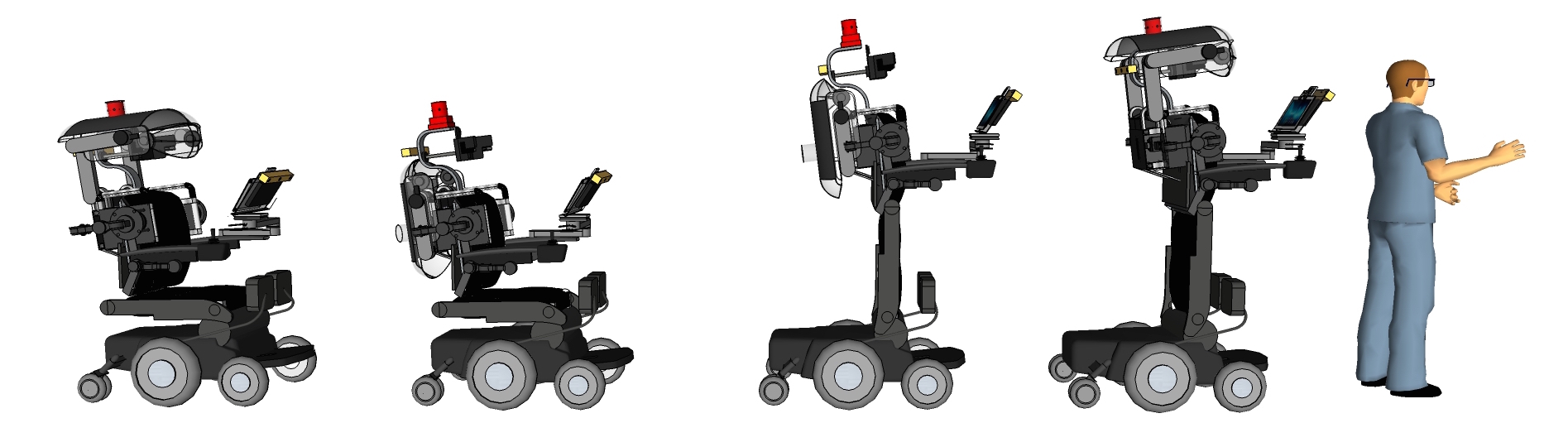 Figure 10
Figure 10 Figure 11
Figure 11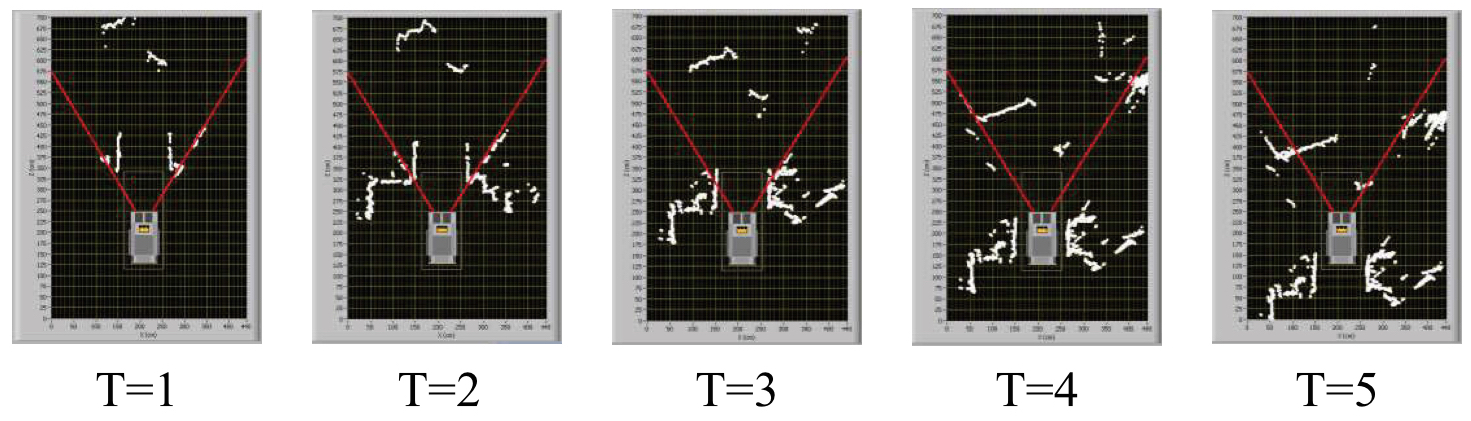 Figure 12
Figure 12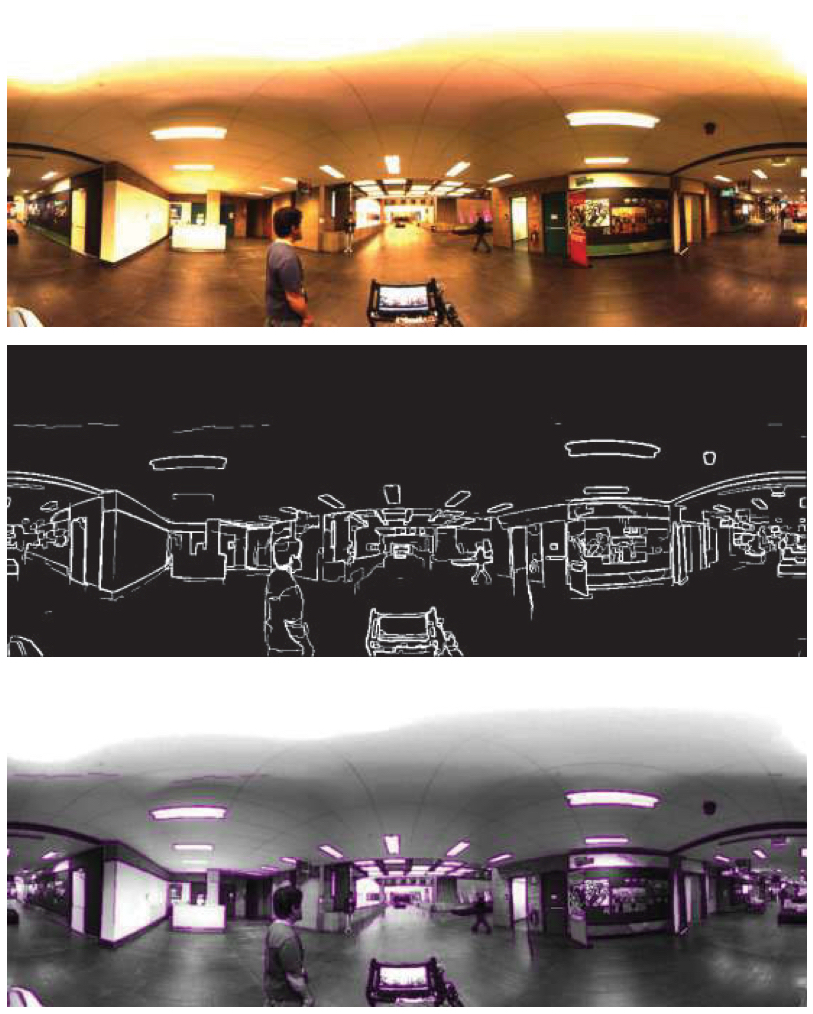 Figure 13
Figure 13 Figure 14
Figure 14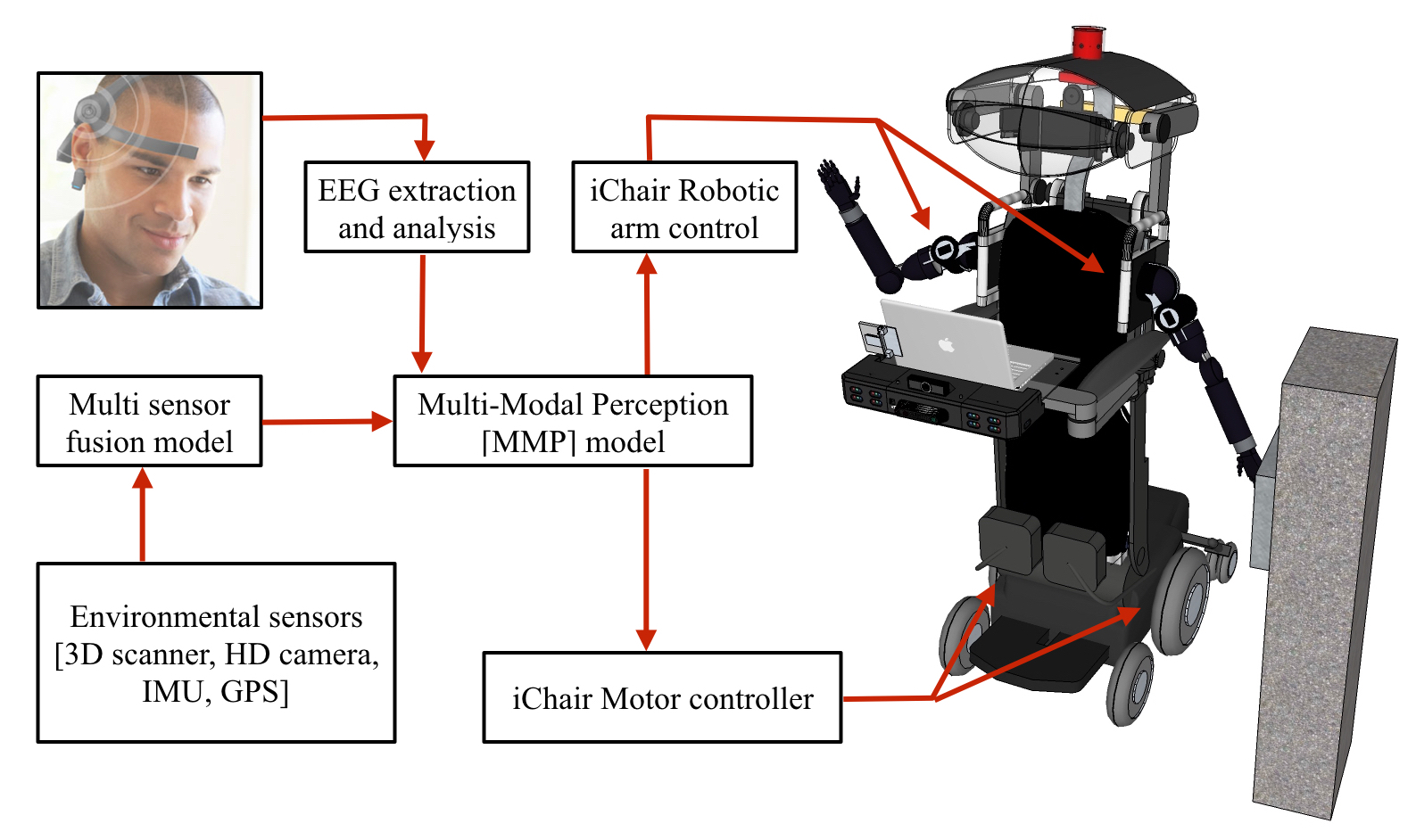 Figure 15
Figure 15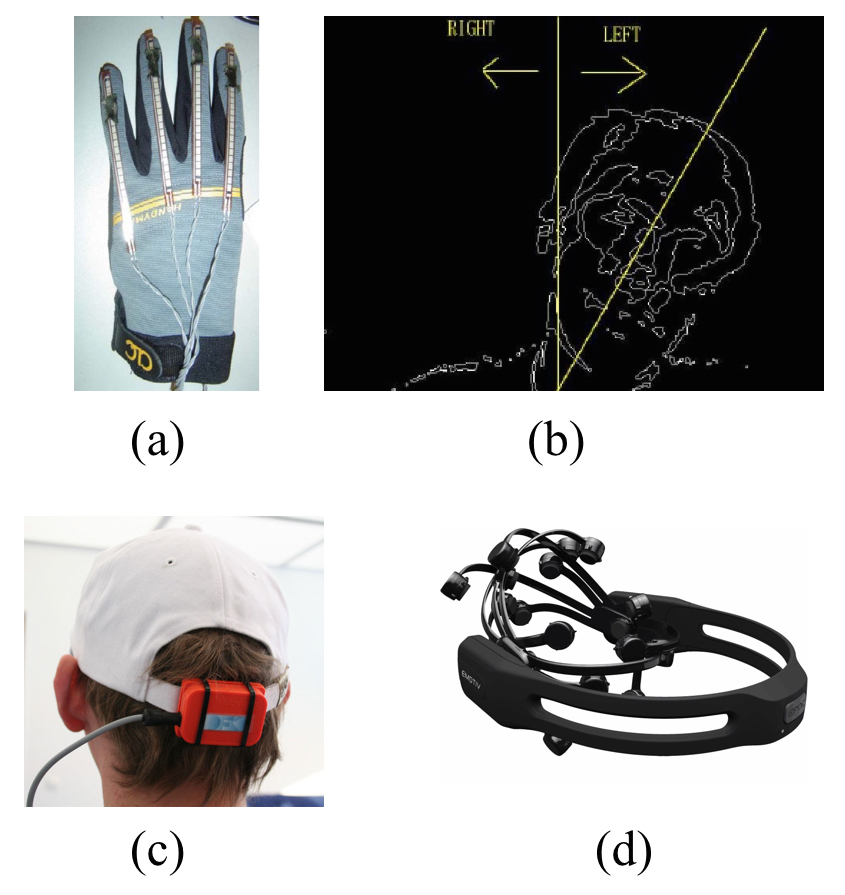 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18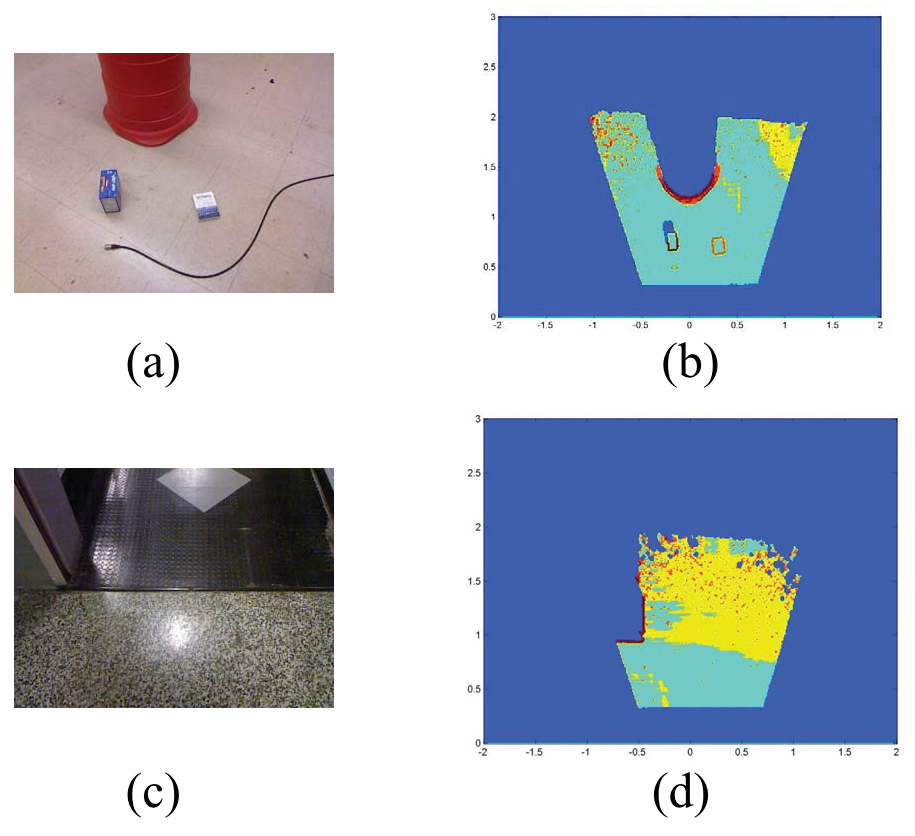 Figure 19
Figure 19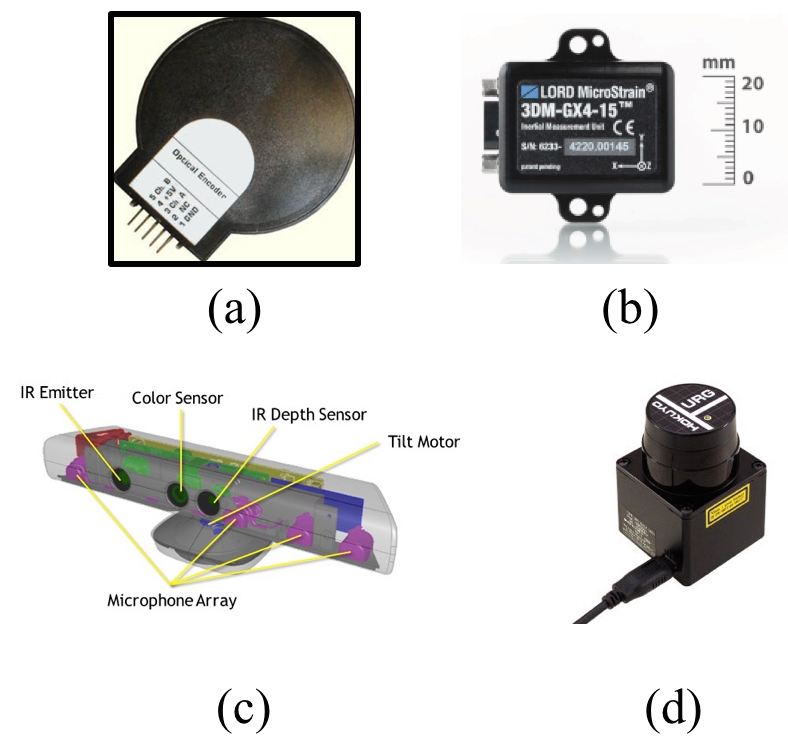 Figure 20
Figure 20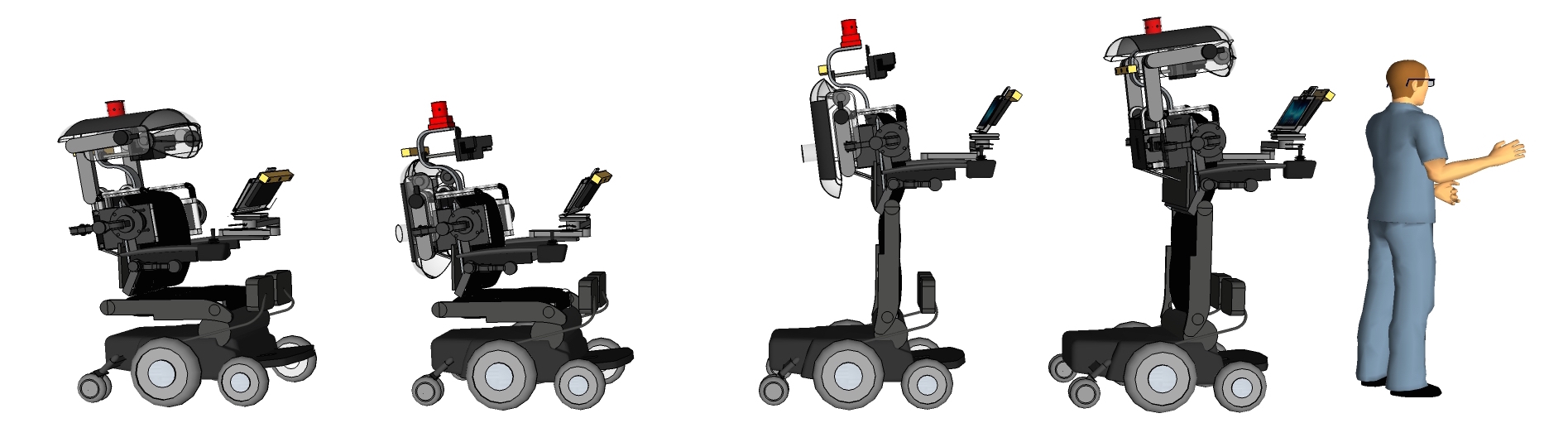 Figure 21
Figure 21 Figure 22
Figure 22| Keywords | Google Scholar | IEEE Xplore |
|---|---|---|
| Powered wheelchair | 17500 | 487 |
| Electric wheelchair | 16900 | 367 |
| “Powered wheelchair” | 4450 | 140 |
| “Electric wheelchair” | 5,260 | 160 |
| “Intelligent wheelchair” | 2480 | 131 |
| “Autonomous wheelchair” | 952 | 35 |
| “Robotic wheelchair” | 2300 | 131 |
| “Human factors” + “wheelchair” | 715 | 1 |
| Subcategory | Count | |
| Past | ||
| Haptic feedback | 3 | |
| Voice recognition | 5 | |
| Object recognition | 3 | |
| Human physiology | 4 | |
| Collision avoidance | 8 | |
| Social issues | 12 | |
| Present | ||
| Cloud computing | 3 | |
| Computer vision | 8 | |
| Game controller | 3 | |
| Touch screens | 5 | |
| Following | 10 | |
| Machine learning | 19 | |
| Mapping | 3 | |
| Navigational assistance | 25 | |
| Human learning | 9 | |
| Operations | 11 | |
| Future | ||
| Biometrics | 3 | |
| Brain Computer Interface | 11 | |
| Multi-modal input methods | 3 | |
| Localization | 2 | |
| Human Robot Interaction | 5 | |
| Total | 155 |
| Description | Location | Year |
|---|---|---|
| US Naval Academy [33] | Maryland, USA | 2005 |
| Lehigh University [34] | Pennsylvania, USA | 2007 |
| University of Pittsburgh [35] | Pennsylvania, USA | 2007 |
| Imperial College [36, 37] | London, UK | 2008 |
| Doshisha University [38] | Kyoto, Japan | 2009 |
| University of Bremen [39] | Bremen, Germany | 2009 |
| University of Paris 8 [40] | Paris, France | 2009 |
| Chuo University [41] | Tokyo, Japan | 2011 |
| Toyohashi U.of Technology [42] | Tokyo, Japan | 2011 |
| McGill University [11] | Montreal, Canada | 2011 |
| University of BC [43, 44] | Vancouver, Canada | 2011 |
| University of Aveiro [45] | Portugal | 2011 |
| Universidad Carlos III [46] | Madrid, Spain | 2011 |
| KU Leuven [47] | Heverlee, Belgium | 2012 |
| University of Canterbury [48] | Christchurch, NZ | 2012 |
| U. of Apl. Sci. W. Switzerland [49] | Fribourg, Switzerland | 2012 |
| University of Sydney [50] | Sydney, Australia | 2012 |
| Case Western Reserve [51] | Ohio, USA | 2013 |
| Hefestos [52] | Sao Leopoldo, Brazil | 2013 |
| Indian Institute of Technology [53] | Jodhpur, India | 2013 |
| Institute of Engg. & Technology [54] | Ghaziabad, India | 2013 |
| ATRII [55] | Kansai, Japan | 2013 |
| Chonnam National University [56] | Gwangju, S. Korea | 2013 |
| King Abdulaziz University [57] | Jeddah, Saudi Arabia | 2013 |
| U. of Alabama, Huntsville [58] | Alabama, USA | 2013 |
| U. of Texas, Arlington [59] | Texas, USA | 2013 |
| B.M.S College of Engineering [60] | Bangalore, India | 2014 |
| Kumamoto University [61] | Kumamoto, Japan | 2014 |
| Saitama University [62] | Saitama, Japan | 2014 |
| LURCH [63] | Chennai, India | 2014 |
| Integral Rehabilitation Center [64] | Orizaba, Mexico | 2014 |
| University of Kent [65] | Canterbury UK | 2014 |
| University of Lorraine [8] | Metz, France | 2014 |
| Uni. Politecnica delle Marche [66] | Ancona, Italy | 2014 |
| University Tun Hussein Onn [67] | Malaysia | 2014 |
| Northwestern University [68] | Illinois, USA | 2014 |
| UMBC [69] | Maryland, USA | 2014 |
| Smile Rehab [70] | Greenham, UK | 2015 |
| University of Nevada, Reno[26] | Nevada, USA | 2015 |
| Method | References |
|---|---|
| Biometrics | [71, 72, 73] |
| Brain computer interface (BCI) | [74, 75, 76, 77, 57, 78, 79, 80, 81, 82, 83, 63, 84] |
| Cloud | [40, 85, 56, 60] |
| Computer vision | [86, 87, 88, 89, 90, 91, 92, 93, 94, 95] |
| Game controller | [96, 97, 98] |
| Haptic feedback | [99, 100, 101, 47, 102] |
| Multimodal | [59, 103, 104, 105] |
| Touch | [52] |
| Voice | [11] |
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsGaze Tracking and Assistive Technology · Assistive Technology in Communication and Mobility · Digital Accessibility for Disabilities
A Comprehensive Review of Smart Wheelchairs: Past, Present and Future
Jesse Leaman, and Hung M. La, *Senior Member, IEEE * The authors are with the Advanced Robotics and Automation (ARA) Lab, Department of Computer Science and Engineering, University of Nevada, Reno, NV 89557, USA. Corresponding author: Hung La, email: [email protected]
Abstract
A smart wheelchair (SW) is a power wheelchair (PW) to which computers, sensors, and assistive technology are attached. In the past decade, there has been little effort to provide a systematic review of SW research. This paper aims to provide a complete state-of-the-art overview of SW research trends. We expect that the information gathered in this study will enhance awareness of the status of contemporary PW as well as SW technology, and increase the functional mobility of people who use PWs. We systematically present the international SW research effort, starting with an introduction to power wheelchairs and the communities they serve. Then we discuss in detail the SW and associated technological innovations with an emphasis on the most researched areas, generating the most interest for future research and development. We conclude with our vision for the future of SW research and how to best serve people with all types of disabilities.
Index Terms:
Smart Wheelchair, Intelligent Wheelchair, Autonomous Wheelchair, Robotic Wheelchair, Human Factors.
I Introduction and Review Methodology
People with cognitive/motor/sensory impairment, whether it is due to disability or disease, rely on power wheelchairs (PW) for their mobility needs. Since some people with disabilities cannot use a traditional joystick to navigate their PW they use alternative control systems like head joysticks, chin joysticks, sip-n-puff, and thought control [1, 2, 3, 4, 5]. In many cases PW users have difficulties with daily maneuvering tasks and would benefit from an automated navigation system. Mobility aside, people with disabilities are heavily reliant on their caregivers for eating and drinking, handling items, and communicating with others, especially in large groups.
To accommodate the population of individuals who find it difficult or impossible to operate a PW, several researchers have used technologies originally developed for mobile robots to create smart wheelchairs [6, 7, 4, 8, 9]. A smart wheelchair (SW) typically consists of either a standard PW base to which a computer and a collection of sensors have been added, or a mobile robot base to which a seat has been attached [10]. Pineau et al. 2011 argue that the transition to wheelchairs that cooperate with the user is at least as important as that from manual to powered wheelchairs, possibly even more important since this would mark a paradigmatic rather than merely a technological shift [11].
Overall, there has been a huge effort in research and development (R&D) on both PWs and SWs in particularly, and assistive technology in general for people with disabilities. There have been many reported R&D successes, like innovative autonomous SWs [12, 13, 14]. However, in the past decade since the work by Simpson [15] and Ding et al. in 2005 [16], there has been little effort to extensively and intensively review, and more importantly provide a complete state-of-the-art overview of the research trends for SWs. To fill this gap, in this paper we aim to provide the readers and researchers a systematic and comprehensive review of the international SW research efforts since the major review works by Simpson and Ding in 2005 [15, 16].
To that end we conducted a literature search in major electronic databases including, IEEE Xplore, Google Scholar and PubMed. The articles were included in this systematic review when they met the following criteria: (i) they were written in English; (ii) they were published from 2005 to 2015; and (iii) the conference proceedings were also examined only if they were substantially different from journal articles presented by the same authors. Titles and abstracts were first screened, and then the full text copies of all studies were examined to determine whether they met the pre-specified inclusion criteria. The essential component of our search keyword should be “wheelchair” then we add more supplemental words to form our keywords. We started with powered wheelchair and electric wheelchair keywords to acquire an overall result. Since the search produced a significantly large number of results, we refined the keywords by grouping or adding more specific keywords such as “powered wheelchair”, “electric wheelchair”, “intelligent wheelchair”, “autonomous wheelchair”, “robotic wheelchair”, and [“human factors” + “wheelchair”] to narrow down the search area and increase the chance of getting relevant hits. We also create several combinations using those keywords to enhance our search. Table I illustrates the search results when using a set of keywords on different popular databases. At the end, the search revealed 155 references that described achievements in SW research, which we present in the chronology shown in Table II.
We review the concepts and showcase the latest human-computer interface hardware, sensor processing algorithms, and machine-vision innovations made in recent years. These tools give people with disabilities not only mobility but also the necessary help and support to handle daily living activities. We hope that the information gathered in this study will enhance awareness of the status of contemporary SW technology, and ultimately increase the functional mobility and productivity of people who use PWs.
The rest of this paper is organized as follows: next we present past achievements in PW development (Sec. II), followed by a description of the international SW research effort and an overview of the main topics of interest (Sec. III). Then we showcase the particular research in the areas of input methods (Sec. IV), operating modes (Sec. V), and human factors (Sec. VI). Finally, we lay out our vision of the future of SW research and development (Sec. VII), and conclude with a discussion of changes since the last review (Sec. VIII).
II Past: The Power Wheelchair
George Klein invented the first PW for people with quadriplegia injured in world war II while he was working as a mechanical engineer for the National Research Council of Canada [22]. A person with that level of disability is by default bedridden because without assistance from people and/or technology there would be no way to get up. That being said, with the right combination of human and technological resources, a person with quadriplegia can still have an extremely rich life and make a major contribution to society, a philosophy we hope to share with people who have just experienced the onset of disability.
While primarily intended for people with mobility disabilities, those suffering from ailments resulting in fatigue, and pain can also benefit from a PW. By 1956 Everest & Jennings and the American Wheelchair Company began producing PWs for mass sales [23]. The basic components of a PW are:
- •
Chassis, or drive system, may be front-wheel, rear-wheel, center-wheel, or all-wheel-drive. Chassis may be foldable [24], include stairclimbing ability (Fig. 1a), have standing ability (Fig. 1b), have all-terrain tank tracks (Fig. 1c), or 4-wheel all-terrain drive (Fig. 1d, 1e).
- •
Batteries: The first PWs derived their power from 2- 24V wet cell batteries. But these batteries have to be removed from the wheelchair during travel on airplanes. They were eventually replaced by dry cell batteries.
- •
Controller is the interface between human and machine. Commercially available controllers include: hand joystick, sip-n-puff, chin joystick, and head joystick.
- •
Seating system: Seats, are typically upgraded to include cushions that use foam, gel, or air to prevent pressure sores; Backrests, are typically padded with foam and can be motorized to tilt and recline; Lateral supports keep the user from tilting side-to-side; and Footrests, are either removable or motorized to accommodate a more comfortable reclining position.
Medicare prescription guidelines limit PWs to those individuals who cannot use a manual wheelchair. But many more people would benefit from a PW, and often resort to less expensive, generic solutions that often do not meet the needs of the individual and their particular disability.
Some people with quadriplegia end up making major modifications to their own wheelchairs in order to have additional safety measures, like lights or reflectors, rearview cameras, and assistive technology to use as an input method for computing.
Co-author, Dr. Jesse Leaman, began his quest to improve the PW user experience in 1998 while a summer intern at NASA’s Marshall Space Flight Center. By 2007, his invention, the information technology upgrade package for PWs, dubbed “Gryphon Shield”, was recognized as one of the the year’s top 25 inventions by the History Channel and the National Inventors Hall of Fame [25]. By 2010, however the system had grown too large, and heavy for the wheelchair base, and had become difficult to maintain. The upgrade of “Gryphon Shield” is the iChair presented in [26, 27] where we take advantage of a head tracking mouse [28] and a Mount-n-Mover [29].
Overall, past studies have successfully achieved initial technological advancements that aid PW users in their daily activities. Nevertheless, there is little assistive technology included in the wheelchair to make it “smart,” which is the goal of research on integrating “intelligent” technology on a PW, called “smart wheelchair”.
III Present: The Smart Wheelchair
This section presents current SW research achievements around the world revealing a major shift from PW to SW.
Fig. 1 shows several recent power wheelchair options that can be used as the platform for a SW. Some early SWs were mobile robots with a seat attached [30, 31], but most were based on heavily modified commercially available PWs to which computers and sensors are attached [15]. The majority of SWs that have been developed to date have been tightly integrated with the underlying PW, requiring significant modifications to function properly [10, 32]. Ideally the SW system should easily be removable from the underlying wheelchair so that the user can attach it to a different chair, which is especially important for children, who may go through several wheelchairs before they are all grown-up [11].
It is challenging to build an efficient SW that people with all types of disabilities feel comfortable using. The system should be mountable on any make of PW, easily removable for maintenance and travel. Table III lists institutions around the world that have produced a SW prototype since 2005, which illustrates that interest in the topic has grown in recent years. Sensor/software packages, like collision avoidance, have had widespread success in the automotive industry, becoming less expensive and more trusted than ever before. Based on our search results, we have divided present research into three main topics: (i) input methods; (ii) operating modes; and (iii) human factors.
IV Input methods
The best choice of input method(s) is not always obvious, but it is usually user specific. Table IV lists subtopics and example references in the field of SW input method research. Parikh et al. 2007 [106] describe the foundations for creating a simple methodology for extracting user profiles, which can be used to adequately select the best command mode for each user. The methodology is based on an interactive wizard with a set of simple tasks for the user, and a method for extracting and analyzing the user’s execution of those tasks. Figure 2 shows several popular input methods including touch (a), computer vision (b), accelerometer (c), and EEG (d).
Faria et al. 2014 [107] argue that despite many distinct SW projects around the world, the adaptation of their user interface to the patient is an often neglected research topic. They recommend developing new concepts using multimodal interfaces and wheelchair interfaces adapted to the user’s characteristics.
The thought-controlled intelligent machine (TIM [108]) successfully implemented both head-movement controller (HMC) and brain-computer interface (BCI). The commercially available electroencephalograph (EEG) Emotiv EPOC headset was evaluated by Carrino et al. in 2012 [49], and at that time could not be used successfully for self-paced applications too sensitive to error.
State-of-the-art BCI can even be used to monitor the user’s emotional state [57, 45], such that when the user is frustrated the control unit will stop the wheelchair and wait for a new command from the user. In the other case, the control unit will continue executing the previously selected command.
Deictic control enables the user to move with a series of indications on an interface displaying a view of the environment, bringing about automatic movement of the wheelchair [8]. Cloud-based mobile devices [56] have been proposed for direct control of the SW, for remote monitoring, and to help serve as an emergency warning system. Brazil’s Hefestos [52] has a user interface that communicates with the electric wheelchair firmware via integrated Android app. With it the user can control the wheelchairs’ operation from widgets on the touch screen of the user’s mobile device.
Many SWs fuse information from internal sensors (Odometer, IMU (Fig. 3a,b)) with multiple external sensors to locate obstacles, and provide accurate localization even when one or more of the sensors are operating with large uncertainty.
A promising method of obstacle detection is a combination of a low-tech, inexpensive optical USB camera and sophisticated machine vision software [15].
Others like Ding et al. [35] envision a personalized wheelchair navigation system based on a PDA equipped with wireless internet access and GPS that can provide adaptive navigation support to wheelchair users in any geographic environment. Modern smart phones come standard with sensors built in that can be used to supply data about a SW’s activities [85].
Using a stereoscopic camera and spherical vision system [50], 3D scanners like Microsoft’s Kinect (Fig. 3c), laser rangefinders (LRFs) [15] (Fig. 3d), and most recently the Structure 3D scanner, it has become possible to use point cloud data to detect hazards like holes, stairs, or obstacles [51] (Fig. 4). These sensors have until recently been relatively expensive, were large and would consume a lot of power. The Kinect was found to be an effective tool for target tracking, localization, mapping and navigation [110, 111, 112].
In general, numerous advanced input methods have been developed to serve a wide range of SW users. It would be better if users can control the SW without giving many commands. Therefore, SW research in the future should focus on minimizing the need for users to provide continuous input commands. SWs should include operating modes that can be trained from users’ daily activities to be able to self-operate in most situations.
V Operating modes
Operating modes range from autonomous to semi-autonomous depending on the abilities of the user and the task at hand. Table V lists subtopics and example references in the field of SW operating mode research. Users who lack the ability to plan or execute a path to a destination benefit most from an autonomous system, but only if they spend the majority of their time within the same controlled environment. If the user can effectively plan and execute a path to a destination it may be more beneficial to have a system that is confined to collision avoidance [113, 106]. Ideally the design should be based around each individual user’s abilities and desires, maximizing the amount of control they are given, while offering the user help, as and when it is required [36].
Among some of the SWs offering semi-autonomous navigation, users may take the additional step of selecting from distinct operating modes depending on the task [15]. Operating modes reported to date include:
V-A Machine learning
What makes a wheelchair smart is not just a collection of hardware, but specialized computer algorithms that provide the artificial intelligence needed to make split-second decisions about where the wheelchair is heading, and what might be in its way.
Some examples of machine learning in SWs include the use of neural networks to detect obstacles [50], and reproduce pretaught routes [124]; some use obstacle density histograms to combine information from sonar sensors, and joystick input from the user [113]; while others use rulebased approaches. The LIASD SW has a control architecture that uses the virtual impedance principal [114]. This approach ensures a smooth implementation of desired tasks by taking into account some real impedance parameter properties such as inertia, viscosity and stiffness. Tyagi et al. 2013 [54] use fuzzy control, which allows the use of inexpensive and imprecise sensors, keeping the overall system cost and complexity low.
Most SWs use reactive control methods, like subsumptive architectures, as the lowest layer of a multilayer architecture [15]. This layer interacts directly with the underlying hardware, while upper layers provide deliberative reasoning and control. Tang et al. 2012 [48] introduce a system that makes extensive use of freely available opensource software. The Player Project has as the base framework: GMapping for mapping, Vector Field Histograms for obstacle avoidance, and Wavefront for path planning.
V-B Following
Several SWs [38, 115, 117, 61] have been developed that can follow alongside a companion. The SW can track the companion’s body position/orientation using laser range sensors based on Kalman filter and data association estimate the guide’s footprint. Based on position data of the footprint, a cubic spline generates a target path for the wheelchair. The wheelchair is controlled so that it can move along the guide footprint at a constant gap between the wheelchair and the guide.
In another case, a new methodology was developed [116] that allows a wheelchair, which does not have a prior knowledge of the companion’s destination, to move with companions collaboratively using a destination estimation model based on observations of human’s daily behaviors.
To serve a large group of people with disabilities at the same time, multi-wheelchair formation controls were developed to enable easy communication with companions [125]. Controlling the wheelchairs while maintaining formation is done by plotting a path defined by the model trajectory, and then calculating a path for each wheelchair () a small distance from [126, 60, 127].
V-C Localization and mapping
A major challenge is the development of a robust, reliable localization and navigation system in both indoor and outdoor environments. Since the SW needs to safely navigate on roads/sidewalks, it is required that the localization accuracy be within a range of a few centimeters. The main challenge for outdoor localization is that the global positioning systems (GPS) are not always reliable and robust, especially in tree covered environments. The GPS measurements are integrated with attitude information from the onboard inertial measurement unit (IMU) to enhance the localization accuracy. Moreover, the developed navigation system also fuses the GPS/IMU measurements with the wheel odometry information through an extended Kalman filter (EKF) design [128, 129]. Utilizing the odometry-enhanced fusion, the SW will achieve high-accuracy localization even in GPS-denied environments [130, 131, 132].
Fig. 4 shows an example of obstacle detection using Microsoft’s Kinect [51]. An RGB image of a floor with an obstacle and a few bumps is shown side-by-side with a point cloud map of the same floor. Obstacles are red, flat safe terrain is light blue, and bumps are shades of orange and yellow.
3D point cloud data can also be displayed as a 2D birds eye view of the SW’s environment [50] (Fig. 5). From left to right the time sequence (T1-T5) illustrates the SW advancing into a previously uncharted room, continuously building a map, and keeping a record of obstacles for later reference when they are out of range of vision. Between frames 1 and 2 the pilot turns side to side to collect data.
Using spherical vision cameras like the BGR Ladybug2 [134] and applying methods like the improved Prewitt edge detection [121], SWs can detect obstacles in most indoor environments [50] (Fig. 6).
V-D Navigational assistance
An elegant application of semi autonomous obstacle avoidance was accomplished by Rofer et al. 2009 [122] for a rear-wheel drive SW, where the front active castor wheels are always rotated by motors to match the orientation of the current driving direction.
Viswanathan et al 2011. [43] run multiple processes in a distributed fashion on a Nimble Rocket TM that serve people with visual impairments particularly well.
- •
Collision Detector: detects frontal collisions and stops the wheelchair if an object is detected within a distance of approximately 1 meter, preventing motion in the direction of the obstacle through the controller.
- •
Path Planner: given a global map of the environment and an initial position estimate, visual odometry produce the optimal route to the specified goal location. The trajectory is analyzed to determine deviations from the optimal route as well as upcoming turns.
- •
Prompter: uses a Partially Observable Markov Decision Process (POMDP) to determine the optimal prompting strategy. Specifically, this module estimates the users’ ability level to navigate to the goal independently based on past errors, and responsiveness to prompts in order to select appropriate audio prompts to assist the users in navigation.
Jain et al. 2014 [68] present an algorithm for the automated detection of safe docking locations at rectangular and circular docking structures (tables, desks) with proper alignment information using 3D point cloud data. Based on geometric information, computed from depth data, the method is invariant to scene or lighting changes. It does not make use of fiducial landmarks, or simplify the problem by using customized docking structures [123]. The safe docking locations can then be provided as goals to an autonomous path planner.
The same docking principals also apply to the joining of a SW with a transport vehicle like a van or bus. Gao et al. 2007 [34] devised a LIDAR based Automated Transport and Retrieval System (ATRS) as an alternative to van conversions for automobile drivers.
Poorten et al. 2012 introduces a set of novel haptic guidance algorithms intended to provide intuitive and reliable assistance for PW navigation through narrow or crowded spaces. Tomari et al. 2014 [67] propose a method of navigation in crowded indoor environments based on the observation of people’s head information obtained from color and range images. Initially head regions in the color image are tracked and their orientations are estimated, then the head orientation data are integrated with the head position data in the range image to determine the wheelchair motion so that it can smoothly move among humans.
In each operating mode, a huge number of achievements have been made to improve the SW’s functionality. Due to current sensor capabilities limiting autonomous navigation to indoor environments, combining all of the above advancements can result in autonomous navigation through all environments. Thus, autonomous navigation would be one of the main focuses of future SW research. Furthermore, some SW users still significantly depend on caregivers, especially people with quadriplegia. While robotic technology will not completely replace human caregivers, it can help to extend the time that an individual can spend in independent living situations [135].
VI Human Factors in Smart Wheelchair
As the population of industrialized countries ages, the number of adults living with mobility impairment is increasing, with an estimated 2.8 million Americans residing outside of institutions utilize wheelchairs as an assistive technology device [136]. This population includes, but is not limited to, individuals with low vision, visual field neglect, spasticity, tremors, or cognitive deficits. Challenges to safe, independent wheelchair use can result from various overlapping physical, perceptual, or cognitive symptoms of diagnoses such as spinal cord injury, cerebrovascular accident, multiple sclerosis, amyotrophic lateral sclerosis, and cerebral palsy. Persons with different symptom combinations can benefit from different types of assistance from a SW and different wheelchair form factors [137, 69, 138]. Manual and powered wheelchairs are standard approaches to address such impairments, but these technologies are unsuitable for many users [139]. While the needs of some individuals with disabilities can be satisfied with PWs, many people with disabilities (about 40% of the disabled community [140]) find operating a standard PW difficult or impossible (Fig. 7).
In the past SWs have simply been considered mobile robots that are transformed “by adding a seat”. The main difference between a SW and a robot with a seat is that a wheelchair is an extension of the human being sitting in it and he or she must feel comfortable using it. Thus, human factors are a crucial component in the design and development of a SW [141, 142, 143, 144]. Table VI lists subtopics and example references in the field of SW human factor research.
VI-A Human Robot Interaction
A recent meta-analysis of the available literature on trust and human-robot interaction (HRI) found that robot performance and attributes were the largest contributors to the development of trust in HRI. Environmental factors played only a moderate role [145].
In a discussion on the unique technical, ethical, and legal challenges facing HRI practitioners when designing robots for human social environments, Riek et al. 2014 argue that the affordance of all rights and protections ordinarily assumed in human-human interactions apply to human-robot interaction, and propose a code of ethics for the profession [146].
Robots intended to provide physical assistance to people with disabilities present a unique set of ethical challenges to HRI practitioners. Robots may be used for daily living tasks, such as bathing, manipulation, mobility and other activities to support independent living and aging-in-place. The design of physically assistive robots must, therefore, take into consideration the privacy rights of clients, as with, perhaps, the deactivation of video monitors during intimate procedures.
VI-B Learning
A team of 18 clinical researchers at the University of British Columbia have developed a program of research that will use a mixed-methods approach, including lab-based, qualitative and quantitative methodologies, spanning 5 key research projects. Their plan is to assess the effectiveness of their new, collaboratively-controlled wheelchair, in combination with the Wheelchair Skills Program [148].
Gironimo et al. 2013 at the University of Naples use virtual reality based experiments in which they collect quantitative measures of users operating a wheelchair-mounted robot manipulator, followed by subjective user evaluations intended to maximize the effectiveness, the efficiency, and the satisfaction of users [149].
Even if stable and safe wheelchair robots are realized, integrating them in the world is difficult without acceptance by the actual users: elderly people. Experimental results with elderly participants at a pseudo resident home show that the seniors prefer wheelchair robots programed to make appropriate utterances to reduce their anxieties. Seniors also preferred an adaptable wheeling speed, since speed preference varies for each individual [154].
VI-C Physiology
PW users are involved in some accidents once in a while. Most common are falls off of the wheelchair due to inclined surfaces (Fig. 7-a,b), so researchers at the Kyoto Institute of Technology measure the physiological indices when the wheelchair is inclined, in order to evaluate the physical strains on the human body [152]. Their results show that even though the contact area does not get higher as the incline angle gets higher, the distribution of high pressure area gets lower as the angle gets higher, therefore people feel uncomfortable as the inclination gets higher.
Older adults typically receive little or no mobility training when they receive a wheelchair, and are therefore more likely to experience an accident. In order to accommodate this underserved population Giesbrecht et al. 2014 [153] developed a therapist-monitored wheelchair skills home training program delivered via a computer tablet. To optimize efficacy and adherence, principles of self-efficacy and adult learning theory were foundational in the program design.
A study with 23 participants by Meike Jipp of the German Aerospace Center in 2012 found that participants with lower fine motor abilities had more collisions and required more time for reaching goals. Adapting the wheelchair’s level of automation to these fine motor abilities can improve indoor safety and efficiency [151].
VI-D Social issues
A 2014 study of data in the form of 55 letters from 33 Danish citizens applying for assistive technology established the following as core aspects of user perspectives on assistive devices: quality of life, realization of personal goals, keeping up roles, positive self image, personal dignity, independence, activities and participation, self-care and security, lack of access in surroundings, professional domination of assistive device area, cultural stigma of negative symbolic value, and cumbersome standardized devices [155].
The program identifies several factors that will impede participation in public activities by a person with a mobility impairment.
- •
Individual: compromised body function and structure related to pain, strength, and endurance.
- •
Built environment: inaccessible locations, and challenging terrain.
- •
Social environment: social attitudes and level of personal assistance.
- •
Assistive technology devices including wheelchairs that are low-quality and inappropriate or do not fit the user.
- •
Contextual factors: age and confidence (self-efficacy) with wheelchair use.
VI-E Commercialization
There are three reasons to purchase a SW, each requiring a different behavior:
Mobility aid, helps the user reach a destination as quickly and comfortably as possible. 2. 2.
Training tool, helps the user develop specific skills. The amount of user input required is a function of the training activity. 3. 3.
Evaluation instrument, records activity without intervention.
Smile Rehab’s SW is the only SW available to the consumer (see Table VII), because the technology is still expensive, and sensor capabilities limit autonomous navigation to indoor environments, that have to be modified by putting down tape. Another downside is that the consumer has to use Smile Rehab’s PW platform.
Henderson et al. 2014 [65] are providing researchers with an embedded system that is fully compatible, and communicates seamlessly with current manufacturer’s wheelchair systems. Their system is not commercially available, but researchers can mount various inertial and environmental sensors, and run guidance and navigation algorithms which can modify the human desired joystick trajectory, to help users avoid obstacles, and move from room to room. SWs should be customized to each consumer, making it really difficult to expand a business or lower the cost of a SW (by mass production).
Toyota Motor East Japan Inc. [21], a manufacturing subsidiary of Toyota Motor Corporation, has gotten into the personal electric vehicle (PEV) business (Fig. 1e), which demonstrates that there is a market for technology very similar the ideal SW, a PEV modified for use indoors by an individual with a disability.
In general, apart from current technological issues, non-technical barriers also hamper commercialization. Prescribers and insurance providers want to avoid liability, and want proof that the SW technology works. A SW may be tested a thousand times without a user, under laboratory conditions, but it is more difficult to find a real human subject to participate in the trials. With very few trial participants, data has been difficult to collect, and insurers reluctant to provide reimbursement. Meanwhile, policymakers are concerned about the increasing demand for unnecessarily elaborate wheelchairs [159], and since SW studies are considered human trials, they are subject to strict government regulations [160].
VII Future: Co-robot
A study conducted by Worcester Polytechnic Institute (WPI) [135] showed that users who are accustomed to their wheelchairs have little to no tolerance for the failures of “new features,” which means full autonomy plays an important role in users’ acceptability. Overall, people are open to using a robot that assists them in performing a task in an environment with other humans. These ”Co-robots” provide their user with independent mobility. SWs have to be safe and their operations must be reliable under any conceivable circumstance. This is especially true for SWs, where the user has a disability and may be quite frail. To emphasize these trends, we propose and discuss the following future directions which would be the priorities for SW research.
VII-A Autonomous Navigation
Current PW users still have many difficulties with daily maneuvering tasks (Fig. 7), and would benefit from an automated navigation system. Future SW users will be able to select from several autonomous or semi-autonomous operating modes, using the input methods they are most comfortable with. They will direct their SW to navigate along preprogrammed routes with little physical or cognitive effort indoors and out, passing through doors and up-and-down elevators. The SW will communicate with the user when it is appropriate in order to reduce anxiety, and build an individualized profile. These profiles will track such variables as preferred input method, wheeling speed, turning speed, and amount of verbal feedback, just to name a few.
One of the downsides of the earlier work in SWs and autonomous driving [10, 161, 32, 11, 115, 162, 116, 117, 6, 163, 4] has been that the environment had to be permanently modified in order for the wheelchair to navigate independently. Future research plans should focus on developing novel navigation algorithms to allow SWs to autonomously and safely navigate in complex environments. These are not trivial tasks since they require online calibration [164, 165] and sensor fusion of multiple sensor sources including laser scanners, camera, IMU, encoder and GPS, etc. Fortunately, the navigation algorithms developed for SWs could inherit the advanced performances of previous works on autonomous navigation for the robots [130, 131] and or autonomous cars.
VII-B *Human-Smart Wheelchair Interaction Model *
The human-SW interaction model plays a vital role in the formation of a SW. The reinforcement learning technique [166, 167] could be utilized to build an efficient interaction model between user and SW. The developed model may take into account sensor feedbacks, such as from Emotive sensors [168] and various environment sensing sensors including Oculus virtual reality sensors, laser scanners, cameras and global positioning system (GPS). The SW uses these control signals to navigate and operate its robotic arms (see Fig. 8). Human user thinking will be captured and analyzed through an advanced signal processing model [4]. The output signals will control the operations of the SW including wheel motors as well as robotic arms. A shared control scheme could be developed to allow effective collaboration between user and SW, as well as to adapt SW’s assistance to the variations in user performance and environmental changes.
A real-time Multi-Modal Perception (MMP) model should be used to deal with uncertainty in sensing, which is one of the most enduring challenges. The perceptual challenges are particularly complex, because of the need to perceive, understand, and react to human activity in real-time. The range of sensor inputs for human interaction is far larger than for most other robotic domains in use today. MMP inputs include human thought, speech and vision, etc., which are major open challenges for real-time data processing. Computer vision methods processing human-oriented data such as facial expression [169] and gestures recognition [170] will need to be developed to handle a vast range of possible inputs and situations. Additionally, language understanding and dialog systems between human users and SWs have to be investigated [171, 172]. MMP can obtain an understanding of the connection between visual and linguistic data [173, 60] and combine them to achieve improved sensing and expression with a SW.
VII-C Smart Wheelchair with Smart Home
SWs will be integrated into the smart home, providing a seamless user experience and control over all household appliances. When the users are outdoor a retractable roof will provide shelter from the elements, and additional safety at night while driving in traffic. Optical stereoscopic and spherical vision imagery will be combined with infrared laser data to produce a virtual point cloud matrix of the user’s surroundings. Objects in the matrix are identified using machine vision, visual tracking, and gesture recognition algorithms. Localization information from the IMU and GPS, onboard data collected, and bluetooth beacon data flooding public spaces, will all help guide the SW to a particular destination. Fig. 9 is a 3D rendering of a standing SW with a retractable roof and robotic arms that will allow users with disabilities of all types to independently perform many more daily living activities.
We believe that given liability concerns, SWs in the future should be treated like PEVs that are registered and insured. Users should be certified, or licensed, for operation after passing a standardized wheelchair skills test [11, 148].
VIII Conclusion
SWs represent a paradigm shift unlike the one that occurred when power wheelchairs became available on a mass scale, which was a technological advancement from the manual wheelchair. In the last decade sensors and computers have gotten faster, cheaper, and smaller, while computer vision software has become more sophisticated and readily available than ever before. The research community has developed many prototypes, the best parts of which should be fused into a modular upgradable system that can be marketed to the millions of people who need PWs. Electric vehicle manufacturers are in a prime position to produce a stand-alone SW, and capitalize on the millions of aging Babyboomers worldwide, who will want to have a SW.
The best SWs will be able to accommodate people with all disability types by utilizing a multi-modal interface that combines computer vision, touch, voice, and brain control. SWs will be able to build 3D maps using mobile scanners, and navigate autonomously by streaming and analyzing sensory data in real-time through cloud computing applications. These solutions show much promise to significantly improve the quality of life for people who use PWs, but only if they are trusted by the people they were designed to serve. This means that human factors have be taken into account, so SWs should be customizable to the individual user’s preferences, provide verbal feedback when appropriate, and be mountable on any PW. The stage is set for humans and robots to interact in public spaces in order to give people with disabilities the best quality of life possible, and the opportunity to maximize their human potential.
Acknowledgment
The authors would like to thank Nhan Pham for his help to proofread the paper and re-organize the references and search keywords.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] O. Mazumder, A.S. Kundu, R. Chattaraj, and S. Bhaumik. Holonomic wheelchair control using EMG signal and joystick interface. In Recent Adv. in Eng. and Comput. Sci. , pages 1–6, Chandigarh, India, Mar. 2014.
- 2[2] F. Pasteau, A. Krupa, and M. Babel. Vision-based assistance for wheelchair navigation along corridors. In IEEE Int. Conf. Robot. and Auto. , pages 4430–4435, Hong-Kong, Hong Kong SAR China, Jun. 2014.
- 3[3] R. Desmond, M. Dickerman, J. Fleming, D. Sinyukov, J. Schaufeld, and T. Padir. Develop. of modular sensors for semi-autonomous wheelchairs. In IEEE Int. Conf. Technol. for Practical Robot Applicat. , pages 1–6, Woburn, MA, Apr. 2013.
- 4[4] D. Sinyukov, R. Desmond, M. Dickerman, J. Fleming, J. Schaufeld, and T. Padir. Multi-modal control framework for a semi-autonomous wheelchair using modular sensor designs. Intell. Service Robot. , 7(3):145–155, Jul. 2014.
- 5[5] J. d. R. Millan. BMI: Lessons from tests with impaired users. In Int. Winter Workshop Brain-Comput. Interface , pages 1–1, Jeongsun-kun, Feb. 2014.
- 6[6] D.K. Rathore, P. Srivastava, S. Pandey, and S. Jaiswal. A novel multipurpose smart wheelchair. In IEEE Students’ Conf. Elect., Electron. and Comput. Sci. , pages 1–4, Bhopal, Mar. 2014.
- 7[7] U. Yayan, B. Akar, F. Inan, and A. Yazici. Develop. of indoor navigation software for intelligent wheelchair. In IEEE Int. Symp. Innovations in Intell. Syst. and Applicat. Proc. , pages 325–329, Alberobello, Jun. 2014.
- 8[8] F. Leishman, V. Monfort, O. Horn, and G. Bourhis. Driving assistance by deictic control for a smart wheelchair: The assessment issue. IEEE Trans. Human-Mach. Syst. , 44(1):66–77, Feb. 2014.