Nonlinear Unknown Input Observability: The General Analytic Solution
Agostino Martinelli

TL;DR
This paper presents a comprehensive analytical solution for nonlinear unknown input observability, enabling automatic checking of system observability even with unknown inputs through a systematic, tensor-based approach.
Contribution
It introduces a novel, general analytical solution and an algorithm for unknown input observability, extending previous work to more complex nonlinear systems.
Findings
The solution is expressed using new tensor fields invariant under a defined group.
An algorithm for automatic observability analysis is developed.
Application demonstrated in visual-inertial sensor fusion systems.
Abstract
Observability is a fundamental structural property of any dynamic system and describes the possibility of reconstructing the state that characterizes the system from observing its inputs and outputs. Despite the huge effort made to study this property, there is no general analytical criterion to automatically check the state observability when the dynamics are also driven by unknown inputs. Here, we introduce the general analytical solution of this fundamental problem, often called the unknown input observability problem. We provide the systematic procedure, based on automatic computation (differentiation and matrix rank determination), that allows us to automatically check the state observability even in the presence of unknown inputs. The fundamental step to obtain this solution is the introduction of the group of invariance of observability. We introduce the group of transformations…
Click any figure to enlarge with its caption.
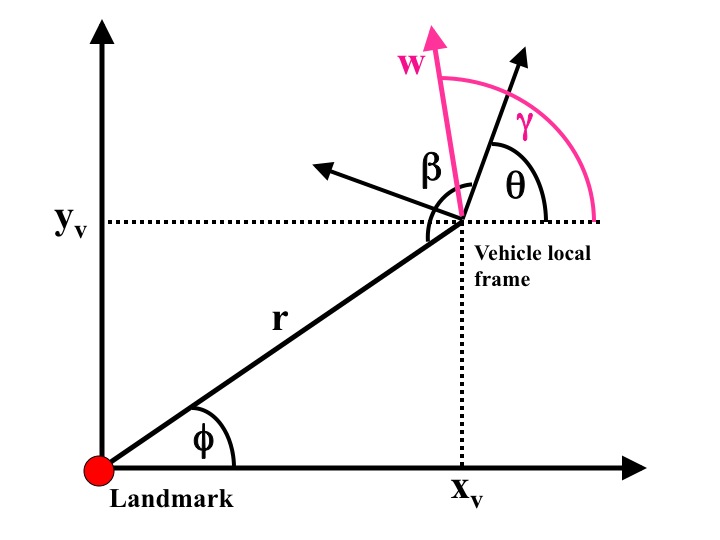 Figure 1
Figure 1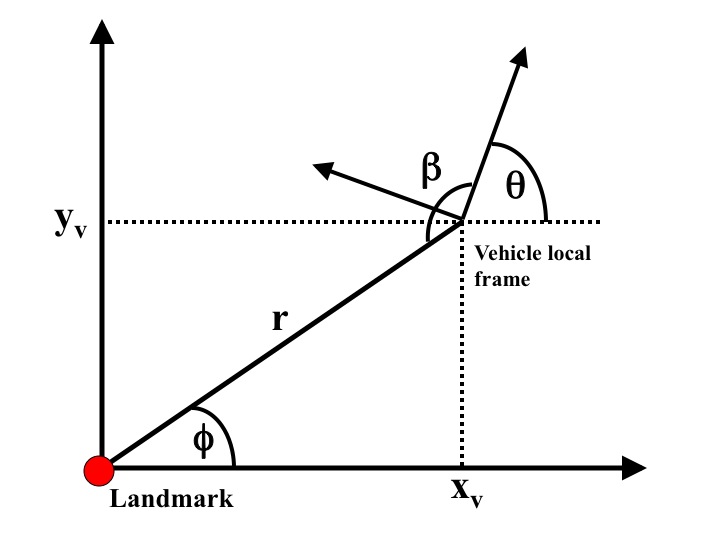 Figure 2
Figure 2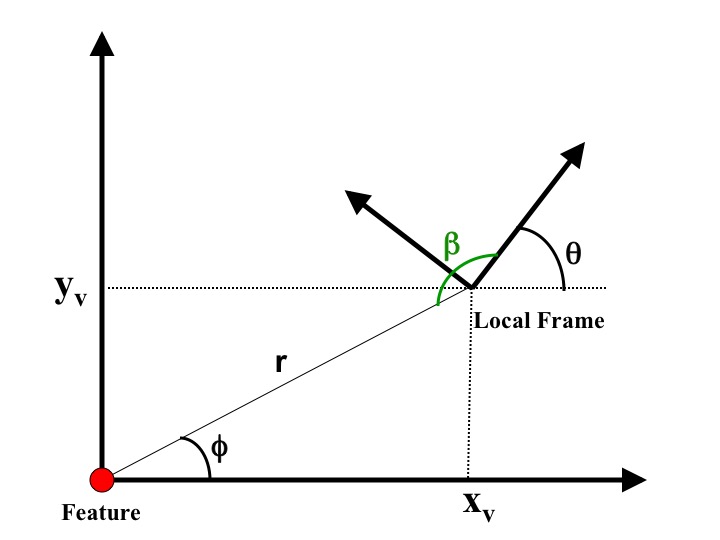 Figure 3
Figure 3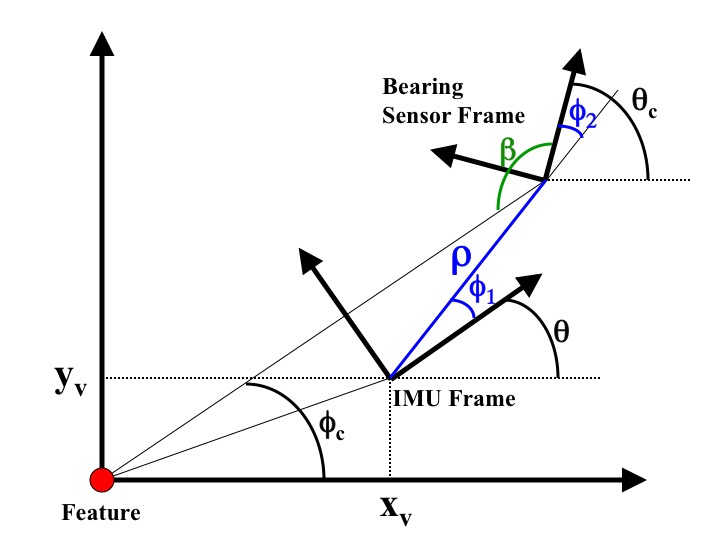 Figure 4
Figure 4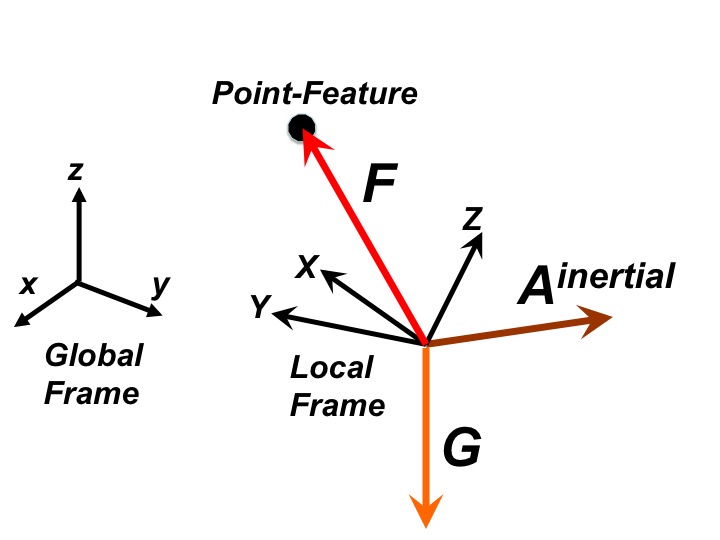 Figure 5
Figure 5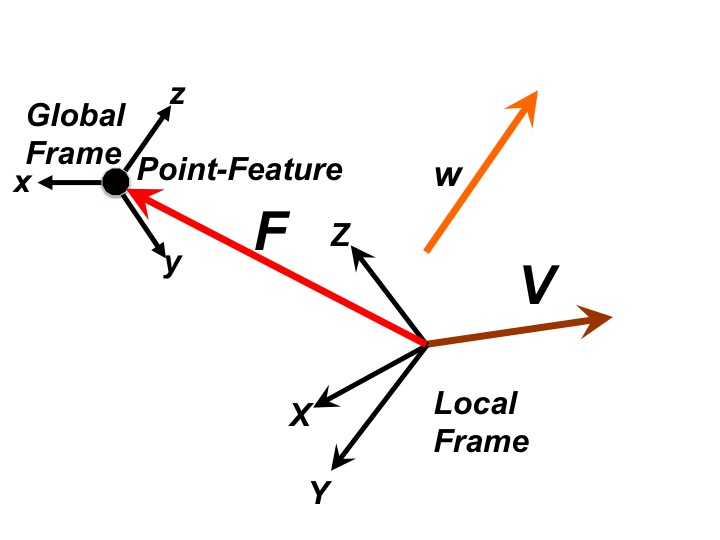 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.