Compile-Time Extensions to Hybrid ODEs
Yingfu Zeng (Rice University), Ferenc Bartha (Rice University), Walid, Taha (Halmstad University)

TL;DR
This paper introduces compile-time transformations that extend hybrid ODE formalism in reachability tools, enabling more expressive modeling of mechanical systems with derivatives and constraints, while ensuring soundness.
Contribution
It presents a novel compile-time approach to extend hybrid ODEs in reachability analysis tools, supporting derivatives and constraints with proven soundness.
Findings
Supports partial derivatives and equational constraints
Enables expression of Euler-Lagrangian equations
Ensures soundness of the extension
Abstract
Reachability analysis for hybrid systems is an active area of development and has resulted in many promising prototype tools. Most of these tools allow users to express hybrid system as automata with a set of ordinary differential equations (ODEs) associated with each state, as well as rules for transitions between states. Significant effort goes into developing and verifying and correctly implementing those tools. As such, it is desirable to expand the scope of applicability tools of such as far as possible. With this goal, we show how compile-time transformations can be used to extend the basic hybrid ODE formalism traditionally supported in hybrid reachability tools such as SpaceEx or Flow*. The extension supports certain types of partial derivatives and equational constraints. These extensions allow users to express, among other things, the Euler-Lagrangian equation, and to capture…
Click any figure to enlarge with its caption.
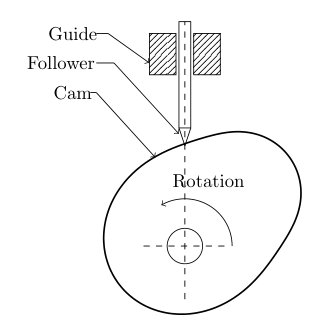 Figure 1
Figure 1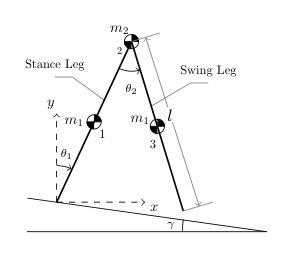 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4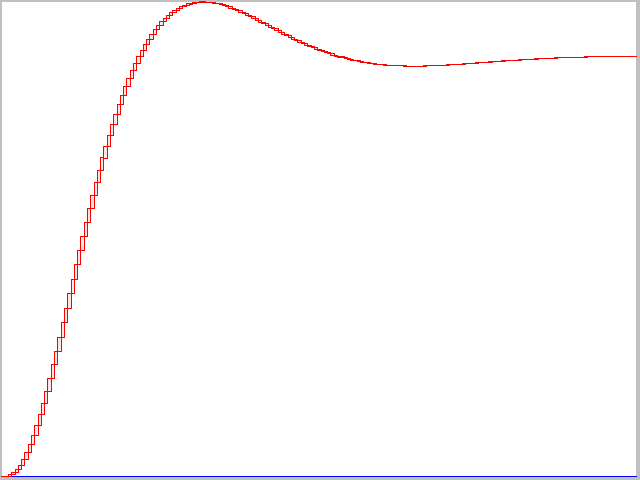 Figure 5
Figure 5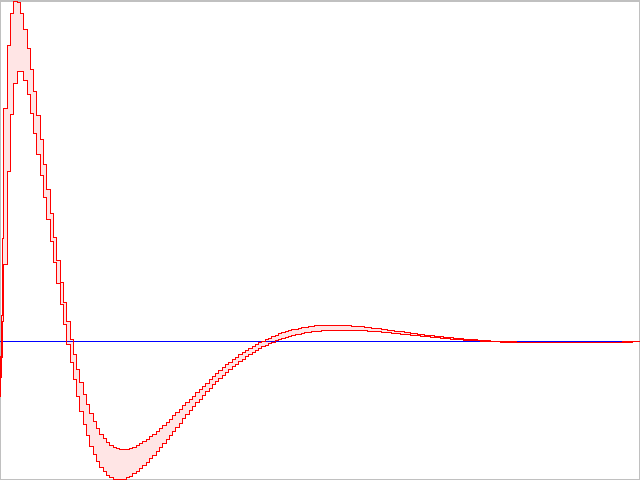 Figure 6
Figure 6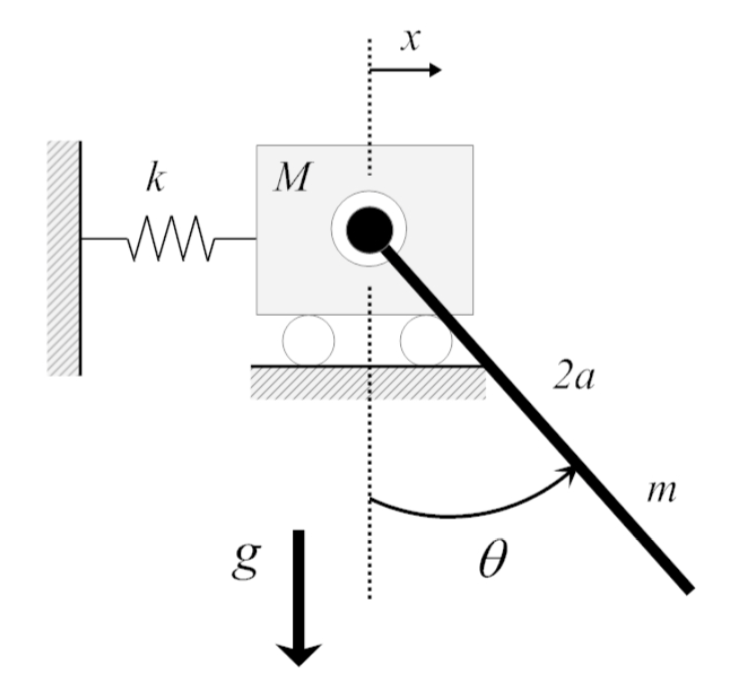 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.