Quantum and classical resources for unitary design of open-system evolutions
Francesco Ticozzi, Lorenza Viola

TL;DR
This paper develops a framework for implementing quantum channels through controlled unitary dynamics involving the environment, providing conditions for channel realization and connecting to existing protocols.
Contribution
It formalizes a controllability framework for open-system quantum dynamics and extends Stinespring's dilation, including classical randomization, to realize various quantum channels.
Findings
Conditions for realizing quantum channels based on environment state and dimension
Disproof of Lloyd's conjecture on environment size, with classical randomization as a resource
Recasting measurement-based protocols within a coherent control framework
Abstract
A variety of tasks in quantum control, ranging from purification and cooling, to quantum stabilization and open-system simulation, rely on the ability to implement a target quantum channel over a specified time interval within prescribed accuracy. This can be achieved by engineering a suitable unitary dynamics of the system of interest along with its environment -- which, depending on the available level of control, is fully or partly exploited as a coherent quantum controller. After formalizing a controllability framework for completely positive trace-preserving quantum dynamics, we provide sufficient conditions on the environment state and dimension that allow for the realization of relevant classes of quantum channels -- including extreme channels, stochastic unitaries, or simply any channel. The results hinge on generalizations of Stinespring's dilation via a subsystem principle. In…
Click any figure to enlarge with its caption.
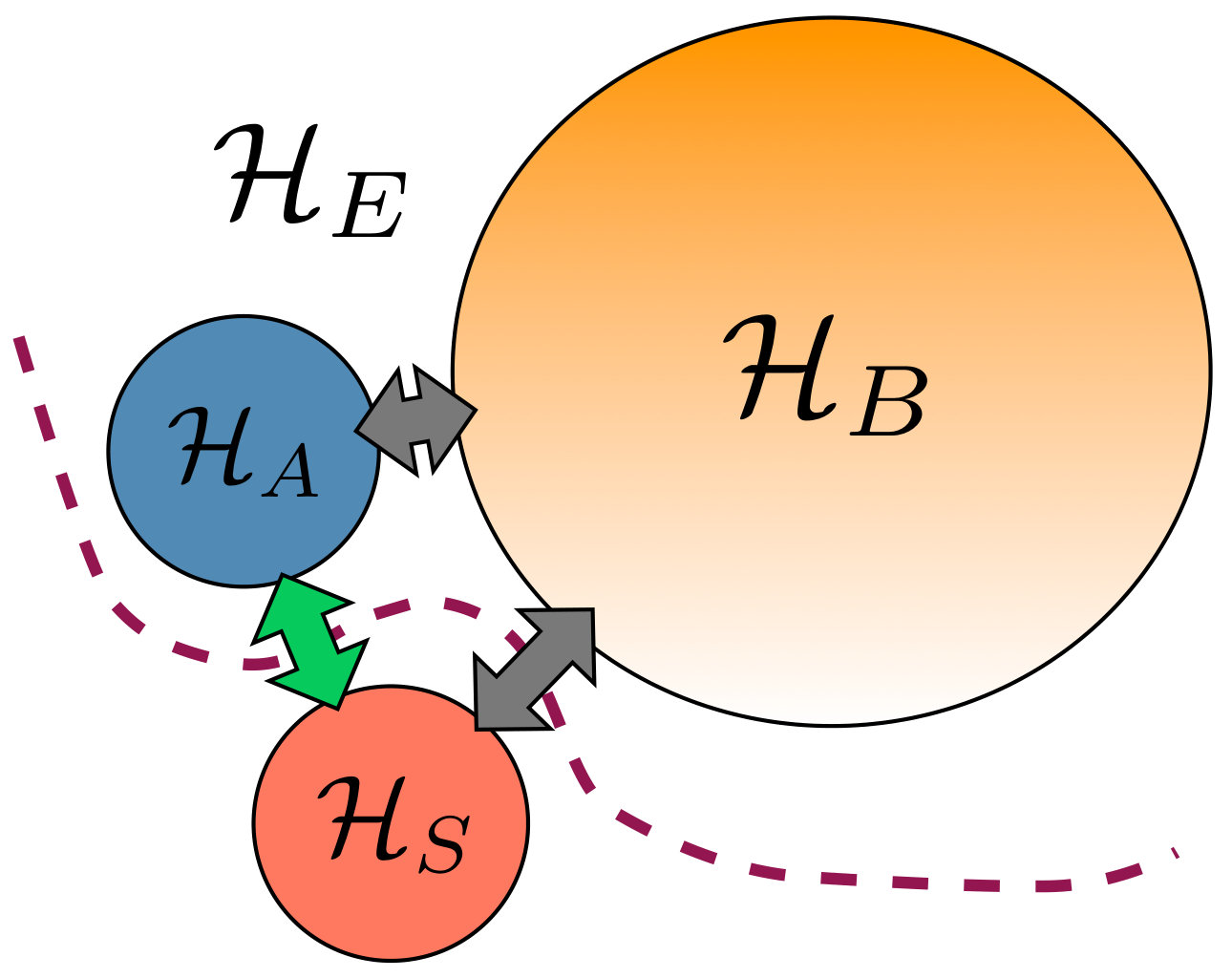 Figure 1
Figure 1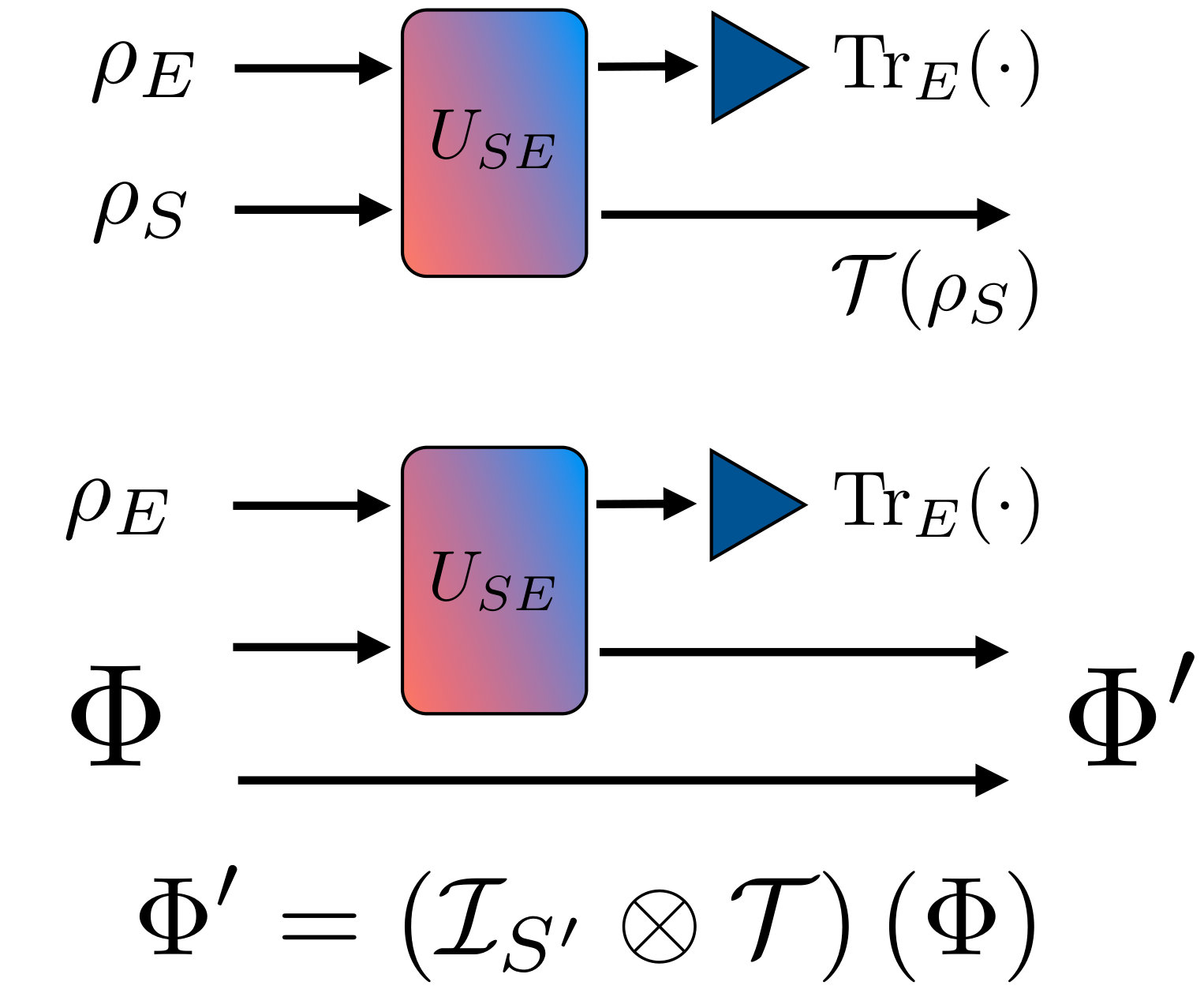 Figure 2
Figure 2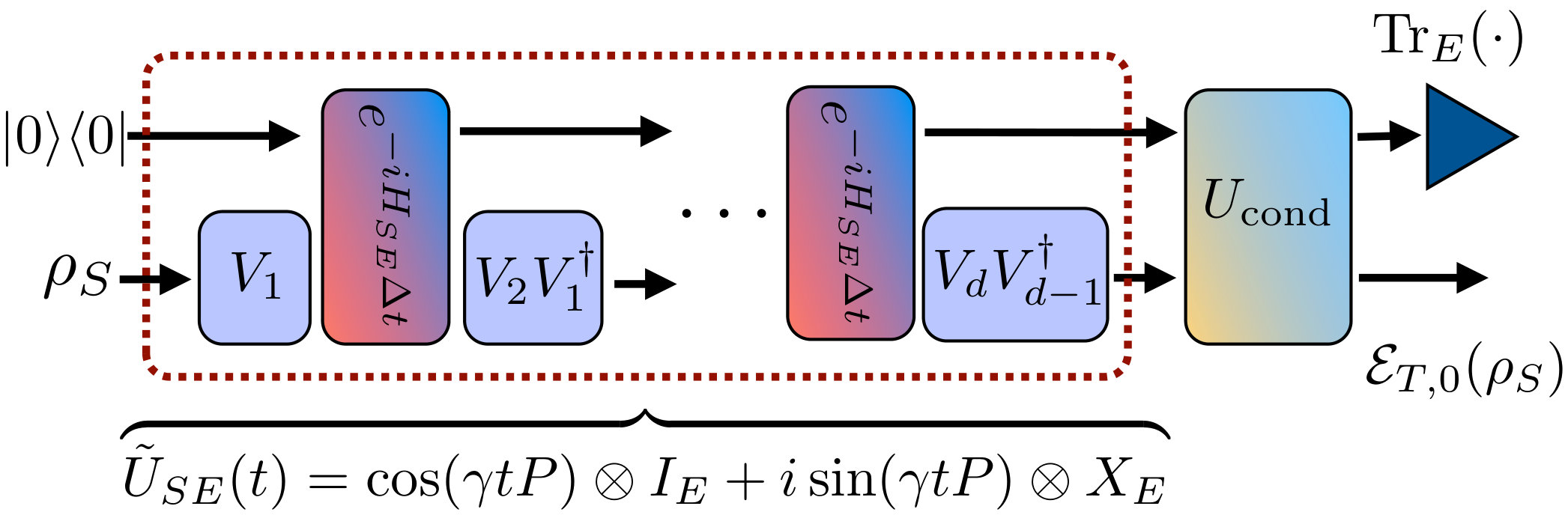 Figure 3
Figure 3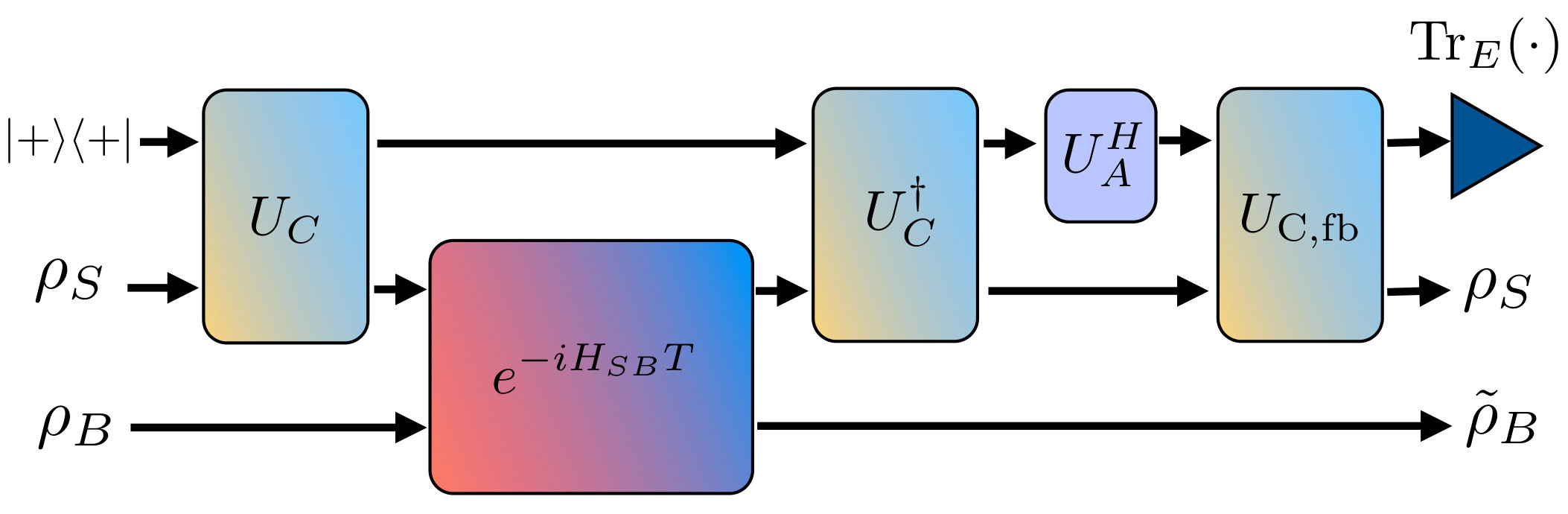 Figure 4
Figure 4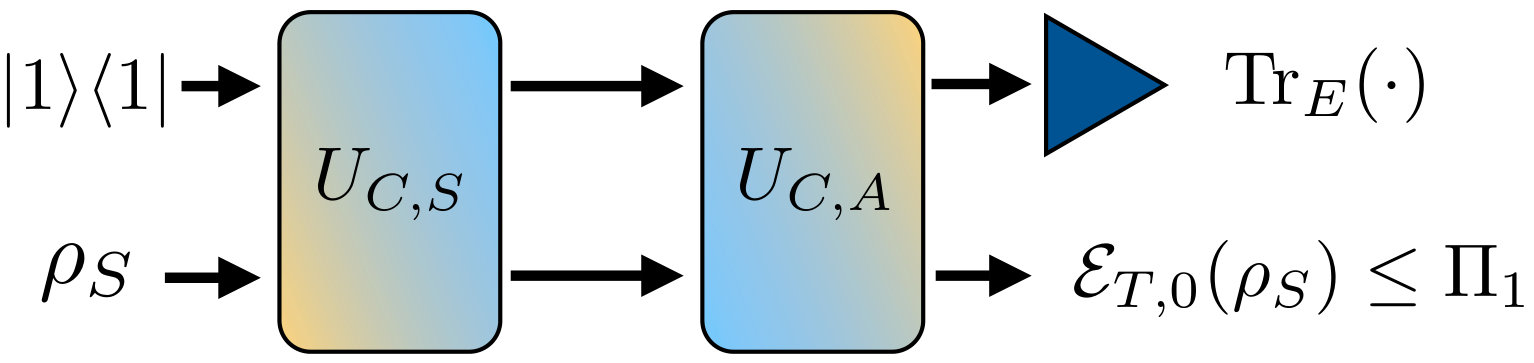 Figure 5
Figure 5Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Quantum and classical resources for unitary design of open-system evolutions
Francesco Ticozzi1,2, Lorenza Viola2
1 Dipartimento di Ingegneria dell’Informazione, Università di Padova,
via Gradenigo 6/B, 35131 Padova, Italy
2 Department of Physics and Astronomy, Dartmouth College,
6127 Wilder Laboratory, Hanover, NH 03755, USA
[email protected], [email protected]
Abstract
A variety of tasks in quantum control, ranging from purification and cooling, to quantum stabilization and open-system simulation, rely on the ability to implement a target quantum channel over a specified time interval within prescribed accuracy. This can be achieved by engineering a suitable unitary dynamics of the system of interest along with its environment – which, depending on the available level of control, is fully or partly exploited as a coherent quantum controller. After formalizing a controllability framework for completely positive trace-preserving quantum dynamics, we provide sufficient conditions on the environment state and dimension that allow for the realization of relevant classes of quantum channels – including extreme channels, stochastic unitaries, or simply any channel. The results hinge on generalizations of Stinespring’s dilation via a subsystem principle. In the process, we show that a conjecture by Lloyd on the minimal dimension of the environment required for arbitrary open-system simulation, albeit formally disproved, can in fact be salvaged – provided that classical randomization is included among the available resources. Existing measurement-based feedback protocols for universal simulation, dynamical decoupling, and dissipative state preparation are recast within the proposed coherent framework as concrete applications, and the resources they employ discussed in the light of the general results.
Keywords: Quantum control, quantum simulation, open quantum systems, channel controllability, coherent quantum feedback
1 Introduction
Realistic physical systems are never perfectly isolated from their surrounding environment – due to both unwanted couplings to uncontrolled degrees of freedom and to designer interactions with measurement apparatuses or auxiliary controller devices. In the statistical description of quantum systems, the resulting class of open-system dynamics may be derived directly from the quantum mechanics postulates [1]. More precisely, the state of the target system is associated to a trace-one, positive semidefinite density operator and, under the assumption that no initial correlations are present with the environment, its evolution over some specified time interval is described by a completely positive, trace-preserving (CPTP) linear map. Physically, the latter results from averaging over the degrees of freedom of the environment after a unitary evolution, driven by a joint Hamiltonian, has taken place. Beside their natural emergence in quantum statistical mechanics, open-system theory and thermodynamics [2, 3, 4], CPTP dynamics have gained a central role within quantum information science [5]. On the one hand, CPTP maps are the natural non-commutative analogues of classical stochastic maps; as such, they are being widely used to model quantum communication channels, noise effects, quantum error-correcting procedures, erasure and reset operations. In this context, they are typically called quantum channels, and we will use here the two denominations interchangeably. On the other hand, CPTP evolutions play a pervasive role also in quantum measurement theory and statistics – in particular, describing generalized non-selective measurements, conditional expectations and quantum filters [6, 7, 8], as well as feedback networks in quantum control theory [9, 10, 11].
In this work, we focus on the issue of quantifying the resources needed to engineer, exactly or within a finite accuracy, a desired CPTP map. Our interest in this problem stems from two major motivations. On a fundamental level, it is a key theoretical issue in the design of universal, digital open-system simulators [12, 13] – one of the premier applications of quantum information science, and one in which rapid experimental progress is being made [14, 15]. In addition, a variety of key tasks in quantum control can be described as, or can be brought to bear on, the effective engineering of a target set of CPTP maps: among these, we mention dynamical decoupling, quantum stabilization, purification and cooling – as we also investigated in previous work [16, 17, 18, 19].
It has long been known, thanks to a representation theorem by Stinespring [20], that any CPTP map can in principle be obtained via a unitary dilation. More concretely, this entails pairing the target system , say, of dimension to an auxiliary system , with dimension at most and prepared in a known pure state, and then implementing a joint unitary evolution on , whose net effect on is to enact the target map. However, while this provides a sufficient set of resources, characterizing what resources may also be necessary is not straightforward. In particular, it is not a priori clear what minimal dimension of is needed to implement any target map through such a unitary design, nor the extent to which access to a mixed initial state of may hinder the task. If one relaxes the problem to one of approximate engineering of a target map within a prescribed tolerance, even sufficient conditions are lacking to the best of our knowledge.
In addressing these issues, we introduce a general system-theoretic scenario for coherent control of open systems, and define a set of relevant CPTP controllability notions, associated, respectively, to the ability of engineering: (i) the full convex set of CPTP maps; or (ii) only the extreme ones; or (iii) all of those of fixed Kraus rank – either exactly or within prescribed non-zero accuracy (Section 2). We then proceed to derive a series of sufficient and/or necessary conditions for these controllability notions to hold (Sections 3 & 4). These results are obtained by generalizing Stinespring dilations, as well as previous results specifically regarding purification and cooling [21, 19]: in particular, we provide a sufficient condition on (possibly mixed) environment states that ensure unitary engineering of any maps of limited Kraus rank within a prescribed accuracy . This condition amounts to the existence of a sufficiently, -pure state in a virtual-subsystem decomposition of the environment, stemming from the “subsystem principle” established for purifying quantum maps in Ref. [19]. Next, we show that the same conditions are also necessary for unitary design of the set of extreme maps. However, the existence of an approximately pure quantum subsystem turns out not to be necessary in general for engineering specific target CPTP maps – as we explicitly demonstrate for stochastic unitaries via a construction based on majorization (Section 4.1). While the controllability results we provide are not constructive, at least in terms of making reference to specific control resources at hand, we propose a way to recast the unitary engineering of a CPTP map as an optimal state steering problem by a direct application of the channel-state Choi-Jamiołkowski duality [22].
It is worth recalling that in his work on universal quantum simulators [12], Lloyd conjectured that exact open-system simulation could be realized even with the dimension of the auxiliary system being reduced from to provided that the latter could be prepared in an arbitrary (pure or mixed) quantum state. A number of explicit counterexamples have subsequently disproved the validity of this conjecture [23, 24, 25]. Interestingly, we find that a version of the above conjecture does hold true, provided that additional classical randomization resources, as well as non-deterministic channel constructions, are allowed (Section 3.3). Specifically, we show that any target, non-extreme map may be obtained as the average over a randomized set of extreme-map dilations, so that any CPTP is reachable by using an auxiliary system that is, indeed, just -dimensional. With respect to Lloyd’s original conjecture, we need only pure state of the auxiliary system, but we allow for sampling from an arbitrary classical distribution on a larger space – one whose cardinality may be up to .
Our study bears similarities, as well as fundamental differences, with the analysis of indirect controllability, in the language of [26]. A first difference is that the task is therein limited to the engineering of unitary evolutions on the target system. In addition, our necessary conditions for the engineering of extreme maps show that it is impossible, for general non-unitary evolutions as we consider, to have CPTP controllability independently of the state of . Our work also complements existing results on controllability of open-system Markovian dynamics, including continuous-time semigroups [27, 28] and discrete-time dynamics [29, 30].
Thanks to the flexible framework we employ, our results may be applied and specialized to a number or existing protocols for universal simulation of CPTP dynamics or for synthesizing specific CPTP maps of interest. In the last part of the paper (Section 6), we specifically re-examine three such applications within our framework – namely, using only coherent Hamiltonian evolutions and coherent quantum feedback. The first application is a constructive approach for simulating arbitrary CPTP maps to arbitrary accuracy, based on binary (“Yes-No”) measurements, proposed in Ref. [13]. While its original formulation employs only a single auxiliary qubit, the control resources also include the ability of resetting it to a known pure state. Here, we provide a fully coherent implementation of the protocol, by examining what resources are needed in this case, as well as the impact of having a mixed ancillary state. As a second illustrative application, we recast in fully coherent picture the feedback decoupling protocol we proposed in Ref. [31]: in this case, the task is to engineer a trivial evolution (an effective “NOOP gate” on the target system) by averaging out the effect of an uncontrollable bath. Lastly, we extend the splitting-subspace approach for stabilizing a quantum state in finite time introduced in Ref. [32], by allowing for a larger auxiliary space and, again, fully coherent resources – which guarantees the desired state or subspace stabilization to be achievable by a single iteration of the protocol.
2 Preliminaries
2.1 Hamiltonian description of controlled open quantum systems
We consider an open-system framework that is flexible enough to include arbitrary control protocols for quantum dynamical engineering and simulation using semi-classical open-loop control and coherent feedback capabilities. We assume that the system of interest, , may be coupled to both an uncontrollable quantum bath, , via a fixed interaction Hamiltonian, as well as to an engineered auxiliary quantum system, , via a tunable interaction. The latter may also couple to in general. We shall refer to the pair collectively as the environment, (see also Fig. 1).
Let denote the Hilbert space of system, ancilla, and physical bath, respectively, with , and being defined accordingly. The initial state on the joint state space at a reference time is assumed to be factorized with respect to the tri-partition . We take the controlled joint dynamics to be generated by a Hamiltonian of the form
[TABLE]
where and account for the free Hamiltonians of and alone, includes the fixed interaction terms, and the control Hamiltonian acts trivially on the uncontrollable component , that is,
[TABLE]
with the (real) functions being the control inputs and the control Hamiltonians having the general form . Note that the case where represents a classical bath may be formally included by moving to the interaction picture with respect to and replacing time-dependent bath operators with classical random variables.
After a time the dynamics generated by is described by the conjugate action of a unitary operator , belonging to the unitary group Since we start from factorized initial conditions and a fixed environment state, the reduced state of the system at time is a linear function of the initial system state, that is, we may write , with
[TABLE]
Thus, a target CPTP map may be obtained via unitary design at time , from environment state , if, by using suitable controls, we can enact a joint unitary such that
A well-known result by Kraus [1] states that a linear map is CPTP if and only if it admits an operator-sum representation (OSR), namely:
[TABLE]
in terms of the so-called Kraus operators , and with denoting the set of density operators on . The above discrete-time dynamics may be seen as the Hilbert-Schmidt dual of an (Heisenberg-picture) map which is CP and unital, namely, a CP map that preserves the identity. It is straightforward to show that the map in Eq. (3) can be indeed represented as an operator sum, and hence it is CPTP [5].
While the OSR is not unique, the minimal number of Kraus operators which is called the Kraus rank of , is well defined, and always [1, 5]. In order to define the Kraus rank precisely, it is convenient to introduce a different representation of CPTP maps, the so-called Choi-Jamiołkowski isomorphism between quantum channels and states. Let be an isomorphic copy of the system’s state space Choose a reference basis in each and consider the maximally entangled state Then, the Choi matrix [22] is defined by
[TABLE]
where is the identity map. It is possible to show that if two CPTP maps have the same Choi matrix, they are the same map, and the Kraus rank of can be uniquely defined as the rank of its associated Choi matrix 111If is countably infinite, then one can partially by-pass the difficulty arising from the normalization by using an unnormalized version of .
From the Kraus representation in Eq. (4), it is easy to see that CPTP maps form a convex set: if and are CPTP, then clearly is CPTP for In the work of Choi [22], a useful characterization of extreme points of the convex CPTP set is provided as well: a map is extreme if and only if (any of) its Kraus representation is such that the set of operators:
[TABLE]
are linearly independent. This is property is invariant with respect to the allowed changes of representation in the . It follows immediately, by comparing dimensions, that extreme points have at most Kraus rank .
Remark: We choose to work in terms of a controlled Hamiltonian setting for the dynamics, as opposed to a reduced dynamics description which is typical, for instance, in master equation approaches to continuous-time dynamics, for a number of reasons. First, this allows us to pinpoint the role of the environmental degrees of freedom on the attainable set of dynamics, while providing access to effectively non-Markovian evolution – which is harder to describe in full generality at the level of reduced dynamics. Most importantly, the Hamiltonian setting does not restrict us to engineering of divisible CPTP maps only, which are known to be a strict subset of all possible ones [33]. This is at variance with the capabilities of control protocols that entail sequences of “elementary” CPTP building blocks, arising either from exponentials of (generally) time-dependent Lindblad generators (hence yielding infinitesimal divisible channels) or from discrete-time dissipative quantum circuits (also accessing divisible but not necessarily infinitesimal divisible quantum channels) – see e.g. [34, 28, 35, 36, 37, 38, 39] for illustrative contributions.
2.2 Reachability definitions and control assumptions
In the following, we will refer to the available control resources , together with the fixed Hamiltonians and bath state , as a control scenario. Part of our results can be framed as controllability results, where one looks at the set of maps that can be enacted, or reached, within a specified control scenario. Formally:
Definition 1
(CPTP reachability by unitary design)* A CPTP map on is reachable at time by unitary design in the control scenario if we can enact a unitary so that in Eq. (3) we have . Likewise, is -approximate reachable at time if we can enact a unitary so that*
[TABLE]
Here, is the quantum total-variation distance, which is a natural measure of distinguishability between quantum states [5, 40, 41]. Equation 7 is equivalent to requesting that the distance between the maps is small in the induced operator norm:
[TABLE]
where Exact reachability is recovered by letting .
Definition 2
(CPTP controllability)* (i) The control scenario is completely CPTP-controllable if any CPTP map on is reachable at some time , and similarly for -reachability. (ii) is extreme CPTP-controllable or, respectively, m-rank CPTP-controllable, if any CPTP map that is extreme or, respectively, of Kraus rank at most , is reachable at some time .*
In the following, a key assumption will be that the control scenario is sufficiently powerful to allow for complete unitary controllability of the joint system ; namely, we shall assume that the set of joint unitary operators that may be obtained by varying the control functions and the corresponding control Hamiltonians – that is, of the form , where denotes the time-ordered exponential – is dense in the full unitary group While this may seem a very strong assumption, it is natural in our context for a number of reasons:
- •
By standard results in geometric control on Lie groups, at least in the case where is effectively finite-dimensional (due, for instance, to the presence of an upper cutoff on energy), this is equivalent to require that the Lie algebra generated by the uncontrolled Hamiltonian, , and the set of control Hamiltonians in Eq. (2), is the full Lie algebra of . It can be shown (see e.g. [42, 10]) that almost every choice of just one pair of Hamiltonians on a single system will guarantee unitary controllability, and one may argue that a similar argument carries over to our composite-system setting as well. Hence, with generic choices of the Hamiltonians, joint unitary controllability will be guaranteed.
- •
In a series of papers, D’Alesssandro and collaborators [43, 26, 44] studied the related concept of indirect (unitary) controllability. The control scenario is equivalent to ours, once the uncontrollable bath is removed, and unitary controllability is granted for the auxiliary system : the task in this case is to determine under which condition all unitaries (and not all CPTP maps, as in our case) may be obtained by a joint evolution on followed by a partial trace on . In [26], the authors show that, if the auxiliary system starts in the completely mixed state, joint unitary controllability is necessary for indirect unitary controllability on . In particular, joint unitary controllability is necessary if requires wants strong indirect unitary controllability, namely, indirect unitary controllability for all initial states of the auxiliary system.
3 A subsystem principle for unitary design of CPTP maps
3.1 The standard approach: Stinespring dilation using a pure ancilla
Consider an OSR of a CPTP map as in Eq. (4), and assume that the system Hilbert space is paired to an auxiliary one, , of dimension . One can the define a map as
[TABLE]
From the TP property, it follows that , thus is an isometric embedding. This is the dual of the Stinespring representation of a CP and unital and it is easy to see that it can be completed to a full unitary dilation of on . One way of achieving this consists in picking a reference state, say, on and identifying the action of on the subspace spanned by with the action of on :
[TABLE]
Since, as we already noted, we only need to choose the rest of in such a way that In the matrix block form induced by the tensor (Kroneker) product, with respect to the basis of , this is equivalent to specify the first column of blocks of as:
[TABLE]
and then to complete the blocks by choosing a set of orthogonal columns for the full matrix. That the first columns are orthogonal follows by:
[TABLE]
By construction, we have:
[TABLE]
In particular, this construction proves that any CPTP map of rank can be obtained from an open-system evolution as in Eq. (3), provided that (i) the auxiliary system dimension is greater or equal than its Kraus rank, , and (ii) its initial state is pure (so-called unitary representation theorem [5]).
3.2 CPTP controllability results from virtual subsystems
In the general setting we consider, where the environment comprises both and an uncontrollable bath in state , and control over the auxiliary state may be limited, the question remains as to whether we can still engineer any desired CPTP map. The key quantum resource is the ability to access a sufficiently pure “portion” of the environment, as captured by the general notion of a “virtual subsystem” [45, 46]. A virtual quantum subsystem, say, , of a larger system (the environment in our case) is associated with a tensor factor of a subspace of :
[TABLE]
for some factor and possibly a remainder space . The system is said to be initialized in a virtual subsystem with state if its state may be decomposed as where is the zero operator on and an arbitrary state on ; in particular, following [41, 19], two types of subsystem-initialization will play a key role in the present context:
Definition 3
(Virtual-subsystem initialization)* System is initialized in a pure state of if for some pure state . Similarly, is -approximately initialized in a pure state of if there exists a pure-state initialization of , , such that*
[TABLE]
The following is a central result of the paper, effectively deriving sufficient conditions for the design of a map with a given Kraus rank from a “subsystem principle”:
Theorem 3.1** (m-rank CPTP controllability)**
Assume joint unitary controllability and factorized initial conditions . Then the target system is -approximate m-rank CPTP controllable if there exists a decomposition of as , with dim, such that is -approximately initialized in a pure state of
*Proof. *We will show that, under the hypothesis, every on of Kraus rank or less is -reachable via a generalized Stinespring construction. If satisfies the condition in Eq. (12), then we may write
[TABLE]
If , we can use the Stinespring construction described above and engineer perfectly, by defining a unitary as in Eq. (9), and then extending its action to the whole as
Next, for , we show that by applying the same unitary to even when is only -approximately initialized in a pure state, the resulting state is -close to the target output for all initial states. In fact, we have:
[TABLE]
where is a TP CP map and hence a trace-norm contraction [5]. Then, from Eq. (13), it follows that for all . Hence the same also ensures -approximate engineering of
It is interesting to note that the standard Stinespring dilation of Eq. (10) is recovered as a special case of the above controllability result in the exact setting, , by letting and .
Remark: The existence of a subsystem of of dimension that is -approximately initialized in a pure state is equivalent to the existence of a subspace, say, of dimension , such that restricted to has trace equal to at least That the initialization implies the existence of such a subspace is clear by considering and the converse implication follows by the same identification, completed by defining additional subspaces , and identifying them with where the complete to an orthonormal basis for All the examples examined in Ref. [19], in which the above construction is carried out explicitly, also work in the present setting. In particular, we know how to construct a -pure subsystem in thermal environments and in -qubit environments, under certain constraints on the entropy. However, it is also clear that having a pure subsystem is, in general, not necessary for CPTP controllability, as we will show explicitly in Sec. 4.
By combining the previous theorem with the characterization of exact purification and cooling obtained in Ref. [19], we also have the following:
Proposition 3.1** (Extreme CPTP controllability)**
The target system is extreme CPTP-controllable if and only if there exists a decomposition , with dim, and initialized in a pure state of Furthermore, the system is -approximately extreme CPTP-controllable if there exists a decomposition of as above, and is -approximately initialized in a pure state of
*Proof. *Since extreme maps must have a Kraus representation with operators satisfying Eq. (6), their Kraus rank can be at most . Thus, the existence of a pure initialization of a -dimensional subsystem is sufficient for their reachability given Theorem 3.1. Necessity follows from the fact that any map that has a single pure state as output is extreme, and the main theorem of [19] shows that the existence of a -dimensional pure subsystem of is a necessary condition to attain these maps.
The (sufficient) conditions for -approximate controllability, follows from a direct application of the same contraction argument used in the proof of Theorem 3.1.
Remark 1: Notice that, while a -dimensional pure subsystem is required in order to be able to engineer any extreme map, there are some maps for which this is clearly not necessary. For example, unitaries are extreme maps, they have Kraus rank one and, under the joint unitary controllability assumption, they do not need any auxiliary resources to be enacted.
Remark 2: The above result poses a clear no-go to the possibility of strong CPTP controllability in the sense of [26], that is, under the requirement that the auxiliary subsystem state be arbitrary: if , it is possible to find states of that do not admit a decomposition with a pure subsystem of dimension [19]. By the above Proposition, this prevents reachability for some extreme maps, and hence CPTP-controllability with an arbitrary environment state.
3.3 Probabilistic unitary design
Theorem 3.1 shows, by extending Stinespring’s construction, that CPTP controllability is certainly guaranteed if there exists a -dimensional subsystem of the environment which is initialized in a pure state, and we have joint unitary controllability. However, this is only a sufficient criterion, and CPTP controllability may still be possible with less taxing resources, for instance, a smaller ancilla.
In this regard, Lloyd conjectured in Ref. [12] that an ancillary system of minimum dimension would suffice to ensure complete CPTP-controllability, provided one could initialize it in any state, pure or mixed. However, this conjecture has been proven wrong in Refs. [23, 24, 25]: one may explicitly identify CPTP maps that need a larger (at least dimensional) ancilla in order to be implemented via unitary design as in Eq. (3). This also proves that the condition in Proposition 3.1 is not sufficient to have complete CPTP controllability. While in fact the work by Lloyd & Viola in Ref. [47] shows that an ancilla as small as a single pure qubit does suffice provided it is resettable (see also Sec. 6.1), from a subsystem-principle perspective this in any case implies the existence of a pure qubit subsystem in the “physical” environments needed to purify on each use. Alternatively, remaining within the coherent Hamiltonian setting under consideration, we may relax the requirement that the target map is implemented deterministically in a “single shot”: as we now show, by allowing for some classical resources and a non-deterministic construction, (exact) CPTP controllability is indeed regained, if we have access to a pure, -dimensional ancilla subsystem, as Lloyd originally conjectured.
In order to formalize the idea, we extend the unitary design method to include classical stochastic resources, which can be used to implement mixtures of evolutions, and hence simulate, on average, CPTP maps that are not extreme 222The idea of “average realization” of CPTP dynamics has been used previously, e.g. in Ref. [30, 48]. However, the first work addresses only state controllability via measurement-based feedback; in the second paper, which is specifically tailored to optical qudit channels, the implementation is non-deterministic in the sense that only a finite probability of success can be achieved in general..
Definition 4
(CPTP reachability on average)* Given a probability distribution , a CPTP map is reachable on average at time if there exists joint unitaries and each can be enacted with probability so that*
[TABLE]
We say that the target system is CPTP-controllable on average if every CPTP map is reachable on average as above.
We can then establish the following:
Theorem 3.2** (Probabilistic reachability on average)**
Let be an arbitrary CPTP map on a -dimensional system, and assume that we can sample from any classical distribution on elements. is reachable on average at time if there exists a decomposition , with dim and initialized in a pure state of . The system is then CPTP-controllable on average.
*Proof. *Proposition 3.1 guarantees that we can implement exactly, without the need of classical randomization, all extreme maps. Any other map can be written as where is extreme. Any can be parametrized (for example, by using Choi’s matrix) as a convex set immersed in a -dimensional space of complex positive-semidefinite matrices, and these in turn can be re-parametrized as a real vector. By Carathéodory’s theorem on the convex hull [49], there are at most components in the sum, and the result follows.
Remark 1: While we have distinguished this way to simulate the output of a target CPTP map from the one described in Eq. (3) as probabilistic, the actual difference is subtle: distinguishing the outputs would be possible via measurement statistics only if we had multiple identical copies that use the same classical stochastic resource. Furthermore, it is instructive to think about maps that can output pure states: it is immediate to see that, for these maps, every map in an equivalent convex combination should also output that same pure state to the corresponding input, otherwise the convex combination would not. This indicates that in the probabilistic channel-design approach, the classical resources are used only to simulate the classical uncertainty in the description of the target map, encoded in the associated convex weights.
Remark 2: -approximate average CPTP-map engineering can be also guaranteed, in the same spirit of unitary engineering, by requesting a -pure state in the virtual subsystem. In this way, each extreme map entering the decomposition of can be obtained within -precision, and the average error will be upper-bounded by
4 Unitary design of CPTP maps beyond the subsystem principle
4.1 A majorization approach for stochastic unitary maps
In the previous sections, we have focused on deriving a subsystem principle for CPTP controllability maps using a Stinespring-type construction: access to a virtual subsystem of the environment initialized in a -)pure state suffices for all possible target maps to be reached. However, if the task of interest is to engineering a specific map or a set of maps that does not include extreme ones, this need not be necessary.
The key assumption is that the spectrum of the environment state majorizes the set of convex weights needed to write as a convex combination of other extreme maps. Recall that a probability distribution is said to majorize another distribution on the same set if the following conditions hold:
[TABLE]
in which case we write It is a well-known result [50] that if and only if there exists a unitary , such that or, compactly in matrix form, by defining , we may write Any matrix that can be obtained as the element-wise modulus square of a unitary is called a unistochastic (or ortho-stochastic) matrix. A well studied class of (unital) CPTP maps that are non-extreme comprises stochastic unitaries,
[TABLE]
where We first show how it is possible to reach this class of maps using majorization, without constraining the purity of a virtual-subsystem initialization:
Theorem 4.1** (Reachability of stochastic unitaries)**
Assume joint unitary controllability controllability and factorized initial conditions on . Let be stochastic unitary, with weights . Then, for every , is -approximate reachable if there exists a decomposition of as , with dim, and an initialization of in , , such that:
* with ;* 2. 2.
**
*Proof. *With respect to the decomposition , define a joint unitary of the form
[TABLE]
where
[TABLE]
implements conditionally on the state of , and is a unitary, with such that . Note that such a exists given hypothesis (i). Then in the case , by noticing that the above is such in Eq. (3) by construction. The fact that also works when follows from the same contraction argument used in proving Theorem 3.1.
4.2 Sufficient conditions for unitary design of general convex-combination maps
A similar majorization-based approach can be used to derive sufficient conditions for the unitary design of more general convex combination of CPTP maps. For the sake of simplicity, we exemplify the construction for the binary case:
[TABLE]
Since the maps are extreme, by Proposition 3.1 they may be obtained as in Eq. (3) if and only if the dimension of the corresponding ancilla Let denote the unitaries that implement on , as in the proof of Theorem 3.1.
Assume that there exist subspaces of say, and , with , such that restricted to each of them has the form , where respectively. Then we can build a decomposition of the environment Hilbert space as:
[TABLE]
and, including , we have, accordingly:
[TABLE]
In analogy to Eq. (14), and relative to the three orthogonal subspaces in the above decomposition, let:
[TABLE]
It can be verified by direct computation that if, as we assumed, allocates probability on the subspace and on then will implement as in Eq. (3). This construction can be directly extended to an arbitrary number of extreme maps, by identifying more subspaces of dimension multiple of , that account for the correct amount of probability, and by letting
[TABLE]
The existence of the required subspaces can be checked via the following algorithm, which constructs, if possible, a choice of subspaces associated with a probability distribution that majorizes the :
- (I)
Diagonalize and order the basis so that the eigenvalues are non-increasing in . Order the convex weight set accordingly.
- (II)
Define to be the smallest number so that the first eigenvalues of are larger than the sum of the first elements . Check if the following holds for every :
[TABLE]
If this is not the case, this method is not viable for engineering the target convex combination.
- (III)
Assuming that Eq. (15) holds, note that the remaining “degrees of freedom” in must be at least and, by construction, they all belong to the kernel of If this is the case, we can identify:
[TABLE]
and complete each subspace to by adding elements of the kernel. By construction, all are isomorphic and of dimension With respect to this decomposition, the state of the environment takes the form:
[TABLE]
where are density operators on and a probability distribution that majorizes
- (IV)
Let be a unitary such that The desired non-extreme map can then be engineered by a block-unitary as above, after the action of on
Remark: For a general non-extreme map, that obeys Eq. (15) but may involve up to extreme maps in its convex-sum decomposition, the construction we presented requires an environment whose dimension is of the order of . While this is clearly much more demanding in terms of unitary control than the standard Stinespring construction, it can be justifiable in limiting cases, in particular in situations where no access to a (nearly) pure auxiliary state is granted.
5 Toward optimal CPTP design via channel-state duality
The previous controllability results rely on the ability of enacting certain unitary evolutions on the joint space of the system of interest and its environment, guaranteed by joint unitary controllability. Checking if this assumption holds for a given control scenario is relatively straightforward, and computationally tractable – upon constructing the control Lie algebra generated by the available Hamiltonians and comparing it to the full one. However, how to explicitly synthesize a control that achieves the intended evolution is, in general (and already at the closed-system, unitary level), a much harder problem. In this section, we propose a way to recast the CPTP control synthesis problem based on unitary design as an optimization problem. The target map is going to be reached exactly whenever the cost to minimize reaches zero. While the problem is guaranteed to have a solution with zero cost if the joint system is unitary controllable, this reformulation can also be useful to investigate whether exact reachability is possible without full joint controllability, or to probe the actual accuracy of the control synthesis for approximate engineering in the presence of mixed virtual subsystem states.
Instead of writing the problem directly for the target CPTP map, the idea is to formulate an equivalent state-to-state transfer problem, albeit on a larger state space, via the Choi-Jamiołkowski representation. One advantage in doing this is that, in principle, a wide array of algorithms are available for optimal state-transfer control problem [42, 51]. Care is needed, nonetheless, since the resulting problem is an atypical one, from the standpoint of standard optimal control algorithms: while most of the optimal state transfer literature considers a “full” state transfer, in our setting the desired output is specified only on a subsystem.
Formally, as we mentioned in Sec. 2.1, in order to exploit state-channel duality we couple the joint system and environment Hilbert space to an isomorphic copy of which we call On , we consider the initial state where is the maximally entangles state, as in Eq. (5). Next, we let a joint unitary act on , while the trivial (identity) evolution is enacted on and we take a partial trace over Let us denote by the resulting density operator on
As a consequence of the Choi-Jamiołkowski isomorphism, namely, the one-to-one correspondence between CPTP maps and Choi matrices, it follows that enacts a target map as in Eq. (3) if and only if (see also Fig. 2 for a pictorial rendering). We can then use this equivalence to recast the “dissipative gate synthesis” problem associated to into an optimal state transfer problem from . Let be the free and control Hamiltonians as introduced in Sec. 2.1, and let be a basis for the operator space Define the components:
[TABLE]
We can then look for the best choice of unitary that implements at time by posing an optimization problem of the following type:
[TABLE]
In fact, once and are specified, the actual optimization variables are the control inputs in Eq. (2): in the above form, the problem is written as if the was the variable for the sake of compactness. Note that here the cost function is the quadratic distance between the components of the desired state on and the one corresponding to the chosen controls, but other choices may be better suited to the scope [52]. The problem is guaranteed to have a solution for which the cost function is zero if the system of interest is CPTP controllable. Developing an explicit algorithm, or a suitable adaptation of an existing one, to solve the above type of optimal-control problems is an interesting direction for future investigation.
6 Illustrative applications
In this section, we revisit some simple existing protocols for engineering a target CPTP dynamics within the present framework of unitary design problems. We highlight their use of limited resources, both in terms of the dimension of the environment and in the types of available joint dynamics. Since we work within a coherent Hamiltonian-control setting, we stress that having access to a suitable set of conditional operations, along with other (protocol-dependent) control resources, will be instrumental in order to replace classical (measurement-based) feedback protocols with protocols employing only coherent feedback.
6.1 Coherent implementation of binary-tree protocols for channel construction
The first method for universal approximate engineering of arbitrary CPTP maps was proposed in Ref. [13]. In terms of auxiliary quantum resources, it only needs the smallest possible quantum environment: a single qubit, albeit the latter must be resettable in a known pure state. While in practice the resulting map is obtained with accuracy , due to the presence of a Hamiltonian coherent averaging procedure [16], the accuracy is only limited by how fast the averaging cycle can be enacted. The original proposal relies crucially on discrete-time, measurement-based single-bit feedback, with an explicit “binary-tree” construction being provided to implement the required generalized quantum measurement. This construction has been subsequently improved both in terms of making contact with specific universal gate sets and in terms of efficiency [53, 54]. Here, we show how to achieve the same task by using only coherent evolutions, at the cost of substituting the single resettable auxiliary qubit with multiple copies of the same, if higher-rank maps are considered. In the light of Proposition 3.1, we know that having access to a sufficiently large (albeit not necessarily pure) auxiliary subsystem is unavoidable if we aim to unitarily engineer a set of evolutions which contains all the extreme ones.
6.1.1 Rank-two channels with pure ancilla.
Having a pure ancilla of rank 2 guarantees exact CPTP controllability of the system via a Stinespring-type dilation, yet does not provide a constructive procedure to synthesize an effective joint unitary evolution in terms of the available resources. The protocol we describe, on the other hand, provides a sequence of unitary evolutions that approximates an effective which we know exists, by using only a specific class of controlled operations. The relevant resources and task may be summarized as follows:
Task
To approximately enact an arbitrary CPTP map of Kraus rank 2 on a -dimensional target system .
Environment
A two-level system, with state space , initially in a pure state, say, . No interaction with an uncontrollable bath is assumed to be present.
Control resources
We need an entangling Hamiltonian of the form where is a tunable parameter and is a projector onto a pure state of , while . In addition, complete (ideally, instantaneous) Hamiltonian control is required on in order to implement Hamiltonian averaging, as well as arbitrary conditional unitaries of the form:
[TABLE]
where are arbitrary unitaries on 333In the original protocol [13], these conditional unitaries are substituted by measurement-based feedback and unitary control on alone, conditional on the output of the feedback..
Given the above resources, the construction is based on two simple mathematical observations: (i) every CPTP map with Kraus rank 2 is associated to Kraus operators that admit a polar decomposition [50] of the form
[TABLE]
where is a positive-semidefinite operator on . This follows from the fact that if correspond to a CPTP map, they satisfy which implies that their respective polar components must be lesser or equal than the identity, simultaneously diagonalizable and their square sum to the identity. (ii) Owing to the spectral theorem, every positive-semidefinite can be written as with convex weights, . Based on these observations, we now show that it is possible to approximate (to arbitrary accuracy, in principle) any rank-two CPTP evolution by the following sequence of coherent dynamics (see also Fig. 3):
- (I)
Assume that has a OSR in terms of a pair of Kraus operators with a polar decomposition as in Eq. (16). Let and be coupled by as above, and evolve for a time interval while applying an Hamiltonian averaging technique [16, 55] aimed to simulate , with an arbitrary positive semidefinite operator, as the new effective Hamiltonian. In view of the above observations, this is possible by dividing a finite evolution interval in cycles of duration , and each in sub-intervals of length , that is, , and . At the beginning of the first sub-interval we apply a unitary on , at the second at the third , and so on. If is sufficiently large (formally, ), the effective Hamiltonian over each cycle is simply the time average, namely,
[TABLE]
with the leading-order correction Over the time duration , this results in the joint evolution:
[TABLE] 2. (II)
In order to obtain the Kraus operators in the decomposition (16), we next to apply a conditional unitary . Once is traced out, the net dynamics on is a CPTP map with operators as desired.
6.1.2 Beyond rank-two channels.
In order to implement CPTP maps of higher rank by using the specified coherent-control resources, we needs more copies of the pure auxiliary qubit – or, as in the original scheme, the ability to dissipatively reset it to the initial pure state, which however is not viable in the present setting.
The basic idea is the following: In order to obtain a map Kraus rank three, associated to Kraus operators we first use the procedure described above to implement and an intermediate operator Then, conditionally on the state of the first ancilla qubit, we performs another unitary design, associated to a CPTP map of Kraus rank 2, but now with Kraus operators , . This is still a TP map, since we have:
[TABLE]
By tracing out , this leaves a CPTP map on the system, that approximates the target map of rank 3. Such a “nested” construction can be iterated to a general rank in principle. In this case, the number of auxiliary qubits that are needed is . In terms of the dimension of the auxiliary quantum resources that are employed, and depending on the system dimension , this procedure is generally inefficient with respect to the minimal Stinespring construction, and more so with respect to the probabilistic design of Sec. 3.3; yet, it has the advantage of providing a systematic approach to construct the needed Kraus operators by following the algorithm.
6.1.3 Noisy ancilla.
It is worth investigating, at least in the simplest, rank-two case, what are the implications of relaxing the assumption that the auxiliary environment is purely initialized. Let us assume that the initial state for is mixed, i.e., has the general form By following the same evolution of Eq. (17) as in the pure-state case, the joint system-environment state after time is:
[TABLE]
Thus, the reduced states, conditional on being in or respectively, become :
[TABLE]
[TABLE]
Since these are non-trivial convex combination of single-operator CP maps, in contrast with the pure case (which is recovered by posing ), we cannot exploit the polar decomposition in (16) and obtain the desired reduced dynamics by applying a conditional unitary 444 Interestingly, the above issue does not occur for a rank-2 CPTP map whose Kraus operators are Hermitian and positive-semidefinite (hence, associated to a unital map), as no unitary is needed in the polar decomposition. However, the method we outlined would still incur in problems for higher-rank Hermitian-Kraus maps, since a unitary evolution conditional on the auxiliary state is needed then.. If we do apply the same conditional operation of the pure-ancilla case, the same contraction argument of the previous sections holds, and the error in the final implementation can be bounded in the norm, depending on . Therefore, with a non-pure ancilla, arbitrary accuracy can no longer be achieved even in the limit of arbitrarily fast control and perfect averaging.
6.2 Coherent implementation of feedback-decoupling for quantum memory
In principle, the joint unitary controllability assumption implies that we can obtain any unitary dynamics on the system – in particular, the trivial one, corresponding to engineering a quantum memory, or a NOOP gate. In practice, however, it may be hard to find explicit controls that enact it while complying with practical constraints, and that can ensure robust performance with respect to partial knowledge and uncertainty about the coupling with the bath and its internal dynamics.
While open-loop dynamical decoupling techniques offer a method of choice in many quantum information settings of interest [16, 56], in Ref. [31] we presented a way to remove the effect of unwanted environmental interactions and effectively decouple from by combining coherent-control capabilities with measurement-based single-bit feedback. Despite being less flexible in regard to the types of system-bath interactions that are able to be suppressed, feedback-enacted decoupling may offer important advantages on time-scale requirements and compensate for uncorrelated noise, unlike open-loop schemes. Recently, the method has been successfully demonstrated by using a fully coherent implementation to achieve a NOOP gate on a nitrogen-vacancy qubit device in the presence of dephasing noise [57]. Here, we recast the original single-bit feedback strategy in the unitary design framework, focusing on the exact correction of an unwanted evolution at a target (finite) time . A related strategy for approximate (first-order, short-time) suppression of the corresponding Hamiltonian generator is proposed in the original work, and can also be adapted to the present framework along similar lines. The protocol may be described as follows:
Task
Enact a NOOP gate on the target system at time by removing the net effect of its interaction with the uncontrollable bath , so that an arbitrary initial state is preserved.
Environment
The environment comprises both an auxiliary two-level system, with state space , initially in a pure state where , and an uncontrollable bath in an arbitrary initial state
Free dynamics
, where and are arbitrary, and the unwanted coupling Hamiltonian In order for the method to work, we need to have a certain eigenvalue structure, that makes it resemble a generalized Pauli matrix – the precise form is given in the protocol below.
Control resources
We need fast (ideally, instantaneous) conditional unitary transformations of the form:
[TABLE]
where are arbitrary unitaries on the system, and an identity action is understood on the bath 555In the original proposal [31], some of these conditional unitaries are substituted by von Neumann measurement and feedback, implementing unitary evolutions on alone, conditionally on the output of the measurement. .
The basic steps of the protocol are (see also Figure 4):
- (I)
Rapidly entangle and , by performing a conditional gate of the form . 2. (II)
Let the system evolve freely in the presence of , up to time , under the joint unitary propagator 3. (III)
Apply a second fast conditional unitary, the inverse of the one in step (I), that is: 4. (IV)
Apply a Hadamard transformation [5] to the ancilla qubit .
The resulting joint state on the whole system at this stage may be written as:
[TABLE]
where and
[TABLE]
The form of shows that the evolution conditional to on already enacts, at time , an exact average of the unitary propagators and . To our aim, such an average should return an operator of the form with an arbitrary operator on the bath, thus yielding a trivial evolution on the target system, as desired. In Ref. [31], we show that can achieve this task if and only if satisfies the following property: when it is written as a block-matrix, accordingly to the tensor structure of (notice the swap of the two factors, for convenience in analyzing its block structure), its blocks are of the form:
[TABLE]
where is a normal matrix whose eigenvalue , in decreasing order, must further satisfy a mixing condition, namely, for all
The last required step in the protocol aims to transform into an operator of the form as well, ensuring trivial dynamics on the system of interest irrespective of the auxiliary system. If has the block-form (19), then it is easy to see that the corresponding blocks for are of the form Different blocks can be made proportional to one another, via unitary conditional operations, if and only if is itself proportional to a unitary, say, . Then the following conditional operation will correct the “wrong” averaging implemented by :
- (V)
Apply a third conditional unitary
By explicitly writing it is easy to see that blocks in Eq. (19) will be linear combinations of and powers of If and satisfies the mixing condition stated above, then feedback decoupling is possible. More explicitly, can be corrected if, up to a change of basis in and a reshuffling of its eigenvalues, we have Physically, this means that the noise induced by the unwanted system-bath coupling is purely dephasing, and further subject to the above symmetry constraint. When the target system is a qubit, , as for instance in the experimental implementation of [57], this constraint is automatically satisfied in the pure dephasing regime.
6.3 Coherent implementation of splitting-subspace approach for quantum stabilization
The preparation of a target quantum state in a system of interest, in a way that is independent with respect to its initial state, is a key task in quantum control, motivated by applications ranging from quantum information processing to quantum purification and cooling, see e.g. [58, 59, 60, 61, 19] and references therein. If the target state is also required to be invariant (a fixed point) for the underlying dynamics, then from a system-theory standpoint the task becomes one of stabilization. This offers the important advantage of not only generating (either asymptotically or in finite time) the quantum state of interest; in addition, it can also maintain it in a way that is insensitive to certain types of errors and uncertainties – as we discussed in detail in Refs. [62, 63]. It is clear that, in order for to converge towards its steady state or, more generally, a steady-state subspace, by “forgetting” its initial condition, the evolution on must be irreversible. The required stabilizing continuous-time or discrete-time dynamics may be synthesized either in a purely open-loop fashion or, most commonly, by relying on measurement-based or coherent quantum feedback with a suitable auxiliary system (see e.g. [10] for an overview).
From the perspective of unitary design, we showed in Ref. [19] how the resources needed to exactly stabilize a target pure state must include a purely-initialized virtual subsystem of appropriate dimension. Here, building on a constructive approach introduced in Ref. [32], we demonstrate how to use a sequence of unitary operations to stabilize an arbitrary pure state or a subspace on in finite time. With respect to the original proposal, which involved repeated uses of a single ancillary qubit, we allow for a larger auxiliary system, in the same spirit of Sec. 6.1. This, in turn, enables us to avoid the need for a dissipative resetting operation and obtain the desired output effectively in a single step. The protocol may be described as follows:
Task
Given a target subspace of dimension enact a CPTP map on so that for any . This is equivalent to requiring for all initial states, where is the orthogonal projection onto
Environment
An auxiliary system , where is the first integer greater than , initially in a pure state, say, No interaction with an uncontrollable bath is considered.
Control resources
With respect to , we need fast (ideally, instantaneous) conditional unitaries of the form:
[TABLE]
where the orthogonal projectors are a resolution of the identity on , to be specified later, and are unitary operations on , such that . Additionally, we need conditional unitaries of form
[TABLE]
where are unitaries on
The starting point of the procedure is to decompose as the direct sum
[TABLE]
where the subspaces , , are isomorphic orthogonal copies of , with and The idea is to use to “encode” in the state of the auxiliary system the information regarding which of the subspaces is populated, and then to use in order to obtain a final state that populates only the target one. To do so, we choose in Eq. (20) as the orthogonal projections onto the corresponding In addition, we choose in Eq. (21) such that Notice that this is possible if and only if for all , as is the case with the chosen as above. Formally, this simple protocol then consists of the following steps:
- (I)
Apply ; 2. (II)
Apply .
It is a matter of direct calculation to verify that the final evolution is:
[TABLE]
and by construction. The protocol is illustrated schematically in Fig. 5. A few remarks are in order:
- •
Eq. (22) shows that such a splitting-subspace approach provides a general way to “embed” a measurement-based, discrete-time feedback protocol, such as those described in Ref. [64], within a coherent-feedback picture. In fact, the same CPTP evolution of Eq. (22) may be obtained as the average outcome of the following procedure: first, perform a projective measurement of an observable with spectral decomposition ; next, apply a unitary evolution conditional on the th outcome of the measurement.
- •
When the target is a pure state, , in the above protocol we need to choose , which corresponds to the Kraus rank of the extreme CPTP map that realizes the target all-to-one evolution, namely, The amount of resources requested by this coherent implementation is thus optimal. Optimality remains true when the target is a subspace, and is a multiple of . This may be seen by recasting the problem as the stabilization of the pure state of a virtual subsystem , defined via the decomposition Then the same necessary conditions about exact pure-state preparation ensure that a pure ancilla of dimension is precisely the minimal auxiliary resource that allows for engineering the target. We expect a similar result to hold more generally, when does not divide .
- •
While in the coherent-feedback loop described above we have only considered exact stabilization (hence, an auxiliary system in a pure state), it is straightforward to extend the method to the case where is mixed, as long as contains a virtual subsystem of sufficient dimension initialized in a pure state. Since the resulting evolution a trace-norm contraction, if the initialization is only -approximate the final state will be at most -distant from the intended target.
- •
The possibility of stabilizing subspaces in one step allows us to envision a coherent-feedback implementation of the quasi-local dissipative circuits introduced in Refs. [63] to stabilize entangled pure states in finite time, robustly with respect to the order of the applied maps. Such circuits can be constructed when the target state is able to be represented as a product state with respect to a suitable, locality-constrained decomposition in virtual subsystems of the multipartite system. In this setting, in order to implement the quasi-local stabilizing maps, we would need to couple the target system to an auxiliary system consisting of isomorphic copies of each virtual subsystem – each prepared in a known pure state, in a way that respects the specified locality constraints.
7 Outlook
We have presented a mathematical characterization of the resources needed to engineer CPTP open quantum dynamics based on a coherent, unitary design approach – as informed by a virtual-subsystem perspective. While our emphasis has been on establishing general (non-constructive) channel controllability results, we have shown how our framework is highly flexible and easily applicable to the description of existing constructive schemes for universal open-system simulation or quantum channel construction. In addition to the illustrative applications we have discussed, other quantum protocols of interest, which may be well-worth analyzing in our unitary-design framework, include collisional and repeated interaction models for non-Markovian dynamics [65, 66]. From a control-theoretic standpoint, developing explicit optimal-control algorithms tailored to the equivalent state-transfer problem we have associated to quantum-channel synthesis is, as we mentioned, an interesting and natural direction for investigation. Likewise, while the present analysis has relied crucially on the assumption of complete unitary controllability of system and environment together, it would be desirable to characterize more general scenarios where only partial controllability is assumed – possibly exploring relationships between exact and approximate controllability notions, in analogy to closed quantum systems [67].
Acknowledgements
It is a pleasure to thank David Reeb for insightful discussions that partially motivated the present work. Work at Dartmouth was supported by the National Science Foundation through grant no. PHY–1620541 and the Constance and Walter Burke Special Projects Fund in Quantum Information Science.
References
- [1]
Kraus K 1983 States, Effects, and Operations: Fundamental Notions of Quantum Theory Lecture Notes in Physics (Springer-Verlag, Berlin)
- [2]
Davies E B 1976 Quantum Theory of Open Systems (Academic Press, USA)
- [3]
Breuer H P and Petruccione F 2006 The Theory of Open Quantum Systems (Oxford University Press, UK)
- [4]
Streater R F 1995 Statistical Dynamics: A Stochastic Approach to Nonequilibrium Thermodynamics (Imperial College Press, London)
- [5]
Nielsen M A and Chuang I L 2002 Quantum Computation and Information (Cambridge University Press, Cambridge)
- [6]
Petz D 2008 Quantum Information Theory and Quantum Statistics (Springer-Verlag, Berlin)
- [7]
Barchielli A and Gregoratti M 2009 Quantum Trajectories and Measurements in Continuous Time: The Diffusive Case Lecture Notes in Physics (Springer-Verlag, Berlin)
- [8]
Belavkin V P 1992 J. Multivar. Anal. 42 171
- [9]
Wiseman H M and Milburn G J 2010 Quantum Measurement and Control (Cambridge University Press, New York)
- [10]
Altafini C and Ticozzi F 2012 IEEE Trans. Aut. Cont, 57 1898
- [11]
Wiseman H M and Milburn G J 1993 Phys. Rev. Lett. 70 548
- [12]
Lloyd S 1996 Science 273 1073
- [13]
Lloyd S and Viola L 2001 Phys. Rev. A 65 010101
- [14]
Lanyon B P, Hempel C, Nigg D, Müller M, Gerritsma R, Zähringer F, Schindler P, Barreiro J T, Rambach M, Kirchmair G, Hennrich M, Zoller P, Blatt R and Roos C F 2011 Science 334 57
- [15]
Schindler P, Müller M, Nigg D, Barreiro J T, Martinez E A, Hennrich M, Monz T, Diehl S, Zoller P and Blatt R 2013 Nature Phys. 9 361
- [16]
Viola L, Knill E and Lloyd S 1999 Phys. Rev. Lett. 82 2417
- [17]
Ticozzi F and Viola L 2009 Automatica 45 2002
- [18]
Chiruvelli A and Jacobs K 2008 Phys. Rev. A 77 012102
- [19]
Ticozzi F and Viola L 2014 Sci. Rep. 4 5192
- [20]
Stinespring W F 1955 Proc. Am. Math. Soc. 6 211
- [21]
Wu L A, Segal D and Brumer P 2012 Sci. Rep. 3 1824
- [22]
Choi M D 1975 Lin. Alg. Appl. 10 285
- [23]
Terhal B M, Chuang I L, DiVincenzo D P, Grassl M and Smolin J A 1999 Phys. Rev. A 60 881
- [24]
Narang G and Arvind 2007 Phys. Rev. A 75 032305
- [25]
Zalka C and Rieffel E 2002 J. Math. Phys. 43 4376
- [26]
D’Alessandro D 2012 Sys. Control Lett. 62 188
- [27]
Altafini C 2004 Phys. Rev. A 70 062321
- [28]
Dirr G, Helmke U, Kurniawan I and Schulte-Herbrüggen T 2009 Rep. Math. Phys. 64 93
- [29]
Wu R, Pechen A, Brif C and Rabitz H 2007 J. Phys. A 40 5681
- [30]
Albertini F and Ticozzi F 2011 Automatica 47 2451
- [31]
Ticozzi F and Viola L 2006 Phys. Rev. A 74 052328
- [32]
Baggio G, Ticozzi F and Viola L 2012 Quantum state preparation by controlled dissipation in finite time: From classical to quantum controllers 51st IEEE Conference on Decision and Control proceedings pp 1072–1077
- [33]
Wolf M M and Cirac J I 2008 Commun. Math. Phys. 279 147
- [34]
Bacon D, Childs A M, Chuang I L, Kempe J, Leung D W and Zhou X 2001 Phys. Rev. A 64 062302
- [35]
Sweke R, Sinayskiy I, Bernard D and Petruccione F 2015 Phys. Rev. A 91 062308
- [36]
Wang D S, Berry D W, de Oliveira M C and Sanders B C 2013 Phys. Rev. Lett. 111 130504
- [37]
Wang D S and Sanders B C 2015 New J. Phys. 17 043004
- [38]
Zanardi P, Marshall J and Campos Venuti L 2016 Phys. Rev. A 93 022312
- [39]
P. D. Johnson, F. Ticozzi, and L. Viola, “Exact stabilization of entangled states in finite time by quasi-local dynamical maps,” forthcoming (2017)
- [40]
Blume-Kohout R, Ng H K, Poulin D and Viola L 2008 Phys. Rev. Lett. 100 030501
- [41]
Ticozzi F and Viola L 2010 Phys. Rev. A 81 032313
- [42]
D’Alessandro D 2007 Introduction to Quantum Control and Dynamics Applied Mathematics & Nonlinear Science (Chapman & Hall/CRC)
- [43]
Albertini F and D’Alessandro D 2013 J. Phys. A 46 045301
- [44]
D’Alessandro D and Romano R 2012 IEEE Transactions on Automatic Control 57 2009
- [45]
Knill E, Laflamme R and Viola L 2000 Phys. Rev. Lett. 84 2525
- [46]
Zanardi P 2001 Phys. Rev. Lett. 87 077901
- [47]
Lloyd S and Viola L 2002 Phys. Rev. A 65 010101
- [48]
Piani M, Pitkanen D, Kaltenbaek R and Lütkenhaus N 2011 Phys. Rev. A 84 032304
- [49]
Carathéodory C 1911 Rendiconti del Circolo Matematico di Palermo (1884-1940) 32 193
- [50]
Horn R A and Johnson C R 1990 Matrix Analysis (Cambridge University Press, New York)
- [51]
Machnes S, Sander U, Glaser S J, de Fouquières P, Gruslys A, Schirmer S and Schulte-Herbrüggen T 2011 Phys. Rev. A 84 022305
- [52]
Grace M D, Dominy J, Kosut R L, Brif C and Rabitz H 2010 New J. Phys. 12 015001
- [53]
Iten R, Colbeck R and Christandl M 2016 E-print: arXiv:1609.08103
- [54]
Shen C, Noh K, Albert V V, Krastanov S, Devoret M H, Schoelkopf R J, Girvin S M and Jiang L 2016 ArXiv:1611.03463
- [55]
Bookatz A D, Wocjan P and Viola L 2014 New J. Phys. 16 045021
- [56]
Khodjasteh K, Green T J, Sastrawan J, Hayes D, Biercuk M J and Viola L 2013 Nature Commun. 4 2045
- [57]
Hirose M and Cappellaro P 2016 Nature 532 77–80
- [58]
Kraus B, Diehl S, Micheli A, Kantian A, Büchler H P and Zoller P 2008 Phys. Rev. A 78 042307
- [59]
Ticozzi F and Viola L 2008 IEEE Trans. Aut. Contr. 53 2048
- [60]
Schön C, Solano E, Verstraete F, Cirac J I and Wolf M M 2005 Phys. Rev. Lett. 95 110503
- [61]
Verstraete F, Wolf M M and Cirac J I 2009 Nature Phys. 5 633
- [62]
Ticozzi F, Zuccato L, Johnson P D and Viola L 2016 Eprint arXiv:1612.05554
- [63]
Johnson P D, Ticozzi F and Viola L 2017 ArXiv:1703.06183
- [64]
Bolognani S and Ticozzi F 2010 IEEE Trans. Aut. Contr. 55 2721
- [65]
Rybár T, Filippov S N, Ziman M and Bužek V 2012 J. Phys. B 45 154006
- [66]
Pellegrini C and Petruccione F 2009 J. Phys. A 42 425304
- [67]
Boscain U, Gauthier J P, Rossi F and Sigalotti M 2015 Commun. Math. Phys. 333 1225
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] Kraus K 1983 States, Effects, and Operations: Fundamental Notions of Quantum Theory Lecture Notes in Physics (Springer-Verlag, Berlin)
- 2[2] Davies E B 1976 Quantum Theory of Open Systems (Academic Press, USA)
- 3[3] Breuer H P and Petruccione F 2006 The Theory of Open Quantum Systems (Oxford University Press, UK)
- 4[4] Streater R F 1995 Statistical Dynamics: A Stochastic Approach to Nonequilibrium Thermodynamics (Imperial College Press, London)
- 5[5] Nielsen M A and Chuang I L 2002 Quantum Computation and Information (Cambridge University Press, Cambridge)
- 6[6] Petz D 2008 Quantum Information Theory and Quantum Statistics (Springer-Verlag, Berlin)
- 7[7] Barchielli A and Gregoratti M 2009 Quantum Trajectories and Measurements in Continuous Time: The Diffusive Case Lecture Notes in Physics (Springer-Verlag, Berlin)
- 8[8] Belavkin V P 1992 J. Multivar. Anal. 42 171