The UMCD Dataset
Danilo Avola, Gian Luca Foresti, Niki Martinel, Daniele Pannone and, Claudio Piciarelli

TL;DR
The paper introduces the UMCD dataset, a collection of geo-referenced low-altitude UAV video sequences designed for mosaicking and change detection tasks, filling a gap in publicly available datasets.
Contribution
It provides the first publicly available low-altitude UAV video dataset specifically for mosaicking and change detection research.
Findings
First dataset of its kind for low-altitude UAV mosaicking and change detection
Includes five diverse reference scenarios
Enables benchmarking of low-altitude UAV algorithms
Abstract
In recent years, the technological improvements of low-cost small-scale Unmanned Aerial Vehicles (UAVs) are promoting an ever-increasing use of them in different tasks. In particular, the use of small-scale UAVs is useful in all these low-altitude tasks in which common UAVs cannot be adopted, such as recurrent comprehensive view of wide environments, frequent monitoring of military areas, real-time classification of static and moving entities (e.g., people, cars, etc.). These tasks can be supported by mosaicking and change detection algorithms achieved at low-altitude. Currently, public datasets for testing these algorithms are not available. This paper presents the UMCD dataset, the first collection of geo-referenced video sequences acquired at low-altitude for mosaicking and change detection purposes. Five reference scenarios are also reported.
Click any figure to enlarge with its caption.
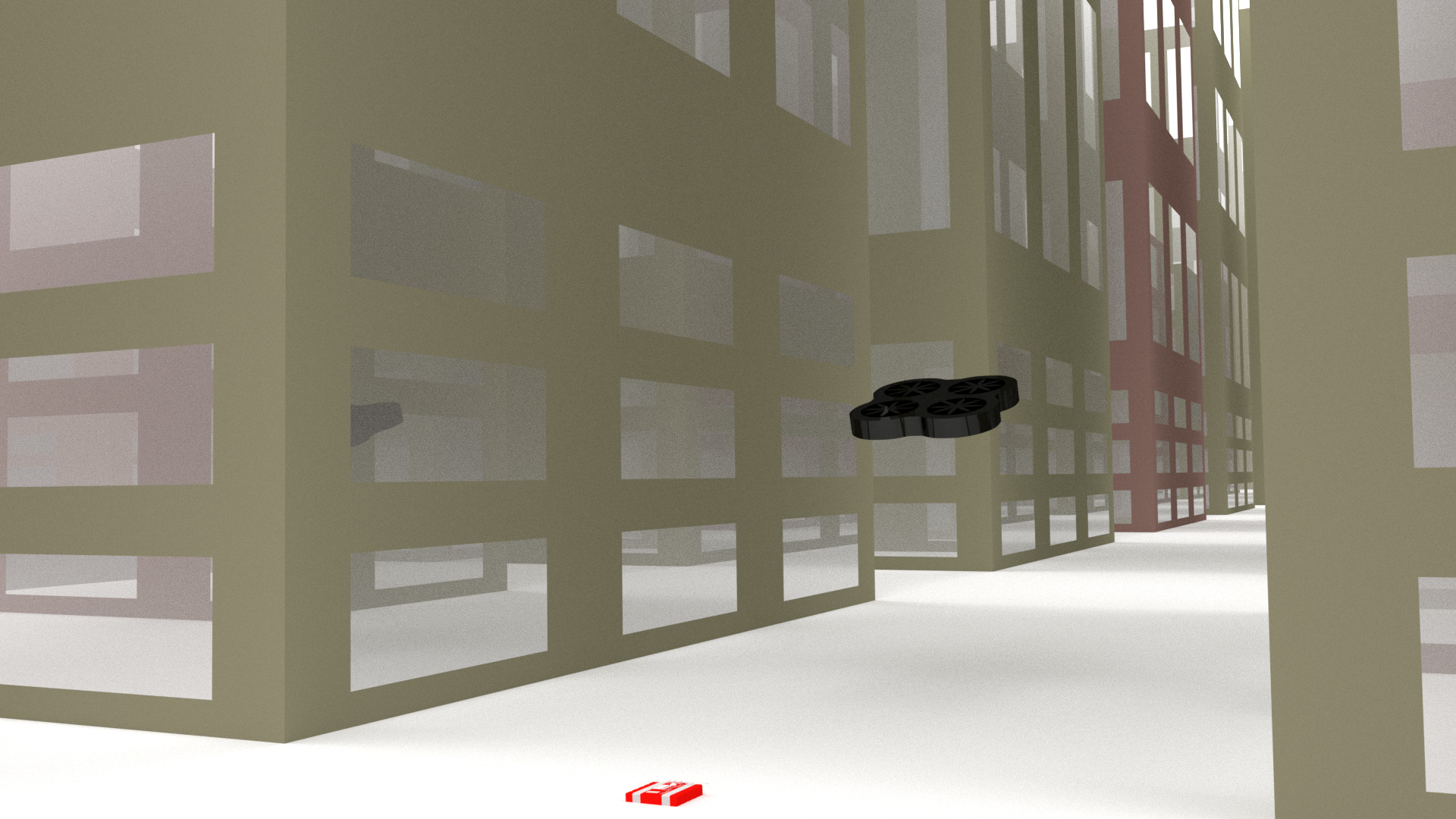 Figure 1
Figure 1 Figure 2
Figure 2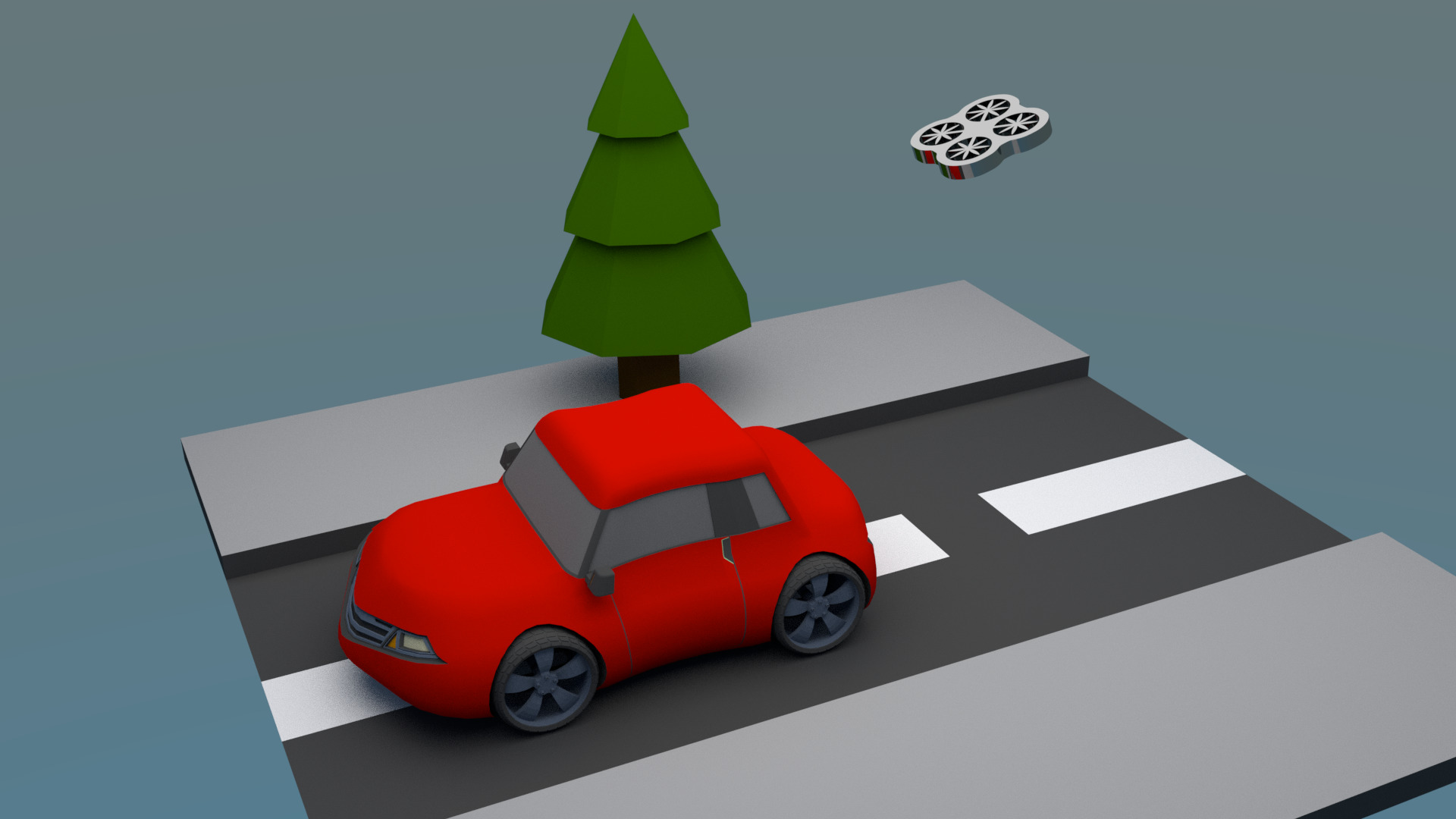 Figure 3
Figure 3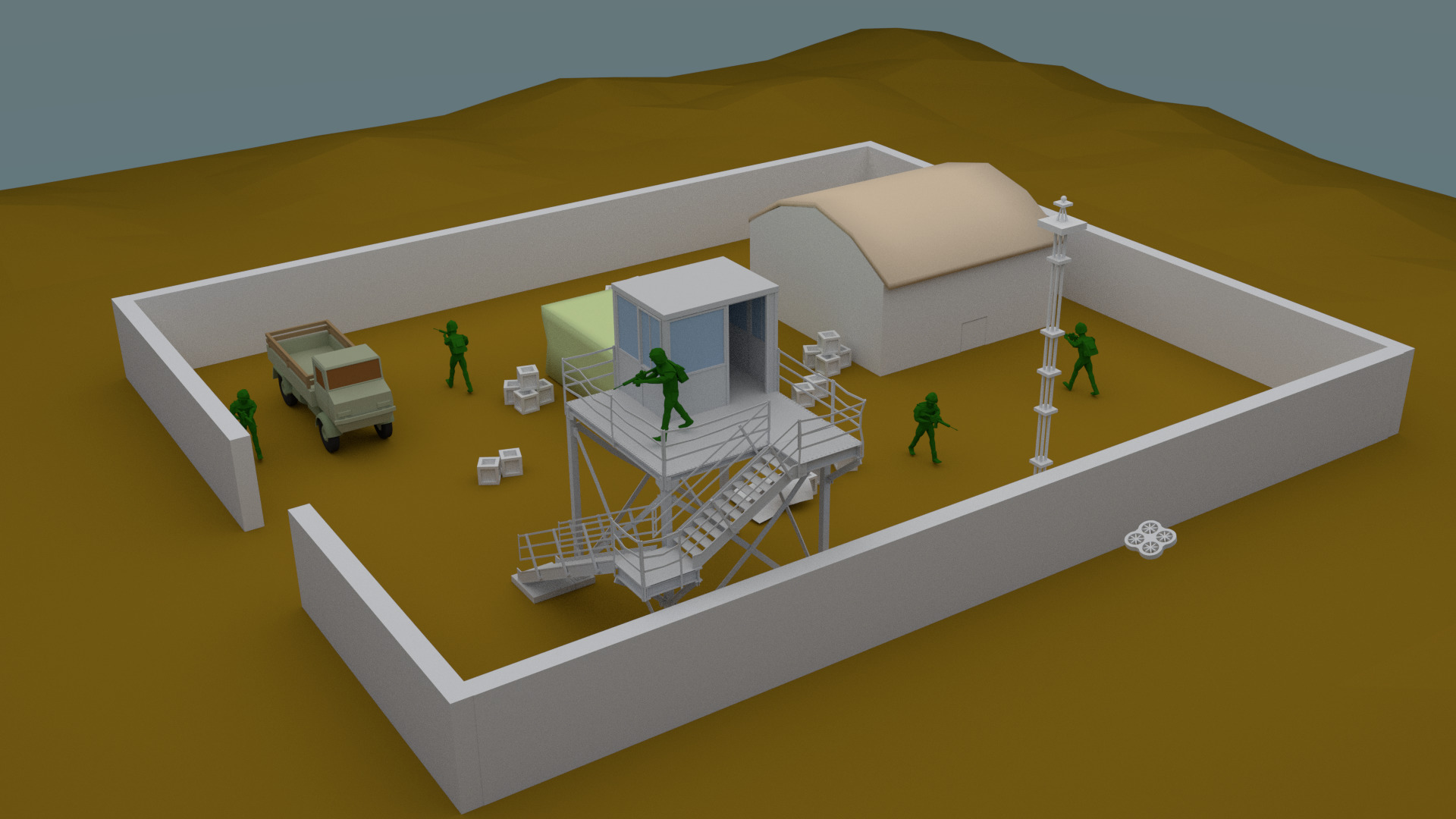 Figure 4
Figure 4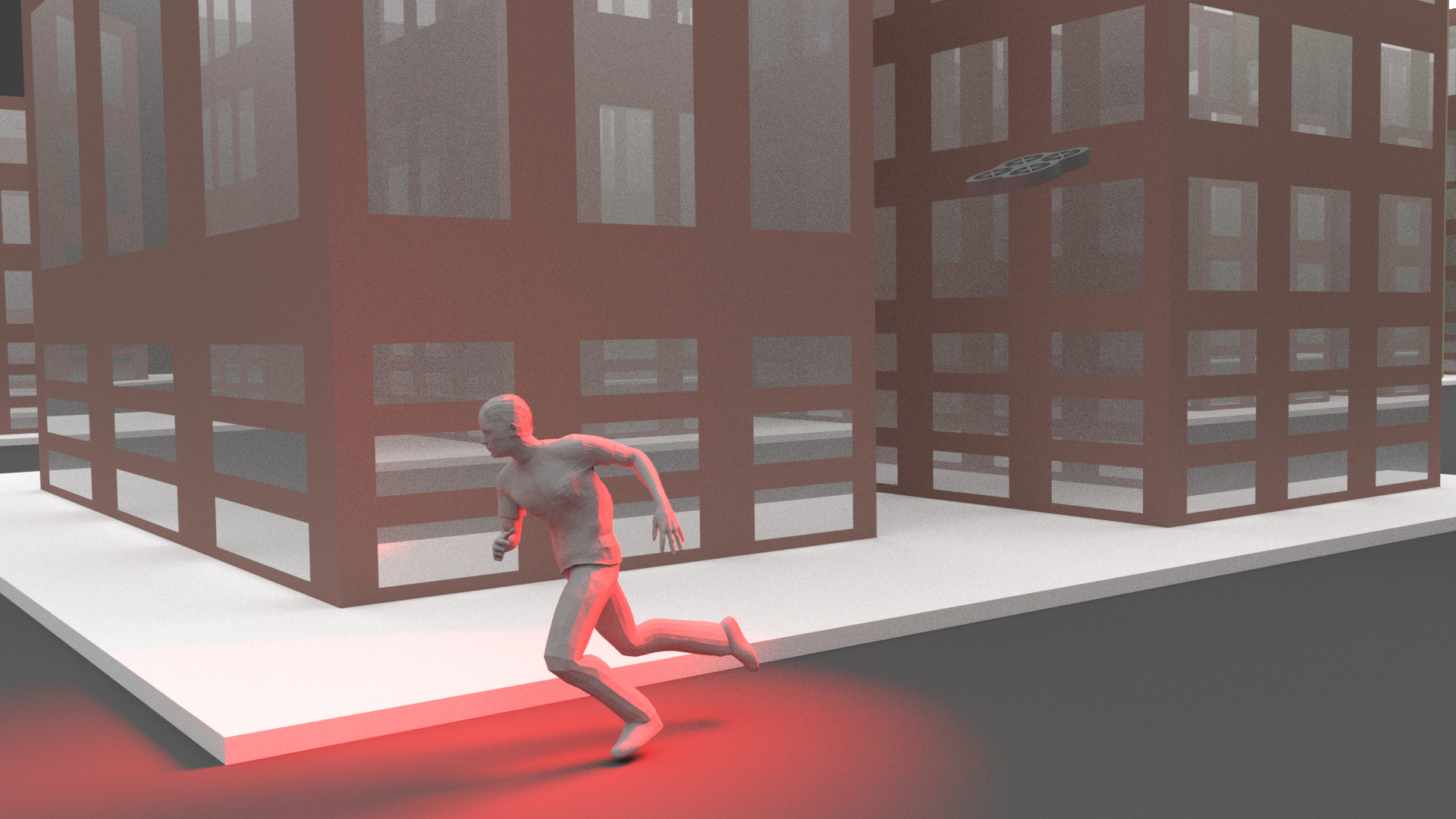 Figure 5
Figure 5Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
The UMCD Dataset
Danilo Avola1, Gian Luca Foresti1, Niki Martinel1, Daniele Pannone2 and Claudio Piciarelli1
1Department of Mathematics, Computer Science and Physics, University of Udine, Via delle Scienze 206, 33100 Udine, Italy
2Department of Computer Science, Sapienza University, Via Salaria 113, 00198 Rome, Italy
Abstract
In recent years, the technological improvements of low-cost small-scale Unmanned Aerial Vehicles (UAVs) are promoting an ever-increasing use of them in different tasks. In particular, the use of small-scale UAVs is useful in all these low-altitude tasks in which common UAVs cannot be adopted, such as recurrent comprehensive view of wide environments, frequent monitoring of military areas, real-time classification of static and moving entities (e.g., people, cars, etc.). These tasks can be supported by mosaicking and change detection algorithms achieved at low-altitude. Currently, public datasets for testing these algorithms are not available. This paper presents the UMCD dataset, the first collection of geo-referenced video sequences acquired at low-altitude for mosaicking and change detection purposes. Five reference scenarios are also reported.
I Introduction
Recently, the use of medium and large UAVs in civilian and military activities is increased considerably [1, 2, 3]. Usually, these UAVs acquire video sequences at very high-altitude (e.g., above 100 meters) for large-scale operations, such as vegetation monitoring and mapping of buildings. In a wide range of applications, including surveillance [4, 5], search and rescue [6, 7, 8, 9], tracking [10, 11, 12], and many others, often video sequences acquired at very low-altitude are needed. In particular, these sequences are required in all those application contexts in which a frequent or continuous checking of an area of interest is necessary. Mosaicking and change detection techniques [13, 14, 15] can support this type of tasks to detect, track, and classify static and moving entities on the ground. Currently, public datasets for testing mosaicking algorithms contain sequences acquired at very high-altitude, while, datasets that contain geo-referenced sequences acquired at low-altitude for testing change detection algorithms are not available. This paper proposes the UAV Mosaicking and Change Detection (UMCD) dataset to fill this lack. The dataset is composed of two main sets of challenging video sequences acquired at very low-altitude. The first set consists of 30 not geo-referenced sequences that can be used to evaluate mosaicking algorithms. The second set is made up of 10 pairs of geo-referenced sequences (i.e., 20 videos) in which the first can be used to build the mosaic and the second, acquired on the same path, can be used to test change detection algorithms. The geo-referencing allows developers to reduce drastically the number of matching during the search of entities. The UMCD dataset is freely available only for research purposes at the following link: www.umcd-dataset.net.
The paper is structured as follows. Section II reports some examples of possible scenarios in which the dataset can be used. Finally, Section III concludes the paper.
II Potential Scenarios
The UMCD dataset is designed to support different tasks for mosaicking and change detection purposes. Anyway, due to both the suitable length of the video sequences and the different entities contained in them, the sequences can be also adopted for different aims, e.g., object classification without using a reference mosaic. In this section, five scenarios that show the potential use of the dataset are presented. The dataset is built to allow the development of real-time and on-line algorithms, but this last aspect depends on the specific algorithm implementation. In the next sub-sections, the following five scenarios are shown: object detection, people search and rescue, people and vehicle classification, military camp monitoring, and urban area monitoring.
II-A Scenario 1: Object Detection
In the first scenario, the object detection task is reported (Figure 1). Small objects, such as packets, boxes, and bags can be used to host dangerous ordnances, including Improvised Explosive Devices (IED). Due to the size of these objects, a high spatial resolution is required. Some medium and large UAVs can be equipped with very high resolution cameras, however due to their telemetry (e.g., speed, high-altitude) these aerial vehicles could not be suitable to detect small objects. Moreover, it might be necessary to perform such an object detection task frequently over time (e.g., several time in an hour), thus making impossible the use of common UAVs.
II-B Scenario 2: People Search and Rescue
In the second scenario, the people search and rescue task is reported (Figure 2). Often, this type of tasks occur in unfriendly areas (e.g., post-earthquakes, post-avalanche). The small-scale UAVs are agile and fast devices, moreover they can be designed to have autonomous behaviours (e.g., avoid obstacles, research a specific target), thus making them the most suitable aerial vehicles to successfully pursue such duties.
II-C Scenario 3: People and Vehicle Classification
In the third scenario, the people and vehicle classification task is reported (Figure 3). In this type of tasks the spatial resolution plays a main role. In fact, as well known, the spatial resolution required to classify an object must be higher with respect to that required to detect it. For this reason, the use of small-scale UAVs whose telemetry can be adapted according to the specific situations must be considered an optimal solution. The classification tasks cover a wide range of practical applications in safety and security, some examples include the access monitoring to quarantine zones, the surveillance of critical areas (e.g., border areas), the detection of intruders in off-limit zones, and many others. Moreover, these tasks can be considered a mandatory prerequisite for several complex duties, such as target tracking, re-identification, and others.
II-D Scenario 4: Military Camp Monitoring
In the fourth scenario, the military camp monitoring task is reported (Figure 4). In this task, the main goal is to check if outside the walls (or protections) some objects are suddenly appeared. Due to both the variability of the possible small objects and the fast changes of the surrounding environment, in this case the mosaicking and change detection approach is without doubt the best solution. In this specific case, a continuous monitoring could be necessary and a turnover of more small-scale UAVs could be adopted.
II-E Scenario 5: Urban Area Monitoring
In the fifth, and last, scenario, the urban area monitoring task is reported. In several cases, restricted urban areas can be established for different reasons, including population control, looting monitoring, intrusion detection, and many others. These are other examples in which the feedback from a small-scale UAV to a human operator must be in real-time, thus promoting, once again, the use of these devices instead of common UAVs.
III Conclusions
In the last years, the use of small-scale UAVs is increased greatly. Unlike the common medium or large aerial vehicles, the small-scale UAVs are extremely versatile, quickly programmable and very agile. In particular, they are highly suitable to perform tasks at very low-altitude. Currently, public aerial video sequences to test mosaicking algorithms are acquired at very high-altitude, while public geo-referenced sequences acquired at low-altitude to test mosaicking and change detection algorithms are not available. In this paper, the UMCD dataset is presented. The purpose of the dataset is to fill the previously highlighted lack. The paper also introduces five scenarios that suggest possible use of the dataset.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] A. C. Watts, V. G. Ambrosia, and E. A. Hinkley, “Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use,” Remote Sensing , vol. 4, no. 6, pp. 1671–1692, 2012.
- 2[2] A. G. Korchenko and O. S. Illyash, “The generalized classification of unmanned air vehicles,” in Proceedings of the 2nd IEEE International Conference on Actual Problems of Unmanned Air Vehicles Developments (APUAVD) , 2013, pp. 28–34.
- 3[3] O. Araar and N. Aouf, “Visual servoing of a quadrotor uav for the tracking of linear structured infrastructures,” in IEEE International Conference on Systems, Man, and Cybernetics , 2013, pp. 3310–3315.
- 4[4] X. Meng, W. Wang, and B. Leong, “Skystitch: A cooperative multi-uav-based real-time video surveillance system with stitching,” in Proceedings of the 23rd ACM International Conference on Multimedia , 2015, pp. 261–270.
- 5[5] A. Price, J. Pyke, D. Ashiri, and T. Cornall, “Real time object detection for an unmanned aerial vehicle using an fpga based vision system,” in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) , 2006, pp. 2854–2859.
- 6[6] M. B. Bejiga, A. Zeggada, A. Nouffidj, and F. Melgani, “A convolutional neural network approach for assisting avalanche search and rescue operations with uav imagery,” Remote Sensing , vol. 9, no. 2, pp. 1–22, 2017.
- 7[7] J. Sun, B. Li, Y. Jiang, and C.-y. Wen, “A camera-based target detection and positioning uav system for search and rescue (sar) purposes,” Sensors , vol. 16, no. 11, pp. 1–24, 2016.
- 8[8] J. Qi, D. Song, H. Shang, N. Wang, C. Hua, C. Wu, X. Qi, and J. Han, “Search and rescue rotary-wing uav and its application to the lushan ms 7.0 earthquake,” Journal of Field Robotics , vol. 33, no. 3, pp. 290–321, 2016.