Finite-Time Stabilization of Longitudinal Control for Autonomous Vehicles via a Model-Free Approach
Philip Polack, Brigitte d'Andr\'ea-Novel, Michel Fliess, Arnaud de la, Fortelle, Lghani Menhour

TL;DR
This paper introduces a model-free control method for autonomous vehicle longitudinal control that ensures finite-time stability, improves comfort, and enhances robustness without relying on vehicle parameter knowledge.
Contribution
It proposes a novel model-free control approach with time-varying parameters to achieve finite-time stability in vehicle longitudinal control.
Findings
Reduced overshoots in control responses
Increased driving comfort
Improved robustness to time-delays
Abstract
This communication presents a longitudinal model-free control approach for computing the wheel torque command to be applied on a vehicle. This setting enables us to overcome the problem of unknown vehicle parameters for generating a suitable control law. An important parameter in this control setting is made time-varying for ensuring finite-time stability. Several convincing computer simulations are displayed and discussed. Overshoots become therefore smaller. The driving comfort is increased and the robustness to time-delays is improved.
Click any figure to enlarge with its caption.
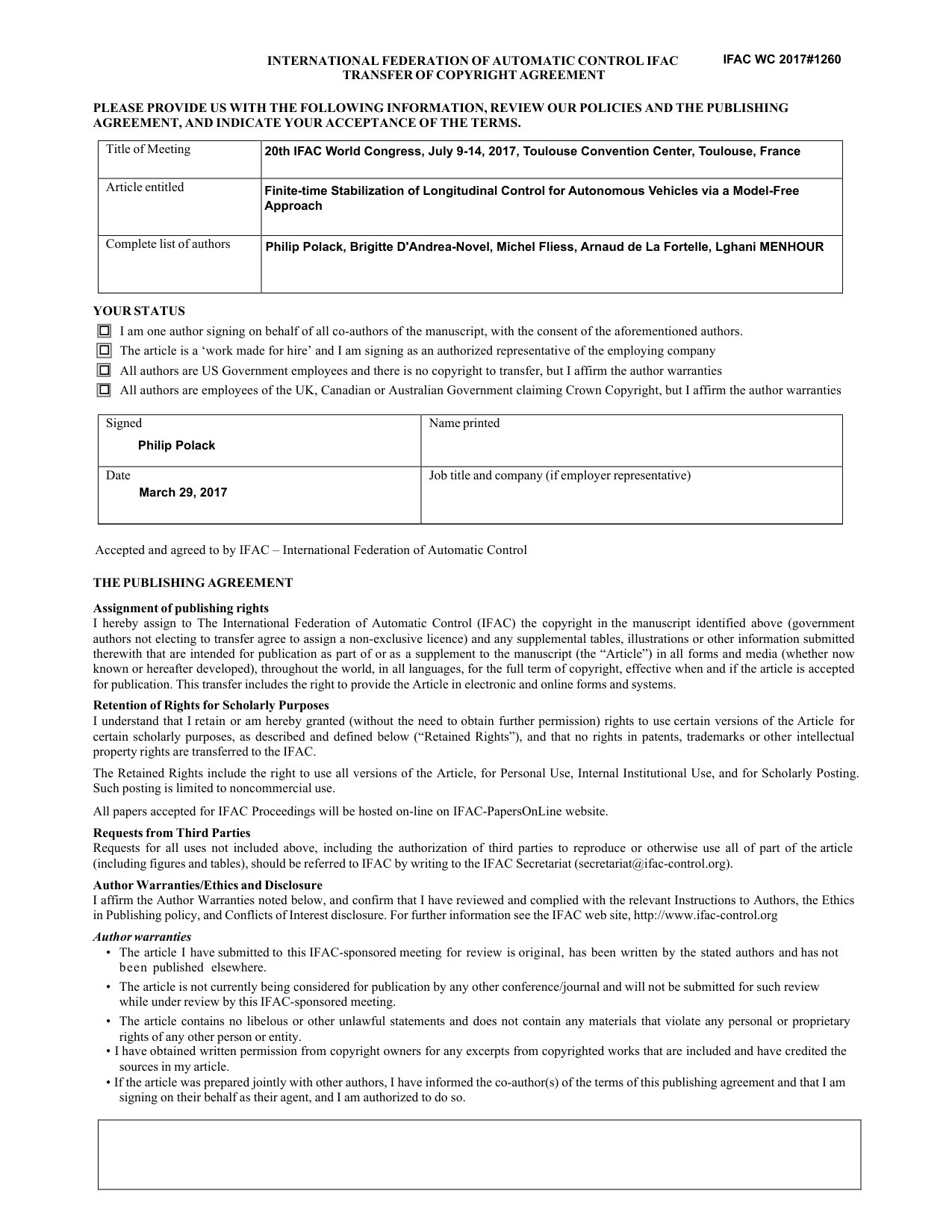 Figure 1
Figure 1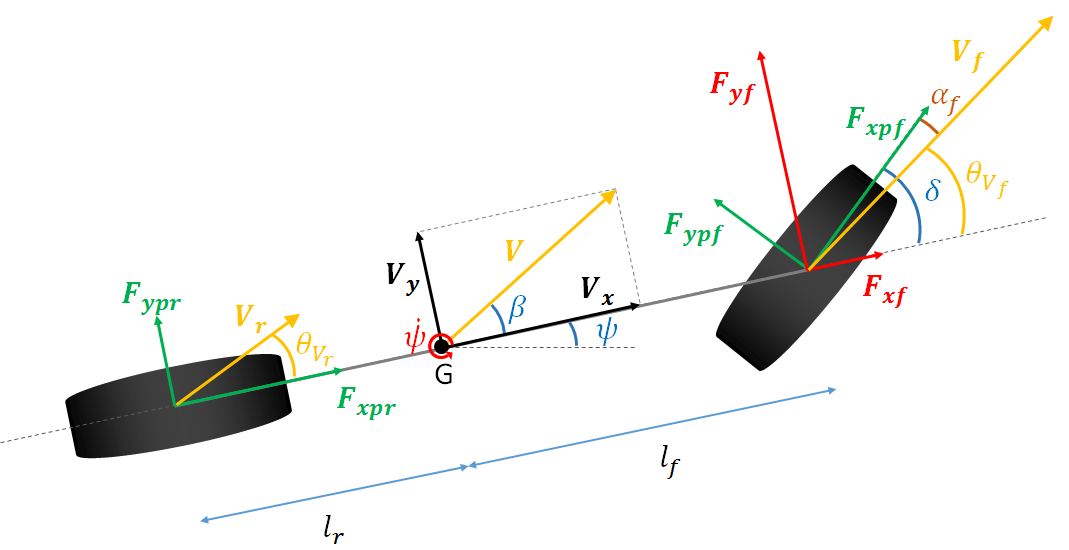 Figure 2
Figure 2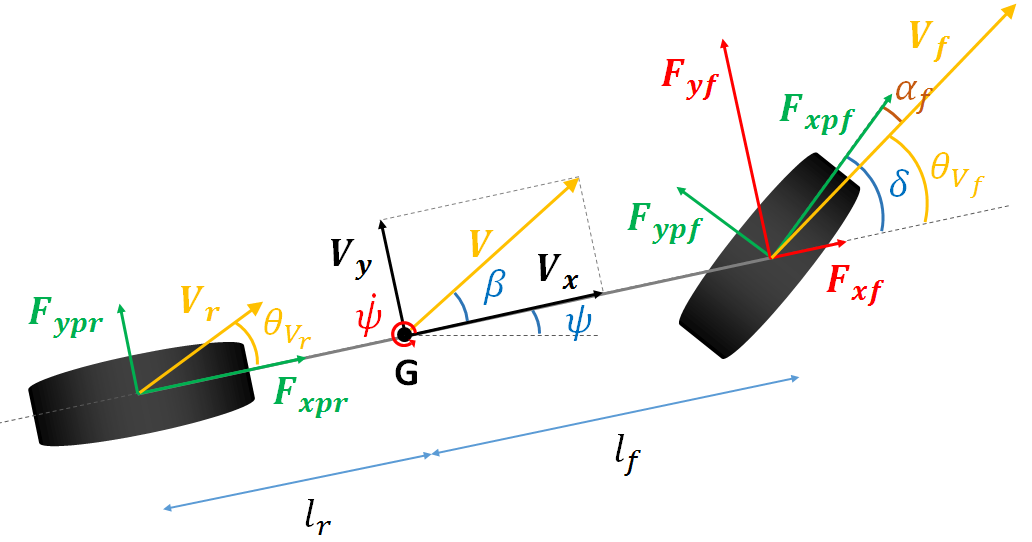 Figure 3
Figure 3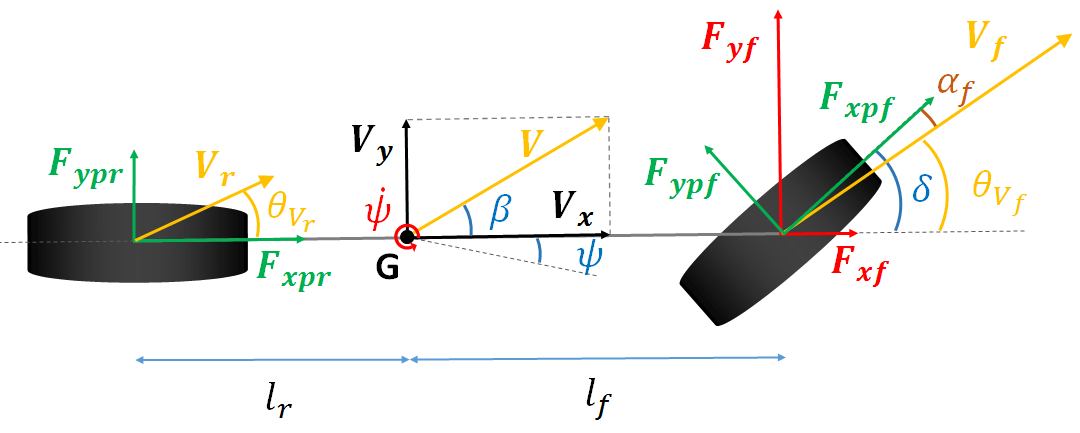 Figure 4
Figure 4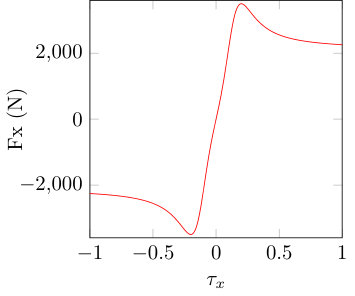 Figure 0
Figure 0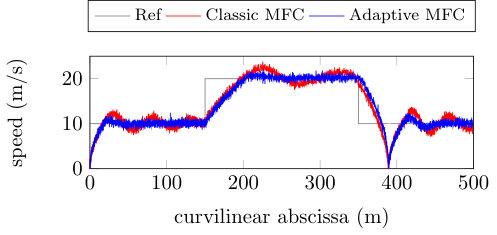 Figure 1
Figure 1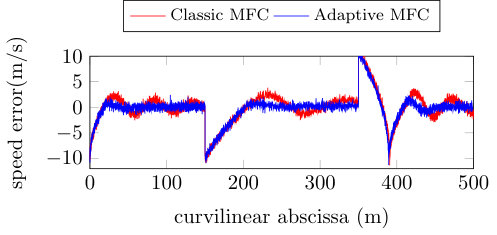 Figure 2
Figure 2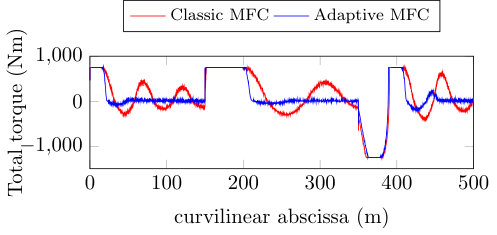 Figure 3
Figure 3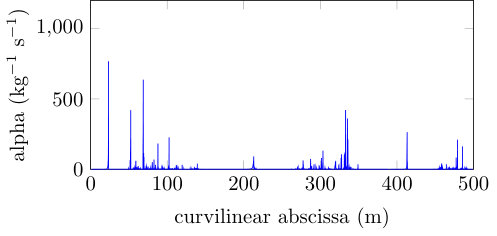 Figure 4
Figure 4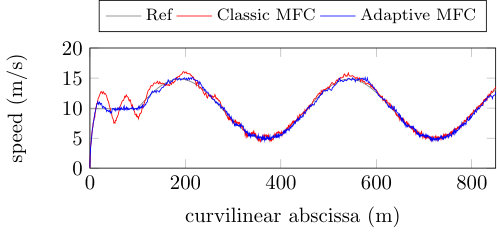 Figure 5
Figure 5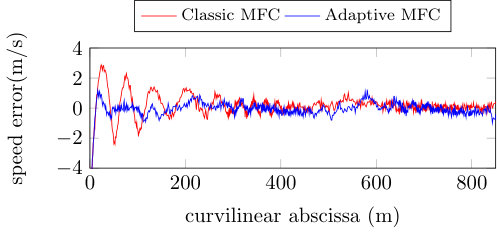 Figure 6
Figure 6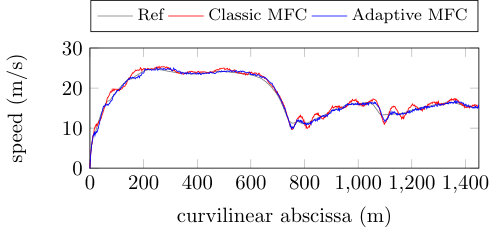 Figure 7
Figure 7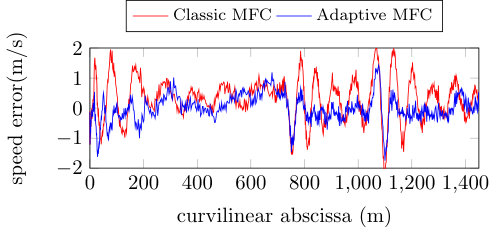 Figure 8
Figure 8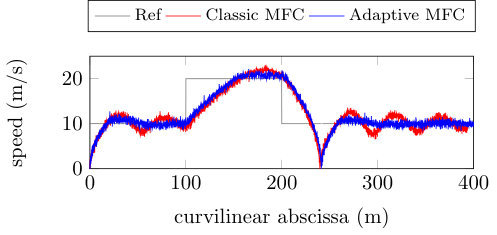 Figure 0
Figure 0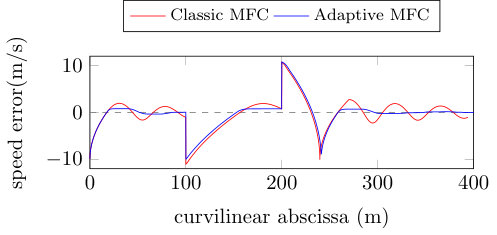 Figure 1
Figure 1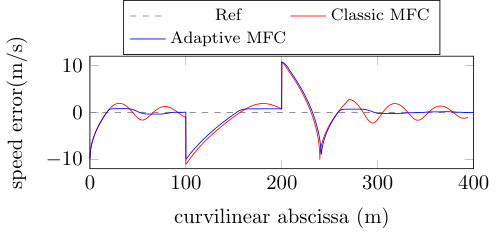 Figure 1
Figure 1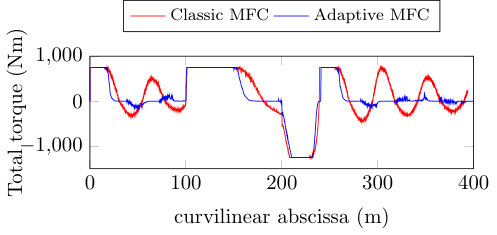 Figure 2
Figure 2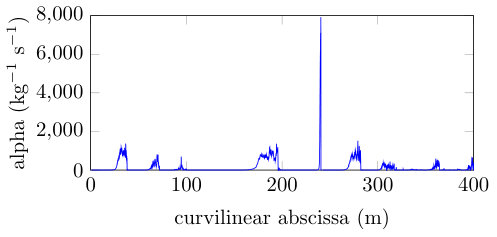 Figure 3
Figure 3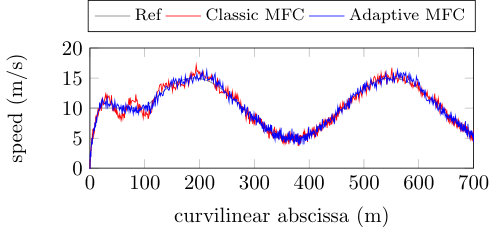 Figure 4
Figure 4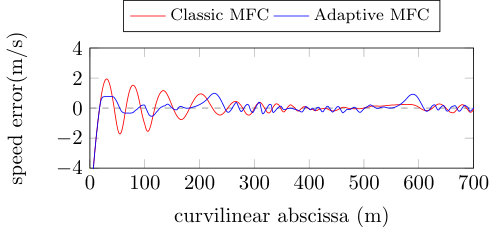 Figure 5
Figure 5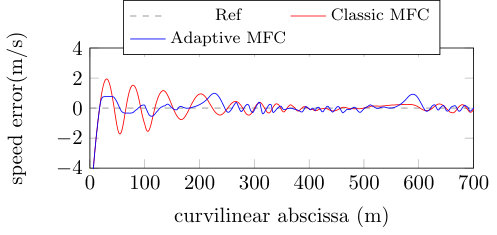 Figure 5
Figure 5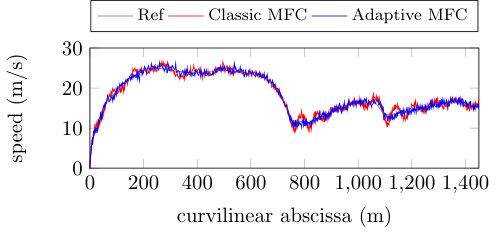 Figure 6
Figure 6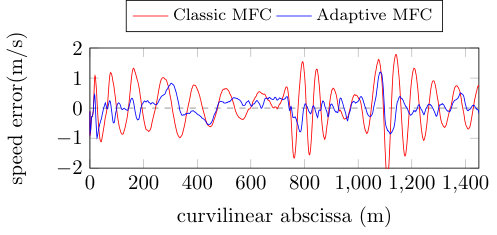 Figure 7
Figure 7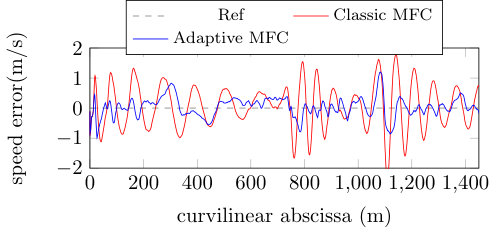 Figure 7
Figure 7| Symbols | Variables |
|---|---|
| vehicle mass [kg] | |
| , | distances from the center of gravity to the front and rear axles [m] |
| vertical inertia of the vehicle [kg.m-2] | |
| wheel inertia [kg.m-2] | |
| effective radius of the wheel [m] | |
| , | longitudinal and lateral speed [m/s] |
| , | yaw rate [rad/s] and yaw angle [rad] |
| wheel torque [Nm] | |
| , | motor and brake torque applied at wheel [Nm] |
| , | longitudinal forces in the vehicle coordinates of front and rear wheels [N] |
| , | lateral forces in the vehicle coordinates of front and rear wheels [N] |
| longitudinal forces applied on wheel in the tire coordinates [N] | |
| longitudinal slip ratio |
| MFC | Average | Std. dev. | Root mean square |
|---|---|---|---|
| adaptive | -0.02 | 0.35 | 0.35 |
| classic | -0.01 | 0.77 | 0.78 |
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Finite-Time Stabilization of Longitudinal Control for Autonomous Vehicles via a Model-Free Approach
Philip Polack
Brigitte d’Andréa-Novel
Michel Fliess
Arnaud de La Fortelle
Lghani Menhour
Centre de Robotique, Mines ParisTech, PSL Research University,
60 boulevard Saint-Michel, 75006 Paris, France
(e-mail: {philip.polack, brigitte.dandrea-novel,
arnaud.de_la_fortelle}@mines-paristech.fr)
LIX (CNRS, UMR 7161), École polytechnique, 91128 Palaiseau, France (e-mail: [email protected])
AL.I.E.N., 24-30 rue Lionnois, BP 60120, 54003 Nancy, France (e-mail: [email protected])
Centre de Recherche STIC, Université de Reims Champagne-Ardenne, IUT de Troyes,
9 rue du Québec, 10000 Troyes, France
(e-mail: [email protected])
Abstract
This communication presents a longitudinal model-free control approach for computing the wheel torque command to be applied on a vehicle. This setting enables us to overcome the problem of unknown vehicle parameters for generating a suitable control law. An important parameter in this control setting is made time-varying for ensuring finite-time stability. Several convincing computer simulations are displayed and discussed. Overshoots become therefore smaller. The driving comfort is increased and the robustness to time-delays is improved.
keywords:
Low-level longitudinal controller, model-free control, finite-time stability, intelligent controllers, autonomous vehicles
††thanks: This work was supported by the international Chair MINES ParisTech - Peugeot-Citroën - Safran - Valeo on ground vehicle automation and the ANR project 15 CE23 0007 (Project Finite4SoS).
1 Introduction
Research on autonomous vehicles has gained a growing interest since the successive DARPA challenges in 2004, 2005 and 2007. They are expected on the one hand to increase the road safety by taking the human out of the driving loop, and on the other hand to improve the efficiency of road transportation.
Among the robotic fields underlying in an autonomous vehicle, the low-level control is in charge of generating throttle/brake and steering commands of the vehicle. The input of a low-level controller can be either the output of a motion planner, meaning a list of waypoints to follow, or the output of a higher-level controller, for example a speed reference and distance to the preceding vehicle. This work presents a longitudinal low-level controller where a reference target speed is given. It can be coupled with a regular motion planner such as a Rapidly-exploring Random Tree () (Kuwata et al. (2008)) or an algorithm (Dolgov et al. (2008)) (see for example Katrakazas et al. (2015) for a full review on motion planning techniques), or a High-Level controller such as an Adapting Cruise Control (see Martinez and Canudas-de wit (2007), Rajamani (2012)) or a Stop-&-Go system (Villagra et al. (2009)).
Model-based low-level controllers have been widely studied in the literature. A distinction is made between kinematic and dynamic controllers. In the first case, we can mention Samson (1995), Rajamani (2012), or the pure-pursuit controller introduced in Coulter (1992), and their variants. They are very performant but limited to low speed applications. They assume that the tire do not slip and skid. These assumptions are rather restrictive in the perspective of future fully automated autonomous vehicles running at high speed in an uncertain environment.
Dynamic models are derived from the equations of the vehicle dynamics and those of the tires. These equations are highly nonlinear. Therefore, the generation of a control command is rather complicated. Linearisation assumptions, Linear Parameter Varying (LPV) system and flatness-based control techniques (Fliess et al. (1995)) have shown good results for regular driving situations but they suffer from a lack of robustness with regards to unknown dynamics such as the non-linear tire efforts or load transfers. In Menhour et al. (2013a), their non-robustness to a change of parameter value such as mass or cornering stiffness is shown. Lastly, they are also sensitive to disturbances such as slopes, road-bank angle, aerodynamic forces or tire-road adhesion.
To bypass the nonlinearities of the dynamic equations, Model Predictive Control (MPC) is used in Camacho and Bordons (1999), Falcone et al. (2007). The idea is to intertwine the planning and control parts by considering the dynamic equations as a constraint. The control input to apply is obtained through an optimisation planning problem.
To tackle the problems of non-linearity and weak-robustness to parameter variation, low-level controllers based on model-free approach are popular. The well-known classic PID have been widely used (see Åstrom and Hägglund (1995)). Although this approach can be satisfying, no proof of stability can be obtained. A new model-free approach coupled with an “intelligent” controller has been therefore introduced in Fliess and Join (2013). It has been applied successfully to vehicle control in Menhour et al. (2013b), Menhour et al. (2015) and d’Andréa Novel et al. (2016). This method is very promising as it guarantees local asymptotic stability without any prior knowledge of our system. It captures the vehicle dynamics through online-estimation. The most rapid and violent movements which are considered here lead us to employ a recent important advance on a time-varying approach due to Doublet et al. (2016). This improvement leads moreover to finite-time stabilization and allows to tackle severe speed discontinuities little covered in existing literature (e.g. step function).
This communication is organized as following. Section 2 presents the model-free approach defined by Fliess and Join (2013). Section 3 exploits the approach by Doublet et al. (2016) in order to obtain a finite-time stability. The 7 Degrees of Freedom (DoF) simulation model used to test our controller is presented in Section 4. Section 5 presents the results obtained and compares them to the classic model-free control approach without adaptation. Some concluding remarks and future investigations are presented in Section 6.
2 Longitudinal Model-Free Control
2.1 Short review on model-free control
The model-free control approach presented here was introduced by Fliess and Join (2013). It has been applied to the automation of vehicle in several papers such as Menhour et al. (2013b), Menhour et al. (2015) and d’Andréa Novel et al. (2016).
The longitudinal dynamics of the vehicle is approximated by an ultra-local differential relation of order 1 valid only on a very short time period ( ms):
[TABLE]
where is the control output, represents both the unmodelled and the neglected dynamics, is the control input, and is a parameter chosen by the practitioner such that has the same order of magnitude as . The model-free approach has two main assets:
- •
No prior knowledge of vehicle parameters and tire characteristics is needed (for ex. , , - see notation in Table 1),
- •
The whole dynamics of the car (even the unmodelled one) and the external disturbances such as wind, slope, road-bank are taken into account.
In the case of a longitudinal control, we choose the longitudinal speed as control output and the sum of torque applied at each wheel as control input , such as in Menhour et al. (2015). A system of first order was chosen, based on the dynamic analytical model of a vehicle:
[TABLE]
Remark 2.1
The parameter is nonnegative as the longitudinal speed of a vehicle is an increasing function of the applied torque on the wheels.
2.2 Estimation of the unmodelled and neglected dynamics
The unmodeled and neglected dynamics at time t, , can be estimated using directly the last applied control input and the last observed output :
[TABLE]
However, the raw signals such as speeds are often rather noisy. A filter has been derived from Fliess and Sira-Ramírez (2003). Based on operational calculus (see, e.g., Yosida (1984)), it is used in order to estimate :
First, we transform Equation (1) in the operational domain:
[TABLE]
where is constant. Getting rid of the initial condition by multiplying by on both sides, multiplying then by in order to achieve noise attenuation yields:
[TABLE]
From the above algebraic calculations we get
[TABLE]
There we exploit the connection between and the multiplication by in the time domain. Going from Equation (6) to a digital filter is done using the last values of and , where is the sampling time of the controller, and the filtering window.
2.3 Intelligent Controller
Lastly, the next control input to apply at time t is computed from the estimation , the reference longitudinal speed and the error on longitudinal speed :
[TABLE]
It yields
[TABLE]
Choosing is fine if is “small”, i.e., if the estimate is “good”.
3 Adaptive model-free control
The fast and violent movements which are considered here lead us to introduce an adaptive model-free control setting, where, according to Doublet et al. (2016), the coefficient in Equation (1) becomes a piecewise continuous function , updated at each time step.
Remark 3.1
The wording “adaptive model-free control” is encountered elsewhere, but with a different meaning (see, e.g., Battistelli et al. (2013); Hou and Jin (2016); Roman et al. (2016), and the references therein).
From Equation (7), the error may be expressed in the following way:
[TABLE]
Choose such that in order to achieve finite-time stability:
[TABLE]
In order to avoid singularities and nonpositive values of , set
[TABLE]
where is selected by the practitioner manually via trial and error, is the sign function (with ) and .
Remark 3.2
The filter in Equation (6) remains valid on if we consider the following system: where . This leads to the constant case of Equation (1), with . More precisely, Algorithm (1) is used.
Algorithm 1
*At each time step :
filter given by (6)
iP given by (7)
given by (11)
Remark 3.1
Let us point out that Equation (8) remains valid with varying in Equation (7).
4 Model for Simulations
In our simulations, several assumptions are made:
- •
We neglect the external disturbances such as aerodynamic forces, road-bank angle and slope.
- •
The dynamics of the car engine is not taken into account.
The notations used are summarized in Table 1 and Figure 1.
4.1 7 DoF vehicle model
A 7 Degrees of Freedom (DoF) vehicle model is used for designing and testing purposes. This is a suitable model of a car moving on a plane (vertical effects are not taken into account). The forces that the road applies on each tire is modelled through Pacejka’s “Magic Tire Formula” (see Pacejka and Besselink (1997)).
4.1.1 Vehicle dynamics
The 7 DoF of the vehicle model used for simulation are: longitudinal speed , lateral speed , yaw speed and the rotating speed of each wheel .
The equations of the car-body moving on a plane can be written (see table 1 for notation):
[TABLE]
The dynamic of each wheel can be written:
[TABLE]
4.1.2 Pacejka tire dynamics
The tire model used in our simulation is given by Pacejka’s formula in Pacejka and Besselink (1997). In its easiest form, the longitudinal forces depend only on the tire longitudinal slip ratio :
[TABLE]
The expression of the longitudinal slip ratio depends on the velocities of the vehicle and of the tire:
- •
during propulsion:
- •
during braking:
In the case where the longitudinal speed and the rotation of the tire are in the opposite direction, the value of is saturated to .
is called the stiffness factor, the shape factor, the peak value of and the curvature factor. These constants can be computed from the experimental curve in the following manner:
is the peak value of ; 2. 2.
where is the asymptotic value of ; 3. 3.
is computed from the initial slope egal to ; 4. 4.
where is the value such that .
In reality, they are not real constants but depend on the friction coefficient and the normal reaction of the road on the tire.
A similar model is used for lateral forces in the tire coordinates with regards to slip angle.
4.1.3 Adding Noise
Our simulator gives us the “ground truth” about the states of the vehicle. Therefore, in order to make our simulations more realistic and test the robustness of our control law, we added a -6dB white Gaussian noise to the simulated longitudinal speed . Thus, the speed signal is closer to the one measured or estimated using sensors on real vehicles.
5 Results
In order to test our newly introduced adaptive longitudinal controller, three tests were performed with different speed reference inputs: a step function reference speed, a sinusoidal function reference speed and a real driver speed input performed on a track. To the best of our knowledge, such challenging tests with severe speed discontinuities have not been frequently studied in the literature. A comparison is made between the classic model-free control (Classic MFC) presented in Menhour et al. (2015) and the proposed adaptive model-free control approach (Adaptive MFC), using for the constant value of the classic approach.
5.1 Response to a step function
In this case, the car is moving on a straight line and the reference speed is a step function of position. This is a challenging speed to follow for a longitudinal controller due to the non regularity of the speed reference.
The results obtained with a tuned classic model-free control approach and an adaptive model-free control approach are shown on Fig. 2 and Fig. 3. In the classic approach, we observe that the system is asymptotically stable but oscillatory and the overshoot is rather important: for the first step, we have about 19.5% overshoot and for the second around 9.5%. In comparison, our adaptive model-free control approach shows better results as the system is less oscillatory and the overshoot is greatly reduced: for the first step in target speed, the overshoot is around 8% and for the second, around 3.9%. Therefore, our adaptive model-free control approach is more robust to jumps in target speed compared to existing model-free approaches. Moreover, the system stabilises itself in finite-time, between 50m and 100m (see Fig. 3), ensuring a smoother driving. This is confirmed by the control input (see Fig. 4) that stabilizes itself quickly around the value [math].
Fig. 5 shows the evolution of with respect to the curvilinear abscissa. We observe that its value increases strongly when the speed of the vehicle exceeds the target one: this implies a reduction of the torque input, thus reducing the overshooting and avoiding oscillations. Please note that the value of is most of the time, and not [math].
5.2 Response to a sinusoidal function
In this case, the car is moving on a straight line and the reference speed is a sinusoidal function of position. This time, the target speed is smooth but keeps on varying. Therefore, the fast convergence of the longitudinal error is important.
We observe on Fig. 6 and Fig. 7 that the classic model-free control and our adaptive longitudinal control give approximately the same results. However, the convergence of our system is quicker on the first oscillation and the overshooting is almost non-existing.
5.3 Response to reference speed inputs acquired from real driver data
Lastly, we used as reference speed input some driver data recorded on a real track to compare the two model-free approaches. The recorded data were the state of the vehicle and the time . The positions of the waypoints were thus obtained by reconstruction using the following equations:
[TABLE]
where and were filtered from the raw data (average over 100 points) and is the curvilinear abscissa reference of the waypoints.
Comparing both models in Fig. 8 and Fig. 9, we observe that the adaptive model-free approach is more stable: the results are less oscillatory and give smaller longitudinal errors. Table 2 shows in fact that the controller is able to follow the reference target speed with a better precision (smaller root mean square error) and with less oscillations (smaller standard deviation).
5.4 Robustness to delays
The results presented in Doublet et al. (2016) suggest that the adaptive model-free approach presented in this paper is more robust to delays. This is an important characteristic of our system as delays could arise from the filter presented in Equation (6) and the car engine dynamics. Therefore, we ran simulations with a ms time delay on the control input for both the classic and adaptive MFC on the real driver data. The results showed that adapting gives better results: the root mean square of the error was only m/s for the adaptive MFC (quite similar to the classic MFC without delay) and m/s for the classic MFC.
6 Conclusion
We have introduced an adaptive longitudinal model-free control. The online-line adaptation of the parameter enables to stabilize the system in finite time and to smooth the control input. Adaptation happens when the sign of the longitudinal error changes. This leads to reduce the value of the control input as well as the time response of the closed-loop system. Therefore the comfort of the driver is improved, especially when the reference speed changes abruptly. It also drastically reduces the control input overshoot which is important for respecting speed limit and maintain safety. Lastly, the adaptive model-free control is more robust to time delays arising in the execution of the control input. These delays are very likely to exist on real vehicles due to the car engine dynamics. In a future work, we will extend the approach to the lateral control of the vehicle.
{ack}
The authors would like to thank warmly Cédric Join and Maxime Doublet for useful discussions concerning the paper Doublet et al. (2016), and the adaptation of the control parameter.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Åstrom and Hägglund (1995) Åstrom, K. and Hägglund, T. (1995). PID Controllers: Theory, Design, and Tuning . Instrument Society of America: Research Triangle Park.
- 2Battistelli et al. (2013) Battistelli, G., Hespanha, J.P., Mosca, E., and Tesi, P. (2013). Model-free adaptive switching control of time-varying plants. IEEE Trans. on Automatic Control , 58(5), 1208–1220.
- 3Camacho and Bordons (1999) Camacho, E.F. and Bordons, C. (1999). Model Predictive Control . Springer.
- 4Coulter (1992) Coulter, R.C. (1992). Implementation of the Pure Pursuit Path Tracking Algorithm. Technical report, Carnegie Mellon University, Pittsburg.
- 5d’Andréa Novel et al. (2016) d’Andréa Novel, B., Menhour, L., Fliess, M., and Mounier, H. (2016). Some remarks on wheeled autonomous vehicles and the evolution of their control design. In 9th IFAC Symp. on Intelligent Autonomous Vehicles , 15, 199–204. Leipzig, Germany.
- 6Dolgov et al. (2008) Dolgov, D., Thrun, S., Montemerlo, M., and Diebel, J. (2008). Practical search techniques in path planning for autonomous driving. In 1st Int. Symp. on Search Techniques in Artificial Intelligence and Robotics . Chicago, USA.
- 7Doublet et al. (2016) Doublet, M., Join, C., and Hamelin, F. (2016). Model-free control for unknown delayed systems. In 3rd Conf. on Control and Fault-Tolerant Systems . Barcelona, Spain.
- 8Falcone et al. (2007) Falcone, P., Borrelli, F., Asgari, J., Tseng, H.E., and Hrovat, D. (2007). Predictive Active Steering Control for Autonomous Vehicle Systems. IEEE Trans. on Control Systems Technology , 15(3), 566–580.