Towards Teleoperation with Human-like Dynamics: Human Use of Elastic Tools
Manuel Aiple, Andr\'e Schiele

TL;DR
This study investigates how humans intuitively use elastic tools in hammering tasks and explores implications for designing teleoperation systems with elastic actuators to achieve human-like dynamic movements.
Contribution
It provides experimental insights into human interaction with elastic tools, informing the design of teleoperator systems with elastic elements for intuitive control.
Findings
Humans efficiently learned to use elastic tools after few trials.
Optimal stiffness range for performance was identified between 2.3 and 4.1 Nm/rad.
Participants converged to similar solutions regardless of stiffness variations.
Abstract
Variable stiffness actuators undergo lower peak force in contacts compared to their rigid counterparts, and are thus safer for human-robot interaction. Furthermore, they can store energy in their elastic element and can release it later to achieve human-like dynamic movements. However, it is not clear how to integrate them in teleoperator systems so that they can be controlled intuitively by a human. We performed an experiment to study human use of elastic tools to determine how a teleoperator system with an elastic slave would need to be designed. For this, we had 13 untrained participants hammer with an elastic tool under different stiffness conditions, asking them to try to find the best timing for a backward-forward swing motion in order to achieve the strongest impact. We found that the participants generally executed the task efficiently after a few trials and they converged…
Click any figure to enlarge with its caption.
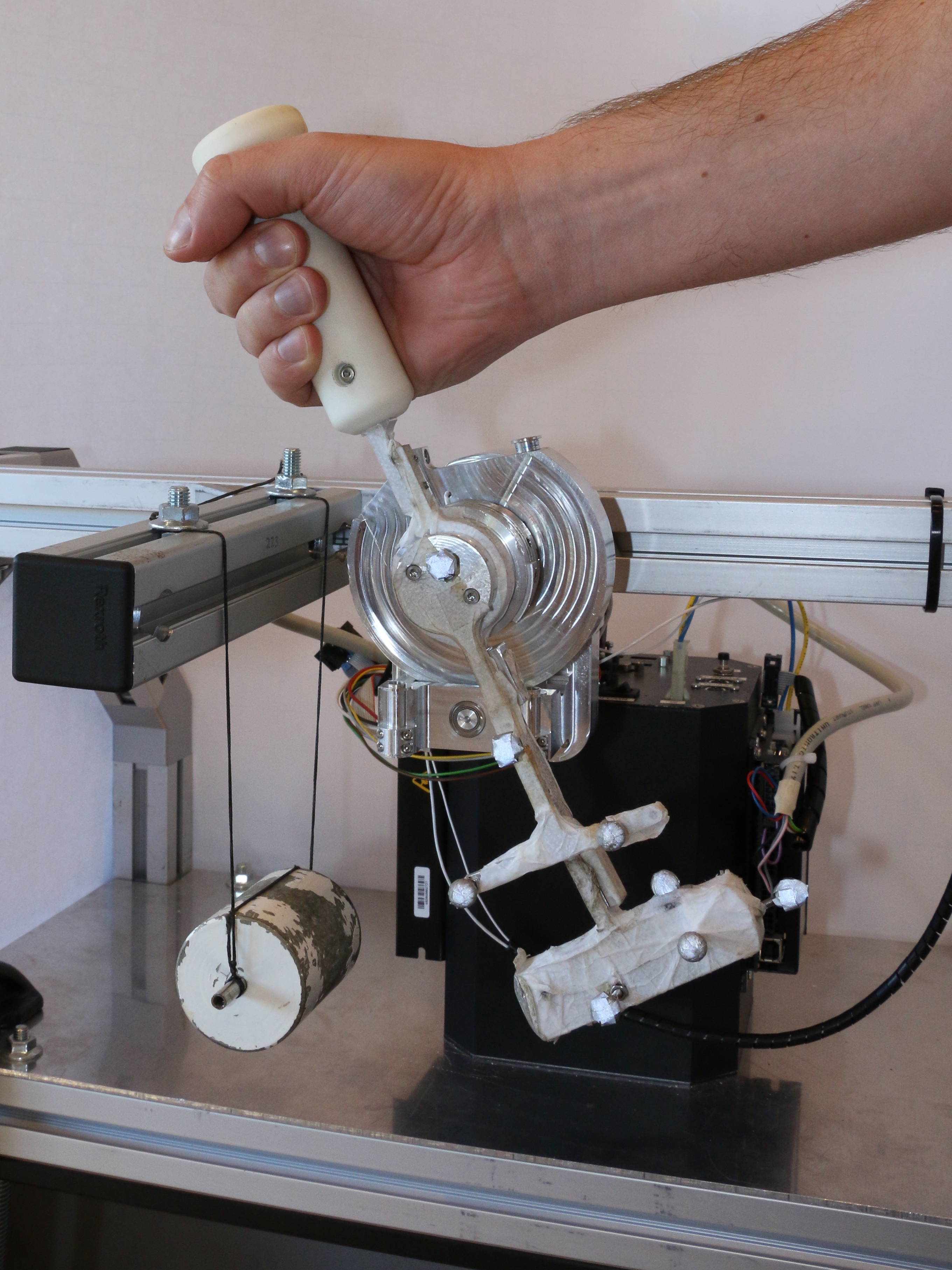 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.