How AD Can Help Solve Differential-Algebraic Equations
John D. Pryce, Nedialko S. Nedialkov, Guangning Tan, Xiao Li

TL;DR
This paper demonstrates how algorithmic differentiation can efficiently solve differential-algebraic equations, improving index reduction and enabling direct solutions from Lagrangian formulations with practical examples.
Contribution
It introduces the use of pure algorithmic differentiation for index reduction and direct solution of DAE systems, with theoretical and practical insights.
Findings
Efficient index reduction via algorithmic differentiation.
Successful application to complex mechanical systems.
Demonstrated long-term integration of planetary models.
Abstract
A characteristic feature of differential-algebraic equations is that one needs to find derivatives of some of their equations with respect to time, as part of so called index reduction or regularisation, to prepare them for numerical solution. This is often done with the help of a computer algebra system. We show in two significant cases that it can be done efficiently by pure algorithmic differentiation. The first is the Dummy Derivatives method, here we give a mainly theoretical description, with tutorial examples. The second is the solution of a mechanical system directly from its Lagrangian formulation. Here we outline the theory and show several non-trivial examples of using the "Lagrangian facility" of the Nedialkov-Pryce initial-value solver DAETS, namely: a spring-mass-multipendulum system, a prescribed-trajectory control problem, and long-time integration of a model of the…
Click any figure to enlarge with its caption.
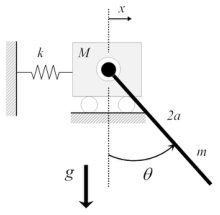 Figure 1
Figure 1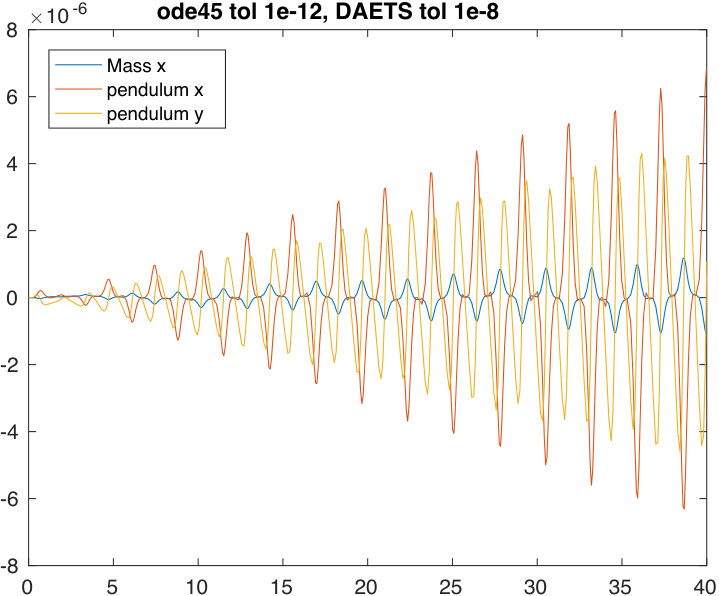 Figure 2
Figure 2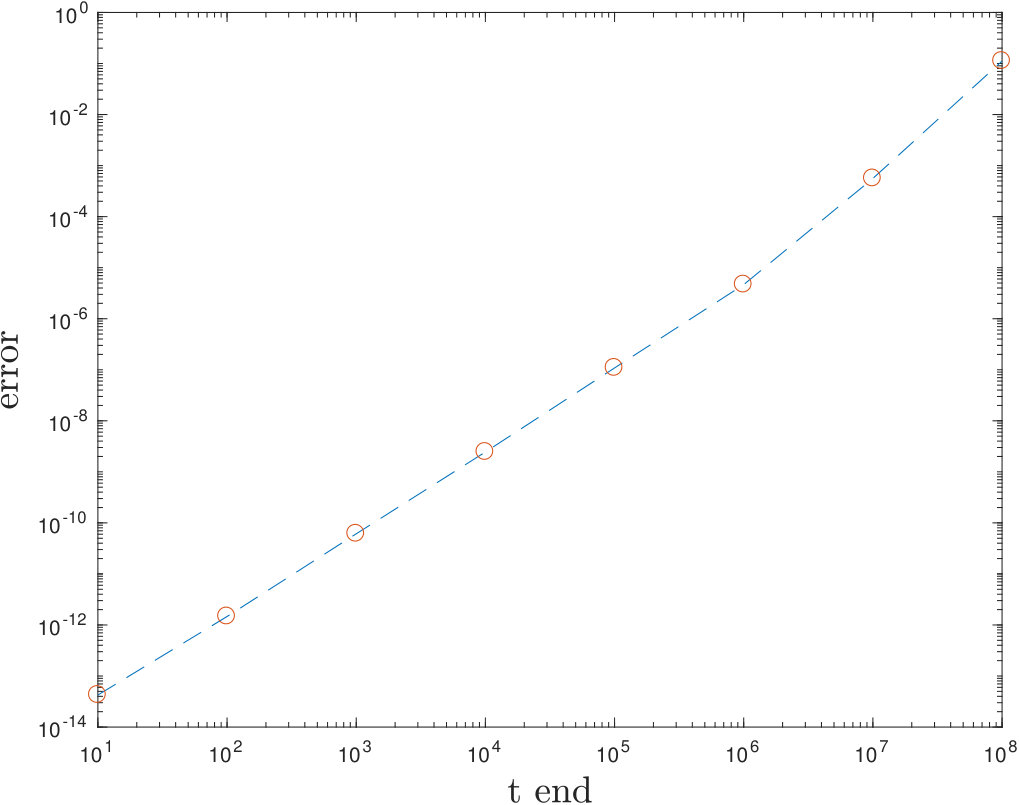 Figure 3
Figure 3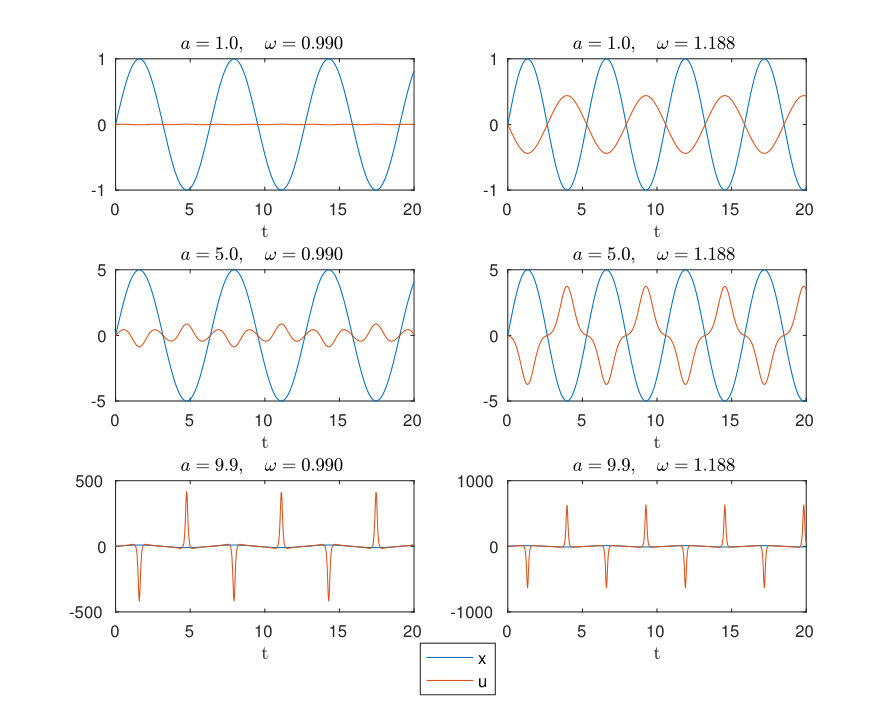 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsNumerical methods for differential equations · Modeling and Simulation Systems · Control and Stability of Dynamical Systems