On the optimal control of non-expansive or passive systems
Timothy H. Hughes

TL;DR
This paper extends the positive-real and bounded-real lemmas to uncontrollable passive and non-expansive systems, providing new methods to optimize energy extraction and characterizing solution sets without controllability assumptions.
Contribution
It introduces a framework for solving optimal control problems for uncontrollable passive and non-expansive systems, including new conditions and complete solution characterizations.
Findings
Optimal energy extraction from uncontrollable passive systems using state feedback.
Complete characterization of solutions to linear matrix inequalities in the lemmas.
Necessary and sufficient conditions for non-expansiveness in uncontrollable systems.
Abstract
The positive-real and bounded-real lemmas solve two important linear-quadratic optimal control problems for passive and non-expansive systems, respectively. The lemmas assume controllability, yet a passive or non-expansive system can be uncontrollable. In this paper, we solve these optimal control problems without making any assumptions. In particular, we show how to extract the greatest possible amount of energy from a passive but not necessarily controllable system (e.g., a passive electric circuit) using state feedback. A complete characterisation of the set of solutions to the linear matrix inequalities in the positive-real and bounded-real lemmas is also obtained. In addition, we obtain necessary and sufficient conditions for a system to be non-expansive that augment the bounded-real condition with new conditions relevant to uncontrollable systems.
Click any figure to enlarge with its caption.
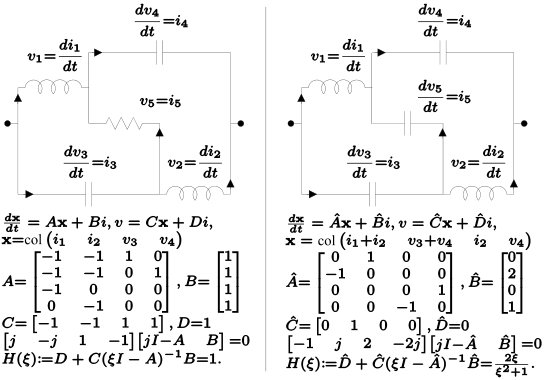 Figure 1
Figure 1 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsStability and Control of Uncertain Systems · Control and Stability of Dynamical Systems · Advanced Control Systems Optimization