Dynamic transition from $\alpha$-helices to $\beta$-sheets in polypeptide superhelices
Kirill A. Minin, Artem Zhmurov, Kenneth A. Marx, Prashant K. Purohit,, Valeri Barsegov

TL;DR
This study investigates the mechanical behavior of protein superhelices under force, revealing a transition from alpha-helices to beta-sheets that influences their deformation and can inform the design of new biomaterials.
Contribution
The paper introduces a theoretical model based on phase transition principles to describe the mechanical and kinetic properties of protein superhelices under non-equilibrium conditions.
Findings
All superhelices exhibit elastic, plastic, and inelastic regimes under stretch.
A dynamic alpha-to-beta transition marks the onset of plastic deformation.
Scaling laws enable rational design of materials with specific mechanical properties.
Abstract
We carried out dynamic force manipulations on a variety of superhelical protein fragments from myosin, chemotaxis receptor, vimentin, fibrin, and phenylalanine zippers that vary in size and topology of their -helical packing. When stretched along the superhelical axis, all superhelices show elastic, plastic, and inelastic elongation regimes, and undergo a dynamic transition from the -helices to the -sheets, which marks the onset of plastic deformation. Using Abeyaratne-Knowles formulation of phase transitions, we developed a theory to model mechanical and kinetic properties of protein superhelices under mechanical non-equilibrium conditions and to map their energy landscapes. The theory was validated by comparing the simulated and theoretical force-strain spectra. Scaling laws for the elastic force and the force for -to- transition to…
Click any figure to enlarge with its caption.
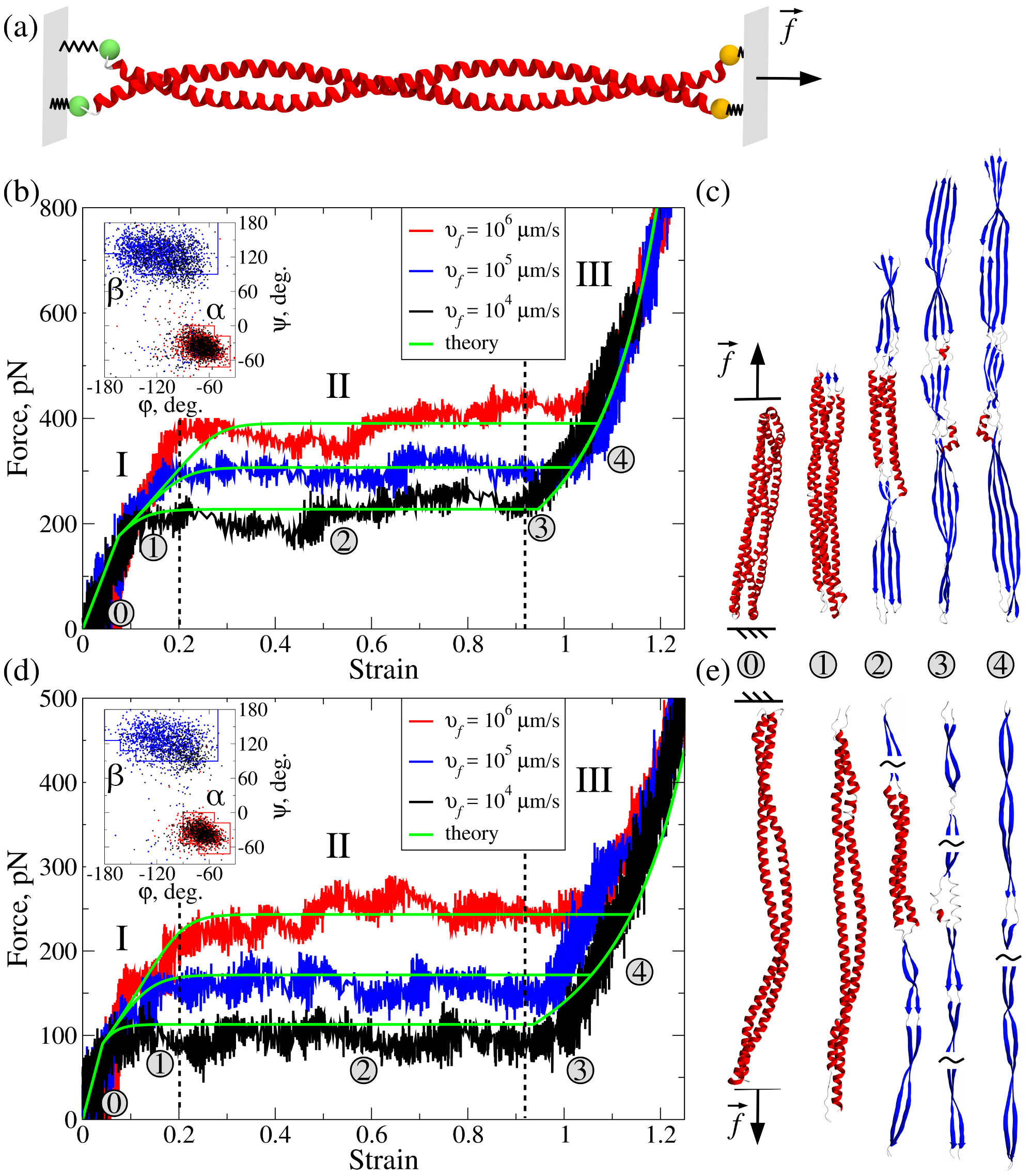 Figure 1
Figure 1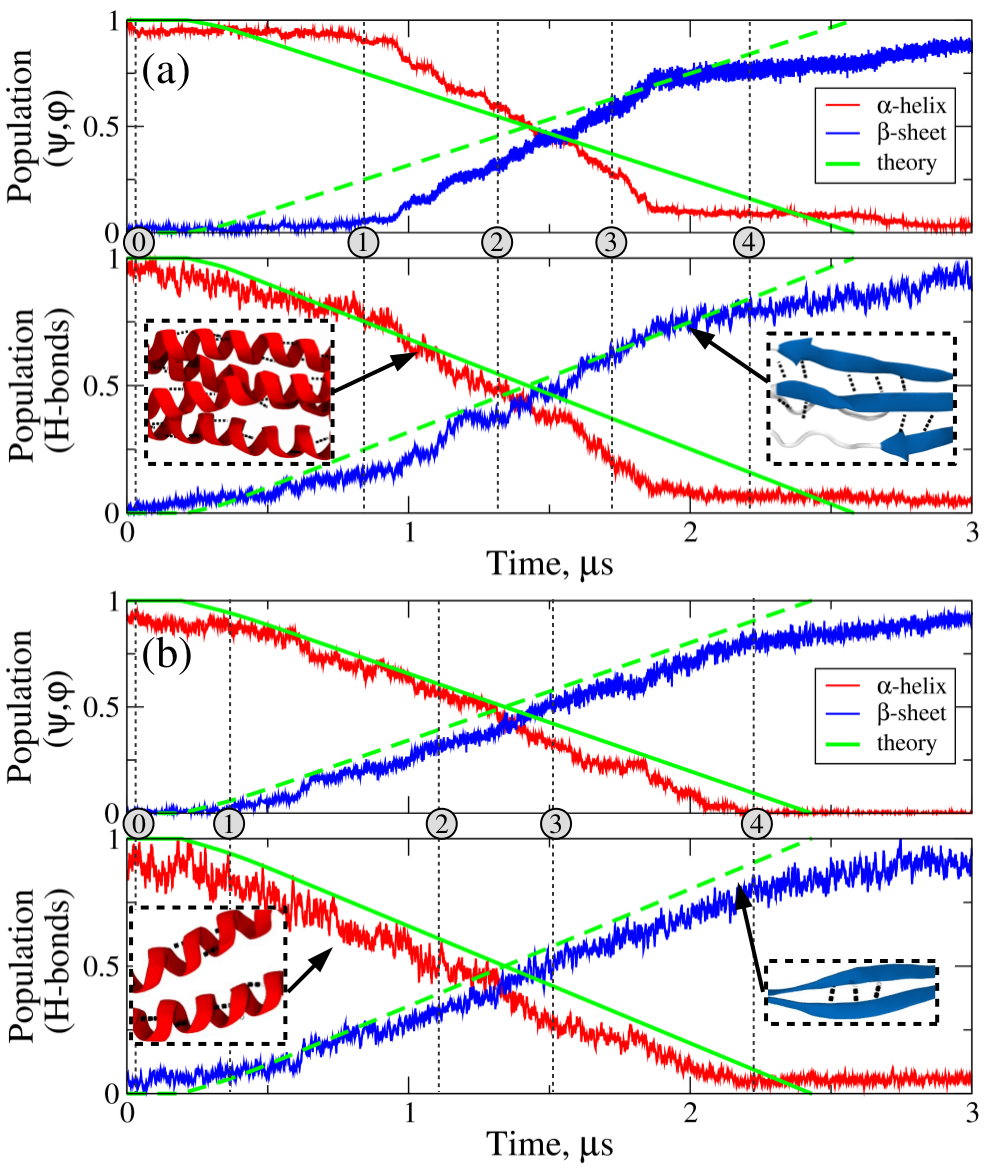 Figure 2
Figure 2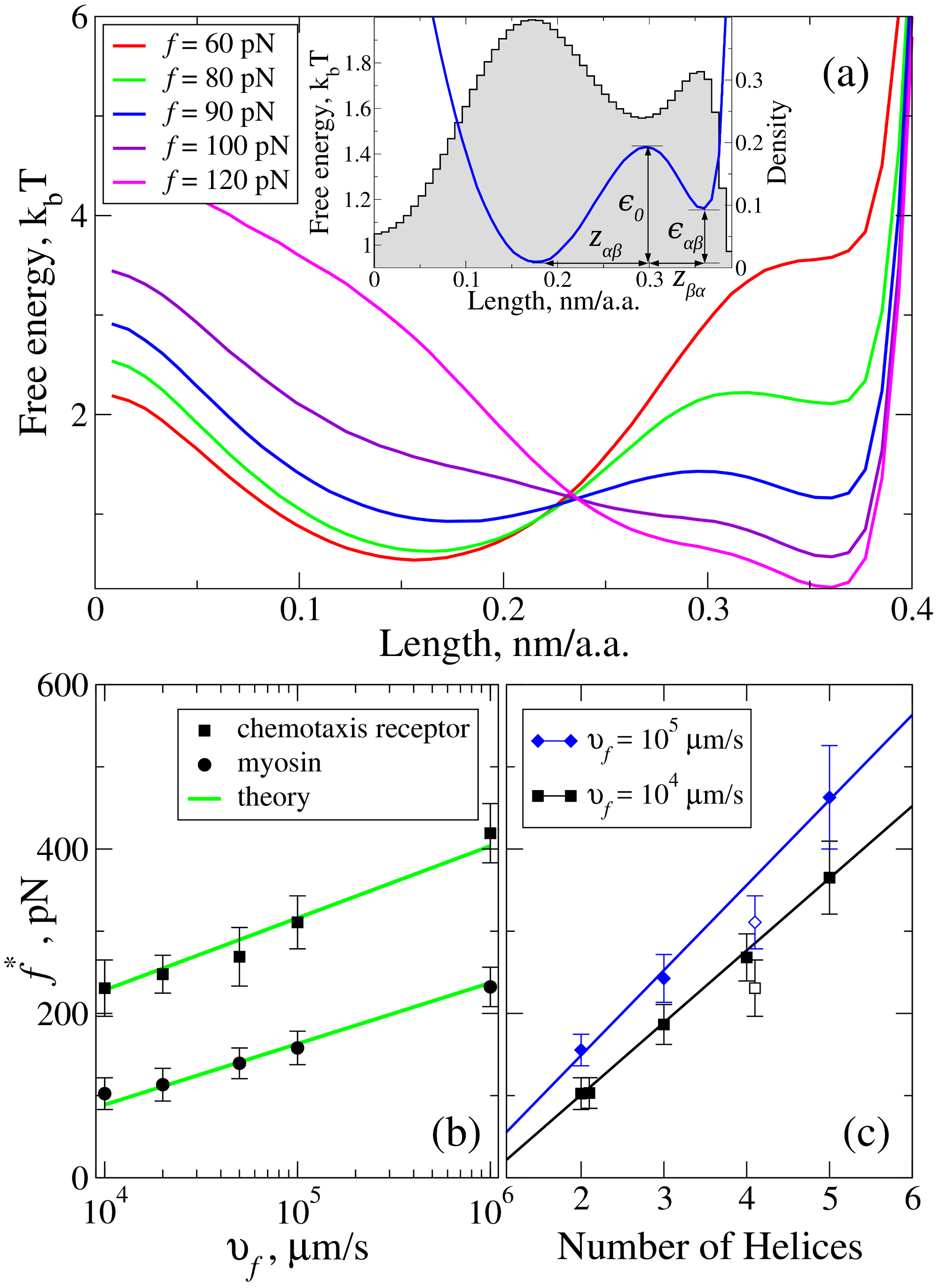 Figure 3
Figure 3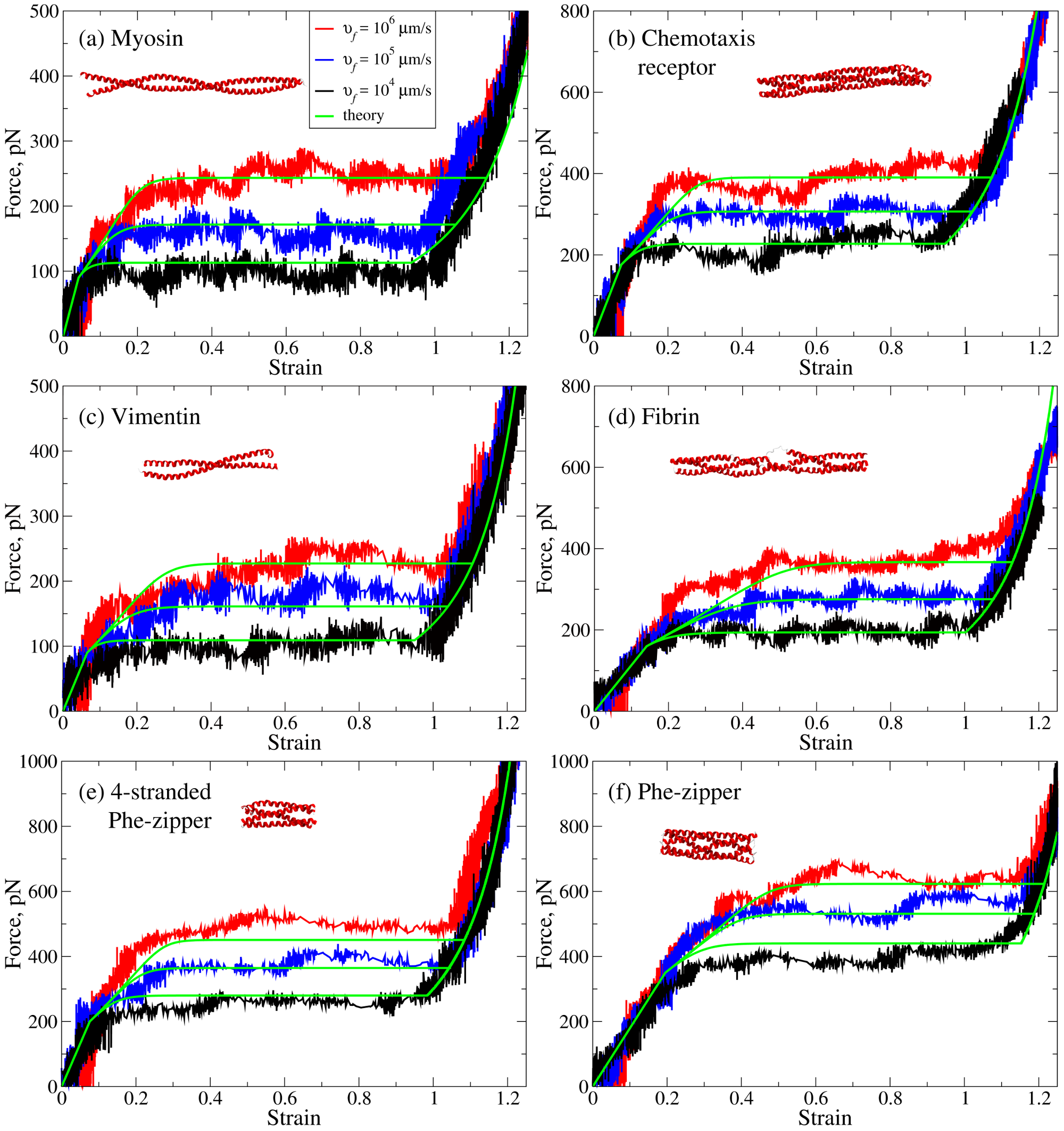 Figure 4
Figure 4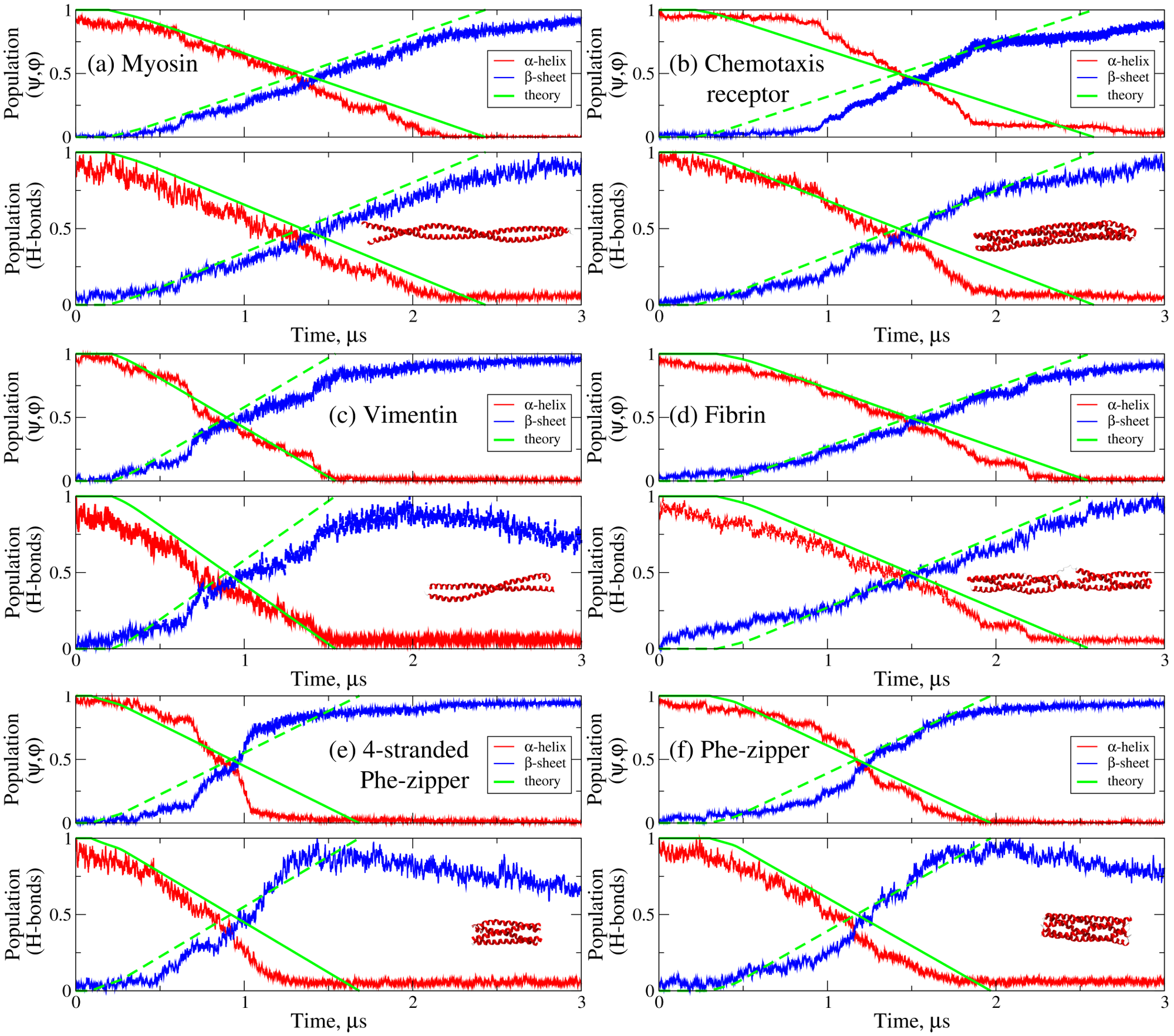 Figure 5
Figure 5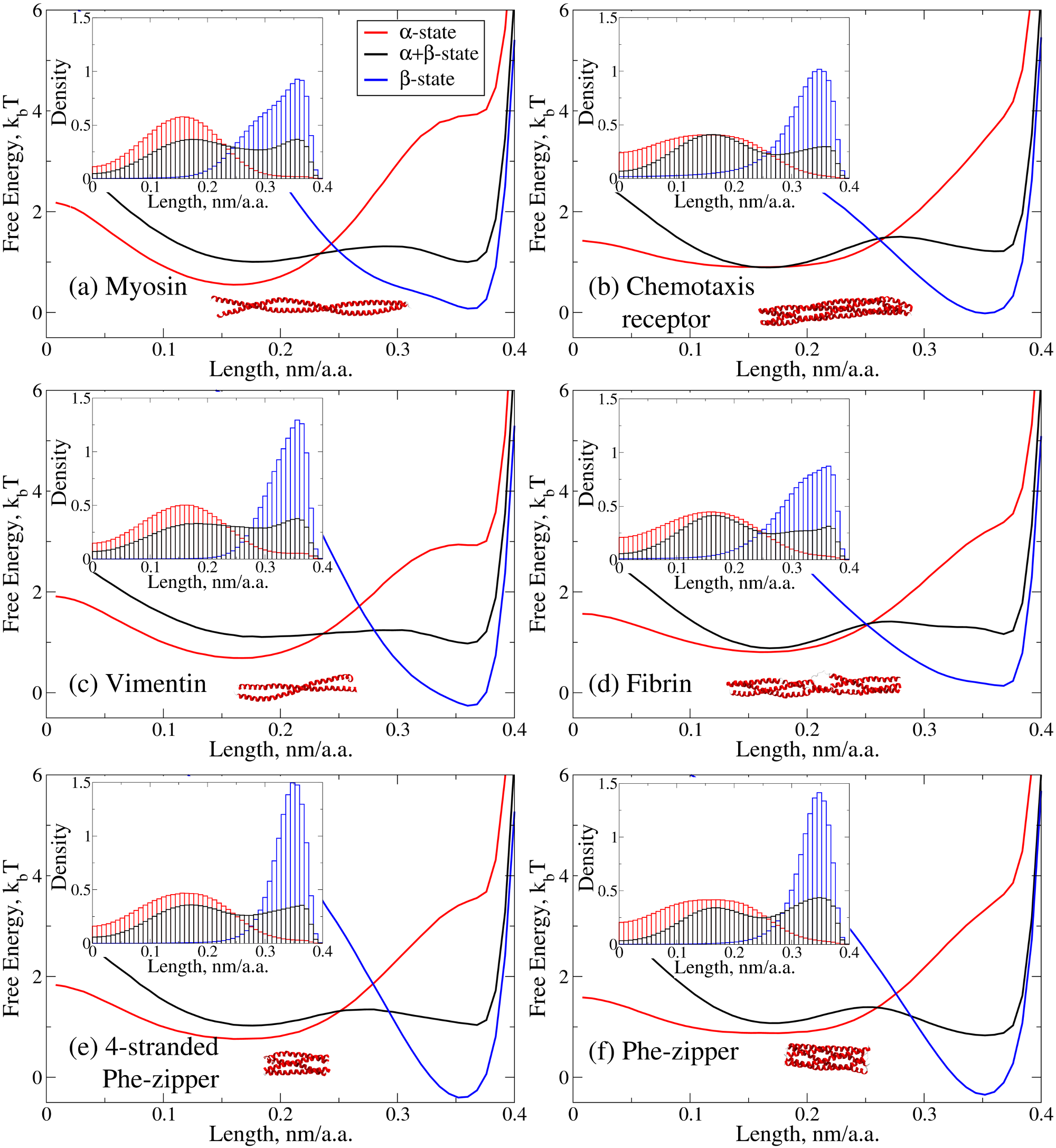 Figure 6
Figure 6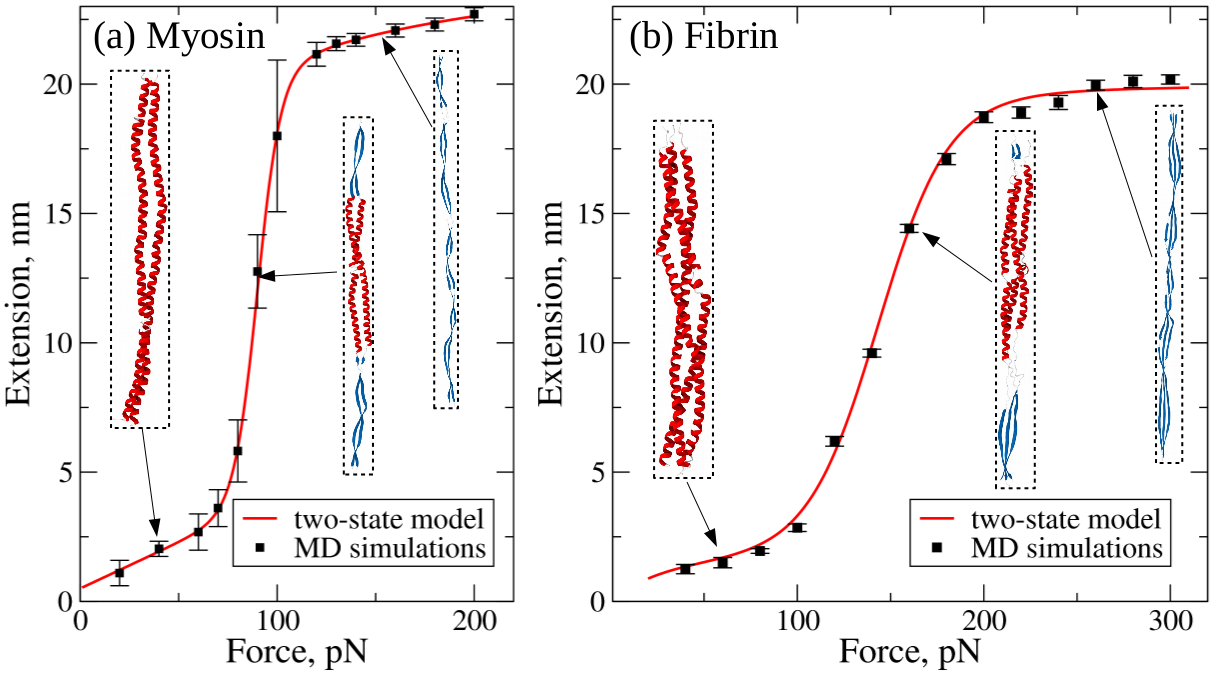 Figure 7
Figure 7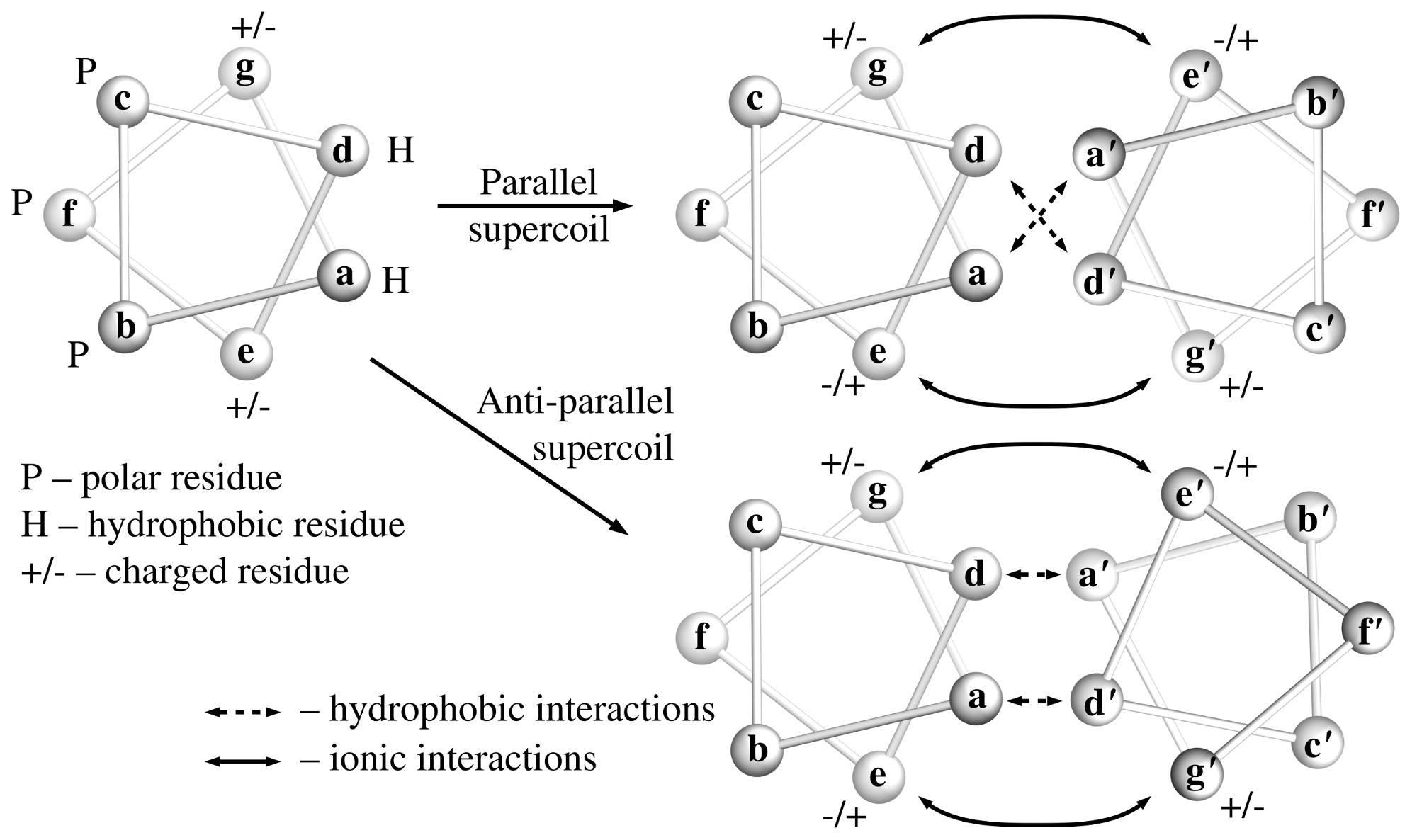 Figure 8
Figure 8| Superhelical protein | , | , | , | , | , | , | , | , | , | , | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| fragments | nm | pN | nm | nm | nm | nm | pN | s-1 | |||
| Myosin | |||||||||||
| Chemotaxis receptor | |||||||||||
| Vimentin | |||||||||||
| Fibrin | |||||||||||
| 4-strand. Phe-zipper | |||||||||||
| Phe-zipper |
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsProtein Structure and Dynamics · Enzyme Structure and Function · Silk-based biomaterials and applications
Dynamic transition from -helices to -sheets in polypeptide
superhelices
Kirill A. Minin
Moscow Institute of Physics and Technology, Dolgoprudny, 141701, Russia
Artem Zhmurov
Moscow Institute of Physics and Technology, Dolgoprudny, 141701, Russia
Kenneth A. Marx
Department of Chemistry, University of Massachusetts, Lowell, MA 01854, USA
Prashant K. Purohit
Department of Mechanical Engineering and Applied Mechanics, University of Pennsylvania, Philadelphia, PA 19104, USA
Valeri Barsegov
Department of Chemistry, University of Massachusetts, Lowell, MA 01854, USA
Moscow Institute of Physics and Technology, Dolgoprudny, 141701, Russia
Abstract
We carried out dynamic force manipulations in silico on a variety of superhelical protein fragments from myosin, chemotaxis receptor, vimentin, fibrin, and phenylalanine zippers that vary in size and topology of their -helical packing. When stretched along the superhelical axis, all superhelices show elastic, plastic, and inelastic elongation regimes, and undergo a dynamic transition from the -helices to the -sheets, which marks the onset of plastic deformation. Using Abeyaratne-Knowles formulation of phase transitions, we developed a theory to model mechanical and kinetic properties of protein superhelices under mechanical non-equilibrium conditions and to map their energy landscapes. The theory was validated by comparing the simulated and theoretical force-strain spectra. Scaling laws for the elastic force and the force for -to- transition to plastic deformation can be used to rationally design new materials of required mechanical strength with desired balance between stiffness and plasticity.
††preprint: APS/123-QED
In 1953 coiled-coils were proposed independently by Crick and Pauling as structures comprised of supercoiled -helical segments. Since then, coiled-coils have been recognized as ubiquitous, critically important, highly stable biomechanical structures, occuring either at the tissue level (hair, blood clots, etc.), in individual cellular structures (intracellular cytoskeleton, flagella, etc.), or as components of individual proteins. Many well studied proteins performing mechanical functions, utilize the superhelical coiled-coil architecture, including ones in the present study: muscle proteins (myosin), intermediate filaments (vimentin), blood clots and thrombi (fibrin), chemotaxis (chemotaxis receptors), cellular transport (kinesin), and bacterial adhesion (protein tetraprachion) Lupas and Bassler (2016). Recently, the unique superhelical symmetry of coiled-coils has inspired the design of new materials Quinlan et al. (2015): short supercoils Arndt et al. (2002), long and thick fibers Potekhin et al. (2001), nanotubes Burgess et al. (2015), spherical cages Fletcher et al. (2013) and synthetic virions Noble et al. (2016). In this study, we solve a longstandng problem, providing a theoretical basis for understanding different coiled-coils’ stability and dynamic properties when undergoing the pulling force induced -helix to -sheet transition. We combined dynamic force manipulations in silico with theoretical modeling and found that all systems studied, with from two-to-five helices forming parallel and anti-parallel supercoil architectures, uniformly undergo three force induced extension regimes including a remarkable plastic phase transition from all -helices to all -sheets. The quantitative agreement between the theory and simulations allows for a new approach to rationally design coiled-coils with specific mechanical properties into novel biomaterials applications.
We used the atomic models (see Supplemental Material, SM) of myosin, vimentin, fibrin, bacterial chemotaxis receptor and phenylalanine zippers (PDB entries: 2FXO Blankenfeldt et al. (2006), 1GK4 Strelkov et al. (2002), 3GHG Kollman et al. (2009), 1QU7 Kim et al. (1999), 2GUV and 2GUS Liu et al. (2006) respectively). (i) Myosin II contains a double-stranded parallel coiled-coil Warrick and Spudich (1987). Upon muscle contraction, tension is transfered along the myosin tail Warrick and Spudich (1987) (experimental force data are available for myosin Schwaiger et al. (2002); Root et al. (2006)). (ii) Vimentin, in intermediate filaments in cells Eriksson et al. (2009); Fletcher and Mullins (2010), helps determine their resistance to mechanical factors Herrmann et al. (2007). Vimentin’s structure contains an -helical rod domain, which can be divided into several double-helical parallel coiled-coil segments Herrmann et al. (2007). (iii) Fibrin forms the fibrous network of a blood clot that stops bleeding Weisel (2005). Triple-helical parallel coiled-coils create the unique visco-elastic properties of fibrin Zhmurov et al. (2011, 2012). (iv) Bacterial chemotaxis receptor is responsible for signal transduction across cell membranes Kim et al. (1999). The cytoplasmic domain contains two double-stranded anti-parallel coiled-coils forming a four-stranded superhelix. (v) Phenylalanine zippers, artificial four-to-five stranded parallel supercoils, are promising biomaterials with tunable properties Liu et al. (2006); Burgess et al. (2015).
Force spectroscopy in silico: We employed all-atom Molecular Dynamics (MD) simulations using the Solvent Accessible Surface Area (SASA) model with CHARMM19 unified hydrogen force-field Ferrara et al. (2004) implemented on a GPU (see SM) Zhmurov et al. (2012). Protein models were constructed using the CHARMM program Brooks et al. (2009). We used a lower damping coefficient \gamma$$=$$0.15~{}ps^{-1} vs. \gamma$$=$$50~{}ps^{-1} for ambient water at 300K for more efficient sampling of conformational space Falkovich et al. (2010). To mimic experimental conditions, we implemented the pulling plane with harmonically attached tagged residues at one end of the molecule and the resting plane with constrained residues at the other (Fig. 1a). The pulling plane was connected to a virtual cantilever moving with a velocity v_{f}$$=$$10^{4}-10^{6}\mu m/s and ramping up the force f$$=$$r_{f}t with a loading rate r_{f}$$=$$k_{s}v_{f}$$=$$10^{-3}$$-$$10^{-1}N/s (k_{s}$$=$$100~{}pN/nm is the cantilever spring).
The -to- transition: All superhelices undergo the force-driven transition from -helices to -sheets regardless of the number of helices and parallel or anti-parallel architecture. In Fig. 1, we display the force-strain () curves (and structure snapshots) for bacterial receptor and myosin which are reminiscent of experimental force extension profiles Schwaiger et al. (2002); Root et al. (2006). The plateau force for myosin f^{*}$$\sim$$100~{}pN (Fig. 1d) is higher than the experimental value of \sim$$40~{}pN Root et al. (2006) due to 10^{4}$$-$$10^{5}-fold faster pulling speeds used in silico. Results obtained for vimentin, fibrin and phenylalanine zippers are in Fig. S1. The f$$\varepsilon-curves reflect the three regimes of dynamic mechanical response of the superhelices to an applied force: i) elastic regime I of coiled-coil elongation at low strain (f$$\sim$$\varepsilon; \varepsilon$$<$$0.2), characterized by a linear growth of with ; ii) *plastic transition regime II * of protein unfolding at intermediate strain (f$$=const; 0.2$$<$$\varepsilon$$<$$0.9), where the -to- transition occurs; and iii) inelastic regime III of non-linear elongation of the -structure at high strain (f$$\sim$$\varepsilon^{2}; \varepsilon$$>$$0.9). In the -to- transition regime, the coiled-coils unwound and underwent a large 80$$-$$90$$\% elongation. The -to- transition nucleated at both ends of the molecule, and two phase boundaries propagated towards the center (snapshots 1–2, Fig. 1c,e). All of these features were observed irrespective of the number and architecture of -helices.
Dihedral angles (,) are sensitive to changes in protein secondary structure Srinivasan and Rose (1995). This is reflected in migration of -angles from the -region to the -region in the Ramachandran plots (insets to Fig. 1b,d). Furthermore, in the -state H-bonds are all intramolecular while -sheets form due to intermolecular H-bonds linking parallel or antiparallel -strands. We profiled the probabilities of finding a system in the -state and -state using dihedral angles and H-bonds. We calculated the relative amount of intrachain bonds p_{\alpha}$$=$$N_{intra}/N_{H} and interchain bonds p_{\beta}$$=$$N_{inter}/N_{H} (-total number of H-bonds), and the relative amounts of residues in the -region p_{\alpha}$$=$$N_{\alpha}/N_{\phi\psi} and -sheet region p_{\beta}$$=$$N_{\beta}/N_{\phi\psi} (-total number of -angles). The profiles of and displayed in Fig. 2 for bacterial receptor and myosin show the following: (i) the -helical (-strand) content decreases (increases) with time (and force f$$=$$r_{f}$$t); (ii) the transformation from -helices to -sheets is a two-state transition; and (iii) this transition is accompanied by redistribution of -angles (\alpha$$\to$$\beta; Fig. 1b,d insets) and reconfiguration of H-bonds (from intra- to interchain H-bonds; snapshots in Fig. 2). We obtained similar results for the vimentin, fibrin and Phe-zippers (Fig. S2). Hence, the H-bonds and -angles can be used as molecular signatures to characterize the -to- transition in proteins with superhelical symmetry.
Two-state model: Under the constant-force conditions (force-clamp), the -to- transition can be described using a two-state model. The sigmoidal extension-force phase diagram for myosin and fibrin coiled-coils in Fig. S4 is divided into the -phase and -phase Zhmurov et al. (2012). The -state can be modeled as an entropic spring with energy G$$=$$k_{\alpha}$$\Delta X_{\alpha}^{2}/2, where is the spring constant and \Delta X_{\alpha}$$=$$f/k_{\alpha} is extension. The -state can be described by a wormlike chain Barsegov et al. (2006) with energy G_{\beta}$$=$$(3k_{B}T/2l_{\beta})$$\int$$[\partial n(s)/\partial s]^{2}ds, where is the persistence length, and is the temperature. A pulling force stretches the -helices by a fractional extension y_{\alpha}(f)$$=$$\Delta X_{\alpha}(f)/L_{\alpha}, where is the maximal extension in the -state, and lowers the energy barrier by increasing the transition probability p_{\beta}(f)/p_{\alpha}(f)$$=$$\exp{[-\Delta G(f)/k_{B}T]}. The force induces elongation in the -states, y_{\beta}(f)$$=$$\Delta X_{\beta}(f)/L_{\beta}, where is the maximal extension in the -states. Here, y_{\beta}(f)$$=$$1$$-$$\{\xi(q)^{1/3}$$+$$[4q/3-1]/\xi(q)^{1/3}\}^{-1}, where \xi(q)$$=$$2$$+$$\{4$$-$$[(4/3)q$$-$$1]^{3}\}^{1/2} and q$$=$$fl_{\beta}/k_{B}T. The total extension is \Delta X(f)$$=$$p_{\alpha}$$y_{\alpha}$$L_{\alpha}$$+$$p_{\beta}$$y_{\beta}$$L_{\beta} Zhmurov et al. (2012).
Continuum theory: The -to- transition in the non-equilibrium regime of time-dependent force can be described using the Abeyaratne-Knowles formulation of phase transitions Abeyaratne and Knowles (2006); Raj and Purohit (2010). The displacement of a material point at reference position at time is given by u(x,t)$$=$$X(x,t)$$-$$x. The end at x$$=[math] is fixed, and u(0,t)$$=[math] for all . At the other end x$$=$$L, u(L,t)$$=$$\Delta$$X(t), where \Delta$$X(t)$$=$$v_{f}t$$>[math] ([math]) when the sample is loaded (unloaded). The -phase is described by a stretch \Gamma_{\alpha}(f)$$=$$X_{\alpha}(f)/L, f$$<$$f_{\alpha\beta}^{*}, where and are the end-to-end distance and critical force for the -phase. We set L$$=$$L_{\alpha} throughout. At f$$=$$f_{\alpha\beta}, the -phase nucleates and f_{\alpha\beta}^{*}$$>$$f_{\alpha\beta}$$>$$f_{0}, where is the Maxwell force at which the free energies per residue for the two phases become equal. The -phase is described by a stretch \Gamma_{\beta}(f)$$=$$X_{\beta}(f)/L, f_{\beta\alpha}^{*}$$<$$f$$<$$\infty, where and are the end-to-end distance and critical force in the -phase. A transformation strain is \gamma(f)$$=$$\Gamma_{\beta}(f)$$-$$\Gamma_{\alpha}(f), f_{\alpha\beta}^{*}$$\geq$$f$$\geq$$f_{\beta\alpha}^{*}.
The equation of motion for the 1D continuum (assuming negligible drag and inertia forces) is \partial f/\partial x$$=[math], so that is constant for [math]<$$x$$<$$L. If f_{\alpha\beta}^{*}$$<$$f$$<$$f_{\beta\alpha}^{*}, a mixture of the - and -phases is possible, and the total extension is given by
[TABLE]
A kinetic relation expressed in terms of the force describes the evolution of , i.e.
[TABLE]
where is a material property. By differentiating Eq. (1) and eliminating using Eq. (2), we obtain:
[TABLE]
where g(f)$$=$$\Gamma_{\alpha}(f)\Gamma_{\beta}^{\prime}(f)$$-$$\Gamma_{\alpha}^{\prime}(f)\Gamma_{\beta}(f). From Eq. (3) a force plateau (\dot{f}$$=[math]) forms at f$$=$$f^{*} if either , or
[TABLE]
Because the height of force plateau depends on and, hence, is strain-rate () dependent, Eq. (4) defines the force plateau height.
Application to -to- transition: Calculating the f$$\varepsilon-curves requires a kinetic relation and a nucleation criterion. By treating the -phase as an entropic spring and the -phase as a wormlike chain, we obtain \Gamma_{\alpha}(f)=f/\kappa_{\alpha}$$+1 and \Gamma_{\alpha}^{\prime}(f)$$=$$1/\kappa_{\alpha} for the -phase, where \kappa_{\alpha}$$=$$k_{\alpha}/L_{\alpha}, and \Gamma_{\beta}(f)$$=$$(L_{\beta}/L_{\alpha})$$(1-\sqrt{k_{B}T/4l_{\beta}f}) and \Gamma_{\beta}^{\prime}(f)$$=$$(L_{\beta}/4L_{\alpha})\sqrt{k_{B}T/l_{\beta}f^{3}} for the -phase ( is obtained by inverting the wormlike chain formula for the force vs. extension ). The -to- transformation strain becomes:
[TABLE]
and \gamma^{\prime}(f)$$=$$(L_{\beta}/4L_{\alpha})\sqrt{k_{B}T/l_{\beta}f^{3}}$$-$$1/\kappa_{\alpha}. To obtain the kinetic relation (Eq. (2)), we use the Arrhenius rates for forward and backward transitions and Raj and Purohit (2011),
[TABLE]
where is an attempt frequency, and
[TABLE]
are the energy barriers. In Eq. (7), and are the force-free energy barrier and energy difference (per residue length) between the - and -states, respectively, and and are transition distances (see the inset to Fig. 3a). The detailed balance is given by:
[TABLE]
Setting p_{\alpha}$$=$$p_{\beta} in Eq. (8), we obtain the Maxwell force:
[TABLE]
Initially, the continuum is in the -phase. Before the nucleation of the phase boundary, the force in the linear elastic regime I (Fig. 1b,d) is given by
[TABLE]
The nucleation criterion requires that when f$$=$$f_{\alpha\beta}, \Delta X$$=$$\Delta X_{\alpha\beta}$$=$$f_{\alpha\beta}L/\kappa_{\alpha}, a phase boundary nucleates at x$$=[math] and x$$=$$L. The force is governed by Eq. (3) with the initial condition f$$=$$f_{\alpha\beta}. The phase boundaries move through the continuum and convert all the material into the -phase. This marks the onset of the plastic transition regime II, which corresponds to the force plateau in f$$\varepsilon-curves (Fig. 1b,d; see SM):
[TABLE]
Using the structures generated for the mixed \alpha$$+$$\beta-phase, we run long simulations for myosin and fibrin with pulling force gradually quenched to zero (with same ). The reverse \beta$$\to$$\alpha transition was not observed. Hence, superhelices extended and -sheets formed permanently, i.e. the \alpha$$\to$$\beta-transition marks the onset of plasticity in protein superhelices. Stretching of the -phase continues in the inelastic regime III (Fig. 1b,d) and the force is given by the wormlike chain formula:
[TABLE]
Force spectra and energy landscape: Parameters accessed directly is MD simulations are the end-to-end distances in the -phase ; the slope of (elastic) portion of an f$$\varepsilon-curve ; the maximum extension in the -phase ; and f_{0}$$\approx$$f^{*} ( is obtained using a wormlike chain fit to the inelastic part of a f$$\varepsilon-curve; see Fig. 1). The other parameters, , , , and , are estimated by mapping the free-energy landscape. We employed a mean-field approach, G(x)$$=$$-k_{B}T$$\ln P(x), to profile as a function of projection of the average residue length (unit length) along the superhelical axis (reaction coordinate). An example of for myosin is in the inset to Fig. 3a (see Fig. S3a for and for other superhelices). For sampled at f$$\approx[math], and can be readily estimated. Since and barely change with (Fig. 3a), is obtained using the Maxwell force (Eq. (9)), and is obtained using either of Eqs. (7). is estimated by fitting the profiles of and p_{\beta}$$=$$1$$-$$p_{\alpha} shown in Fig. 2 with Eq. (6). All paramter values are presented in Table 1.
We used the values of , , , , and from Table 1 as the input and Eqs. (10)-(12) to fit the simulated f$$\varepsilon-curves for all the protein superhelices at all pulling speeds (in Eqs. (10) and (12), \varepsilon(t)$$=$$\Delta$$X(t)/L is the time-dependent strain). This enabled us to refine the parameter values and estimate (shown in squared brackets in Table 1). The results of fitting for chemotaxis receptor and myosin presented in Fig. 1b,d and in Fig. S1 for the other superhelices show excellent agreement between simulated and theoretical f$$\varepsilon-curves, which validates our theory. The refined final values of model parameters from the fit do not differ much from the initial input, which points to the internal consistency between the results of theory and simulations. We used these parameters and Eq. (6) to reconstruct the profiles and . The Fig. 2 results show that, although H-bond redistribution and dihedral angles’ migration capture the -to- transition, the H-bond based estimation of and results in a better agreement with the simulations.
Scaling laws: The theory predicts that the stiffness of superhelices is inversely proportional to their length (Eqs. (10)), so shorter (longer) superhelices are stiffer (less stiff). It also predicts a logarithmic scaling of the critical force with the pulling speed (loading rate r_{f}$$=$$k_{s}$$v_{f}; Eq. (11)). We tested this prediction by performing a fit of the vs. profiles for superhelices from chemotaxis receptor and myosin with Eq. (11) borrowing parameter values from Table 1. The Fig. 3b results show excellent agreement between the predicted and simulated values of extracted from the f$$\varepsilon-spectra (Figs. 1 and S1), which further validates our theory. Also, f^{*}$$\sim$$N_{h} — the number of -helices forming a superhelix (N_{h}$$=$$2$$-$$5; Table 1). The profiles of vs. in Fig. 3c show a roughly additive contribution to the mechanical strength from -helices, which weakly cooperate to sustain the stress. For v_{f}$$=$$10^{5}\mum/s, increases from for double-helical myosin tail and vimentin ( per helix) to for the triple-helical fibrin coiled-coil (\sim$$62~{}pN per helix), to for four-stranded Phe-zipper (\sim$$67~{}pN per helix), and to for Phe-zipper with five -helices (\sim$$77~{}pN per helix). A lower f^{*}$$=$$232~{}pN for the four-stranded chemotaxis receptor (\sim$$58~{}pN per helix) is due to the antiparallel arrangement implying that parallel arrangement of -helices provides higher mechanical strength.
The developed theory can be used to accurately describe dynamic transitions in wild-type and synthetic superhelical polypeptides under mechanical non-equilibrium conditions and model their force-strain spectra from dynamic force experiments. The theory can be used to probe mechanical and kinetic characteristics of any coiled-coil superhelical polypeptide and to map out their free-energy landscapes. The slope and -intercept of the line of critical force vs. (Fig. 3b) can be used to estimate the critical distance and the force-free barrier height (SM). Scaling laws for the elastic force vs.length , and vs. loading rate , and the dependence of on and number of helices provide a powerful new method to rationally design novel synthetic biomaterials with the required mechanical strength and balance between stiffness and plasticity.
Acknowledgments: This work was supported by NSF (grant DMR1505662 to VB and PKP), American Heart Association (grant-in-aid 13GRNT16960013 to VB), and Russian Foundation for Basic Research (grants 15-37-21027, 15-01-06721 to AZ).
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Lupas and Bassler (2016) A. Lupas and J. Bassler, Trends Bioch. Sci. 42 , 130 (2016).
- 2Quinlan et al. (2015) R. Quinlan, E. Bromley, and E. Pohl, Curr. Opin. Cell Biol. 32 , 131 (2015).
- 3Arndt et al. (2002) K. M. Arndt, J. N. Pelletier, K. M. Müller, A. Plückthun, and T. Alber, Structure 10 , 1235 (2002).
- 4Potekhin et al. (2001) S. Potekhin, T. Melnik, V. Popov, N. Lanina, A. Vazina, P. Rigler, A. Verdini, G. Corradin, and A. Kajava, Chem. Biol. 8 , 1025 (2001).
- 5Burgess et al. (2015) N. C. Burgess, T. H. Sharp, F. Thomas, C. W. Wood, A. R. Thomson, N. R. Zaccai, R. L. Brady, L. C. Serpell, and D. N. Woolfson, J. Am. Chem. Soc. 137 , 10554 (2015).
- 6Fletcher et al. (2013) J. M. Fletcher, R. L. Harniman, F. R. H. Barnes, A. L. Boyle, A. Collins, J. Mantell, T. H. Sharp, M. Antognozzi, P. J. Booth, N. Linden, M. J. Miles, R. B. Sessions, P. Verkade, and D. N. Woolfson, Science 340 , 595 (2013).
- 7Noble et al. (2016) J. Noble, E. De Santis, J. Ravi, B. Lamarre, V. Castelletto, J. Mantell, S. Ray, and M. Ryadnov, J. Am. Chem. Soc 138 , 12202 (2016).
- 8Blankenfeldt et al. (2006) W. Blankenfeldt, N. Thomä, J. Wray, M. Gautel, and I. Schlichting, Proc. Natl. Acad. Sci. USA 103 , 17713 (2006).