This paper introduces new classes of directed strongly regular graphs using algebraic methods like Kronecker product, semidirect product, and Cayley graphs, and analyzes their properties and automorphisms.
Contribution
It presents novel constructions of DSRGs via algebraic techniques and provides conditions for Cayley graphs to be DSRGs, expanding the understanding of their structure.
Findings
01
New classes of DSRGs constructed using algebraic methods
02
Conditions for Cayley graphs to be DSRGs established
03
Analysis of automorphism groups and neighbor structures in DSRGs
Abstract
The concept of directed strongly regular graphs (DSRG) was introduced by Duval in "A Directed Graph Version of Strongly Regular Graphs" [Journal of Combinatorial Theory, Series A 47(1988)71-100]. Duval also provided several construction methods for directed strongly regular graphs. In this paper, We construct several new classes of directed strongly regular graphs which are obtained by using Kronecker matrix product, Semidirect product and Cayley coset graph. At the same time, using group representation, for two special cases, we give some other sufficient and necessary conditions of Cayley graphs to be DSRG. At last, we finish this paper with a discussion of some propositions of in(out)-neighbours and automorphism group in directed strongly regular graphs.
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsFinite Group Theory Research · Rings, Modules, and Algebras · Macrophage Migration Inhibitory Factor
Full text
The constructions of directed strongly regular graph by Algebraic method
Department of Mathematics and Computational Science, Xiangtan Univerisity, Xiangtan, Hunan, 411105, PR China
Abstract
The concept of directed strongly regular graphs (DSRG) was introduced by Duval in “A Directed Graph Version of Strongly Regular Graphs” [Journal of Combinatorial Theory, Series A 47(1988)71-100]. Duval also provided several construction methods for directed strongly regular graphs. In this paper, We construct several new families of directed strongly regular graphs which are obtained by using Kronecker matrix product, Semidirect product, Cayley coset graph. At the same time, we give some sufficient and necessary conditions of two special families of Cayley graphs to be DSRG by using group representation theory. At last, we discuss some propositions of in(out)-neighbour set and automorphism group in directed strongly regular graphs.
A directed strongly regular graph (DSRG) with parameters (n,k,μ,λ,t) is a k-regular directed graph on n vertices such that every vertex is on t 2-cycles, and the number of paths of length two from a vertex x to a vertex y is λ if there is an edge directed from x to y and it is μ otherwise. A DSRG with t=k is an (undirected) strongly regular graph (SRG). Duval showed that DSRGs with t=0 are the doubly regular tournaments. It is therefore usually assumed that 0<t<k.
Another definition of a directed strongly regular graph, in terms of its adjacency matrix. Let D be a directed graph
with n vertices. Let A=A(D) denote the adjacency matrix of D, and let I=In and
J=Jn denote the n×n identity matrix and all-ones matrix, respectively. Then D is a directed strongly regular graph with parameters (n,k,μ,λ,t) if
and only if (i) JA=AJ=kJ and (ii) A2=tI+λA+μ(J−I−A). Duval gave some propositions of DSRG in [1] .
We shall assume that the reader is familiar with standard terminology on directed graphs(see,e.g.,[2]).The vertex set and the arc set of a digraph D are denote by V(D) and E(D). If xy is an arc of digraph D, we say xdominatesy and write x→y. Then the out-neighbour setND+(x) of a vertex x is the set of vertices dominated by x, and the in-neighbour setND−(x) of a vertex x is the set of vertices dominating x.
The number dD+(v)=∣ND+(x)∣ and dD−(v)=∣ND−(x)∣ are the outdegree and indegree of x.
Proposition 1**.**
(see [1])
A directed strongly regular graph with parameters (n,k,μ,λ,t) with 0<t<k satisfy
[TABLE]
[TABLE]
[TABLE]
where d is a positive integer, and
[TABLE]
Proposition 2**.**
(see [1])
A directed strongly regular graph with parameters (n,k,μ,λ,t) has three distinct integer eigenvalues
[TABLE]
The multiplicities are
[TABLE]
respectively.
Proposition 3**.**
(see [1])
If G is a DSRG with parameters (n,k,μ,λ,t), then the complementary G′ is also a DSRG with parameters (n′,k′,μ′,λ′,t′), where k′=(n−2k)+(k−1), λ′=(n−2k)+(μ−2), t′=(n−2k)+(t−1), μ′=(n−2k)+λ.
We note that, although two DSRGs have the same parameters, they may not be isomorphic.
There are many constuction methods for DSRG. Duval described some methods including constructions using quadratic residue, block construction of permutation matrices and the Kronecker product [1]. In addition, some of known constructions use combinatorial block designs [3], coherent algebras[3], semidirect product [4], finite geometries [5, 3], matrices[6], block matrices[7], finite incidence structures [8, 9] and Cayley graph[10, 3] or generalized Cayley graph [11].
In section 2, we construct 3 families of DSRGs by using Kronecker matrix product.
We construct DSRGs with parameters (4n2,2n2−2,n2−1,n2−3,n2−1), (4n2,2n2,n2+1,n2−1,n2+1) for odd integer n and (4n2,2n2,n2+4,n2−4,n2+4) for integer 4∣n.
In section 3, by using semidirect product, we construct 4 families of DSRGs with parameters:
(1)(pn,vn,p−1nv2,p−1nv(v−1),p−1nv2) for 1≤v≤p−2,
(2)(pn,n(v+1)−1,p−1nv(v+1),n−2+p−1nv2,n−1+p−1nv2) for 1≤v≤p−2;
In section 4, we give a sufficient and necessary condition of Cayley coset graph to be DSRG with parameters (n,k,μ,λ,t) in terms of the group ring.
In section 5, we focus on the Cayley graph C(G,S) where the group G is two semidirect product of two cyclic group. By using group representation theory, we can determine the eigenvalues and minimum polynomial of the adjacent matrix of Cayley graph, so we can give some sufficient and necessary condition of Cayley graphs C(Cn⋊θ(k)Cm,A′×Cm) and C(Cn⋊θ(k)Cm,(A′+eA)×Cm∖eA) to be DSRG, where A′ is a proper subset of Cn∖e (e is the identity element of group Cn). This suggests that the group representation theory can be used to investigate DSRG.
In section 6, we make a discussion of the vertices which have the same out-neighbour set (in-neighbours set) in DSRG. Meanwhile, we also give an upper bound of the order of automorphism group of directed strongly regular Cayley graph.
2 Constructions of DSRG by using Kronecker matrix product
In this section, we construct directed strongly regular graphs from known DSRGs in terms of Kronecker matrix
product. Duval [1] observed that if t=μ and A satisfies above equations (i) and (ii),
then so does A⊗Jm for every positive integer m; and so, we have:
Proposition 4**.**
(see [1])
If there exists a directed strongly regular graph with parameters (n,k,μ,λ,t) with t=μ, then for each positive integer m there exists a directed strongly regular graph with parameters (mn,mk,mμ,mλ,mt)
Duval [1] also observed that if there exists a DSRG with parameters (n,k,μ,λ,t) with t=λ+1, then digraph corresponding to adjacency matrix A⊗Jm+In⊗(Jm−Im) is a DSRG with parameters
(mn,mk+1−1,mμ,m(t+1)−2,m(t+1)−1).
Definition 1**.**
Let A=(aij)m×n and B=(bij)t×s are two matrices over number field K, then the Kronecker matrix
product of A and B is defined by
[TABLE]
Let D(A) denote with the digraph respect to adjacent matrix A.
Theorem 1**.**
Let D be a directed strongly regular graph with the parameters (n,k,μ,λ,t) satisfies t=μ and 4k=n+2λ+2μ. Let A=A(D) be the adjacent matrix of D,and B=(J−A)⊗A+A⊗(J−A). Then D(B) is a directed strongly regular graph with the parameters
[TABLE]
Proof.
Note that J2=nJ, and JA=AJ=kJ. Thus by a simple computation, we can obtain that
[TABLE]
[TABLE]
[TABLE]
Note that
[TABLE]
[TABLE]
[TABLE]
Thus, a simple calculation shows that
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
and
[TABLE]
[TABLE]
We note that 2μ(n−2k+μ)+2(k−μ)2=2μ(2k−2λ−μ)+2(k−μ)2=2(k2−2μλ). Thus from (2),(3),(4),(5),
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
Hence D(B) is a DSRG, let the parameters of D(B) be (n1,k1,μ1,λ1,t1), then n1=n2,k1=2k(n−k),μ1=t1=2(k2−2μλ),λ1=2(k2−2μλ)+(λ−μ)(n−4k+4μ)=2(k2−2μλ)−2(λ−μ)2=2(k2−λ2−μ2). This completes the proof.
∎
Lemma 2**.**
(see [12],[13])
If (n,k,μ,λ,t) are the parameters of a DSRG with t=μ and rank r and with nk=ba, where a and b are relatively prime integers, then
[TABLE]
for some positive integer m, where c is the greatest common divisor
[TABLE]
We now give the possible parameters of DSRGs with t=μ, and 4k=n+2λ+2μ.
Theorem 3**.**
*If (n,k,μ,λ,t) are the parameters of a DSRG with t=μ, 4k=n+2λ+2μ, then for positive integer m, the possible parameters have just 4 classes:
(1)(4(r−1)m,2(r−1)m,rm,(r−2)m,rm) for odd integer r;
(2)(2(r−1)m,(r−1)m,2rm,(2r−1)m,2rm) for even integer r;
(3)(2rm,(r−1)m,2r−1m,2r−3m,2r−1m) for odd integer r;
(4)(4rm,2(r−1)m,(r−1)m,(r−3)m,(r−1)m) for even integer r.*
Proof.
From Lemma 2, let n=c(r−1)b2m, k=c(r−1)abm, μ=t=cra2m, λ=c(ar−b)am. Then 4k=n+2λ+2μ implies that
[TABLE]
then 4(r−1)ab=(r−1)b2+2ra2+2(ar−b)a. Thus
[TABLE]
Case 1. If b−2a=0, then c=gcd(2a2,ra2,4(r−1)a2)=a2gcd(2,r) and n=(2,r)4(r−1)m,k=(2,r)2(r−1)m,μ=(2,r)rm,λ=(2,r)r−2m,t=(2,r)rm. If 2∤r, then (n,k,μ,λ,t)=(4(r−1)m,2(r−1)m,rm,(r−2)m,rm). If 2∣r, then (n,k,μ,λ,t)=(2(r−1)m,(r−1)m,2rm,(2r−1)m,2rm).
Case 2. If b−2a=0, then r(b−2a)=b, b(r−1)=2ar, b∣2ar. Since gcd(a,b)=1, we can obtain that b∣2r.
If 2∤b, then b∣r. Hence b−2a=1, r=b=2a+1 and c=gcd(a(2a+1),(2a+1)a2,2a(2a+1)2)=a(2a+1)=2r(r−1). Thus (n,k,μ,λ,t)=(c(r−1)b2m,c(r−1)abm,
If 2∣b, let b=2b′, then b′∣r. By equation (6), we have r(b′−a)=b′. Thus b′−a=1, b=2(a+1) and r=a+1. Then c=gcd(2a(a+1),(a+1)a2,4a(a+1)2)=a(a+1)gcd(2,a,4(a+1))=a(a+1)=r(r−1), so (n,k,μ,λ,t)=(4rm,2(r−1)m,(r−1)m,(r−3)m,(r−1)m).
∎
Remark 1**.**
These possible parameters can be rewritten as
(R1)(2nm,nm,(2n+1)m,(2n−1)m,(2n+1)m) for integer 4∣n (2(r−1) is replaced by n);
(R2)$$(2nm,nm,\frac{n+1}{2}m,\frac{n-1}{2}m,\frac{n+1}{2}m) for odd integer n(r−1 is replaced by n);
(R3)$$(2nm,(n-1)m,\frac{n-1}{2}m,\frac{n-3}{2}m,\frac{n-1}{2}m) for odd integer n(r is replaced by n);
(R4)$$(2nm,(n-2)m,(\frac{n}{2}-1)m,(\frac{n}{2}-3)m,(\frac{n}{2}-1)m) integer 4∣n (2r is replaced by n).
For odd n, the DSRG with parameters (2n,n−1,2n−1,2n−3,2n−1) corresponding to case (R3) in Remark 1 is realizable which was constructed in [6] by using Cayley graph. Then from the Proposition 3, the complementary graph of (2n,n−1,2n−1,2n−3,2n−1)−DSRG is a DSRG with parameters (2n,n,2n+1,2n−1,2n+1) which corresponding to case (R2).
For even n, the DSRG with parameters (2n,n−1,2n−1,2n−1,2n) was constructed in [10]. Then for integer 4∣n, the complementary graph of it is a DSRG with parameters (2n,n,2n+1,2n−1,2n+1) which corresponding to case (R1). Thus we have following 3 Theorems.
Theorem 4**.**
For odd integer n, there exist directed strongly regular graph with the parameters (4n2,2n2−2,n2−1,n2−3,n2−1).
Proof.
A DSRG with parameters(2n,n−1,2n−1,2n−3,2n−1) was constructed, then Theorem 4 follows from Theorem 1.
∎
Theorem 5**.**
For odd integer n, there exist directed strongly regular graph with the parameters (4n2,2n2,n2+1,n2−1,n2+1).
Proof.
A DSRG with parameters(2n,n,2n+1,2n−1,2n+1) was constructed, then Theorem 5 follows from Theorem 1.
∎
Theorem 6**.**
For integer 4∣n, there exist directed strongly regular graph with the parameters (4n2,2n2,n2+4,n2−4,n2+4).
Proof.
A DSRG with parameters(2n,n,2n+1,2n−1,2n+1) was constructed, then Theorem 6 follows from Theorem 1.
∎
3 Constructions of DSRG(Cayley graphs) by using Semidirect product
In [4] Duval, Art M., and Dmitri Iourinski constructed a new infinite family of directed strongly regular
graphs, as Cayley graphs of certain semidirect product groups, these results generalizes
an earlier construction of Klin, Munemasa, Muzychuk, and Zieschang on some
dihedral groups.
In this section, using classical number theory, we also construct some new families directed strongly regular Cayley graphs C(G,S), where groups G is semidirect product of two groups.
At first, we give some basic definitions of Cayley graph, gruop ring, Semidirect product and primitive root. Let eG or simply e to be the identity element of G. The following definitions are the same with Duval [4].
Definition 2**.**
Let G be a finite group and S⊂G\e(Remove identity element e from G). The Cayley graph of G generated
by S, denoted by C(G,S), is the digraph H such that V(H)=G and x→y if and only if
x−1y∈S, for ∀x,y∈G.
Definition 3**.**
For any finite group G, the group ring Z[G] is defined as the set of all formal
sums of elements of G, with coefficients from Z. i.e.
[TABLE]
The operations + and ⋅ on Z[G] are given
by
[TABLE]
[TABLE]
For any subset X of G, Let X denote the
the element of the group ring Z[G] that is the sum of all elements of X. i.e.
[TABLE]
The Lemma below allows us to express a sufficient and necessary condition for a Cayley graph to be directed strongly regular graph in terms of the group ring.
Lemma 7**.**
The Cayley graph C(G,S) of G with respect to S is a directed strongly regular graph with parameters (n,k,μ,λ,t) if and only if ∣G∣=n, ∣S∣=k, and
[TABLE]
Definition 4**.**
Let θ:B→AutA be an action of a group B on another group A: Let
A⋊θB be the direct product set of A and B; i.e., set of pairs (a,b) operation for the product of two elements
[TABLE]
Then A⋊θB is a group of order ∣A∣∣B∣, This group is called the semidirect product of A and B
with respect to the action θ.
From the definition of semidirect product of A and B, we can obtain that A is isomorphic to A×eB, i.e., A≅A×eB, and B is isomorphic to eA×B, i.e., B≅eA×B.
Then we can equate a with (a,eB) for a∈A, and b with (eA,b) for b∈B, and it is easy to verify that ab=(a,eB)(eA,b)=(a,b), ba=(eA,b)(a,eB)=(a,b)(a′,b′)=([θ(b)(a)],b)=[θ(b)(a)]b, eA=(eA,eB)=eB=e(e is the identity element of A⋊θB).
Definition 5**.**
For positive integer s, which coprime with n, we denote δn(s) with the the least positive integer k such that sk≡1(modn). If δn(s) is equal to the totient of n
, the number of positive integers that are both less n and coprime to n, i.e. δn(s)=φ(n), then we say that s is a primitive root of modulo n.
From the classical number theory, the following result characterizes the existence of primitive root of modulo n.
Lemma 8**.**
There is a primitive root of modulo n if and only if n=2 or 4, or n=pk or 2pk for odd prime an k∈N.
Let Cn=⟨x⟩ be multiplicative cyclic groups of orders n with generator x.
3.1 Cayley graph C(Cp⋊θ(m)Cn,S) to be DSRG
Let A=Cp=⟨a⟩ be multiplicative cyclic groups of odd prime orders p, B=Cn=⟨x⟩ be another multiplicative cyclic groups of orders n.
Let m be an integer such that (m,p)=1, m≡1(modp), mn≡1(modp). The map βm∈AutCp given by βm : ai→ami is an automorphism, and the map θ(m): B→AutCp given by θ(m)(xu)=βmu is a homomorphism. Then A⋊θ(m)B=⟨a,x∣ap=xn=e,xa=amx⟩ is a group of order pn.
Let H be a proper subset of {1,2,⋯,p−1}. We denote v with the cardinalty of H, i.e.∣H∣=v.
3.1.1 (pn,vn,p−1nv2,p−1nv(v−1),p−1nv2)−DSRG for 1≤v≤p−2
Theorem 9**.**
Let A=Cp, p be an odd prime, m be a primitive root of module p, n be an integer such that p−1∣n. Let B=⟨x∣xn=eB⟩ and A′={al∣l∈H}. Then the Cayley graph C(A⋊θ(m)B,A′×B) is a directed strongly regular graph with the parameters
[TABLE]
Proof.
Let S=A′×B, first we compute BA′B in the group ring Z[A⋊θ(m)B]:
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
The last equation follows from gcd(l,p)=1 for each l∈H. Then
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
Thus
[TABLE]
Hence from Lemma 7, Cayley graph C(A⋊θ(m)B,A′×B) is a directed strongly regular graph with the parameters
[TABLE]
∎
Remark 2**.**
Indeed, if v=p−1, then we can also get (αp(p−1),α(p−1)2,α(p−1)2,α(p−2)(p−1),α(p−1)2)−DSRG, but it is a SRG in this case.
3.1.2 (pn,n(v+1)−1,p−1nv(v+1),n−2+p−1nv2,n−1+p−1nv2)−DSRG for 1≤v≤p−2
The subset (A′+eA)×B\eA of A⋊θ(m)B means that remove element eA from (A′+eA)×B, so we can get (A′+eA)×B\eA={alxj,ac∣1≤j≤n−1,l∈H∪{0},c∈H},
Theorem 10**.**
Let A=Cp=⟨a⟩, p be an odd prime, m be a primitive root of module p, n be an integer such that p−1∣n. Let B=Cn=⟨x∣xn=eB⟩, and A′={al∣l∈H}. Then the Cayley graph C(A⋊θ(m)B,(A′+eA)×B\eA) is a directed strongly regular graph with the parameters
[TABLE]
Proof.
Let S=(A′+eA)×B\eA), then S=k∈H∑akB+B−eA=A′B+B−eA. Thus
[TABLE]
[TABLE]
[TABLE]
[TABLE]
It follows from equations (8) and (9) in Theorem 9 that
[TABLE]
and
[TABLE]
Then S2 becomes
[TABLE]
[TABLE]
[TABLE]
[TABLE]
Thus
[TABLE]
Hence from Lemma 7, Cayley graph C(A⋊θ(m)B,S) is a directed strongly regular graph with the parameters
[TABLE]
∎
3.2 (mq,m+q−2,qm−1+1,qm−1+q−2,qm−1+q−1)−DSRG
For A be a finite group of order m and some β∈AutA, Duval, Art M., and Dmitri Iourinski [4] define a group automorphism β which has the q-orbit condition if each of its untrivial orbits contains q elements. i.e. If the group ⟨β⟩ ( The subgroup of AutA generated by β) acts on A naturally, then each untrivial orbit have q elements. In other words, β satisfies βq(a)=a, for all a∈A, and βu(a)=a implies q∣u, for all a=eA.
Let A be a finite group of order m and some β∈AutA has the q-orbit condition, let B be the cyclic group of order q with generator b, and define θ:B→AutA by θ(bu)=βu. let A′ be a set of representatives of the nontrivial orbits of β. Duval observed that the Cayley graph C(A⋊θB,A′×B)
is a directed strongly regular graph with the parameters
[TABLE]
A similar result will be given in the next Theorem.
Theorem 11**.**
Let A be a finite group of order m. If some β∈AutA has the
q-orbit condition, let B be the cyclic group of order q with generator b, and define θ:B→AutA by θ(bu)=βu for 1≤u≤q. Let A′ be a set of representatives of the nontrivial orbits of β. Then the Cayley graph C(A⋊θB,(A′+eA)×B\eA)
is a directed strongly regular graph with the parameters
[TABLE]
Proof.
We recall that BA′B=(A−eA)B=AB−B,
A′BA′B=∣A′∣A⋊θB−A′B from the proof of Theorem 3.3 in [4]. Let S=(A′+eA)×B\eA, then
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
Thus
[TABLE]
It now only remains to note that
∣B∣=q, ∣A′∣=qm−1, ∣A⋊θB∣=mq, ∣(A′+eA)×B\eA∣=(qm−1+1)q−1=m+q−2. Hence from Lemma 7, Cayley graph C(A⋊θB,(A′+eA)×B\eA) is a DSRG with the parameters
In the previous sections, we concentrate on the Cayley graph C(G,S), G is a semidirect product of two cyclic group. In this section, we discuss Cayley graph C(G,S) with G=(Cp⋊θ(s)Cn)⋊ϑB, where
Cp=⟨a⟩, Cn=⟨x⟩, and B=⟨y∣yp=eB⟩ is a cyclic group of order p with generator y.
Let s be an integer such that (s,p)=1, s≡1(modp), sn≡1(modp). The map βs∈Aut⟨a⟩ given by βs:ai→asi is an automorphism, and the homomorphism θ(s) from ⟨x⟩ to Aut⟨a⟩ is defined by: xα→βsα.
Let Dp,n,s=Cp⋊θ(s)Cn, the inner automorphism f(g)∈AutDp,n,s is defined by f(g): ϕ→g−1ϕg, for each ϕ∈Dp,n,s. And the map ϑ: B→AutDp,n,s given by ϑ(yu)=f(au) is a homomorphism. Thus,
Dp,n,s⋊ϑB is a group of order p2n. From the definition, we can obtain xtau=austxt easily.
Let E(n) denote with the set of positive integers that are both less n and coprime to n, i.e.E(n)={q∣1≤q≤n−1,(q,n)=1}, so ∣E(n)∣=φ(n).
The next two Lemmas will be used in the proof of Theorem 14.
Lemma 12**.**
Let A=Cpl=⟨a⟩ and A′={ak∣k∈E(pl)}. Then
[TABLE]
Proof.
We compute A′2 in the group ring Z[Cpl]:
[TABLE]
[TABLE]
[TABLE]
For each 1≤j≤pl−1, when k takes over the complete residue system of module pl−1, the k+j also takes over the complete residue system of module pl−1. Then we can get that k=1∑pl−1ap(k+j)=k=1∑pl−1apk. Thus we can obtain that
[TABLE]
[TABLE]
[TABLE]
∎
Lemma 13**.**
Let H⊆{0,1,⋯,p−1}, T⊆{0,1,⋯,n−1}, S={alxi∣l∈H,i∈T}×B. Then
[TABLE]
Proof.
First we compute BA′B in the group ring Z[Dp,n,s⋊ϑB]:
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
Thus
[TABLE]
[TABLE]
[TABLE]
[TABLE]
∎
Theorem 14**.**
Let A=Dp,n,s=Cp⋊θ(s)Cn, p be a prime, s be a primitive root of module p, n be an integer such that p−1∣n. B=⟨y∣yp=eB⟩, A′={alxi∣l∈E(p),i∈{0,1⋯,n−1}}. Then the Cayley graph C(A⋊ϑB,A′×B) is a directed strongly regular graph with the parameters
[TABLE]
Proof.
Let S=A′×B, then from Lemma 13 and Lemma 12 for l=1, we have
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
where X=(p−1)l=0∑p−1al−l∈E(p)∑al. We note that gcd((si−1)si′,p)=1 for each i satisfies si≡1(modp). Then
[TABLE]
[TABLE]
[TABLE]
[TABLE]
where v=∣{i∣si≡1(modp),i∈{0,1,⋯,n−1}}∣=n−p−1n. And
[TABLE]
[TABLE]
[TABLE]
Thus
[TABLE]
We note that v(p−1)2+p(n−v)(p−1)=n(p−1)(p−2)+pn=n(p2−2p+2)=n((p−1)2+1), so
[TABLE]
It now only remains to note that ∣A×ϑB∣=p2n, ∣A′×B∣=pφ(p)n=p(p−1)n and v(p−1)2+p(n−v)(p−1)−p(n−v)=np−1(p−1)3−1. Thus Cayley graph C(A⋊ϑB,A′×B) is a directed strongly regular graph with the parameters
[TABLE]
∎
4 Constructions of DSRG by using Cayley coset graph
For a group G and a subgroup H≤G, denote by [G:H] the set of left cosets of H in
G, that is
[TABLE]
∣G:H∣ is the index of H in G. For any subset S⊂G, we may define a digraph on [G:H] as follows:
Definition 6**.**
Let G be a group, H a subgroup of G, and S a subset of G. define
the Cayley coset graph of G with respect to H and S to be the directed graph with vertex set
[G:H] and such that, for any xH,yH∈V,
xH is connected to yH if and only if x−1y∈HSH,
and denote the digraph by C(G,H,HSH).
We note that if H=1, the Cayley coset graph is a Cayley graph. In this section we just give a sufficient and necessary condition
for a Cayley coset graph to be DSRG in terms of the group ring.
Lemma 15**.**
The number of paths of length 2 from xH to yH in C(G,H,HSH) equals the
coefficient of x−1y in ∣H∣1HSH2.
Proof.
The coefficient of x−1y in HSH2 is the number of ordered pairs (x1,x2)∈HSH×HSH such that x1x2=x−1y.
Let Q be the set of all the ordered pair (x1,x2)∈HSH×HSH such that x1x2=x−1y, P be the set of all paths of length 2 from xH to yH. We define a map η:Q→P by:
[TABLE]
where p(x,z,y) denote with the path xH→zH→yH of length 2.
Let η−1(p) denote with the preimage of p.
At first, we prove that η−1(p(x,z,y))={(x−1zh,h−1z−1y)∣h∈H}.
We can get {(x−1zh,h−1z−1y)∣h∈H}⊂η−1(p(x,z,y)) easily. It now only remains to prove that η−1(p(x,z,y))⊂{(x−1zh,h−1z−1y)∣h∈H}. Indeed, for each (x1,x2)∈η−1(xH→zH→yH), we can obtain that xx1H=zH,
i.e. x1∈x−1zH, so (x1,x2)∈{(x−1zh,h−1z−1y)∣h∈H}. so {(x−1zh,h−1z−1y)∣h∈H}=η−1(p(x,z,y)) and ∣η−1(p(x,z,y))∣=∣H∣.
Secondly, the map η is a surjection obviously. Thus
[TABLE]
Then the result is now immediate.
∎
Theorem 16**.**
The Cayley graph C(G;H;HSH) is a directed strongly regular graph with parameters (n,k,μ,λ,t) if and only if ∣G:H∣=n, ∣H∣∣HSH∣=k, and
[TABLE]
Proof.
Suppose ∣H∣1HSH2=te+λHSH+μ(G−e−HSH), By Lemma 15 then, the number of
paths of length 2 from xH to yH is: t if x−1y=e; i.e. xH=yH; λ if x−1y∈HSH, i.e. xH→yH;
and μ otherwise. Thus, we can get C(G,H,HSH) is a directed strongly regular graph. The reverse direction is a direct consequence of Lemma 15.
∎
Remark 3**.**
if H=1, we can get Lemma 7 from Theorem 16 easily.
5 Sufficient and necessary condition of Cayley graph C(Cn⋊θ(k)Cm,S) to be DSRG
In this section, we focus on the sufficient and necessary conditions of Cayley graphs C(Cn⋊θ(k)Cm,A′×Cm) and C(Cn⋊θ(k)Cm,(A′+eA)×Cm\eA) to be DSRG, where A′ is a proper subet of Cn∖e. These sufficient and necessary conditions can be used to verify Cayley graphs which constructed in section 3.1, 3.2, and [4],[10] are DSRGs.
Let x be a generator for Cn and y a generator for Cm. Let k be an integer such that (k,n)=1, k≡1(modn), km≡1(modn). Then the map βk∈AutCn given by βk :xi→xki is an automorphism, and the map θ(k): Cm→AutCn given by θ(k)(yu)=βku is a homomorphism. A′={xa∣a∈H}, where H is a proper subset of {1,2,⋯,n−1} with ∣H∣=v.
5.1 A sufficient and necessary condition of Cayley graph
C(Cn⋊θ(k)Cm,A′×Cm) to be DSRG
At first, we give some basic definitions of group representation theory.
Let V be a vector space over the field C of complex numbers and let
GL(V) be the group of isomorphisms of V onto itself. Let GLn(C) be the general linear group consisting of all invertible matrices of order n. A representation of G in V is a homomorphism from the group G into the group GL(V). Let ρ and ρ′ be two representations of the same group G in vector spaces V and V′, these representations are said to be isomorphic if there exists a linear isomorphism ω:V→V′, which satisfies the identity
[TABLE]
for all g∈G.
Let ρ be a representations of group G in vector spaces V with dimCV=n. Choose a basis for V, and let T:V→Cn be the isomorphism taking coordinates with respect to this basis. Then setting φg=TρgT−1, for g∈G, yields a representation φ:G→GLn(C) isomorphic to ρ. So, lf ρ and ρ′ are given in matrix form by φg and φg′ respectively, then ρ and ρ′ are isomorphic
means that there exists an invertible matrix H such that for all g∈G
[TABLE]
Definition 7**.**
(see [14])
Given a group G and an element g∈G, let Ag=A(C(G,{g})), the adjacent matrix of Cayley graph C(G,{g}).
Additionally, given a group G and a multiset S of elements of G, let AS=A(C(G,S)). Then we can define the map ψ:G→GL∣G∣(C) gived by g→Ag.
Definition 8**.**
(see [14])
Let Rh be h×h matrix with entries 1 in positions (1,2),(2,3),⋯,(h−1,h),(h,1). Let Ωh=diag{e2πinhk0,e2πinhk1,⋯,e2πinhkm−1} be m×m matrix satisfy km≡1(modn). Let X=diag{Ω1,Ω2,⋯,Ωn} and Y=diag{Rm,Rm,⋯,Rm} be two n×n block matrices with m×m blocks.
We can also define the map ψ:Cn⋊θ(k)Cm→GLnm(C) gived by xayb→XaYb.
Lemma 17**.**
(see [14])
ψ and ψ are two representations of Cn⋊θ(k)Cm in GLnm(C) and these two representations
of Cn⋊θ(k)Cm are isomorphic group representations.
Remark 4**.**
(see [14])
Now we know that these representations are isomorphic, then there exists an invertible matrix H such that for each g∈G
[TABLE]
So ψg and ψg will have the same characteristic polynomial and minimum polynomial.
Lemma 18**.**
(see [14])
Given a group G and a multiset S of elements of G, then
[TABLE]
The symbol χ(A,γ) and χ0(A,γ) are denoted with characteristic polynomial and minimum polynomial of A respectively.
Lemma 19**.**
Let matrix A=diag{a1,a2,⋯,an}Jn, then the minimum polynomial χ0(A,γ) of A is a factor of γ(γ−i=1∑nai). Particularly, if i=1∑nai=0, then χ0(A,γ)=γ(γ−i=1∑nai).
Proof.
Let s=i=1∑nai, then
[TABLE]
Thus χ0(A,γ)∣γ(γ−i=1∑nai). Suppose i=1∑nai=0, then A=0 and A=(i=1∑nai)I, so χ0(A,γ)=γ(γ−i=1∑nai).
∎
Definition 9**.**
Let Su=h=0∑m−1a∈H∑e2πinuakh and Eu(h)=a∈H∑e2πinuakh for 0≤u≤n−1, 0≤h≤m−1. Then S0=vm.
In [14], Nathan Foxa gave an expression of characteristic polynomial of the semidirect product of
two cyclic groups and this result will be represented in the following Lemma.
Lemma 20**.**
(see [14])
The characteristic polynomial of the semidirect product of two cyclic groups is given by the following:
[TABLE]
Particularly, let S=A′×Cm, then
[TABLE]
Proof.
The first assertion is from [14]. To prove the second assertion, we note that if S=A′×Cm, then
[TABLE]
[TABLE]
[TABLE]
Then
[TABLE]
[TABLE]
Thus
[TABLE]
Then the result follows.
∎
In a similar way, we will give an expression of minimum polynomial of the semidirect product of two cyclic groups.
Let lcm{f1(γ),f2(γ),⋯,fn−1(γ),fn(γ)}=lcm{fu(γ)∣1≤u≤n} denote with the least common multiple polynomial among the following polynomials f1(γ),f2(γ),⋯,fn−1(γ),fn(γ).
Lemma 21**.**
The minimum polynomial of the semidirect product of two cyclic groups is given by the following:
Since s∈G, it can be written uniquely as xayb for some 0≤a<n and
some 0≤b<m. From the Lemma 17 and Remark 4, we have
[TABLE]
From the definition of X and Y in Definition 8, we can obtain that the minimum polynomial of A(C(Cn⋊θ(k)Cm,A′×Cm) is
[TABLE]
We can get
[TABLE]
from Lemma 19 and the equation (10) in Lemma 20. Thus from (11), we can obtain that
[TABLE]
This proves the first assertion. Additionally, if Su=0 for each 1≤u≤n−1, then from Lemma 19, we have
[TABLE]
The second assertion is proved.
∎
In the following theroem, we will give a sufficient and necessary condition of Cayley graph C(Cn⋊θ(k)Cm,A′×Cm) to be DSRG with parameters (nm,vm,μ,λ,t) and propositions (⋆)t=μ, μ−λvm=n−1 in term of S1, S2, ⋯, Sn−1.
We note that both (pn,vn,p−1nv2,p−1nv(v−1),p−1nv2)−DSRG and (mq,m−1,(m−1)/q,((m−1)/q)−1,(m−1)/q)−DSRG satisfy propositions (⋆).
The r,s,ρ,σ occuring in the following Theorems 22,23 are defined as Proposition 2.
Theorem 22**.**
Cayley graph C(Cn⋊θ(k)Cm,A′×Cm) is a DSRG with parameters (nm,vm,μ,λ,t) and t=μ, μ−λvm=n−1 if and only if S1=S2⋯=Sn−1 are negative integers.
Proof.
Let A=A(C(Cn⋊θ(k)Cm,A′×Cm)). If C(Cn⋊θ(k)Cm,A′×Cm) is a DSRG with parameters (nm,vm,μ,λ,t) and t=μ, μ−λvm=n−1. Then from Proposition 2, the three distinct eigenvalues of it are vm, ρ=0 and σ=λ−μ<0 with multiplicities 1,r=μ−λ−vm+(μ−λ)(nm−1)=n(m−1),s=ρ−σvm+ρ(nm−1)=μ−λvm=n−1 respectively. From the Lemma 20, the characteristic polynomial of A is (γ−vm)γn(m−1)(γ−σ)n−1=γn(m−1)(γ−vm)u=1∏n−1(γ−Su),
so S1=S2⋯=Sn−1=σ<0.
On the other hand, suppose S1=S2⋯=Sn−1 are negative integer d, then from the Lemma 21,
the minimum polynomial of A is lcm{γ(γ−Su)∣0≤u≤n−1}=γ(γ−vm)(γ−d), and
AJ=JA=vm. Then A(A−vmI)(A−dI)=0. Let B=A(A−dI), so (A−vmI)B=AB−vmB=0, i.e. AB=vmB, then each column of B
is an eigenvector corresponding to simple eigenvalue vm (from the Perron-Frobenius theory, can see, e.g., Horn and
Johnson[15]), but the eigenspace associated with the eigenvalue vm has
dimension one and hence each column of B is a suitable multiple of 1nm. Let B=(b11nm,b21nm,⋯,bnm1nm), since 1nmTB=1nmTA(A−dI)=vm(vm−d)1nmT, we can get nmb1=nmb2=⋯=nmbn=vm(vm−e). Thus A(A−dI)=B=nv(vm−d)J≜μJ, then
[TABLE]
where μ+d≜λ. Thus Cayley graph C(Cn⋊θ(k)Cm,A′×Cm) is a DSRG with parameters (nm,vm,μ,λ,t) and t=μ. Additionally, from Lemma 20 the characteristic polynomial of A is
χ(A(C(Cn⋊θ(k)Cm,A′×Cm)),γ)=γn(m−1)(γ−vm)u=1∏n−1(γ−d)=γn(m−1)(γ−vm)u=1∏n−1(γ−(λ−μ)), hence ρ=0, σ=λ−μ, and the multiplicity of eigenvalue σ=λ−μ is s=n−1 which implies that s=ρ−σvm+ρ(nm−1)=μ−λvm=n−1, then the result follows.
∎
Remark 5**.**
We can verify Theorem 9 from Theorem 22, recalling the conditions in the Theorem 9, Cayley graph C(Cp⋊θ(m)Cn,A′×Cn) satisfies S0=vn, and
[TABLE]
for 1≤u≤p−1, so C(Cp⋊θ(m)Cn,A′×Cn) is a DSRG with parameters (pn,vn,μ,λ,t) such that t=μ, λ−μ=−p−1nv, and μ=pv(vn+p−1nv)=p−1nv2, i.e.(pn,vn,p−1nv2,p−1nv(v−1),p−1nv2).
A generalized result will be exhibited in the following Theorem.
Theorem 23**.**
Cayley graph C(Cn⋊θ(k)Cm,A′×Cm) is a DSRG with given s,σ<0 if and only if s numbers in S1,S2⋯,Sn−1 have same value σ and others are [math], and if Su=0, then Eu(h)=0 for 0≤h≤m−1.
Proof.
Let A=A(C(Cn⋊θ(k)Cm,A′×Cm)). Suppose C(Cn⋊θ(k)Cm,A′×Cm) is a DSRG with given s,σ<0, then from Proposition 2 and Lemma 20, the characteristic polynomial of A is (γ−vm)(γ−ρ)r(γ−σ)s=γn(m−1)(γ−vm)u=1∏n−1(γ−Su).
Thus ρ=0, and s numbers in S1,S2⋯,Sn−1 have same value σ. And if Su=0, we can obtain that a∈H∑(Ωua)J=0. Otherwise, χ0(a∈H∑(Ωua)J,γ)=γ2, then from lemma 21, the power of factor γ in χ0(A) greater than 1, this is a contradiction to χ0(A)=(γ−vm)γ(γ−σ). Thus from equation (10), we can get Eu(h)=0 for each 0≤h≤m−1.
On the other hand, if S1,S2⋯,Sn−1 satisfy the conditions, then from the Lemma 21,
the minimum polynomial of A is lcm{γ(γ−vm),γ,γ−σ}=(γ−vm)γ(γ−σ). Similar to the proof of Theorem 22, we can also obtain that the Cayley graph C(Cn⋊θ(k)Cm,A′×Cm) is a DSRG.
Additionally, from Lemma 20, the characteristic polynomial of A is
χ(A(C(Cn⋊θ(k)Cm,A′×Cm)),γ)=(γ−σ)s(γ−vm)γr, then the result follows.
∎
Remark 6**.**
If Cayley graph C(Cn⋊θ(k)Cm,A′×Cm) is a DSRG with parameters (nm,vm,μ,λ,t), then t=μ.
5.2 A sufficient and necessary condition of Cayley graph
C(Cn⋊θCm,(A′+eA)×Cm\eA) to be DSRG
When n is even,
Hobart, Sylvia A., and T.Justin Shaw in [10] constructed Cayley graph C(G,S) with dihedral group G=Dn=⟨b,a∣bn=a2=e,ab=b−1a⟩, and
S={b,b2,⋯,b2n−1,a,ab,ab2,⋯,ab2n−1}={b0,b1,⋯,b2n−1}×{a0,a1}\{b0}. This Cayley graph is a DSRG with parameters (2n,n−1,2n−1,2n−1,2n).
In this section, we will investigate C(Cn⋊θCm,(A′+eA)×Cm\eA) respect to it. Let H be a proper subset of {1,2,⋯,n−1} with ∣H∣=v. And (A′+eA)×Cm\eA={xayb,xc∣1≤b≤m−1,a∈H∪{0},c∈H}.
Definition 10**.**
Let Su∗=h=0∑m−1a∈H∪{0}∑e2πinuakh and Eu∗(h)=a∈H∪{0}∑e2πinuakh for 0≤u≤n−1, 0≤h≤m−1. Then S0∗=(v+1)m.
We can also obtain the characteristic polynomial and minimum polynomial of Cayley graph C(Cn⋊θ(k)Cm,(A′+eA)×Cm\eA)) as section 5.1. Let S∗=(A′+eA)×Cm\eA.
Lemma 24**.**
The characteristic polynomial of the C(Cn⋊θ(k)Cm,S∗) is given by the following:
The minimum polynomial of C(Cn⋊θ(k)Cm,S∗) is given by the following:
[TABLE]
Proof.
From the Lemma 19 and the equation (12) in Lemma 24, we have
[TABLE]
then the result follows from Lemma 21 by replacing γ with γ+1.
∎
Theorem 26**.**
Cayley graph C(Cn⋊θ(k)Cm,S∗) is a DSRG with given r,ρ if and only if r numbers in S1∗,S2∗⋯,Sn−1∗ have same value 1+ρ and others are [math], and if Su∗=0, then Eu∗(h)=0 for 0≤h≤m−1.
Proof.
Let A=A(C(Cn⋊θ(k)Cm,S∗)). Suppose Cayley graph C(Cn⋊θ(k)Cm,S∗) is a DSRG with given r,ρ. Then from Proposition 2 and Lemma 24, the characteristic polynomial of A is (γ+1−(v+1)m)(γ−ρ)r(γ−σ)s=u=0∏n−1(γ+1)m−1(γ+1−Su).
Thus σ=−1, and r numbers in S1∗,S2∗⋯,Sn−1∗ has same value 1+ρ. We note that χ0(A)=(γ+1−vm)(γ+1)(γ−ρ), which imply that if Su∗=0, then a∈H∪{0}∑(Ωua)J=0. Thus from equation (12), we can get Eu∗(h)=0 for all 0≤h≤m−1.
On the other hand, suppose S1∗,S2∗⋯,Sn−1∗ satisfy the conditions, then from the Lemma 25,
the minimum polynomial of A is lcm{γ(γ+1−(v+1)m),γ+1,γ−ρ}=(γ+1−(v+1)m)(γ+1)(γ−ρ). Similar to the proof of Theorem 22, the Cayley graph C(Cn⋊θ(k)Cm,S∗) is a DSRG.
Additionally, the characteristic polynomial of A is
χ(A(C(Cn⋊θ(k)Cm,S∗)),γ)=(γ+1)s(γ+1−(v+1)m)(γ−ρ)r, then the result follows.
∎
Remark 7**.**
(1). If Cayley graph C(Cn⋊θ(k)Cm,S∗) is a DSRG with parameters (nm,m(v+1)−1,μ,λ,t), then t=λ+1. Indeed, from Proposition 1, σ=−1 imples that (λ−μ+2)2=d=(λ−μ)2+4(t−μ), i.e. t=λ+1.
(2). Using Theorem 26, we can verify C(Dn,S) constructed by Hobart, Sylvia A.,and T.Justin Shaw is a DSRG with parameters (2n,n−1,2n−1,2n−1,2n) easily. Indeed,
C(Dn,S) satisfies S0=2×2n=n, and Su∗=h=0∑1a=0∑2n−1e2πinua(−1)h=a=0∑n−1e2πinua+1−eπiu=1−(−1)u. Thus
[TABLE]
and if Su∗=0, then 2∣u, so Eu∗(h)=a=0∑2n−1e2πinu(−1)h=1−e2πinu(−1)h1−e2πinu2n(−1)h=0. From Theorem 26, the Cayley graph C(Dn,S) is a DSRG with r=2n, ρ=1, σ=−1. Thus the parameters of C(Dn,S) is (2n,n−1,2n−1,2n−1,2n).
(3). We can verify Theorem 10 from Theorem 26. Indeed, under the hypothesis of Theorem 10, the Cayley graph C(Cp⋊θ(m)Cn,(A′+eA)×Cm\eA) satisfies
[TABLE]
for each 1≤u≤p−1, so Cayley graph C(Cp⋊θ(m)Cn,(A′+eA)×Cm\eA) is a DSRG with ρ=n−1−p−1nv, r=n−1, and σ=−1. Thus
the parameters of it is (pn,n(v+1)−1,p−1nv(v+1),n−2+p−1nv2,n−1+p−1nv2).
6 The out(in)-neighbour set and automorphsim group of DSRG (Cayley graphs)
6.1 The out(in)-neighbour set of DSRG(Cayley graphs)
In this section, we make a discussion of the vertices which have the same out-neighbour set (or in-neighbour set), the following Lemma gives an upper bound of the number of these vertices. Throughout this section, digraph D is directed strongly regular graph with parameters (n,k,μ,λ,t).
Lemma 27**.**
(see [12])
If a DSRG with parameters (n,k,μ,λ,t) has a set S of vertices, all of which have the same set N of out-neighbour set (or they all have the same set of in-neighbour set), then ∣S∣≤k−λ, ∣S∣≤n−2k+t.
Definition 11**.**
Let S1, S2, ⋯, St be the partition of V(D) such that any two vertices from the same Si have the same out-neighbour set and any two vertices from distinct Si have distinct out-neighbour set. We denote this partition with Pout(D)={S1,S2,⋯,St}. For in-neighbour set, we can also define Pin(D) as above.
From Lemma 27, we can obtain that ∣Si∣≤min{k−λ,n−2k+t} for all 0≤i≤t. The following Lemma gives an improvement of Lemma 27, and this Lemma gives an upper bound of ∣Si∣+∣Sj∣ for distinct i and j.
Lemma 28**.**
If D a directed strongly regular graph with parameters (n,k,μ,λ,t), and λ>0. Then for distinct 0≤i,j≤t, ∣Si∣+∣Sj∣≤max{k,n−2k+2β}, where β=min{k−λ,μ,n−2k+t}.
Proof.
We can assume i=1 and j=2. At first, we claim that ND+(S2)⊈S1, ND+(S1)⊈S2, as ∣S1∣≤k−λ<k=∣ND+(S2)∣, ∣S2∣≤k−λ<k=∣ND+(S1)∣ from Lemma 27. Since D is loopless, we have S1∩S2=∅, S1∩ND+(S1)=S2∩ND+(S2)=∅
Case 1. ∣S1∣+∣S2∣≤k.
Case 2. If ∣S1∣+∣S2∣>k, then ND+(S1)∩ND+(S2)=∅. Thus ∣S1∣+∣S2∣≤n+∣S1∩ND+(S2)∣+∣S2∩ND+(S1)∣−2k. Let u=∣S2∩ND+(S1)∣≤∣S2∣≤n−2k+t, z=∣S1∩ND+(S2)∣≤∣S1∣≤n−2k+t, then ∣S1∣+∣S2∣≤n−2k+u+z.
Case 2.1. S1⊈ND+(S2), S2⊈ND+(S1). See the Figure 1.
Let v∈S1\ND+(S2), w∈ND+(S2)\S1, x∈S2\ND+(S1), y∈ND+(S1)\S2. Since v↛w, we can obtain that S2∩ND+(S1)⊆ND+(v)∩ND−(w), so u≤μ; Since v↛x, then ∣ND+(S1)\S2∣≥μ, and u≤k−μ; Since v→y, then ∣ND+(S1)\S2∣≥λ, and u≤k−λ. Thus u≤min{k−μ,k−λ,μ,n−2k+t}≜α. In a similar way, z≤α, then ∣S1∣+∣S2∣≤n−2k+u+z=n−2k+2α.
Case 2.2. S1⊈ND+(S2), S2⊆ND+(S1). See the Figure 2.
We can also get z≤min{k−μ,k−λ,μ,n−2k+t}≐α as case 2.1. To give an upper bound on u, let v∈S1\ND+(S2), w∈ND+(S2)\S1, and y∈ND+(S1)\S2. Similar to the discussion of case 2.1, we can also obtain that u≤min{k−λ,μ,n−2k+t}≜β. Thus ∣S1∣+∣S2∣≤n−2k+u+z=n−2k+α+β≤n−2k+2β.
Case 2.3. S2⊈ND+(S1), S1⊆ND+(S2). We also have ∣S1∣+∣S2∣≤n−2k+u+z=n−2k+α+β≤n−2k+2β.
Case 2.4. S2⊆ND+(S1), S1⊆ND+(S2). We also have ∣S1∣+∣S2∣≤n−2k+2β.
Base on our discussion, the result follows.
∎
Theorem 29**.**
*Let D be a directed strongly regular Cayley graph C(G,S) with parameters (n,k,μ,λ,t). Let GS={g∣g∈G,gS=S} be a subgroup of G, and G=i=1⋃qaiGS to be the left coset decomposition of G with respect
to GS, where q=∣G:GS∣ is the index of GS in G. Then we have
(a)Pout(D)={a1GS,a2GS,⋯,aqGS};
(b)∣aiGS∣=∣GS∣≤min{k−λ,n−2k+t};
(c)∣GS∣ is a factor of gcd(n,k,λ,μ,t);
(d)GS={1G} if t=μ or gcd(n,k,λ,μ,t)=1.*
Proof.
We note that for distinct vertices x,y∈G, the out-neighbour set of x,y are xS,yS respectively, then xS=yS⇔x−1y∈GS⇔xGS=yGS. Hence Pout(D)={a1GS,a2GS,⋯,aqGS}, proving (a). The assertion (b) follows from Lemma 27 and the assertion (c) can be directly deduced by the Definition 11. Finally, if t=μ, then for each g∈GS, we multiply g on the left side of equation (7), we can get
[TABLE]
Note that S2=(t−μ)e+(λ−μ)S+μG, so g=e and GS={eG}. On the other hand, if gcd(n,k,λ,μ,t)=1, then from assertion (c), we can also obtain that ∣GS∣=1, GS={eG}, proving (d).
∎
Let S−1={a−1∣a∈S}, then we can also obtain the following theorem as above.
Theorem 30**.**
*Let D be a directed strongly regular Cayley graph C(G,S) with parameters (n,k,μ,λ,t). Let GS−1={g∣g∈G,gS−1=S−1}, and G=i=1⋃q′aiGS−1 to be the left coset decomposition of G with respect
to GS−1, where q′=∣G:GS−1∣ is the index of GS−1 in G. Then we have
(a)Pin(D)={a1′GS−1,a2′GS−1,⋯,aq′′GS−1};
(b)∣aiGS−1∣=∣GS−1∣≤min{k−λ,n−2k+t};
(c)∣GS−1∣ is a factor of gcd(n,k,λ,μ,t);
(d)GS−1={1G} if gcd(n,k,λ,μ,t)=1.*
Proof.
We note that for distinct vertices x,y∈G, the in-neighbour set of x,y are xS−1,yS−1 respectively, then xS−1=yS−1⇔x−1y∈GS−1⇔xGS−1=yGS−1. Then Pin(D)={a1′GS−1,a2′GS−1,⋯,at′GS−1}, proving (a). The assertion (b) follows from Lemma 27, and the assertion (c) can be directly deduced by the Definition 11. Finally, from assertion (c), we can also obtain that ∣GS∣=1, GS={eG}, proving (d).
∎
Definition 12**.**
Let C(G,S) be a DSRG. The digraph Sout(C(G,S)) is defined by V(Sout(C(G,S)))=[G:GS]={a1GS,a2GS,⋯,aqGS}, and aiGS→ajGS if only if ai−1aj∈S, i.e. E(Sout(C(G,S)))={(aiGS,ajGS)∣(ai,aj)∈C(G,S)}.
We can also define digraph Sin(C(G,S)) with V(Sin(C(G,S)))=[G:GS−1]={a1′GS−1,a2′GS−1,⋯,aq′′GS−1} and E(Sin(C(G,S)))={(aiGS−1,ajGS−1)∣(ai,aj)∈C(G,S)}.
Theorem 31**.**
*Let C(G,S) be a directed strongly regular Cayley graph with parameters (n,k,μ,λ,t),
then digraphs
(1) Sout(C(G,S)) is a (∣GS∣n,∣GS∣k,∣GS∣μ,∣GS∣λ,∣GS∣t)−DSRG;
(2) Sin(C(G,S)) is a (∣GS−1∣n,∣GS−1∣k,∣GS−1∣μ,∣GS−1∣λ,∣GS−1∣t)−DSRG.*
Proof.
We first prove the assertion for Sout(C(G,S)).
From the definition of Sout(C(G,S)), we have |V(\mathcal{S}_{out}(\mathcal{C}(G,S)))|$$=\frac{n}{|G_{S}|}, dSout(C(G,S))−(aiGS)=∣GS∣k, and dSout(C(G,S))+(aiGS)≥∣GS∣k for all 1≤i≤q.
We note that
[TABLE]
Then dSout(C(G,S))−(aiGS)=dSout(C(G,S))+(aiGS)=∣GS∣k, so Sout(C(G,S)) is regular digraph.
If aiGS→ajGS, then ai→aj in C(G,S). Hence in C(G,S), the number of paths of length two from the vertex ai to the vertex aj is λ, so the number of paths of length two from the vertex aiGS to the vertex ajGS is ∣GS∣λ in Sout(C(G,S)).
If aiGS↛ajGS, then ai↛aj in C(G,S). Hence in C(G,S),
the number of paths of length two from the vertex ai to the vertex aj is μ, then the number of paths of length two from the vertex aiGS to the vertex ajGS is ∣GS∣μ in Sout(C(G,S)). If aiGS=ajGS, then aiGS contains in the ∣GS∣t2−cycle exactly. Thus Sout(C(G,S)) is a DSRG with parameters (∣GS∣n,∣GS∣k,∣GS∣μ,∣GS∣λ,∣GS∣t).
The similar result for Sin(C(G,S)) is also hold, since dSin(C(G,S))+(aiGS−1)=∣GS−1∣k, dSin(C(G,S))−(aiGS−1)≥∣GS−1∣k for each 1≤i≤q′.
∎
Remark 8**.**
These digraphs Sout(C(G,S)) and Sin(C(G,S)) are different from Cayley coset graph.
6.2 The automorphsim group of DSRG(Cayley graphs)
In this section, we give an upper bound of ∣Aut(C(G,S))∣ in term of ∣GS∣ and ∣GS−1∣.
Theorem 32**.**
Let D be a directed strongly regular Cayley graph C(G,S) with parameters (n,k,μ,λ,t). Then
[TABLE]
Proof.
let τ∈Aut(C(G,S)), if x and y have the same out-neighbour set, then τ(x) and τ(y) also have the same out(in)-neighbour set. Thus for each 1≤i≤q, τ maps all vertices in aiGS to another coset ajiGS for some ji, where j1,j2,⋯,jq is a permutation of 1,2,⋯,q. Thus
∣Aut(C(G,S))∣≤(∣GS∣n)!(∣GS∣)!. In a similar way, we can also get
∣Aut(C(G,S))∣≤(∣GS−1∣n)!(∣GS−1∣)!.
∎
Acknowledgements
The author are grateful to those of you who support to us.
References
[1]
A. M. Duval, A directed graph version of strongly regular graphs, Journal of
Combinatorial Theory, Series A 47 (1) (1988) 71–100.
[2]
J. A. Bondy, U. S. R. Murty, Graph theory with applications, Vol. 290,
Citeseer, 1976.
[3]
F. Fiedler, M. Klin, C. Pech, Directed strongly regular graphs as elements of
coherent algebras, General Algebra and Discrete Mathematics, Shaker Verlag,
Aachen (1999) 69–87.
[4]
A. M. Duval, D. Iourinski, Semidirect product constructions of directed
strongly regular graphs, Journal of Combinatorial Theory, Series A 104 (1)
(2003) 157–167.
[5]
F. Fiedler, M. Klin, M. H. Muzychuk, Small vertex-transitive directed strongly
regular graphs, Discrete mathematics 255 (1) (2002) 87–115.
[6]
M. Klin, A. Munemasa, M. Muzychuk, P.-H. Zieschang, Directed strongly regular
graphs via coherent (cellular) algebras, preprint Kyushu-MPS-1997-12, Kyushu
University.
[7]
F. Adams, A. Gendreau, O. Olmez, S. Y. Song, Construction of directed strongly
regular graphs using block matrices, arXiv preprint arXiv:1311.0494.
[8]
O. Olmez, S. Y. Song, Construction of directed strongly regular graphs using
finite incidence structures, arXiv preprint arXiv:1006.5395.
[9]
A. Brouwer, O. Olmez, S. Y. Song, Directed strongly regular graphs
from-designs, European Journal of Combinatorics 33 (6) (2012) 1174–1177.
[10]
S. A. Hobart, T. Justin Shaw, A note on a family of directed strongly regular
graphs, European Journal of Combinatorics 20 (8) (1999) 819–820.
[11]
R. Feng, L. Zeng, Construction of directed strongly regular graphs as
generalized cayley graphs, arXiv preprint arXiv:1410.1161.
[12]
L. K. Jørgensen, Directed strongly regular graphs with rank 5, Linear
Algebra and Its Applications 477 (2015) 102–111.
[13]
J. Ma, B. Zhang, J. Liu, J. Zhao, Directed strongly regular graphs with rank 6,
Discrete Mathematics.
[14]
N. Foxa, Spectra of semidirect products of cyclic groups, Rose-Hulman
Undergraduate Mathematics Journal 11 (2).
[15]
R. A. Horn, C. R. Johnson, Matrix analysis, Cambridge university press, 2012.
Bibliography15
The reference list from the paper itself. Each links out to its DOI / PubMed record.
1[1] A. M. Duval, A directed graph version of strongly regular graphs, Journal of Combinatorial Theory, Series A 47 (1) (1988) 71–100.
2[2] J. A. Bondy, U. S. R. Murty, Graph theory with applications, Vol. 290, Citeseer, 1976.
3[3] F. Fiedler, M. Klin, C. Pech, Directed strongly regular graphs as elements of coherent algebras, General Algebra and Discrete Mathematics, Shaker Verlag, Aachen (1999) 69–87.
4[4] A. M. Duval, D. Iourinski, Semidirect product constructions of directed strongly regular graphs, Journal of Combinatorial Theory, Series A 104 (1) (2003) 157–167.
5[5] F. Fiedler, M. Klin, M. H. Muzychuk, Small vertex-transitive directed strongly regular graphs, Discrete mathematics 255 (1) (2002) 87–115.
6[6] M. Klin, A. Munemasa, M. Muzychuk, P.-H. Zieschang, Directed strongly regular graphs via coherent (cellular) algebras, preprint Kyushu-MPS-1997-12, Kyushu University.
7[7] F. Adams, A. Gendreau, O. Olmez, S. Y. Song, Construction of directed strongly regular graphs using block matrices, ar Xiv preprint ar Xiv:1311.0494.
8[8] O. Olmez, S. Y. Song, Construction of directed strongly regular graphs using finite incidence structures, ar Xiv preprint ar Xiv:1006.5395.

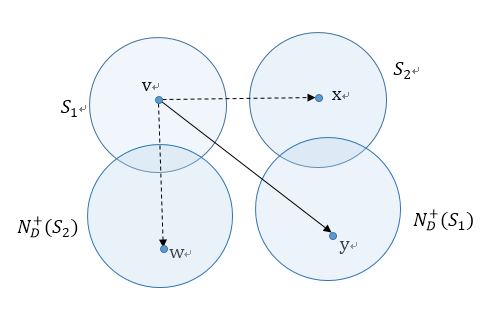 Figure 1
Figure 1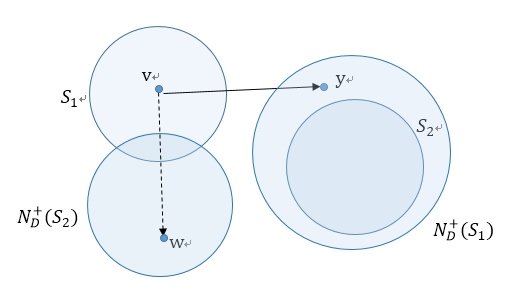 Figure 2
Figure 2