Continuous-Time Visual-Inertial Odometry for Event Cameras
Elias Mueggler, Guillermo Gallego, Henri Rebecq, Davide Scaramuzza

TL;DR
This paper introduces a continuous-time visual-inertial odometry method for event cameras, leveraging a smooth trajectory representation to improve accuracy and enable effective sensor fusion.
Contribution
It is the first to combine continuous-time trajectory modeling with event cameras and inertial data for visual-inertial odometry.
Findings
Improved accuracy over state-of-the-art methods.
Effective fusion of event data and inertial measurements.
Accurate recovery of map orientation and scale.
Abstract
Event cameras are bio-inspired vision sensors that output pixel-level brightness changes instead of standard intensity frames. They offer significant advantages over standard cameras, namely a very high dynamic range, no motion blur, and a latency in the order of microseconds. However, due to the fundamentally different structure of the sensor's output, new algorithms that exploit the high temporal resolution and the asynchronous nature of the sensor are required. Recent work has shown that a continuous-time representation of the event camera pose can deal with the high temporal resolution and asynchronous nature of this sensor in a principled way. In this paper, we leverage such a continuous-time representation to perform visual-inertial odometry with an event camera. This representation allows direct integration of the asynchronous events with micro-second accuracy and the inertial…
Click any figure to enlarge with its caption.
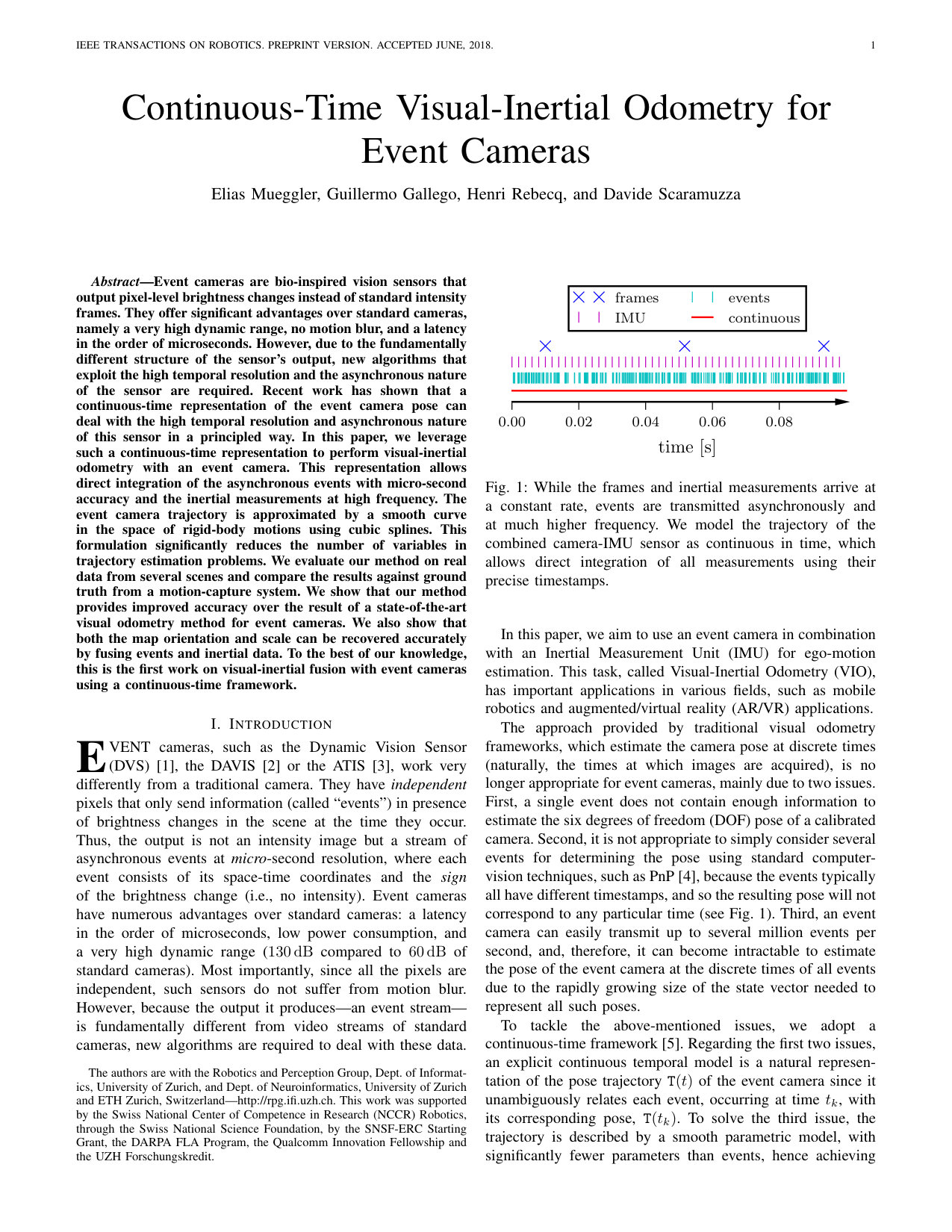 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
See pages 1-last of main.pdf